Изобретение относится к вибродиагностике роторных машин и может быть использовано для контроля технического состояния газотурбинного двигателя.
Известны системы контроля параметров вибрации корпуса газотурбинного двигателя, содержащие датчик вибрации, электронный блок преобразования с полосовым фильтром и блок индикации [1, 2].
Помехоустойчивость таких систем невелика, так как в полосе пропускания фильтра находятся помеховые составляющие входного сигнала электронного блока, увеличение амплитуды которых при возникновении неисправности в датчике или бортовой проводке (например, при нарушении экранирования соединительной линии) приводит к ложному срабатыванию исполнительного элемента - табло аварийной сигнализации, что воспринимается обслуживающим персоналом, как сигнал о неисправности двигателя.
При срабатывании аварийной сигнализации необходимо срочно выключить двигатель, чтобы избежать его разрушения. При этом экстренное отключение исправного двигателя, как правило, приводит к неоправданным издержкам. Например, отключение двигателя летательного аппарата в полете рассматривается как предпосылка к летному происшествию не только в случае действительной неисправности двигателя, но и при ложной тревоге (по причине отказа аппаратуры контроля, вызвавшего включение аварийного сигнала).
Известны также системы контроля вибрации газотурбинного двигателя с узкополосными следящими фильтрами [3, 4]. Помехоустойчивость таких систем значительно выше, так как из узкополосный следящий фильтр постоянно настроен на выделение из спектра входного сигнала только той его составляющей, частота которой совпадает с частотой вращения ротора газотурбинного двигателя. Другие спектральные составляющие входного сигнала (в том числе и помеховые) находятся в полосе задерживания следящего фильтра и на его выход не проходят.
Наиболее близким по технической сущности и достигаемому эффекту является устройство для контроля вибрации газотурбинного двигателя, [5], содержащее вибропреобразователь, подключенный через согласующий блок к двум измерительным цепям, каждая из которых выполнена в виде последовательно соединенных следящего фильтра, фильтра нижних частот и усилителя два компаратора и два формирователя опорной частоты, входы которых подключены к внешним тахометрам, а выходы соединены через коммутаторы с управляющими входами следящих фильтров.
Отказ, возникший в такой системе контроля (например, неисправность вибропреобразователя, неисправность тахометра, обрыв в бортовой проводке от датчика до электронного блока) обнаружить сложно, так как отсутствуют его внешние проявления. Как правило такие отказы выявляются только при проведении периодических регламентных работ. С другой стороны, наличие скрытого (не выявленного) дефекта аппаратуры контроля приводит к эксплуатации двигателя без защиты по вибрационным параметрам, что может явиться причиной аварии.
Проведение периодических проверок системы контроля, необходимых для обеспечения достаточной вероятности ее нормального функционирования, связано со значительными затратами на техническое обслуживание и вынужденным простоем объекта (например, самолета).
Наиболее трудоемкими являются проверки вибропреобразователя и тахометров, так как эти проверки связаны с применением специальных стендов для имитации рабочих воздействий и необходимостью демонтажа датчиков.
Достоверность контроля вибрации в периоды между проведением плановых проверок не гарантируется. Это является недостатком известных систем контроля вибрации газотурбинного двигателя.
Целью изобретения является повышение достоверности контроля вибросостояния двигателя и снижение затрат на техническое обслуживание и ремонт системы контроля вибрации в условиях эксплуатации за счет организации функци- онального контроля работоспособности ее датчиков (вибропреобразователя и тахометров) с выявлением отказа и локализацией отказавшего элемента в течение минимального времени после возникновения неисправности.
