Изобретение относится к измерительной технике и может быть использовано для определения положения объекта, перемещающегося в широком диапазоне значений перемещений.
Известен способ определения перемещений объекта [1], основанный на преобразовании электрических колебаний в ультразвуковые колебания на первой частоте f1, излучении ультразвуковых колебаний в направлении контролируемого объекта, приеме отраженных ультразвуковых колебаний приемником с известной акустической базой по отношению к излучателю, измерении разности фаз между принятыми и излучаемыми колебаниями, изменении частоты колебаний до значения fк, при котором разность фаз изменится на 2(К-1) π, и определении перемещения объекта по формуле
L= 
 где К-1 - изменение количества длин волн ультразвуковых колебаний, укладывающихся между излучателем и приемником, при изменении частоты колебаний от f1 до fк;
где К-1 - изменение количества длин волн ультразвуковых колебаний, укладывающихся между излучателем и приемником, при изменении частоты колебаний от f1 до fк;
V - скорость распространения ультразвуковых колебаний;
ε - поправка, зависящая от расстояния между излучателем и приемником (акустической базы) и направленности излучения.
Если в процессе изменения частоты количество длин волн изменяется на одну длину волны, то разность фаз изменяется только на 2 π и формула приобретает вид
L= )·
)·
Наиболее близким к изобретению является известный акустоэлектронный способ определения перемещений объекта, заключающийся в том, что в неподвижной пьезоэлектрической пластине излучающим встречно-штыревым преобразователем возбуждают поверхностную акустическую волну (ПАВ), принимают ее приемным встречно-штыревым преобразователем, установленным на подвижной пьезоэлектрической пластине, предназначенной для связи с перемещаемым объектом, измеряют разность фаз между принятым и опорным сигналами и используют ее при определении перемещения объекта [2].
Недостатком известного способа является низкая точность определения перемещения ввиду невозможности обеспечения измерения целого числа фазовых циклов и зависимости результата от изменения скорости распространения ПАВ при изменении внешних условий.
Целью изобретения является повышение точности определения перемещений объекта.
Цель достигается тем, что по акустоэлектронному способу определения перемещений объекта, заключающемуся в том, что в неподвижной пьезоэлектрической пластине излучающим встречно-штыревым преобразователем возбуждают ПАВ, принимают ее приемным встречно-штыревым преобразователем, установленным на подвижной пьезоэлектрической пластине, предназначенной для связи с перемещаемым объектом, измеряют разность фаз между принятым и опорным сигналами и используют ее при определении перемещения объекта, измерение разности фаз осуществляют на частоте f1 синхронизма встречно-штыревых преобразователей с задержкой τ << 1/f1 опорного сигнала и без задержки опорного сигнала, изменяют частоту сигналов при втором измерении до частоты f2, при которой разность фаз сигналов соответствует разности фаз при первом измерении, а перемещение объекта определяют с учетом частот f1, f2 возбуждаемых сигналов, выбранной задержки τ и скорости V распространения ПАВ.
Цель достигается также тем, что задержку опорного сигнала осуществляют путем приема ПАВ на неподвижной пьезоэлектрической пластине дополнительным встречно-штыревым преобразователем, установленным от излучающего на расстоянии Zo = τ V, с учетом которого определяют искомый параметр.
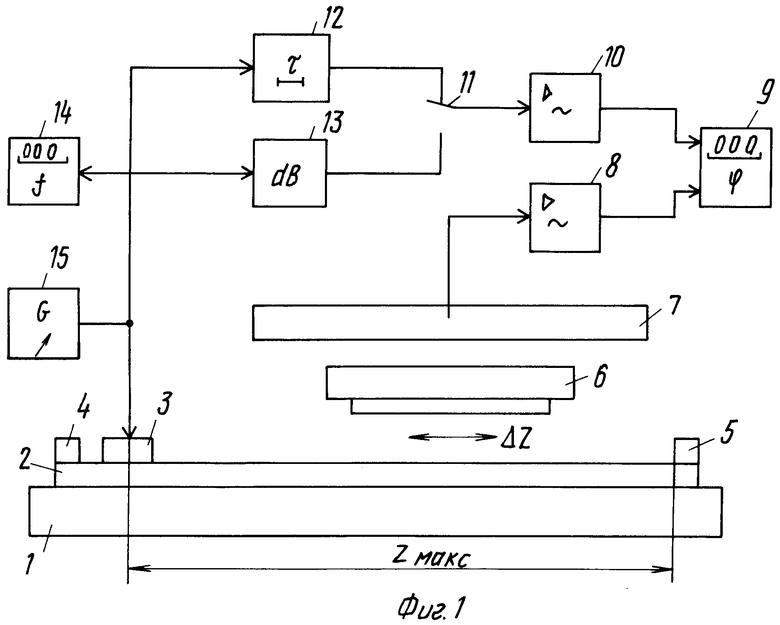
На фиг. 1 и 2 представлены варианты устройства для измерения перемещений.
