Изобретение относится к измерительным устройствам, основанным на использовании электрических и магнитных средств, в частности к информационным измерительным системам для измерения различных физических величин электрическими методами, например деформации, силы, давления, веса и др., с точностью не более 0,1% от измеряемой величины.
Известны следующие типы датчиков для измерения перемещения: емкостные, тензорезисторные, индуктивные и др. Индуктивные датчики перемещений по сравнению с тензорезисторными и емкостными имеют следующие преимущества:
- отсутствие эффекта старения;
- отсутствие влияния давления и влажности окружающей среды на точность измерений;
- широкий диапазон измеряемых перемещений.
Перемещение отдельных элементов индуктивных датчиков, вызванное воздействием на них различных сил, ведет к изменению индуктивности, которое преобразуется в информационный сигнал. В индуктивных датчиках изменение индуктивности за счет перемещения может происходить путем растяжения или сжатия витков катушки, путем перемещения внутри катушки или рядом с ней сердечника из ферромагнитного или диамагнитного материала, изменением ширины щели в замкнутом ферромагнитном сердечнике катушки или изменением взаимной индуктивности двух катушек, включенных параллельно или последовательно.
Однако, датчики, содержащие ферромагнитные элементы, имеют ощутимую температурную зависимость индуктивности, что снижает точность измерений.
Известен дифференциальный индуктивный датчик перемещений (RU 2017059 С1, 5 G01B 7/00, 30.07.1994) [1], который содержит два неподвижных ферромагнитных сердечника, два подвижных якоря и две пары индуктивных обмоток, соединенных по мостовой схеме. Подвижные якори выполнены в виде полых ферромагнитных цилиндров, на торцах которых укреплены немагнитные кольцеобразные накладки для создания токовихревого эффекта. Основной якорь жестко связан со штоком, который связан с объектом контроля, и перемещается в осевом направлении. Имеется еще один дополнительный якорь и две одинаковые обмотки, которые размещены в дополнительных кольцевых полостях, выполненных в ферромагнитных сердечниках. Этот якорь жестко скреплен с дополнительным штоком, который коаксиально установлен внутри основного штока и связан со вторым объектом измерения. Основной и дополнительный якоря датчика снабжены расположенными посередине буртами с такими же диаметральными размерами, что и у неподвижных ферромагнитных сердечников, такая конструкция повышает чувствительность датчика. При отклонении основного якоря от нейтрального положения и перемещении его в полостях между внутренними и внешними цилиндрическими частями неподвижных сердечников изменяются площади воздушных зазоров. Это приводит к изменению индуктивного сопротивления обмоток, являющихся плечами мостовой схемы. Равновесие моста нарушается и на его выходе появляется сигнал, пропорциональный линейному перемещению штока и связанного с ним объекта измерения. Одновременно отклонение от нейтрального положения дополнительного якоря приводит к изменению индуктивного сопротивления дополнительных обмоток и, как следствие, к разбалансу мостовой схемы и появлению на выходе сигнала, пропорционального линейному перемещению второго объекта. В итоге, результирующий сигнал будет равен алгебраической сумме перемещений двух контролируемых объектов.
С использованием этого датчика возможно измерять линейные перемещения двух объектов, однако он имеет сложную конструкцию, а наличие ферромагнитных элементов повышает температурную зависимость индуктивности.
Известен магнитомодуляционный индуктивный датчик перемещений (RU 2023235 С1, 5 G01B 7/00, 15.11.1994) [2], который содержит магнитопровод, выполненный в виде П-образных зигзагов, имеющий три боковых участка, с расположенными на них неподвижными обмотками индуктивности, которые включены в мостовую схему измерения переменного тока, в которую также включена дополнительная постоянная индуктивность; и две подвижные обмотки подмагничивания, подключенные к источнику со стабильным постоянным током, установленные на параллельных участках зигзагообразного магнитопровода, с возможностью линейного перемещения вдоль них, и предназначенные для связи с двумя объектами контроля. При среднем положении подвижных обмоток мостовая схема сбалансирована, при перемещении одной из обмоток, например, влево, в левой части магнитная индукция увеличивается, а в правой - уменьшается, это приводит к разбалансировке мостовой схемы, таким образом, с изменением координаты подвижной обмотки пропорционально изменяется напряжение на выходе мостовой схемы датчика. Аналогично при перемещении второй подвижной обмотки в ту или другую сторону от нейтральной линии магнитопровода датчика напряжение на выходе мостовой схемы также изменяется пропорционально величине перемещения. При одновременном перемещении обеих подвижных обмоток снимаемое с выходных зажимов датчика напряжение, также как и в указанном выше аналоге, пропорционально алгебраической сумме линейных перемещений двух объектов.