Для достижения указанной цели предлагаемое устройство, содержащее соединенные последовательно вибропреобразо- ватель и согласующий блок и две измерительные цепи со следящими фильтрами, первые входы которых подключены к выходу согласующего блока, а выходы являются соответственно первым и вторым выходами устройства, два формирователя опорной частоты, входы которых являются соответственно первым и вторым частотными входами устройства и два коммутатора, входы которых подключены соответственно к выходам формирователей опорной частоты, а выходы - к вторым входам измерительным цепей, а также два компаратора, входы которых подключены соответственно к выходам измерительных цепей, дополнительно снабжено двумя преобразователями частоты в напряжение, входы которых подключены соответственно к выходам коммута- торов, третьим и четвертым компараторами, первые входы которых подключены соответственно к выходам преобразователей частоты в напряжение, второй вход третьего компаратора соединен с выходом четвертого компаратора, а второй вход четвертого компаратора - с выходом третьего компаратора, элементом ИЛИ, элементом ИСКЛЮЧАЮЩЕЕ ИЛИ, блоком задержки и тремя элементами И, выходы которых являются соответственно третьим, четвертым и пятым выходами устройства, причем выход третьего компаратора подключен к первым входам элемента ИЛИ и элемента ИСКЛЮ- ЧАЮЩЕЕ ИЛИ, а выход последнего соединен с входом блока задержки, выход четвертого компаратора подключен к вторым входам элемента ИСКЛЮЧАЮЩЕЕ ИЛИ и элемента ИЛИ, выход которого соединен с первыми входами трех элементов И, выход блока задержки подключен к третьим входам первого элемента и третьего элемента И, выход первого компаратора - к второму входу первого элемента И и третьему входу второго элемента И, а выход второго компаратора - к вторым входам второго элемента И и третьего элемента И.
Сигнал вибропреобразователя поступает на вход согласующего блока, в котором происходит его преобразование в электрическое напряжение, пропорциональное контролируемому параметру вибрации, например виброскорости. Сигнал на выходе согласующего блока содержит множество составляющих частотного спектра вибрации двигателя. Выделение из этого спектра информативных составляющих сигнала (пропорциональных роторным вибрациям, характеризующим техническое состояние двигателя) производится в измерительных цепях путем узкополосной следящей фильтрации этих составляющих.
Фильтрация обеспечивается полосовыми следящими фильтрами высокой добротности Q (например, Q =  = 30, где fр - текущее значение частоты вращения контролируемого ротора, Δf - полоса пропускания следящего фильтра на уровне 0,7).
= 30, где fр - текущее значение частоты вращения контролируемого ротора, Δf - полоса пропускания следящего фильтра на уровне 0,7).
Центральная частота каждого следящего фильтра определяется, в свою очередь, частотой импульсного сигнала на его управляющем входе и автоматически настраивается на частоту контролируемой роторной гармоники спектра. Частота импульсного управляющего сигнала пропорциональна частоте вращения соответствующего ротора двигателя. При изготовлении конкретного устройства следящий фильтр настраивают с учетом коэффициента пропорциональности этих частот таким образом, что он пропускает без искажения только контролируемую (роторную) составляющую входного сигнала во всем диапазоне изменения рабочих частот вращения ротора.
Управление следящими фильтрами измерительных цепей производится с помощью частотных сигналов, поступающих от двух тахометров, установленных на двигателе. Частота импульсного сигнала на выходе каждого тахометра пропорциональна скорости (частоте) вращения того ротора двигателя, с которым связан индуктор этого тахометра.
Выходные частотные сигналы тахометров через формирователи опорной частоты, обеспечивающие требуемую форму импульсов (крутизну фронтов и амплитуду), поступают на коммутаторы и далее - на управляющие входы соответствующих измерительных цепей со следящими фильтрами. При этом коммутаторы обеспечивают управление частотно зависимыми элементами следящих фильтров, например, путем формирования неперекрывающихся импульсных последовательностей для коммутации переключаемых конденсаторов.
По этим частотным сигналам производится автоматическая настройка центральных частот следящих фильтров таким образом, что в каждый момент времени (при работающем двигателе) они равны частотам вращения соответствующих роторов двигателя. Каждый следящий фильтр выделяет из общего спектра сигнала на входе измерительной цепи только ту составляющую, частота которой совпадает с частотой вращения ротора, и амплитуда сигнала на его выходе пропорциональна вибрации этого ротора (например, вибрации ротора вентилятора - на выходе следящего фильтра первой измерительной цепи и вибрации ротора компрессора - на выходе следящего фильтра второй измерительной цепи). Другие частотные составляющие спектра ослабляются (не проходят на выход), так как находятся в полосе задерживания следящего фильтра.
Функциональный контроль исправности вибропреобразователя и тахометров, а также цепей их соединения с электронным блоком устройства осуществляется путем автоматического анализа текущих значений аналогового и частотных входных сигналов. При возникновении неисправности выдается информация об отказе и наиболее вероятном месте его возникновения. Анализ проводится при работающем двигателе (например, в течение всего времени полета летательного аппарата, а информация об отказах выводится с соответствующих выходов устройства во внешний блок индикации для отображения в удобной для конкретного применения устройства форме (например, с помощью световых индикаторов на приборной доске бортинженера).
