Изобретение относится к измерительной технике, в частности к информационным измерительным системам для измерения различных физических величин электрическими методами.
Известен дифференциальный индуктивный датчик перемещений, содержащий два неподвижных сердечника броневого типа с обмотками и подвижный якорь, расположенный в воздушном зазоре между сердечниками. Якорь выполнен в виде слоистого ферромагнитного диска, с обеих сторон которого размещены немагнитные накладки из металла с высокой электропроводностью, создающие токовихревой эффект при питании датчика током высокой частоты [1].
Однако из-за нелинейности выходной характеристики известный датчик имеет ограниченный диапазон измеряемых перемещений.
Наиболее близким по технической сущности к изобретению является дифференциальный индуктивный датчик перемещений, содержащий два соосно установленных неподвижных ферромагнитных сердечника с кольцевыми полостями, размещенные на соответствующих сердечниках две обмотки, ферромагнитный якорь, выполненный в виде полого цилиндра, установленного с возможностью линейного перемещения в кольцевых полостях обеих сердечников, и присоединенный к нему шток, предназначенный для связи с объектом контроля [2].
Известный датчик не позволяет осуществлять одновременное измерение линейных перемещений двух независимых объектов. Кроме того, он обладает недостаточной чувствительностью.
Целью изобретения является расширение функциональных возможностей дифференциального индуктивного датчика перемещений за счет измерения линейных перемещений и второго соосно расположенного объекта контроля, а также повышение чувствительности.
Это достигается тем, что предлагаемый дифференциальный индуктивный датчик перемещений дополнительно снабжен двумя дополнительными обмотками с таким же числом витков, что и у первых двух обмоток, вторым ферромагнитным якорем и присоединенным к нему дополнительным штоком, предназначенным для связи со вторым объектом, на противоположных торцах обоих ферромагнитных сердечников выполнены идентичные первым двум кольцевые полости, в каждой из которых размещена соответствующая дополнительная обмотка, второй якорь выполнен в виде двух соосных полых цилиндров, соединенных между собой посредством дополнительного штока, установленного коаксиально внутри первого штока, который выполнен полым, а все обмотки соединены между собой в мостовую измерительную схему.
Кроме того, на обоих якорях могут быть выполнены внутренние и наружные бурты с одинаковыми диаметральными размерами, равными внутреннему и наружному диаметрам неподвижных сердечников.
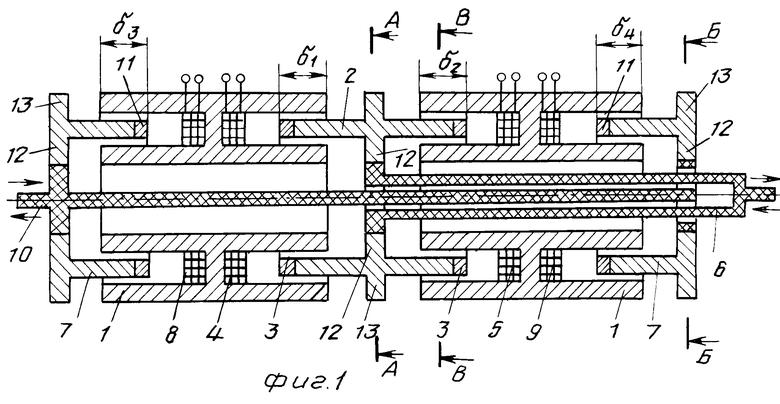
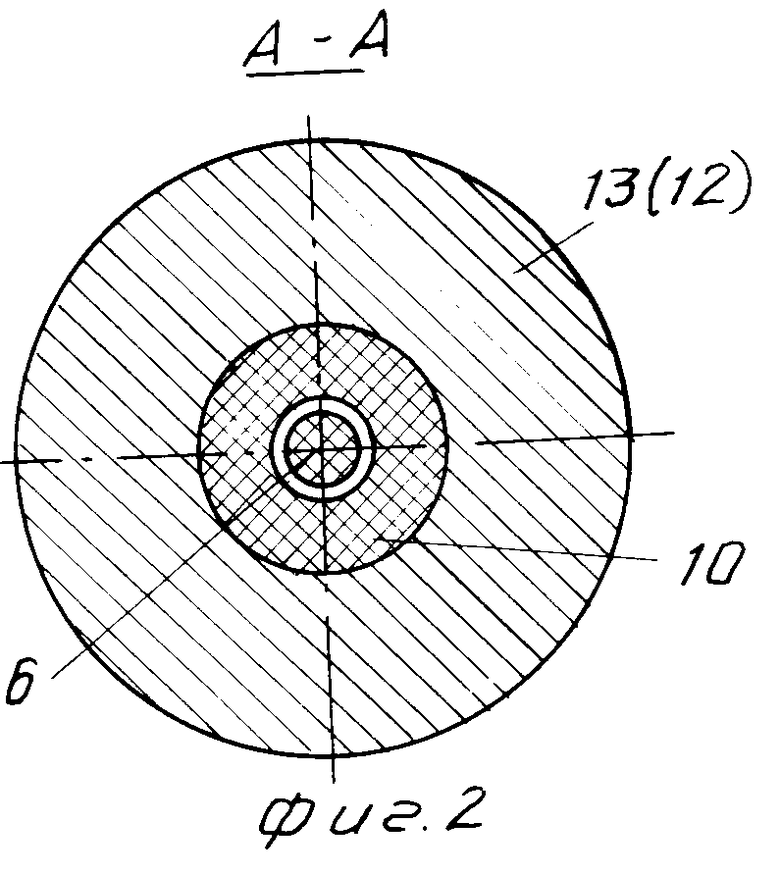
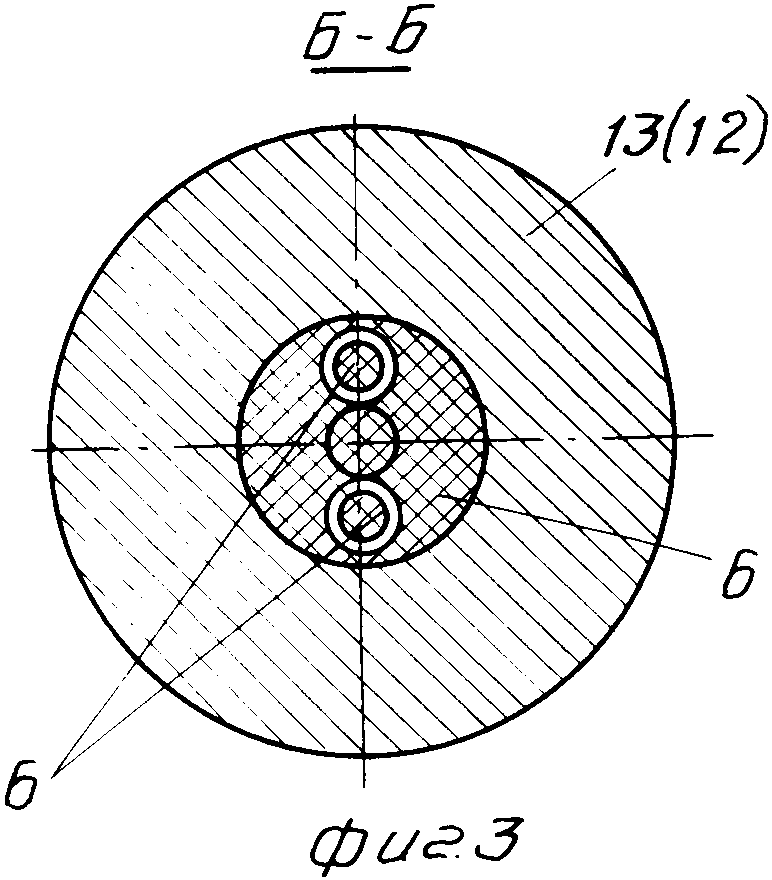
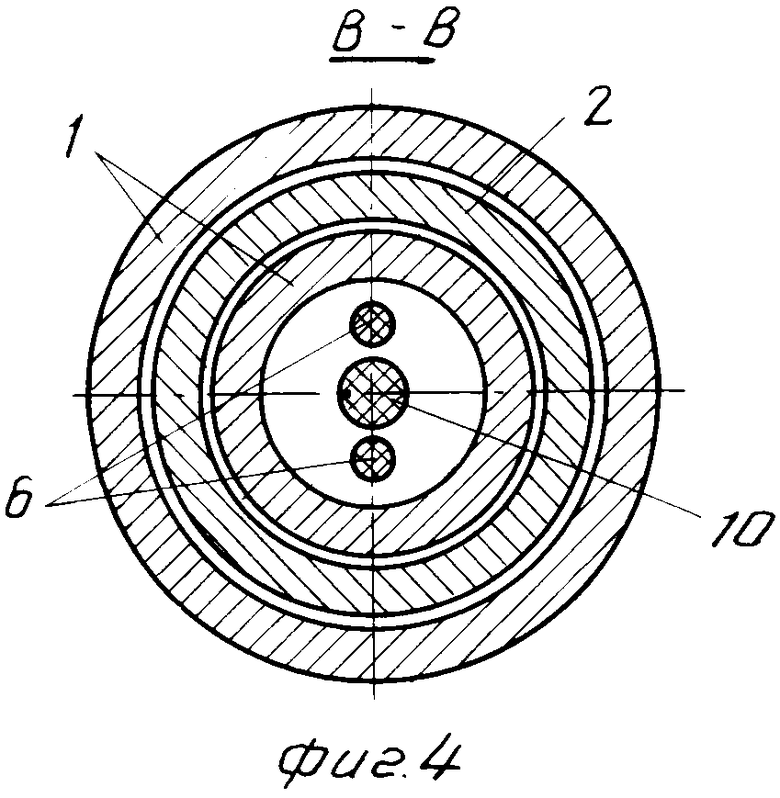
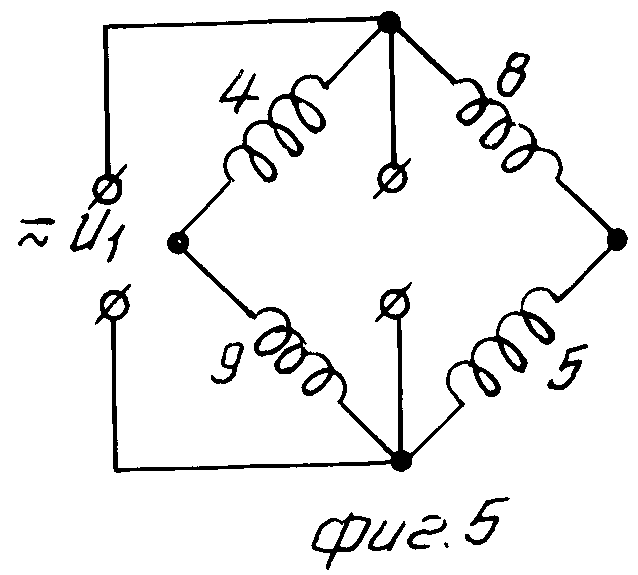
