Изобретение относится к области измерения линейных размеров с использованием непрерывных ультразвуковых колебаний и может быть использовано для определения расстояний до различных объектов в системах очувствления роботов, контроля движения внутрицехового транспорта, в медицинских исследованиях и других областях техники.
Ультразвуковые колебания используют для измерения расстояний от единиц миллйметров до десятков метров в воздушной среде, т.е. в том диапазоне, в котором применение радио- и оптических излучений затруднено из-за необходимости измерять очень малые временные интервалы ( - с), что связано с большой скоростью распространения электромагнитных волн. Скорость распространения ультразвуковых колебаний в воздухе около 333 м/с, т.е. на 6 порядков меньше скорости распространения электромагнитных колебаний. Это позволяет использовать ультразвуковые колебания для измерения небольших расстояний.
Известен фазовый способ определения расстояния, заключающийся в измерении фазового сдвига гармонической огибающей ультразвуковых колебаний относительно модулирующего сигнала и определения расстояния по формуле
L
ДФ
2лг
С F
где L - измеренное расстояние;
АФ-фазовый сдвиг огибающей;
С - скорость распространения ультразвуковых колебаний;
F - частота огибающей.
Для исключения неоднозначности фазовых измерений расстояния частоту огибающей выбирают в зависимости от максимального расстояния мах F C/2LMax.
В то же время фазовый сдвиг несущего колебания может достигать весьма больших значений. Так, для L 2 м, частота ультразвуковых колебаний f 60 кГц при С 330 м/с, значение А Фсоставит 2,5-103 рад.
Недостатком способа является невысокая точность определения расстояния, так как погрешность измерения фазового сдвига низкочастотной огибающей АФумножа- ется на отношение частот f/F, которое велико при малой длине волны ультразвуковых колебаний. Малая длина волны обеспечивает хорошую направленность излучения и локализацию энергии колебаний при небольших размерах излучателя и приемника.
Более высокую точность обеспечивают способы измерения расстояния с измерением фазовых сдвигов непосредственно несущих ультразвуковых колебаний. Однако при этом возникает неоднозначность фазовых измерений, которая исключается использованием двух и более частот излучения.
Известен двухчастотный способ измерения расстояния, заключающийся в индикации резонанса амплитудным или фазовым способом, измерении частот акустических резонансов в тракте между излучателем и контролируемым объектом при изменении частоты ультразвуковых колебаний и определении расстояния по формуле
о , С(т -п) 2(fm-fn)
где С - скорость распространения ультразвуковых колебаний;
тип- номера гармоник;
fn и fm - частоты резонанса, Однако этому способу присуща также невысокая точность измерения расстояния из-за относительно большого диапазона перестройки частоты ультразвуковых колебаний. Возникающие при этом фазочастотные искажения в излучателе и приемнике ультразвуковых колебаний, наличие частотной зависимости поглощения среды, распространения этих колебаний и частотные погрешности самого фазометра, используемого для индикации резонанса, вызывают появление дополнительных погрешностей, которые трудно учесть или
скомпенсировать.
Наиболее близким по технической сущности к предлагаемому является двухчастотный способ определения расстояния, заключающийся в возбуждении пьезоэлектрического преобразователя непрерывными электрическими колебаниями на первой частоте fi, излучении ультразвуковых колебаний в направлении контролируемого объекта, приеме отраженных колебаний
пьезоэлектрическим приемником с известной акустической базой по отношению к излучателю, измерении разности фаз между принятыми и излучаемыми колебаниями, изменении частоты колебаний до значения
тк, при котором разность фаз изменится на 2 (К- 1)тги определении расстояния по формуле
К-1
35
2(1+Е) (fi-fK)
где К-1 - изменение количества длин волн ультразвуковых колебаний, укладывающихся между излучателем и приемником при
изменении частоты колебаний от fi до fK;
Е - поправка, зависящая от расстояния между излучателем и приемником (акустической базы) и направленности излучения. Если в процессе изменения частоты количество длин волн изменяется на одну длину волны, то разность фаз изменяется только на 2яи формула приобретает вид
50
I
К-1
2 ( 1 + Е ) ( f 1 - h )
Из последней формулы следует, что минимальный частотный диапазон, в котором необходимо перестраивать частоту колеба- ний, определяется изменением разности фаз на один фазовый цикл равен Afmin
(fl-f2).