На основании этой информации принимается решение о необходимости ремонта аппаратуры контроля (внеплановом технической обслуживании и выбирается оптимальный алгоритм поиска неисправного элемента.
Функциональный контроль основан на следующих исходных данных:
Частотные сигналы двух тахометров (соединенных с двумя роторами одного двигателя) коррелированы между собой, т.е. при работающем двигателе оба тахометра вырабатывают частотные сигналы в известных частотных диапазонах, при неработающем двигателе - сигналы с обоих тахометров отсутствуют.
Скорости вращения роторов работающего двигателя изменяются в зависимости от режимов работы (от малого газа до форсажа) в известных диапазонах скоростей (частот) вращения и не могут быть меньше нижних границ этих диапазонов. Характеристики взаимодействия роторов двигателя (относительное изменение скоростей вращения) в переходном режиме при запуске и останове двигателя (т.е., вне рабочих диапазонов частот) известны.
Значения роторных вибраций работающего двигателя находятся в диапазоне, нижняя граница которого отлична от нуля (например, значения роторных составляющих вибрации работающего двигателя не менее 3 мм/с в течение всего времени работы двигателя).
Узкополосный следящий фильтр пропускает только полезный сигнал (роторную составляющую спектра) и только при наличии достоверных (содержащих полезную информацию) сигналов на обоих (аналоговом и частотном) входах измерительной цепи, а в противном случае (если хотя бы один из двух входных сигналов измерительной цепи не содержит информативной составляющей) его выходной сигнал близок к нулю. Помехоустойчивость измерительной цепи обеспечивается высокой избирательностью следящего фильтра.
Частотные сигналы тахометров с выходов соответствующих коммутаторов поступают на входы преобразователей частоты в напряжение (ПЧН). ПЧН преобразует входной частотный сигнал в напряжение постоянного тока, текущее значение которого пропорционально частоте этого сигнала.
Диапазоны частот вращения каждого ротора в установившихся режимах работы двигателя известны. Например, диапазон частот вращения ротора вентилятора - от 30 до 80 Гц и диапазон частот вращения ротора компрессора - от 100 до 250 Гц. Соответственно, известны и рабочие диапазоны частотных сигналов тахометров, формирующих заданное число импульсов за один оборот ротора. При разгоне (после включения) и остановке (после выключения) двигателя частоты вращений роторов изменяются в диапазоне от нуля до нижней границы рабочего диапазона.
Выходные сигналы двух ПЧН поступают на первые входы соответствующих пороговых элементов (третьего и четвертого компараторов). При превышении выходным напряжением ПЧН заданного порогового уровня компаратор срабатывает и на его выходе устанавливается сигнал лог.1, свидетельствующий о превышении оборотами ротора заданного значения частоты вращения.
С целью обеспечения помехоустойчивости и для синхронизации (в заданном временном интервале) работы третьего и четвертого компараторов каждый из них имеет по два уровня срабатывания. Первый уровень срабатывания определяется значением опорного напряжения +θo и устанавливается равным значению выходного напряжения ПЧН, соответствующего нижней границе рабочего диапазона частот вращения ротора. Второй уровень срабаты- вания определяется как значением +, так и значением сигнала соответствующего лог.1 на втором входе компаратора.
Вторые уровни срабатывания этих компараторов несколько ниже, чем их первые уровни срабатывания (например, 0,5-0,7 от нижней границы рабочего диапазона частот вращения ротора). Такое включение компараторов, фиксирующих значение сигналов на частотных входах устройства, позволяет обеспечить оптимальный алгоритм работы устройства в переходных режимах (при включении или отключении двигателя).
Таким образом, выходы третьего и четвертого компараторов находятся в состоянии лог.0, если двигатель не включен и переходит в состояние "Лог.1" в процессе запуска двигателя. Состояние "Лог.1" сохраняется на этих выходах в течение всего времени работы двигателя, после его отключения и снижения оборотов роторов выходы этих компараторов возвращаются в состояние "Лог.0".