Известный датчик предназначен для измерений больших перемещений, определяемых размерами магнитопровода, и имеет низкую чувствительность при малых перемещениях.
Наиболее близким по технической сущности к заявляемому изобретению является индуктивный датчик перемещения (RU 2221988 С1, 5 G01B 7/00, 20.01.2004) [3], принимаемый за прототип, содержащий в одном из вариантов выполнения две индуктивности, устанавливаемые на взаимно перемещаемых объектах, генератор переменного напряжения, конденсатор, два диода и два сердечника, выполняемые соизмеримыми по величине с индуктивностями, один из которых снабжен тягой из неметаллического неферромагнитного материала, закрепленной на сердечнике со стороны второй индуктивности, а второй выполнен с продольным сквозным отверстием для прохода тяги, индуктивности выполнены в виде катушек, диоды и индуктивности образуют мостовую схему, в плече которой один из диодов соединен последовательно с одной из индуктивностей. Одна точка соединения плеч подключена к первому выводу генератора, а другая точка соединения плеч - к конденсатору, второй вывод которого соединен со вторым выводом генератора. Выводы конденсатора являются выходом устройства, к которому подключается измеритель напряжения постоянного тока. В исходном состоянии сердечники установлены в катушках так, что постоянное напряжение на выходе устройства равно нулю. При перемещении объектов относительно друг друга сердечники смещаются вдоль оси катушек, их индуктивности изменяются, это вызывает разбалансировку мостовой схемы и, как следствие, на выходе устройства появляется постоянное напряжение соответствующей полярности, пропорциональное величине перемещения объектов.
Недостатками устройства-прототипа являются:
- заметное изменение индуктивности происходит при перемещениях сердечника, сравнимых с длиной катушки индуктивности, что приводит к уменьшению чувствительности при малых перемещениях и, следовательно, к снижению точности измерений;
- возможность касания сердечника с катушкой приводит к возникновению погрешности измерений, обусловленной трением;
- температурная зависимость магнитной проницаемости ферромагнитного сердечника и нелинейность вольтамперной характеристики диодов приводит к снижению точности измерений.
Задачей, решаемой настоящим изобретением, является повышение точности измерения малых перемещений объекта за счет исключения использования ферромагнитного материала и диодов, имеющих нелинейную вольтамперную характеристику.
Указанный технический результат достигается тем, что индуктивный датчик перемещений содержит две индуктивности, установленные на взаимно перемещаемых объектах, генератор переменного напряжения и конденсатор. Согласно изобретению, проводник каждой индуктивности выполнен в форме плоского прямоугольного меандра, проводники расположены на внутренних поверхностях параллельных диэлектрических подложек и смещены в исходном положении относительно друг друга на четверть периода меандра, выходы индуктивностей с одной стороны соединены между собой гибкими проводниками, а с другой стороны - с обкладками конденсатора, с образованием колебательного контура в составе генератора переменного напряжения, частота генерации которого зависит от резонансной частоты колебательного контура и выходы которого являются входами регистрирующего устройства.
В частном случае выполнения проводники индуктивностей нанесены на диэлектрическую подложку методом травления.
В другом частном случае выполнения проводники индуктивностей нанесены на диэлектрическую подложку методом изготовления печатных плат.
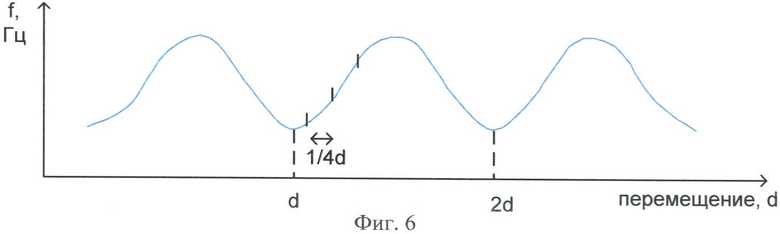
Изобретение поясняется чертежами. На фиг.1 изображена электрическая схема индуктивного датчика перемещения.