На фиг. 1 изображена конструктивная схема дифференциального индуктивного датчика перемещений; на фиг. 2 - 4 - разрезы А-А, Б-Б, В-В на фиг. 1 соответственно; на фиг. 5 - схема соединений обмоток датчика.
Дифференциальный индуктивный датчик перемещений содержит два неподвижных ферромагнитных сердечника 1 броневого типа и подвижный якорь 2 в виде полого ферромагнитного цилиндра, на торцах которого укреплены немагнитные кольцеобразные накладки 3 из металла с высокой электрической проводимостью для создания токовихревого эффекта. На сердечниках расположены две обмотки 4 и 5 с одинаковым числом витков. Якорь 2 жестко скреплен со штоком 6, который связан с объектом контроля и может перемещаться в осевом направлении в обе стороны. С целью упрощения чертежа шток 6 показан выполненным из двух стержней, но количество их может быть и больше, например три.
Датчик имеет дополнительный подвижный якорь, выполненный в виде двух полых цилиндров 7 и две дополнительные обмотки 8 и 9. Якорь 7 и обмотки 8 и 9 размещены в дополнительных кольцевых полостях, выполненных в ферромагнитных сердечниках 1 со стороны, противоположной основным кольцевым полостям. Полые цилиндры (якорь) 7 жестко скреплены с дополнительным штоком 10 и на их внутренних торцах укреплены немагнитные кольцеобразные накладки 11. Дополнительный шток 10 коаксиально установлен внутри основного штока 6 и связан со вторым объектом измерения.