Разные логические уровни на выходах этих компараторов, сохраняющиеся в течение отрезка времени, превышающего заданное время переходного процесса, свидетельствуют об отказе одного из тахометров или одной из цепей преобразования частотного сигнала (формирователь-коммутатор-ПЧН-компаратор).
Выходы компараторов подключены соответственно к двум входам элемента ИСКЛЮЧАЮЩЕЕ ИЛИ. Сигнал "Лог.1" появляется на выходе этого элемента в том случае, если логические сигналы на его входах различны.
Выход элемента ИСКЛЮЧАЮЩЕЕ ИЛИ подключен к входу блока задержки, исключающего промежуточные состояния сигналов в переходных режимах работы устройства.
Для обеспечения локализации отказа дополнительно контролируется превышение минимальных уровней сигналов на выходах измерительных цепей (т.е. прохождение полезной информации через следящие фильтры).
Контроль производится с помощью двух компараторов, подключенных соответственно к выходам измерительных цепей. На выходе каждого из этих компараторов устанавливается сигнал "Лог.1", если значение сигнала на его входе меньше уровня, соответствующего минимально возможной вибрации ротора работающего двигателя, например меньше 3 мм/с, или "Лог.0", если значение входного сигнала равно этому уровню или превышает его.
Таким образом, сигнал "Лог.1" на выходе первого или второго компаратора при работающем двигателе, свидетельствует об отказе соответствующего тахометра или цепи преобразования (формирователь-коммутатор-измерительная цепь-компаратор). Сигналы "Лог.1" на выходах обоих этих компараторов устанавливаются в том случае, если двигатель не работает, а при работающем двигателе при отказе вибропреобразователя или согласующего блока.
Признаком работы двигателя является превышение частотным сигналом по крайней мере одного из двух тахометров заданного минимального значения частоты и соответственно срабатывание как минимум одного из двух компараторов (третьего или четвертого), фиксирующих это превышение. Выходы этих двух компараторов объединены через элемент ИЛИ.
Выявление и локализация отказов вибропреобразователя и тахометров производится путем автоматического анализа сочетаний логических сигналов на выходе блока задержки, выходах первого и второго компараторов и выходе элемента ИЛИ. При этом учитывается, что надежность узлов электронного блока, непосредственно соединенных с соответствующими датчиками (согласующего блока, формирователей опорной частоты и коммутаторов), может быть обеспечена значительно более высокой, чем надежность вибропреобразователя и тахометров и надежность их соединений с электронным блоком. Отказы же электронного блока в эксплуатации выявляются, как правило, с помощью штатных средств контроля электронного оборудования.
Анализ сочетаний логических сигналов производится тремя элементами И. На три входа первого элемента И поступают логические сигналы с выходов элемента ИЛИ, блока задержки и первого компаратора. Три логические единицы на входах этого элемента И переводят его выход в состояние "Лог.1", что свидетельствует об отказе тахометра первого ротора.
Три входа второго элемента И подключены к выходам элемента ИЛИ, первого компаратора и второго компаратора. "Лог. 1" на выходе этого элемента И свидетельствует об отказе вибропреобразователя.
Три входа третьего элемента И подключены к выходам элемента ИЛИ, блока задержки и второго компаратора. "Лог.1" на выходе этого элемента И свидетельствует об отказе тахометра второго ротора.
Во всех случаях как отказ датчика (вибропреобразователя или тахометра), так и повреждение бортовой проводки, соединяющей датчик с электронным блоком, фиксируются устройством как отказ датчика.
Так как формирование каждого выходного сигнала об отказе производится по двумя признакам (не считая признака работы двигателя) независимыми цепями устройства, отказы его электронной части практически не влияют на достоверность информации об отказах датчиков.
Предлагаемое устройство для контроля вибрации газотурбинного двигателя обеспечивает повышенную достоверность контроля вибросостояния двигателя и позволяет сократить трудоемкость работ по техниче скому обслуживанию аппаратуры контроля в эксплуатации за счет увеличения периода эксплуатации между проведением плановых (регламентных работ). Кроме того, сокращается время поиска неисправности при отказах датчиков и соответственно время вынужденного простоя объекта (например, самолета).
Повышение достоверности достигнуто за счет автоматического контроля функционирования вибропреобразователя и двух тахометров в течение всего времени работы двигателя.