Определение расстояния па двум значениям частоты ультразвуковых колебаний
fi и fa, соответствующих изменению разности фаз на 2 я, исключает неоднозначность фазовых измерений при любом соотношении расстояния L и длины А ультразвукового излучения (L/ А 1).
Недостатком известного способа является также невысокая точность определения расстояния из-за необходимости перестройки частоты ультразвуковых колебаний хотя и в минимальном, но достаточно широком диапазоне частот. Так, при определении расстояния L 0,1 м в воздухе (скорость распространения ультразвуковых колебаний G 332 м/с) и первом значении частоты колебаний fi 40 кГц (длина волны А C/fi 332/ (40-103) - 0,0083 м) второе значение частоты при Е 1
332 +0,2 40 103
0,2
следовательно, для исключения неоднозначности измерений разности фаз (2 L А ) частоту возбуждения пьезоэлектрического излучателя необходимо перестроить в диапазон частот от40 до41,66 кГц, т.е. примерно на 4-5%, При меньших расстояниях или меньшей частоте излучения диапазон перестройки частоты еще более возрастет.
Из-за ограниченной широкополосности резонансных пьезоэлектрических преобразователей, которые наиболее эффективны при измерении расстояний, изменение частоты возбуждающих электрических колебаний даже на несколько процентов вызывает появление неконтролируемых фазовых сдвигов в пьезорезонансных поеобразова- телях из-за нелинейности их фазочастотных характеристик. Кроме того, в самом фазометре, которым измеряют разность фаз сравниваемых колебаний, возникают дополнительные фазовые погрешности от неидентичности фазочастотных характеристик преобразовательных каналов фазометра и неравномерности амплитудно-частотных характеристик каналов пьезоэлектрических преобразователей. Расширение полосы пропускания пьезоэлектрических преобразователей неизбежно снижает их энергетические показатели и помехозащищенность от действия шумов и
различных промышленных помех.
Целью изобретения является повышение точности измерения путем максимального сжатия диапазона перестройки частоты ультразвуковых колебаний при со5
0 . 5
0
0
5
л
5
хранении однозначности двухчастотного способа определения расстояния. Кроме того, ставится цель уменьшения влияния непостоянства скорости распространения ультразвуковых колебаний на результат измерения.
Поставленная цель достигается тем, что в известный способ определения расстояния, заключающийся в возбуждении пьезоэлектрического преобразователя непрерывными электрическими колебаниями на частоте резонанса преобразователя, излучении ультразвуковых колебаний в направлении контролируемого объекта, приеме отраженных ультразвуковых колебаний пьезоэлектрическим приемником с известной акустической базой по отношению к излучателю, измерении разности фаз между принятыми и излучаемыми колебаниями, изменении частоты колебаний до получения заданных значений изменения разности фаз сравниваемых колебаний и определении расстояния по формуле, введены новые операции, выполняемые о такой последовательности.
Возбуждаемые ультразвуковые колебаний разделяют на зондирующие, которые облучают контролируемый объект, и опорные, которые непосредственно преобразуют в электрические, сравнивают принятые зондирующие колебания с опорными, измеряют частоту колебаний fi и выполняют ряд последовательных отсчетов разности фаз сравниваемых колебаний на этой частоте, определяют среднее арифметическое значение Др 1 ..среднее квадратическое отклонение результата измерения и максимальную случайную погрешность. Изменяют частоту возбуждающих преобразователь колебаний до значения f2, соответствующего разности фаз Ду + К, где К- заданная величина, определяемая как максимальное значение случайной погрешности величины . Измеряют измененное значение частоты fa колебаний и выполняют ряд последовательных отсчетов разности фаз сравниваемых колебаний на этой частоте. Определяют среднее арифметическое значение результата измерения. Расстояние L определяют по формуле
. 1 Уг Ада -Др1 1
2п
(
f2-fl
)J2-s2
где S - акустическая база излучателя и приемника.,
Уменьшение влияния непостоянства скорости распространения ультразвуковых
колебаний С достигается введением дополнительных операций, выполняемых в такой последовательности.