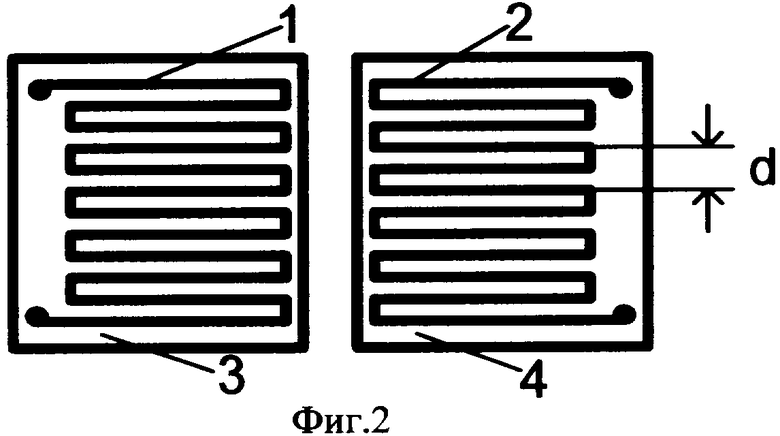
На фиг.2 - форма выполнения проводников индуктивностей.
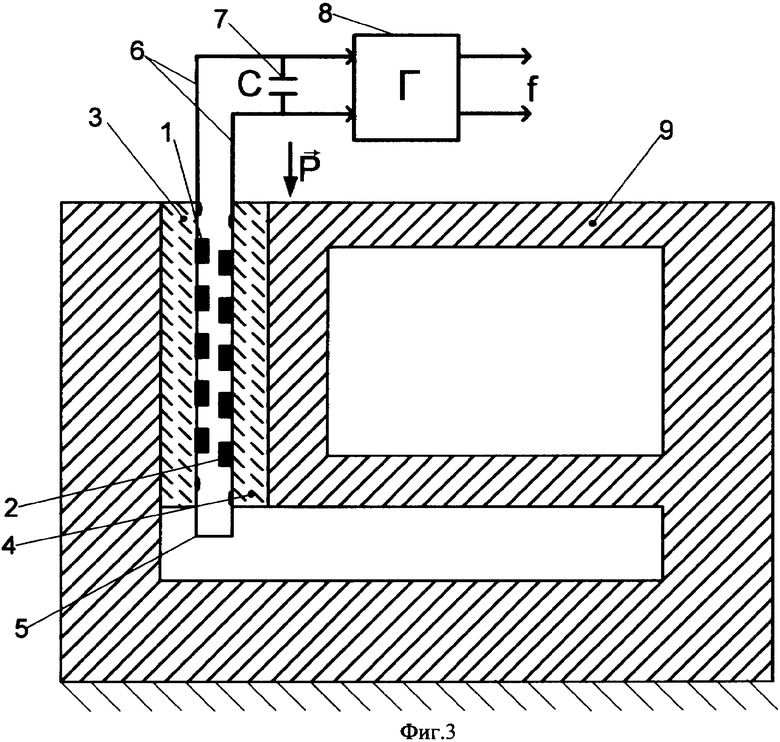
На фиг.3 - схема индуктивного датчика перемещения, размещенного на упругом элементе электронных весов.
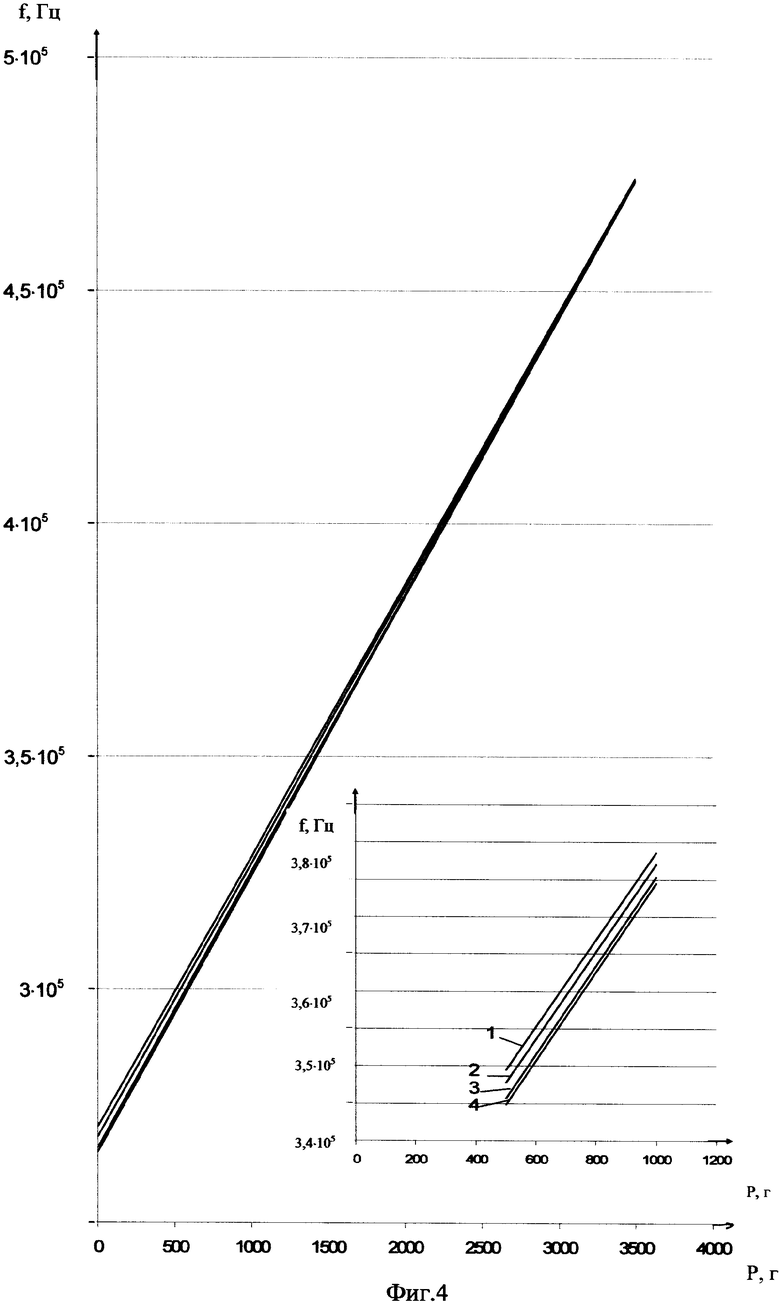
На фиг.4 - график температурной зависимости частоты генерации f, Гц, от воздействующего веса Р, г. Кривая 1 соответствует измерению при Т=0°С, кривая 2 - при Т=10°С, кривая 3 - при Т=20°С, кривая 4 - при Т=30°С.
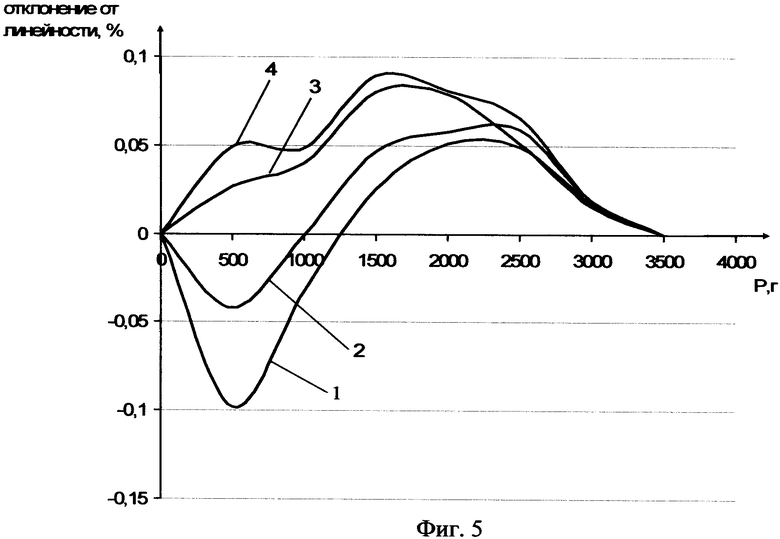
На фиг.5 - график зависимости погрешности измерений % от веса Р, г, где кривая 1 соответствует измерению при Т=0°С, кривая 2 - при Т=10°С, кривая 3 - при Т=20°С, кривая 4 - при Т=30°С.
На фиг.6 - график зависимости частоты f, Гц, генератора переменного напряжения от перемещения в периодах меандра d.
В таблице приведены данные температурной зависимости частоты генерации f, Гц, от воздействующего веса Р, г.
Индуктивный датчик перемещений содержит две индуктивности 1, 2 (фиг.1), устанавливаемые на взаимно плоско параллельно перемещаемые объекты, представляющие собой проводники, выполненные в форме плоских прямоугольных меандров 1, 2 (фиг.2), расположенные на внутренних поверхностях параллельных диэлектрических подложек 3, 4 и смещенные относительно друг друга на расстояние, равное четверти периода меандра 1/4 d. Выходы индуктивностей с одной стороны соединены между собой гибкими проводниками 5, а с другой стороны - проводниками 6 с обкладками конденсатора 7, с образованием колебательного контура в составе транзисторного генератора переменного напряжения 8, частота генерации которого зависит от резонансной частоты колебательного контура, и выходы являются входами регистрирующего устройства (не показано).