Это свойство является существенным отличием предлагаемого устройства от известных систем контроля вибрации, в том числе и прототипа.
На чертеже представлена блок-схема устройства для контроля вибрации газотурбинного двигателя.
Оно содержит соединенные последовательно вибропреобразователь 1 и согласующий блок 2, измерительные цепи 3,4, первые входы которых подключены к выходу согласующего блока 2, формирователи 5,6 опорной частоты, входы которых подключены соответственно к внешним тахометрам первого и второго роторов (на чертеже не показаны), коммутатор 7, вход которого соединен с выходом формирователя 6, а выход - со вторым (управляющим) входом измерительной цепи 3, и коммутатор 8, вход которого соединен с выходом формирователя 6, а выход - с вторым (управляющим) входом измерительной цепи 4, преобразователи 9,10 частоты в напряжение, компараторы 11,12, элемент ИЛИ 13, элемент ИСКЛЮЧАЮЩЕЕ ИЛИ 14, блок 15 задержки, компараторы 16,17, трехвходовые элементы И 18,19,20.
Вход преобразователя 9 соединен с выходом коммутатора 7, а его выход - с первым входом компаратора 11. Вход преобразователя 10 соединен с выходом коммутатора 8, а его выход - с первым входом компаратора 12. Второй вход компаратора 11 соединен с выходом компаратора 12, второй вход последнего - с выходом компаратора 11. Выход последнего соединен с первыми входами элемента ИЛИ 13 и элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 14. Выход компаратора 12 соединен с вторыми входами элемента ИЛИ 13 и элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 14, а выход последнего - с входом блока 15 задержки.
Вход компаратора 16 соединен с выходом измерительной цепи 3, его выход - с вторым входом элемента 18 и третьим входом элемента 19 И. Вход компаратора 17 соединен с выходом измерительной цепи 4, его выход - с вторыми входами элемента И 19 и элемента И 20. Первые входы трех элементов И 18,19,20 соединены с выходом элемента 13 ИЛИ, а третьи входы элемента И 18 и элемента И 20 - с выходом блока 15 задержки. Выходы измерительной цепи 3, измерительной цепи 4 и трех элементов И являются выходами устройства и подключены к внешнему блоку индикации (на чертеже не показан). Каждая из двух измерительных цепей 3,4 выполнена в виде последовательного соединения следящего фильтра 21, фильтра 22 нижних частот, усилителя 23 и детектора 24, при этом управляющий вход каждого следящего фильтра 21 соединен с управляющим входом соответствующей измерительной цепи 3,4.
Устройство для контроля вибрации газотурбинного двигателя работает следующим образом.
Электрический сигнал, пропорциональный вибрации корпуса двигателя в месте установки вибропреобразователя 1, поступает с его выхода на вход согласующего блока 2, в котором этот сигнал (например электрический заряд, преобразуется в электрическое напряжение, пропорциональное контролируемому параметру вибрации. Согласующий блок 2 выполнен, например, по схеме усилителя заряда и представляет собой усилитель, охваченный глубокой емкостной отрицательной обратной связью.
Выходной сигнал согласующего блока 3 содержит как информативные частотные составляющие, пропорциональные роторным вибрациям, так и неинформативные составляющие, источниками которых являются не роторные вибрации двигателя и электромагнитные помехи.
Выделение информативных составляющих сигнала производится измерительной цепью 3 со следящим фильтром и аналогичной измерительной цепью 4, на первые (аналоговые) входы которых поступает электрический сигнал с выхода согласующего блока 2.
Следящий фильтр 21 каждой измерительной цепи выделяет одну информативную (роторную) составляющую из общего спектра сигнала, поступающего на его вход. Выделение этой составляющей достигается тем, что следящий фильтр 21 имеет узкую полосу пропускания и центральная частота этой полосы совпадает с частотой вращения соответствующего ротора при всех режимах работы двигателя, т.е. центральная частота полосы пропускания следящего фильтра 21 измеряется синхронно с изменением частоты вращения ротора "следит" за оборотами ротора).
Синхронность изменения центральной частоты следящего фильтра 21 и частоты вращения ротора двигателя обеспечивается изменяющимися по частоте (пропорциональной скорости вращения ротора) управляющим сигналом, поступающим на второй вход измерительной цепи.