На пути распространения ультразвуковых колебаний устанавливают отражатель на расстоянии, равном акустической базе излучателя и приемника. Дополнительно изменяют частоту возбуждающих преобразователь колебаний до значения fa, выбранного из условия Ь fi, осуществляют несколько последовательных измерений разности фаз Ада. Определяют среднее арифметическое значение Ада результата измерения. Вычисляют максимальное значение N случайной погрешности величины по результатам нескольких измерений. Вновь изменяют частоту возбуждающих преобразователь колебаний до значения f, соответствующего разности фаз + N и измеряют это значение частоты.
Осуществляют несколько последова- тельных измерений разности фаз . Определяют среднее арифметическое значение результата измерения. Вычисляют значение скорости С по формуле
с (f4-f3) - Дуэз
Используют полученное значение скорости С при определении искомого расстояния.
Способ определения расстояний осуществляют следующим образом.
Возбуждают пьезоэлектрический преобразователь непрерывными электрическими колебаниями на частоте резонанса fi, совпадающей с резонансной ча.стотой этого преобразователя. Ультразвуковые колебания разделяют на зондирующими опорные. Зондирующие колебания направляют на контролируемый объект, расстояние до которого определяют. Принимают отраженные от объекта зондирующие колебания приемником, разнесенным с излучателем на известное базовое расстояние S. Принятые зондирующие колебания преобразуют в электрические колебания. Аналогично опорные ультразвуковые колебания преобразуют в электрические колебания.
Ультразвуковые колебания при разнесенном излучении и приеме проходят путь
D 2k2 + (S/2f,(1)
на котором испытывают фазовую задержку
А 2VL2+(S/2)2 &1-с
где С - скорость распространения ультразвуковых колебаний в воздухе.
Сравнивают фазу зондирующих колебаний, отраженных от объекта с опорными и
измеряют разность фаз этих колебаний. Фаза зондирующих колебаний с учетом фазовых задержек в пьезоэлектрических преобразователях определяется выражением
ф,, ( (3/2У +tl+rz).
(3) -
где т - время задержки в пьезоэлектрическом излучателе в процессе преобразования электрических колебаний в механические;
TZ - время задержки в пьезоэлектрическом приемнике в процессе преобразования механических колебаний в электрические.
Фаза опорных колебаний, получаемых непосредственно из излучаемых ультразвуковых колебаний
Фг (ri +т3),
(4)
тз - время задержки в процессе обрат- ного преобразования механических колебаний излучателя в электрические.
Разность фаз сравниваемых электрических колебаний с учетом выражений (3) и (4) имеет вид
&1 Ф1-Ф2 2л:т1х
40
(aVL + (My )
2тг(Ы +ai),
(5)
5
где N - целое число фазовых сдвигов в 2л; а -дробная часть последнего фазового
цикла.
Измеряют частоту колебаний fi частотомером.
Выполняют п последовательных отсчетов дробной части разности фаз (5) с по- и мощью фазометра. Определяют среднее арифметическое результата измерения
1 п
- 5) Дад, п | 1
(6)
где п - число результатов измерений.
Вычисляют случайные отклонения результата измерения
(5 Др|-Д.(7)
Находят оценку среднеквадратического отклонения (СКО) результата измерения
Др1.
c L i Arf. n(n-1 ,
ДФг 2nh(lAJZjSZzJL + Тз).