Устройство для измерения перемещений объекта содержит диэлектрическую пластину 1, на которой расположена пьезоэлектрическая пластина 2, установленные на ней излучающий встречно-штыревой преобразователь 3 и концевые поглотители 4, 5 ПАВ, подвижный встречно-штыревой преобразователь 6, размещенный над поверхностью пластины 2 на расстоянии, соизмеримом с длиной ПАВ, и предназначенный для соединения жесткой механической связью с контролируемым объектом (на фигурах не показан), и последовательно соединенные неподвижный емкостный токосъемник 7, расположенный над подвижным встречно-штыревым преобразователем 6 ПАВ, первый усилитель 8 и фазометр 9, второй вход которого через второй усилитель 10 соединен с выходом переключателя 11, первый вход которого через линию 12 задержки, а второй вход через аттенюатор 13 соединены с частотомером 14 и генератором 15 регулируемой частоты, и дополнительный неподвижный встречно-штыревой преобразователь 16 ПАВ, расположенный на пластине 2 на фиксированном расстоянии от излучающего встречно-штыревого преобразователя 3.
Способ осуществляется следующим образом.
Настраивают генератор 15 на частоту синхронизма fовстречно-штыревых решеток излучателя и приемника ПАВ, которую измеряют частотомером 14. Электрический сигнал с частотой f1 = fо от генератора 15 (фиг.1) поступает на излучатель 3, посредством которого возбуждает в пластине 2 ПАВ. Электрическое поле, сопровождающее ПАВ и распространяющееся вдоль пластины 2, индицирует переменный сигнал той же частоты f1 во встречно-штыревом преобразователе 6.
Выходной сигнал можно представить в виде
a = Aej(2πf1t+Ψo+Ψz), (1) где А - амплитуда сигнала, зависящая от величины перемещения приемного преобразователя и его расстояния от поверхности пластины;
Ψо - начальная фаза сигнала, зависящая от контролируемых параметров, частотной расстройки и начального положения приемного преобразователя;
Ψz - приращение фазы выходного сигнала, обусловленное перемещением приемного преобразователя вдоль пластины.
При перемещении приемного преобразователя на расстояние Z от излучателя приращение фазы
ΨZ=  Z=
Z=  f1Z= 2Π(k+n), (2) где λ - длина ПАВ на частоте f1;
f1Z= 2Π(k+n), (2) где λ - длина ПАВ на частоте f1;
V - скорость распространения ПАВ;
К - целое число фазовых циклов в 2 π;
n - дробное число последнего фазового цикла.
Выходной сигнал преобразователя 6 передается на емкостный токосъемник 7, с которого через усилитель 8 поступает на один вход фазометра 9. На другой вход фазометра через усилитель 10, переключатель 11, вначале установленный в верхнее положение, и линию 12 задержки поступает опорный сигнал непосредственно от генератора 15. При этом опорный сигнал дополнительно задержан линией 12 относительно принятого с приемного преобразователя 6 сигнала, задержка которого определяется положением его относительно пластины 2.
В зависимости от перемещения Z приемного преобразователя 6 относительно излучающего преобразователя 3 разность фаз сравниваемых сигналов
ΔΨZ= Ψo+  f1Z-2Πf1τ , (3) где τ - дополнительная задержка в цепи опорного сигнала.
f1Z-2Πf1τ , (3) где τ - дополнительная задержка в цепи опорного сигнала.
Фазометром 9 измеряется дробная часть последнего фазового цикла, т.е.
 = 2Πn′=
= 2Πn′= +
+  f1Z-2Πf1τ-2Πk , (4) где Ψ о - начальная фаза сигнала на частоте f1.
f1Z-2Πf1τ-2Πk , (4) где Ψ о - начальная фаза сигнала на частоте f1.