В качестве следящих фильтров измерительной цепи 3 и измерительной цепи 4 применяют, например, фильтры на переклю- чаемых конденсаторах). Соответствие требуемой центральной частоты полосы пропускания такого фильтра числу электрических импульсов, приходящих на его управляющий вход за один оборот контролируемого ротора, обеспечивается за счет выбора элементов фильтра.
Источниками частотных сигналов для управления центральными частотами следящих фильтров 21 являются тахометры, установленные на двигателе и вырабаты- вающие импульсные последовательности, частоты которых пропорциональны частотам вращения роторов. Например, тахометр первого ротора вырабатывает 64 электрических импульса за один оборот ротора вентилятора, а тахометр второго ротора - 36 импульсов за один оборот ротора компрессора).
Электрические сигналы тахометров поступают соответственно на входы формирователя 6 опорной частоты и аналогичного формирователя.
Формирователи 5 и 6 предназначены для согласования выходов тахометров с входами элементов цифровой электроники и выполняются, например, на операционных усилителях по схеме усилителя ограничителя. Выходные сигналы формирователей поступают соответственно на входы коммутаторов 7 и 8.
Эти коммутаторы преобразуют каждый из частотных сигналов тахометров в две неперекрывающиеся последовательности импульсов, необходимые для управления ключами следящего фильтра 21.
При работающем двигателе на первый (аналоговый) вход измерительной цепи 3 поступает сигнал, пропорциональный вибрации корпуса двигателя, а на ее второй (управляющий) вход - импульсный сигнал, частота которого пропорциональна частоте вращения первого ротора двигателя (например, ротора вентилятора). Под воздействием управляющих импульсов коммутатора 7 центральная частота полосы пропускания следящего фильтра 21 измерительной цепи 3 автоматически настраивается на частоту роторной гармоники, а на выход этого фильтра проходят только информативные (роторные) составляющая его входного сигнала, значение которой отлично от нуля (например, соответствует вибрации, превышающей 3 мм/c).
Необходимым условием такой работы следящего фильтра 21 является наличие полезных сигналов на обоих входах измерительной цепи 3, что выполняется только в том случае, если вибропреобразователь 1 и тахометр первого ротора исправны. В том случае, если на одном из двух входов измерительной цепи 3 нет полезного сигнала (например, при отказе одного из этих датчиков), сигнал на выходе следящего фильтра отсутствует.
Таким же образом работает и следящий фильтр 21 измерительной цепи 4, центральная частота полосы пропускания которого автоматически настраивается на частоту вращения второго ротора (например, ротора компрессора).
В каждой измерительной цепи 3,4 напряжение переменного тока, значение которого пропорционально текущему значению роторной вибрации, с выхода следящего фильтра 21 поступает на вход фильтра 21 низких частот (для исключения коммутационной помехи), затем усиливается и детектируется (преобразуется в напряжение постоянного тока). Этот выпрямленный сигнал поступает на выход измерительной цепи и далее - на выход устройства.
При отказе системы контроля вибрации теряется информация о техническом состоянии двигателя. Длительная эксплуатация неисправной системы контроля может привести к аварии, так как начальная стадия разряжения двигателя ( на котором возможны эффективные действия по ее предотвращению) останется невыявленной. Для обеспечения своевременного получения информации об отказах элементов системы контроля, работающих в наиболее тяжелых условиях (датчиков, установленных на двигателе) в устройстве предусмотрен контроль функционирования вибропреобразователя 1 и двух тахометров, который проводится автоматически при работающих двигателях.
Электрические импульсы, частота которых пропорциональна частоте вращения первого ротора двигателя, с выхода коммутатора 7 поступают на вход преобразователя 9 частоты в напряжение, предназ- наченного для перевода частотного входного сигнала в пропорциональный ему аналоговый выходной сигнал, удобный для дальнейшей обработки. Преобразователь 9 выполняется, например, по схеме на переключаемом конденсаторе.
Частота переключения конденсатора С равна частоте входного сигнала fвх, а значение эквивалентного сопротивления R1 между источником опорного напряжения (-lo) и инвертирующим входом операционного усилителя определяется выражением: Rэ=  .
.
Коэффициент передачи схемы по отношению к опорному сигналу K =  = -
= -  = - RCfвх , а значение выходного напряжения преобразователя 9 Uвых=K(-lo)=RClofвх.
