Изобретение относится к измерительной технике и может быть использовано для контроля положения и перемещения различных объектов, например грохотов.
Известен трансформаторный датчик перемещений, содержащий магнитопровод с катушками возбуждения и четырьмя наконечниками, между которыми расположен якорь и которые снабжены измерительными катушками (Агейкин Д.И. и др. Датчики систем автоматического контроля и регулирования, Машгиз, М.,1959, с.166).
Недостатком известного датчика является то, что он не позволяет определить направление перемещения.
Наиболее близким по технической сущности к изобретению является индуктивно-трансформаторный датчик контроля перемещений, содержащий магнитопровод с четырьмя наконечниками, снабженный первичной и вторичными обмотками, ферромагнитный якорь, при этом сердечник датчика представляет собой два расположенных взаимно перпендикулярно Ш-образных магнитопровода, первичная обмотка расположена на одном общем центральном стержне, а якорь представляет собой прямоугольную пластину, расположенную так, что центры ее сторон находятся напротив центров стержней, несущих вторичные обмотки (авт. свид. СССР N 665202, кл. GOB 7/00; GOP 3/52, 1978, прототип).
Недостатком данного датчика является то, что он не позволяет осуществлять одновременное измерение и суммирование перемещении двух объектов.
Задачей изобретения является расширение функциональных возможностей датчика путем обеспечения одновременного измерения и суммирования перемещений двух объектов. Для этого индуктивно-трансформаторный датчик контроля перемещений, содержащий крестообразный сердечник в виде двух расположенных взаимно перпендикулярно Ш-образных магнитопроводов, стержни которых направлены в одну сторону, ферромагнитный якорь в виде прямоугольной пластины, расположенной так, что центры ее сторон находятся напротив центров стержней магнитопроводов, первичную обмотку, расположенную на общем центральном стержне, расположенные на крайних стержнях магнитопроводов две пары вторичных обмоток, снабжен дополнительным крестообразным сердечником в виде двух расположенных взаимно перпендикулярно Ш-образных магнитопроводов, керны которых совмещены с кернами основных магнитопроводов, а стержни направлены в противоположную основным стержням сторону, дополнительным ферромагнитным якорем в виде прямоугольной пластины, расположенной так, что центры ее сторон находятся напротив центров стержней дополнительных магнитопроводов, дополнительной первичной обмоткой, расположенной на общем центральном стержне дополнительных магнитопроводов, и расположенными на крайних стержнях дополнительных магнитопроводов двумя парами дополнительных вторичных обмоток, все вторичные обмотки включены по мостовой схеме измерения, а основная и дополнительная первичные обмотки включены параллельно.
Такое выполнение датчика позволяет осуществить одновременное измерение и суммирование перемещений двух объектов.
На чертеже схематично изображен описываемый датчик.
Индуктивно-трансформаторный датчик контроля перемещений содержит крестообразный сердечник 1, якорь 2, первичную обмотку 3 и вторичные обмотки 4-7.
Сердечник 1 состоит из двух расположенных взаимно перпендикулярно Ш-образных магнитопроводов, стержни которых направлены в одну сторону. Якорь 2 представляет собой ферромагнитную пластину, расположенную так, что центры ее сторон находятся напротив центров стержней магнитопроводов. На общем центральном стержне Ш-образных магнитопроводов расположена первичная обмотка 3, а на крайних стержнях расположены вторичные обмотки 4-7.
Вторичные обмотки противоположных стержней соединены по дифференциальной схеме, при этом каждая пара обмоток обеспечивает регистрацию смещения якоря вдоль одного из взаимно перпендикулярных направлений.
Датчик снабжен дополнительным крестообразным сердечником 8, состоящим из двух расположенных взаимно перпендикулярно Ш-образных магнитопроводов, стержни которых направлены в противоположную основным стержням сторону, а керн совмещен с керном основного магнитопровода 1, дополнительными аналогичными якорем 9 в виде прямоугольной пластины, расположенной так, что центры ее сторон находятся напротив центров стержней дополнительных магнитопроводов, первичной обмоткой 10, расположенной на общем центральном стержне дополнительного магнитопровода 8, и расположенными на крайних стержнях дополнительных магнитопроводов двумя парами дополнительных вторичных обмоток 11-14. Пары дополнительных вторичных обмоток 11-14, расположенные на противоположных стержнях, соединены по дифференциальной схеме и обеспечивают регистрацию смещения дополнительного якоря 9 вдоль одного из взаимно перпендикулярных направлений.
Основная и дополнительная первичные обмотки соединены параллельно, а все вторичные обмотки - по мостовой схеме измерения.
В целом магнитная система датчика может быть представлена в виде расположенных взаимно перпендикулярно двух Ш-образных сердечников, стержни которых направлены противоположно, а центральные стержни являются общими, и двух оппозитно расположенных и выполненных каждый в виде прямоугольной пластины ферромагнитных якорей.
Датчик работает следующим образом.
В исходном положении при подаче напряжения переменного тока на первичные обмотки 3 и 10 на всех вторичных обмотках 4-7 и 11-14 индуктируется одинаковый по величине сигнал, поэтому на выходе каждой дифференциальной системы сигнал отсутствует. При относительном смещении основных якоря 2 и магнитопровода 1 в любом направлении на выходе каждой дифференциальной системы появляется сигнал, пропорциональный смещению, а фаза сигнала определяется направлением этого смещения.
Аналогично при относительном смещении дополнительных якоря 9 и магнитопровода 8 в любом направлении на выходе каждой дифференциальной системы появляется сигнал, пропорциональный смещению, а фаза сигнала определяется направлением этого смещения.