Дополнительную задержку τ выбирают из условия
τ << 1/f1 . (5)
Переключателем 11 исключают дополнительную задержку из опорного сигнала, вводя аттенюатор 13 с затуханием, равным затуханию линии 12 задержки. Так как выполняется условие (5), то целое число k фазовых циклов в соотношении (2) не нарушается. Поэтому фазометром 9 фиксируется вторая разность фаз в пределах одного фазового цикла =2Πn″=
=2Πn″= +
+  f1Z-2Πk . (6)
f1Z-2Πk . (6)
Далее изменяют частоту генератора 15 до значения f2, при котором восстанавливается первоначальная разность фаз принятого и опорного сигналов
 , (7) где Ψo'' - начальная фаза сигнала на частоте f2.
, (7) где Ψo'' - начальная фаза сигнала на частоте f2.
Значение частоты f2 измеряют частотомером 14.
Приравнивая выражения (7) и (4), получают +
+  f1Z-2Πf1τ=
f1Z-2Πf1τ= +
+  f2Z. (8)
f2Z. (8)
Поскольку дополнительная задержка τ << 1/f1, то второе значение частоты f2 мало отличается от первоначального значения частоты f1, т.е.
f1 - f2 << f1 . (9)
С учетом условия (9) можно считать, что Ψo' = Ψo''. Тогда уравнение (8) можно представить в более простом виде: Z-f1τ=
Z-f1τ=  Z (10)
Z (10)
Решив уравнение (10) относительно перемещения Z, получают
Z=  V (11)
V (11)
Таким образом, по двум значениям частоты f1 и f2, дополнительной задержке τ опорного сигнала и скорости V распространения ПАВ в звукопроводе можно определить перемещение объекта Z. Так как результат вычислений не зависит от количества фазовых циклов k (длин ПАВ) в определяемом перемещении, то положение объекта можно контролировать без реверсивного счета количества фазовых циклов от начального положения, т.е. исключается неоднозначность фазовых измерений.
По сравнению с прототипом достигнуто значительное уменьшение диапазона перестройки частоты. Так, по способу-прототипу минимальное изменение частоты при измерении перемещения Z определяется выражением
Δf1= f1-f2=  . (12) где Δ f1 - изменение частоты, вызывающее изменение разности фаз сравниваемых сигналов на 2 π (360о).
. (12) где Δ f1 - изменение частоты, вызывающее изменение разности фаз сравниваемых сигналов на 2 π (360о).
По предлагаемому способу для определения того же значения перемещения Z согласно выражению (11) достаточно изменение частоты:
Δf2=f1-f2=  V . (13)
V . (13)
Уменьшение диапазона перестройки частоты можно оценить коэффициентом сжатия частот
q=  =
=  =
=  . (14) где Δϕ=2πf1τ - дополнительный фазовый сдвиг, вносимый элементом задержки на частоте f1.
. (14) где Δϕ=2πf1τ - дополнительный фазовый сдвиг, вносимый элементом задержки на частоте f1.
Из выражения (14) видно, что чем меньше вводимая в опорный сигнал задержкa τ, а следовательно, и соответствующий фазовый сдвиг Δτ , тем больше коэффициент сжатия q.
Минимальное значение задержки τ определяется возможностью регистрации малых перемещений, т.е. разрешающей способностью используемого фазометра. Современные цифровые фазометры (Ф2-28, Ф2-34 и др.) имеют разрешающую способность на уровне Δϕо = 0,01-0,02о. Если принять, что дополнительный фазовый сдвиг Δϕ = 10 Δϕо, то реальное значение коэффициента сжатия
q=  = 3600....1800
= 3600....1800
Таким образом, по сравнению с прототипом минимальный диапазон изменения частоты за счет новых операций еще уменьшен по крайней мере в 1000 раз, что практически исключает влияние дополнительных фазовых сдвигов в цепи излучатель - приемник из-за частотной расстройки встречно-штыревых возбуждающих и принимающих преобразователей. Приведенный расчет подтверждает правомочность условия (9) и, как следствие, справедливость равенства начальных фаз сигнала Ψ'o=Ψ''o при столь малом изменении частоты ПАВ. Последнее обеспечивает повышение точности определения перемещений. При длине ПАВ λ = 20 мкм разрешающая способность по перемещению с учетом разрешающей способности цифровых фазометров составляет 0,001-0,002 мкм.