2л:(Ы+а2),(13)
Учитывая, что в выражениях (5) и (13) 5 одинаковое число целых фазовых циклов N, имеем разность двух разностей фаз на близких частотах
ДФ2 -ДФ1 Др2 2я (f2 -fi )х
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ бесконтактного измерения толщины плоских изделий | 1985 |
|
SU1357708A1 |
| АКУСТОЭЛЕКТРОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПЕРЕМЕЩЕНИЙ ОБЪЕКТА | 1990 |
|
RU2016406C1 |
| Импульсно-фазовое устройство для контроля толщины | 1990 |
|
SU1747894A1 |
| Способ обнаружения неоднородностей в массиве | 1989 |
|
SU1714126A1 |
| Способ определения температуры | 1989 |
|
SU1651114A1 |
| Способ определения скорости распространения акустических колебаний в средах | 1986 |
|
SU1381343A1 |
| Цифровой ультразвуковой измеритель параметров вибрации | 2023 |
|
RU2807421C1 |
| УЛЬТРАЗВУКОВОЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕХАНИЧЕСКИХ НАПРЯЖЕНИЙ В РЕЛЬСАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2723146C1 |
| Способ бесконтактного измерения толщины | 1986 |
|
SU1523916A1 |
| СПОСОБ И УСТРОЙСТВО АКУСТИЧЕСКОГО ИЗМЕРЕНИЯ РАСХОДА ГАЗА | 2010 |
|
RU2453815C2 |
Изобретение относится к технике измерения линейных размеров с использованием непрерывных ультразвуковых (УЗ) колебаний. Целью изобретения является повышение точности измерения путем максимального сжатия диапазона перестройки частоты УЗ-колебаний при сохранении однозначности двухчастотного способа определения расстояния. Электроакустические преобразователи устанавливают на фиксированном расстоянии один от другого. Возбуждают излучающий преобразователь на частоте резонанса f|. Принимают УЗ-коле- бания как непосредственно излучающего преобразователя, используя их после преобразования в электрический сигнал в качестве опорного сигнала, так и отраженные объектом. Выполняют несколько последовательных измерений разности фаз электрического сигнала на выходе приемного преобразователя и опорного сигнала. Изме- няют частоту излучения до значения f2, соответствующего разности фаз большей величины, определяемой на основании полученных значений . Измеряют значение h и выполняют несколько последовательных измерений разности фаз Др2. Искомое расстояние определяют по измеренным значениям , Д02, f2 с учетом заданных значений fi, скорости распространения УЗ- колебаний в среде между объектом и преоб- разователями и расстоянием между излучающим и приемным преобразователями. 1 з.п. ф-лы, 1 ил. I (Л С а ел g VI
Максимальное значение случайной погрешности находят из выражения
5 рта - t ,
где t - коэффициент Стьюдента, зависящий от доверительной вероятностир и числа измерений h.
Изменяют частоту колебаний до тех пор, пока изменение разности фаз не превысит первоначальное значение разности
фаз на величину
Др2 Р t (fy.
коэффициент превышения приращения разности фаз над максимальной случайной погрешностью;
Дда - отсчет измененного значения разности фаз в результате изменения частоты колебаний.
Измеряют измененное значение частоты h частотомером и выполняют п последовательных отсчетов разности фаз. Определяют среднее арифметическое результата измерения
--I П
Д Affci.
1 1
где - результаты отсчетов разности фаз при частоте колебаний fa.
При выполнении условия (10) измене- кие разности фаз в результате перестройки частоты колебаний многим меньше одного фазового цикла
Др2 -Др1 pt(Xp 2n.
Поэтому разность фаз зондирующих И опорных колебаний при втором значении частоты h принимает вид
10
(2irL2 + (s/ay +Г2.гз)(14)
Если излучатель и приемник иэготовле15 ны из одного материала и имеют одинаковые ра змеры, то их задержки прямого и обратного преобразований практически одинаковы (). Для формирования опорных электрических колебаний непос20 редственно из излучаемых ультразвуковых колебаний можно использовать третий электрически изолированный электрод на излучающем пьезоэлектрическом преобразователе, который будет преобразовывать
25 механические ультразвуковые колебания в электрические. В этом случае обратное преобразование на излучающем и приемных пьезоэлектрических преобразователях происходит с одинаковой задержкой
30 ( ). Поэтому разность двух разностей фаз (14) с учетбм неравенства (10) имеет вид
35
23r(f2(0((S/2) .
Др2 - .