Основной 2 и дополнительный 7 подвижные якори снабжены каждый внутренним 12 и наружным 13 буртами, диаметральные размеры которых равны диаметральным размерам неподвижных ферромагнитных сердечников. Такое выполнение якорей 2 и 7 повышает интенсивность изменения индуктивного сопротивления обмоток 4, 5 и 8,9 и тем самым повышает чувствительность датчика.
Основные 4 и 5 и дополнительные 8 и 9 обмотки соединены по мостовой схеме.
Дифференциальный индуктивный датчик перемещений работает следующим образом.
При отклонении якоря 2 от нейтрального положения и перемещении его в полостях между внутренними и внешними цилиндрическими частями неподвижных сердечников 1 дифференциально изменяются площади воздушных зазоров за счет изменения осевых размеров зазоров δ1и δ2. Это приводит к изменению индуктивного сопротивления обмоток 4 и 5, являющихся плечами мостовой схемы. Равновесие моста нарушается и на его выходе появляется сигнал, пропорциональный линейному перемещению штока 6 и связанного с ним объекта измерения.
Одновременно при аналогичном отклонении от нейтрального положения дополнительного якоря 7 дифференциально изменяются осевые размеры зазоров δ3 и δ4, что приводит к изменению индуктивного сопротивления обмоток 8 и 9 и, как следствие, к разбалансу мостовой схемы и появлению на выходе сигнала, пропорционального линейному перемещению второго объекта. В итоге, результирующий сигнал будет равен алгебраической сумме перемещений двух контролируемых объектов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНДУКТИВНЫЙ ДАТЧИК ПЕРЕМЕЩЕНИЙ | 2008 |
|
RU2367902C1 |
| ИНДУКТИВНО-ТРАНСФОРМАТОРНЫЙ ДАТЧИК | 1997 |
|
RU2138011C1 |
| ДАТЧИК ПЕРЕМЕЩЕНИЙ ТРАНСФОРМАТОРНОГО ТИПА | 1991 |
|
RU2031358C1 |
| МАГНИТОМОДУЛЯЦИОННЫЙ ИНДУКТИВНЫЙ ДАТЧИК ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1991 |
|
RU2023235C1 |
| Трансформаторный датчик угла поворота двух объектов | 1991 |
|
SU1810747A1 |
| Датчик перемещений | 1981 |
|
SU1012301A1 |
| ДАТЧИК ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1997 |
|
RU2138774C1 |
| ХРАПОВАЯ МУФТА СВОБОДНОГО ХОДА | 1992 |
|
RU2062919C1 |
| ТРАНСФОРМАТОРНЫЙ ДАТЧИК УГЛА ПОВОРОТА ВАЛА | 1997 |
|
RU2145053C1 |
| ДАТЧИК ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1996 |
|
RU2096740C1 |
Изобретение относится к измерительной технике и имеет целью повышение чувствительности и расширение функциональных возможностей индуктивного датчика линейных перемещений путем одновременного измерения перемещений другого соосно расположенного объекта. Датчик содержит два неподвижных ферромагнитных сердечника 1, два подвижных якоря 2 и 6 и две пары индуктивных обмоток 4 и 7, соединенных по мостовой схеме. Подвижные якори 2 и 6 выполнены в виде полых ферромагнитных цилиндров, на торцах которых укреплены немагнитные кольцеобразные накладки соответственно 3 и 9 для создания токовихревого эффекта. Якори 2 и 7 датчика снабжены расположенными посередине внутренним 12 и наружным 13 буртами с такими же диаметральными размерами, что и у неподвижных ферромагнитных сердечников. При смещении какого - либо из якорей 2 и 6 от их нейтрального положения нарушается равновесие моста, созданного двумя парами обмоток 4 и 7, вследствие изменения их индуктивного сопротивления. В результате на выходе мостовой схемы появляется сигнал, пропорциональный алгебраической сумме перемещений двух контролируемых объектов. 1 з.п. ф-лы, 5 ил.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ ИНДУКТИВНЫЙ ДАТЧИК ПЕРЕМЕЩЕНИЙ | 1972 |
|
SU428428A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