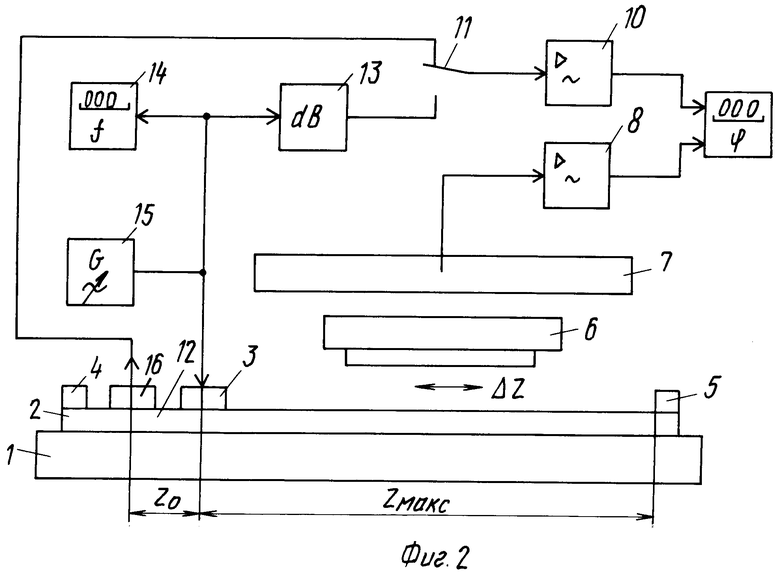
Для исключения влияния внешней среды на скорость распространения ПАВ в звукопроводе в качестве элемента дополнительной задержки используют тот же звукопровод 2 на участке Zo (фиг.2), на котором ПАВ от излучающего преобразователя 3 распространяется в направлении поглотителя 4 и принимается дополнительным неподвижным приемным преобразователем 16. При фиксированном расстоянии Zo = const время задержки ПАВ определяется соотношение
τ = Zo/V. (15)
Подставив значение задержки из выражения (15) в выражение (11), получают
Z=  Zo=
Zo=  , (16)
, (16)
где γ = (f1 - f2)/f1 - относительная частотная расстройка, необходимая для исключения неоднозначности.
Из полученного выражения (16) видно, что измеряемое перемещение Z определяется фиксированным расстоянием Zо, измеряемой частотной расстройкой γ и не зависит от скорости распространения ПАВ в звукопроводе.
Использование изобретения позволяет повысить точность измерения перемещений как за счет максимального сжатия диапазона перестройки частоты ПАВ, так и устранения влияния непостоянства скорости распространения ПАВ от изменения параметров окружающей среды.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ бесконтактного измерения толщины плоских изделий | 1985 |
|
SU1357708A1 |
| Способ определения расстояния | 1990 |
|
SU1755047A1 |
| ФАЗОМЕТР ОПТИЧЕСКОГО ДИАПАЗОНА | 1992 |
|
RU2044263C1 |
| Импульсно-фазовое устройство для контроля толщины | 1990 |
|
SU1747894A1 |
| Способ определения скорости распространения акустических колебаний в средах | 1986 |
|
SU1381343A1 |
| СПОСОБ ИЗМЕРЕНИЯ ОПТИЧЕСКОЙ РАЗНОСТИ ФАЗ | 1990 |
|
RU2028577C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СРЕДНЕГО ЗНАЧЕНИЯ ЛИНЕЙНОЙ СКОРОСТИ | 1991 |
|
RU2014618C1 |
| Ультразвуковой способ определения толщины пленочных изделий | 1988 |
|
SU1535139A1 |
| Способ определения коэффициентов температуропроводности материалов и устройство для его осуществления | 1991 |
|
SU1776350A3 |
| Способ измерения толщины диэлектрических материалов | 1979 |
|
SU901890A1 |
Изобретение относится к измерительной технике и может быть использовано для определения положения объекта, перемещающегося в широком диапазоне значений перемещений. Цель изобретения - повышение точности измерения перемещений объекта путем максимального сжатия диапазона перестройки частоты ультразвуковых колебаний и исключения влияния внешней среды на скорость распространения ультразвуковых колебаний. Это достигается тем, что опорный сигнал на исходной частоте задерживают на малую величину дополнительной задержки и фиксируют разность фаз принятого и опорного сигналов. Исключают дополнительную задержку опорного сигнала и фиксируют вторую разность фаз. Затем изменяют исходную частоту до значения, при котором восстанавливается первоначальная разность фаз принятого и опорного сигналов,а перемещение определяют с учетом частот f1, f2 , выбранной задержки τ и скорости V распространения ПАВ. Для исключения влияния внешней среды на скорость распространения ПАВ задержку опорного сигнала осуществляют путем приема ПАВ, распространяющейся по пьезоэлектрической пластине на фиксированном расстоянии от излучателя, с учетом которого определяют перемещение объекта. 1 з.п. ф-лы, 2 ил.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для измерения линейных перемещений | 1985 |
|
SU1295221A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