Поскольку все вторичные обмотки соединены по мостовой схеме, результирующий выходной сигнал будет равен алгебраической сумме взаимных перемещений основных и дополнительных якорей и магнитопроводов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК ПЕРЕМЕЩЕНИЙ ТРАНСФОРМАТОРНОГО ТИПА | 1991 |
|
RU2031358C1 |
| ТРАНСФОРМАТОРНЫЙ ДАТЧИК УГЛА ПОВОРОТА ВАЛА | 1997 |
|
RU2145053C1 |
| ТРАНСФОРМАТОРНЫЙ ДАТЧИК УГЛА ПОВОРОТА ДВУХ ВАЛОВ | 1991 |
|
RU2010156C1 |
| Трансформаторный датчик для измерения взаимных угловых перемещений двух вращающихся объектов | 1988 |
|
SU1596209A1 |
| МАГНИТОМОДУЛЯЦИОННЫЙ ИНДУКТИВНЫЙ ДАТЧИК ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1991 |
|
RU2023235C1 |
| Трансформаторный датчик угловых перемещений | 1981 |
|
SU974110A1 |
| Трансформаторный датчик угла поворота двух объектов | 1991 |
|
SU1810747A1 |
| ДАТЧИК ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1997 |
|
RU2132534C1 |
| ДАТЧИК ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1997 |
|
RU2138774C1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ ИНДУКТИВНЫЙ ДАТЧИК ПЕРЕМЕЩЕНИЙ | 1991 |
|
RU2017059C1 |
Изобретение предназначено для контроля положения различных объектов, например грохотов. Датчик содержит магнитопровод в виде размещенных перпендикулярно друг другу двух Ш-образных сердечников. Стержни сердечников расположены параллельно. Центральные стержни сердечников являются общими. Керны Ш-образных сердечников совмещены друг с другом и образуют один общий крестообразный керн. Датчик имеет также два ферромагнитных якоря в виде прямоугольных пластин. Якоря размещены так, что центры их сторон располагаются напротив центров торцов крайних стержней. На центральных стержнях располагаются две включенные параллельно первичные обмотки. На крайних стержнях размещены четыре пары вторичных обмоток, включенные по мостовой схеме. Датчик позволяет контролировать положение в двух координатах каждого из двух объектов, соединяемых с подвижными якорями. 1 ил.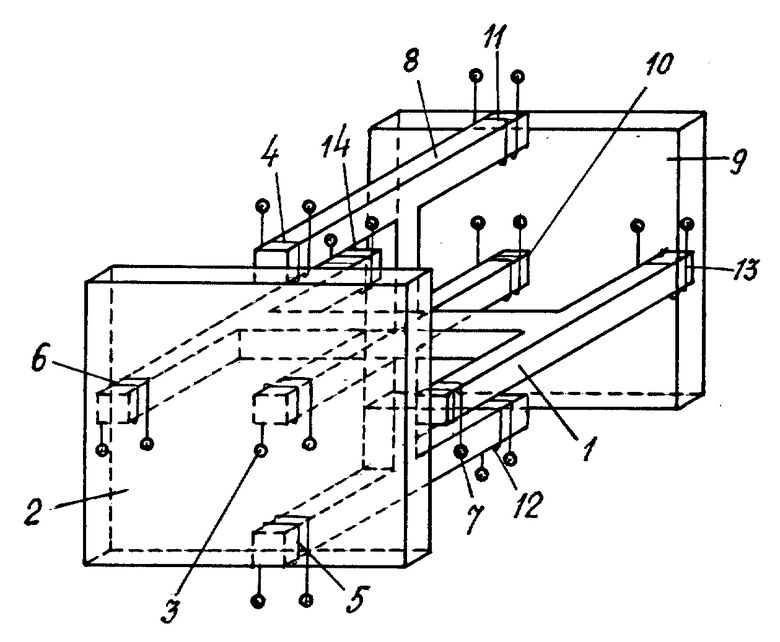
Индуктивно-трансформаторный датчик контроля перемещений, содержащий крестообразный сердечник в виде двух расположенных взаимно перпендикулярно Ш-образных магнитопроводов, стержни которых направлены в одну сторону, ферромагнитный якорь в виде прямоугольной пластины, расположенной так, что центры ее сторон находятся напротив центров стержней магнитопроводов, первичную обмотку, расположенную на общем центральном стержне, расположенные на крайних стержнях магнитопроводов две пары вторичных обмоток, отличающийся тем, что он снабжен дополнительным крестообразным сердечником в виде двух расположенных взаимно перпендикулярно Ш-образных магнитопроводов, керны которых совмещены с кернами основных магнитопроводов, а стержни направлены в противоположную основным стержням сторону, дополнительным ферромагнитным якорем в виде прямоугольной пластины, расположенной так, что центры ее сторон находятся напротив центров стержней дополнительных магнитопроводов, дополнительной первичной обмоткой, расположенной на общем центральном стержне дополнительных магнитопроводов, и расположенными на крайних стержнях дополнительных магнитопроводов двумя парами дополнительных вторичных обмоток, все вторичные обмотки включены по мостовой схеме измерения, а основная и дополнительная первичные обмотки включены параллельно.
| Индуктивно-трансформаторный датчик контроля перемещений | 1975 |
|
SU665202A1 |
| Индуктивно-трансформаторный датчик перемещений | 1988 |
|
SU1516747A1 |
| Агейкин Д.И | |||
| и др | |||
| Датчики контроля и регулирования | |||
| - М.: Машиностроение, 1965, с.131 - 132. | |||