Относительное перемещение подложек 3, 4 с плоскими прямоугольными меандрами 1, 2 вызывает изменение индуктивности и, следовательно, резонансной частоты колебательного контура, образованного индуктивностями 1, 2 и конденсатором 7, и изменение выходной частоты f генератора переменного напряжения 8, которое определяет величину измеряемого перемещения.
Индуктивный датчик перемещения был апробирован в электронных весах. Для этого датчик с периодом меандра d=2,5 мм был смонтирован на упругом элементе электронных весов 9 (фиг.3), который опирается на основание и обеспечивает взаимное плоскопараллельное перемещение подложек 3, 4 с индуктивностями 1, 2 под действием веса Р, г, приложенного к упругому элементу 9. Из таблицы и построенной на основании полученных измерений зависимости частоты генератора переменного напряжения 9 от воздействующего веса Р, г (фиг.4), следует, что зависимость частоты генерации от воздействующего веса имеет практически линейный характер, то есть легко может быть переведена в значения измеряемой величины и мало зависит от температуры.
Более точная оценка влияния температуры и величины отклонения частоты генерации от линейности следует из графика (фиг.5), где отклонение от линейности не превышает 0,1%, что соответствует ошибке измерения веса также в 0,1%.
Что касается точности измерения перемещения, то для индуктивного датчика перемещений с периодом меандра d=2,5 мм при воздействии веса в 4000 г, перемещение, измеренное с помощью микрометра, равно 100±1 мкм, таким образом, погрешность измерения перемещения составляет 0,1 мкм.
Поскольку проводники индуктивностей 1, 2 имеют периодическую структуру, зависимость частоты f, Гц, генератора переменного напряжения от перемещения, в периодах меандра d также периодична (фиг.6), для обеспечения максимально линейной зависимости частоты генерации от перемещения, в исходном состоянии при отсутствии перемещения, меандры 1, 2 подложек 3, 4 должны быть смещены на 1/4 d.
Устройство с периодом меандра d=2,5 мм позволяет производить измерение перемещений с точностью 0,1 мкм без использования микропроцессорной коррекции нелинейности, а при их использовании может быть достигнута точность в 0,01 мкм, кроме того, точность измерений повышается с уменьшением периода меандра.
Источники информации
1. RU 2017059 C1, 5 G01B 7/00, 30.07.1994.
2. RU 2023235 C1, 5 G01B 7/00, 15.11.1994.
3. RU 2221988 C1, 5 G01B 7/00, 11.11.2002 - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНДУКЦИОННЫЙ ДАТЧИК СИЛЫ | 2011 |
|
RU2472122C1 |
| Датчик перемещений с высокой разрешающей способностью | 2022 |
|
RU2816124C2 |
| Преобразователь линейных перемещений | 1975 |
|
SU744232A1 |
| УНИВЕРСАЛЬНЫЙ СЕЛЕКТИВНЫЙ ИНДУКЦИОННЫЙ МЕТАЛЛОИСКАТЕЛЬ | 2021 |