(15)
40 Из полученного выражения (15) расстояние до объекта определяется по формуле
(11)
I 1 v7 Д#г-Ду 1 с С ч ,2 с-2 45 2 L 2л: f2-fi П Ъ
(16)
Для оценки степени сжатия диапазона перестройки частоты колебаний, возбужда50 ющих пьезоэлектрические преобразователи, в предложенном способе по сравнению с прототипом определим разность частот при измерении одного и того же расстояния. По прототипу разность частот f г и f 1 опре55 деляется изменением разности фаз на один фазовый цикл в 2я
L 2 (
сг
(
По предлагаемому способу разность частот f2-fi определяется формулой (16). Приравняв выражения (17) и (16), получим отношение разностей частот
i/
f2 - f 1 1 2л
fa - f 1 Е t
(18)
где / - коэффициент сжатия диапазона перестройки частоты электрических колебаний.
Таким образом, за счет сжатия диапазона перестройки частоты колебаний существенно снижается влияние фазочастотных искажений в пьезоэлектрических преобразователях и каналах электронного фазометра. Возможность перестройки частоты колебаний в узком диапазоне частот позволяет использовать для измерения расстояний более эффективные и мощные резонансные пьезоэлектрические преобразователи и избирательные усилия, что повышает точность и помехозащищенность измерений.
Дальнейшее повышение точности достигается исключением влияния непостоянства скорости распространения ультразвуковых колебаний. Для этого на пути распространения ультразвуковых колебаний устанавливают отражатель на расстоянии, равном расстоянию между излучателем и приемником, т.е. на величину акустической базь S.
Устанавливают частоту колебаний fs «fi и выполняют п последовательных отсчетов разности фаз сравниваемых колебаний. Определяют среднее арифметическое результата измерения
2 AP3i n j 1
(19)
Затем изменяют частоты колебаний до значения fy, при котором удовлетворяется условие (10) для измененной разности фаз
Ap4-Ap3./hoip.
(20)
Измеряют частоту f4 и выполняют вновь п последовательных отсчетов разности фаз
Ду34. Определяют среднее арифметическое результата измерений
Ј Др41(21)
п | 1
Определяют расстояние до отражателя по формуле (16) с учетом но зых значений разности фаз и частот колебаний
с 1 Уг Дум Ь Т 2д
(
)f-s2
(22)
Из выражения (22) определяем значение скорости распространения ультразвуковых колебаний
10
(f4-f3) Ду 4 -Д0
(23)
Полученное значение скорости С используют для определения расстояния до объекта по выражению (16).
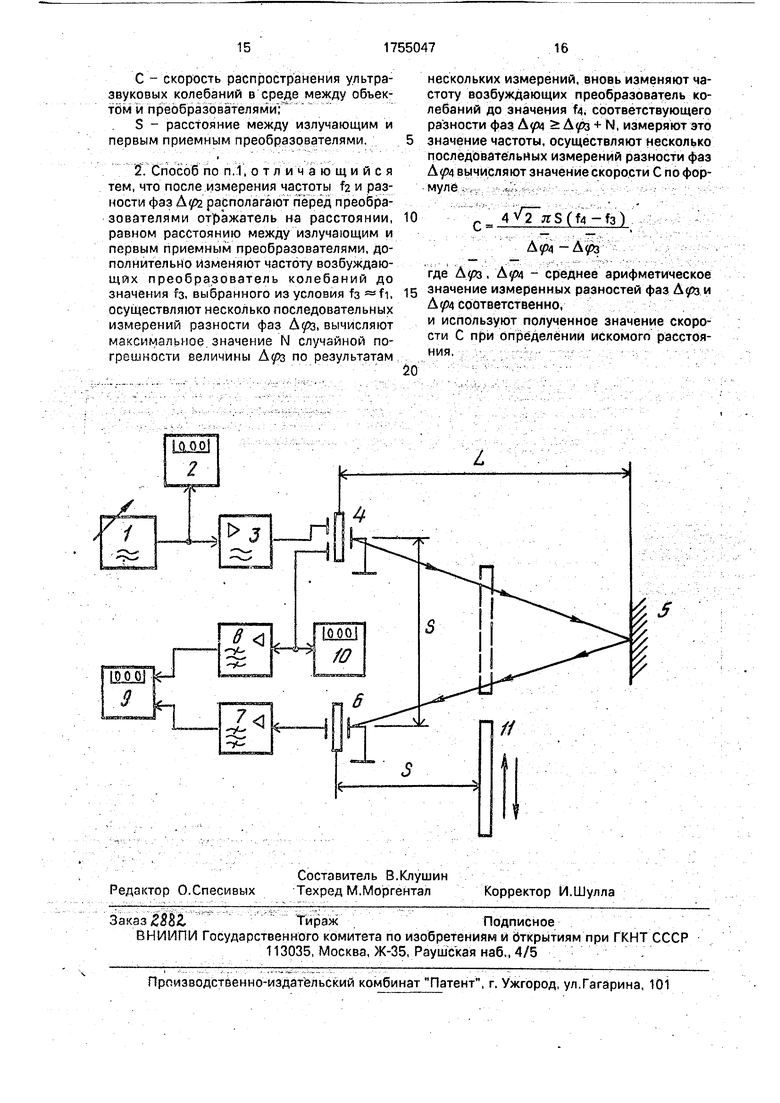
На чертеже приведен пример реализации предлагаемого способа с помощью ультразвукового устройства.