|
RU2772406C1 |
| ИНДУКЦИОННЫЙ ДАТЧИК ПОЛОЖЕНИЯ | 2011 |
|
RU2454625C1 |
| Устройство для измерения линейных перемещений | 1980 |
|
SU949329A1 |
| СПОСОБ И УСТРОЙСТВО КАЛИБРОВКИ ТЕРМОМЕТРА ПО МЕСТУ | 2017 |
|
RU2720398C1 |
| УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ ТЕМПЕРАТУРЫ ЗАГОТОВОК МЕТАЛЛИЧЕСКИХ ИЗДЕЛИЙ В ПРОЦЕССЕ ИХ ТЕХНОЛОГИЧЕСКОЙ ОБРАБОТКИ | 1999 |
|
RU2156964C1 |
| ДАТЧИК ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ ПОДРЕССОРЕННОЙ МАССЫ | 2008 |
|
RU2382983C1 |
| Парамагнитный датчик | 2021 |
|
RU2778032C1 |
Изобретение относится к измерительной технике. Сущность: индуктивный датчик перемещений содержит две индуктивности (1, 2), выполненные в форме плоских прямоугольных меандров, нанесенные на диэлектрические пластины (3, 4). Индуктивности (1, 2) расположены параллельно друг к другу со смещением на четверть периода меандра. С одной стороны индуктивности соединены между собой гибким проводником (15), а с другой - с конденсатором (7) с образованием колебательного контура в составе транзиторного генератора переменного напряжения (8). Относительное линейное перемещение диэлектрических пластин (3, 4) вызывает изменение суммарной индуктивности датчика, резонансной частоты колебательного контура и выходной частоты генератора переменного напряжения (8). Технический результат: повышение точности измерения перемещений. 2 з.п. ф-лы, 1 табл., 6 ил.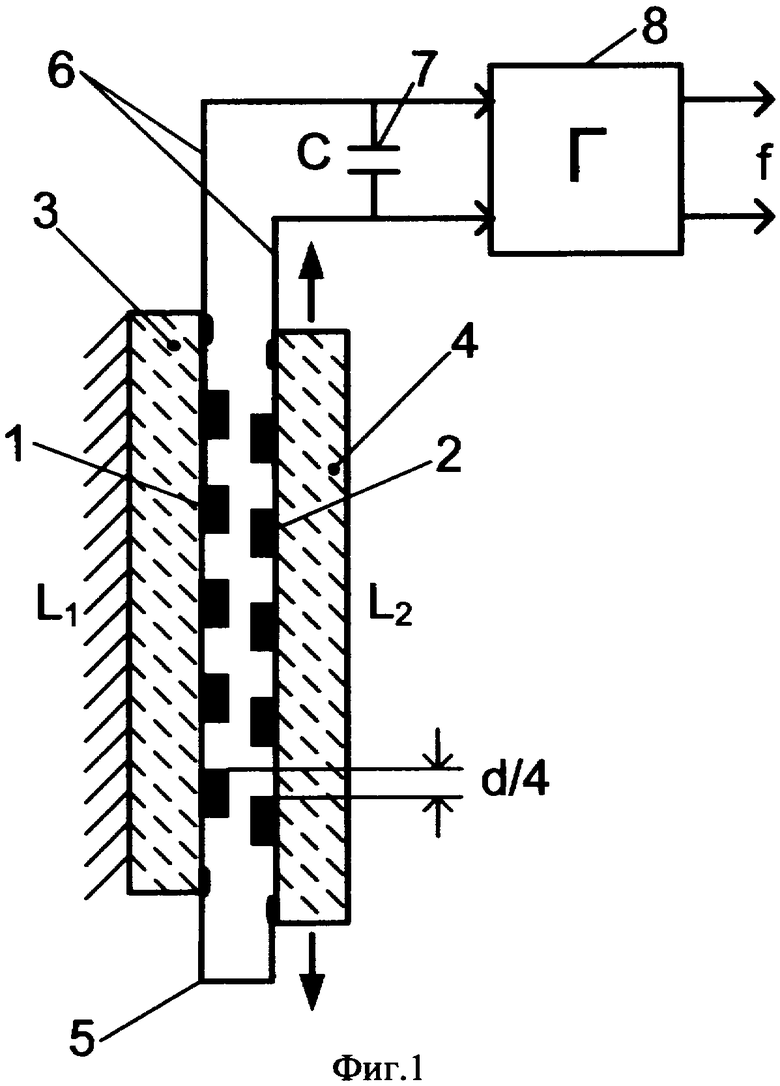
1. Индуктивный датчик перемещений, содержащий две индуктивности, установленные на взаимно перемещаемых объектах, генератор переменного напряжения и конденсатор, проводник каждой индуктивности выполнен в форме плоского прямоугольного меандра, проводники расположены на внутренних поверхностях параллельных диэлектрических подложек и смещены в исходном положении относительно друг друга на четверть периода меандра, выходы индуктивностей с одной стороны соединены между собой гибкими проводниками, а с другой стороны с обкладками конденсатора, с образованием колебательного контура в составе генератора переменного напряжения, частота генерации которого зависит от резонансной частоты колебательного контура, и выходы являются входами регистрирующего устройства.
2. Индуктивный датчик по п.1, отличающийся тем, что проводники индуктивностей нанесены на диэлектрическую подложку методом травления.
3. Индуктивный датчик по п.1, отличающийся тем, что проводники индуктивностей нанесены на диэлектрическую подложку методом изготовления печатных плат.
| Датчик линейных перемещений | 1981 |
|
SU994917A1 |
| Линейный индуктосин | 1973 |
|
SU462197A1 |
| 0 |
|
SU157920A1 | |
| US 6922051 В2, 26.07.2005 | |||
| US 5804963 A, 08.09.1998. | |||