Устройство содержит генератор 1 перестраиваемых по частоте электрических колебаний, цифровой частотомер 2, усилитель 3 мощности, трехэлектродный пьезоэлектрический излучатель 4, контролируемый
объект 5, пьезоэлектрический приемник 6, избирательные усилители 7 и 8, цифровой фазометр 9, вольтметр 10 и подвижный отражатель 11.
Электрические колебания с выхода генератора 1 поступают на усилитель 3, где усиливаются по мощности. Электрические колебания с помощью пьезоэлектрического преобразователя 4 преобразуются в ультразвуковые и одновременно с помощью третьего электрода (пьезоэлектрического трансформатора) преобразуются в электрические опорные колебания. Ультразвуковые зондирующие колебания отражаются от контролируемого объекта 5 и принимаются
пьезоэлектрическим преобразователем 6, расположенным относительно излучателя 4 на расстоянии S (акустическая база). Принятые ультразвуковые колебания преобразуются приемником 6 в электрические,
которые усиливаются избирательным усилителем 7. Опорные колебания усиливаются аналогичным избирательным усилителем 8. Разность фаз усиленных колебаний измеряется цифровым фазометром 9.
Вначале частоту генератора 1 регулируют в пределах полосы пропускания пьезоэлектрических преобразователей 4 и 6 до достижения резонанса, что фиксируется по
максимальному показанию вольтметра 10. Измеряют частоту колебаний fi по частотомеру 2 и выполняют п отсчетов разности фаз сравниваемых колебаний цифровым фазометром 9. Определяют среднее арифметическое результата измерения разности фаз
максимальную случайную погрешность измерений.
Изменяют частоту колебаний генерато- ра 1 до тех пор, пока изменение разности фаз по фазометру 9 не превысит первоначальную разность фаз на выбранную из условия (10) величину. Измеряют установленное значение частоты h частотомером 2 и по результатам отсчетов по фазометру 9 определяют среднее арифметическое результата измерения разности фаз Д02. По
результатам измерения fi, f2, и on- ределяют по формуле (16) расстояние до объекта 5.
Для определения фактического значения скорости распространения ультразвуковых колебаний в воздухе вводят на пути излучения отражатель 11. Частоту генерато- ра 1 регулируют до значения fa f4 с помощью частотомера 2. Затем по отсчетам разности фаз по фазометру 9 определяют
среднее арифметическое значение резуль
тата измерения разности фаз . Далее из условия (10) устанавливают новое значение частоты f4, которое измеряют частотомером 2, Выполняют п отсчетов разности фаз по фазометру 9 и определяют среднее арифме-
тическое значение разности фаз Дум. С учетом измеренных значений fa, f4, Дуэз и
-
определяют фактическое значение скорости С по формуле (23).
Современные цифровые фазометры, например фазометр Ф2-34, имеют среднеквадратичную погрешность не более 0,01-0,05° (fy - рад). При количе- стве отсчетов измеряемой разности фаз п 8-10 и вероятности Р 0,95 коэффициент Стьюдента t 2,4-2,3. Коэффициент превышения /3 для уменьшения влияния случай- ных погрешностей измерения на конечный результат целесообразно выбирать в пределах fi 5-10. Тогда для случая / 8, t 2,4 и Otp рад имеем коэффициент сжатия из соотношения (18)
1л
8 2,4 10
- з
Для измеряемого расстояния L 0,1 м, С 332 м/с и fi 40 кГц частоту колебаний надо перестраивать не на 1660 Гц, что необходимо в прототипе, а только на 16,6 Гц. Полученный результат подтверждает возg
°
-
5
0
5
(. 5 0
5
можность использования резонансных пьезоэлектрических преобразователей и избирательных усилителей для измерения расстояний до отражающих объектов с повышенной точностью.
Использование предложенного способа определения расстояний до неподвижных объектов в робототехнологических комплексах обеспечивает по сравнению с существующими способами повышение точности определения положения деталей и узлов в условиях действия промышленных помех за счет использования узкополосных излучателей и приемников и избирательных усилителей. Автоматизация обработки результатов промежуточных измерений может быть выполнена с помощью выпускаемых промышленностью микропроцессорных частотомеров и фазометров.
Формула изобретения 1. Способ определения расстояния до объекта, заключающийся в том, что устанавливают электроакустические преобразователи на фиксированном расстоянии один от другого, возбуждают излучающий преобразователь непрерывными электрическими колебаниями частотой ft, соответствующей частоте резонанса этого преобразователя, принимают приемным преобразователем отраженные объектом ультразвуковые колебания, измеряют разность фаз электрического сигнала на выходе приемного преобразователя и опорного сигнала, изменяют частоту возбуждающих преобразователь колебаний до значения fa, соответствующего разности фаз + К , где К - заданная величина, измеряют это значение частоты и разность фаз Ада, и с помощью измеренных параметров определяют искомое расстояние, о т - личающийся тем, что, с целью повышения точности измерений, дополнительно принимают колебания излучающего преобразователя, преобразуют их в электрический сигнал и используют его в качестве опорного сигнала, на каждой из частот fi и f2 выполняют несколько последовательных измерений разности фаз, величину К определяют как максимальное значение случайной погрешности величины Др1,рассчитанное по результатам нескольких измерений, а искомое расстояние L определяют по формуле
( С чл2 Ј2
21 2я 42-fi Л Ь
где Д$01 , Д#2 - среднее арифметическое значение измеренных разностей фаз и Д pi соответственно;
С - скорость распространения ультразвуковых колебаний в среде между объектом и преобразователями;
S - расстояние между излучающим и первым приемным преобразователями.
нескольких измерений, вновь изменяют частоту возбуждающих преобразователь колебаний до значения fy, соответствующего разности фаз Дух 5: Д0 + N, измеряют это значение частоты, осуществляют несколько последовательных измерений разности фаз вычисляют значение скорости С по формуле
10
4 S (f4 - fa)
- Д03
где , - среднее арифметическое jg значение измеренных разностей фаз Ддо и Д 4 соответственно,
и используют полученное значение скорости С при определений искомого расстояния. ;; ;;-.. - - ;-: :-:- - -.;/ ... - .- : - . . : :
.-- : ; - :-
| Горбатов А.А., Рудашевский Г.Б | |||
| Акустические методы измерения расстояний и управления, М.: Энергоиздат, 1981, с | |||
| Способ крашения тканей | 1922 |
|
SU62A1 |
| Приборы для неразрушающего контроля материалов и изделий | |||
| Справочник | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Под ред | |||
| В.В | |||
| Клюева | |||
| М.: Машиностроение, 1986, с | |||
| ТЕЛЕФОННЫЙ АППАРАТ, ОТЗЫВАЮЩИЙСЯ ТОЛЬКО НА ВХОДЯЩИЕ ТОКИ | 1920 |
|
SU273A1 |
| Бражников Н.И | |||
| Ультразвуковая фазо- метрия | |||
| М.: Энергия, 1968, с | |||
| Деревянный коленчатый рычаг | 1919 |
|
SU150A1 |