= - RCfвх , а значение выходного напряжения преобразователя 9 Uвых=K(-lo)=RClofвх.
Так как значения R,Cu-lo постоянны для конкретной реализации устройства, преобразователь 9 обеспечивает линейную зависимость текущего значения выходного напряжения от частоты входного сигнала.
Аналогично частотный сигнал с выхода коммутатора 8 преобразуется в напряжение постоянного тока преобразователем 10 частоты в напряжение.
Таким образом, текущее значение сигнала на выходе преобразователя 9 пропорционально частоте вращения первого ротора двигателя, а текущее значение сигнала на выходе преобразователя 10 - пропорционально частоте вращения второго ротора двигателя.
Выходное напряжение преобразователя 9 поступает на первый вход двухуровневого компаратора 11, а выходное напряжение преобразователя 10 - на первый вход двухуровневого компаратора 12.
Двухуровневый компаратор 11 срабатывает при значении напряжения постоянного тока на его первом входе, превышающем значение опорного напряжения lo′ (если на втором входе установлен сигнал "Лог.0") или превышающем значение lo′- Δ lo′ (если на втором входе установлен сигнал "Лог.1"). При этом Δl =
=  , где Uлог1 - значение напряжения постоянного тока на втором входе компаратора 11, соответст- вующее сигналу лог.1. При срабатывании компаратора 11 сигнал на его выходе изменяется с "Лог.0" на "Лог.1".
, где Uлог1 - значение напряжения постоянного тока на втором входе компаратора 11, соответст- вующее сигналу лог.1. При срабатывании компаратора 11 сигнал на его выходе изменяется с "Лог.0" на "Лог.1".
Схема компаратора 12 аналогична схеме компаратора 11. Выход компаратора 11 соединен с вторым входом компаратора 12, а выход компаратора 12 - с вторым входом компаратора 11, что обеспечивает срабатывание обоих компараторов в том случае, если разница / сигналов на их первых входах не превышает выбранного значения Δlo′.
Компараторы 11 и 12 фиксируют наличие полезных сигналов на частотных входах устройства. Срабатывание любого из этих компараторов является признаком того, что двигатель работает (этот признак используется при автоматическом контроле функционирования), а синхронное срабатывание и отпускание обоих компараторов (с учетом допустимого времени переходного процесса) свидетельствует об исправном состоянии обоих тахометров.
Для каждого из этих компараторов первый уровень срабатывания соответствует нижней границе рабочего диапазона частот вращения Ufвх ПЧН (fimin) того ротора, тахометр которого подключен через соответствующий формирователь, коммутатор и ПЧН и его первому входу, т.е. lo′=RClofimin(где, i=1,2 - номер ротора).
Так как изменение частот вращения двух роторов двигателя (связанных между собой газодинамическим потоком продуктов сгорания топлива) как правило не имеет жесткой синхронизации, то достижение ими нижних границ рабочих частот вращения происходит не одновременно как при запуске, так и при отключении двигателя. Т.е. при переходе от отключенного состояния (оба ротора неподвижны) к рабочему режиму (частота вращения каждого ротора превышает нижнюю границу рабочего диапазона Ufвх>fimin и наоборот) имеется переходный период, который необходимо исключить при анализе корреляции частотных сигналов двух тахометров.
Уменьшение влияния переходного периода достигается за счет взаимного гистерезиса компараторов. Величина гистерезиса определяется значением второго уровня срабатывания (lo′- Δlo′) и выбирается из соображений обеспечения помехоустойчивости компараторов 11 и 12 при работе двигателя вблизи минимальных значений оборотов роторов. Второй уровень срабатывания меньше, чем первый. Например, lo′-Δ lo′=0,5 lо′=0,5RClofimin.
Требуемое значение Δl′ устанавливается подбором сопротивлений резисторов 21 и 22 компаратора.
При проектировании конкретного устройства контроля вибрации необходимо иметь данные о переходных характеристиках роторов при включении и отключении двигателей заданного типа. Эти данные могут быть представлены разработчику системы контроля на этапе согласования технического задания, например, в следующем виде. При запуске двигателя частота вращения первого ротора достигает значения 0,5F1min через отрезок времени не превышающий t1, после достижения оборотами второго ротора значения F2min. При отключении двигателя частота вращения первого ротора становится меньше значения F1min через отрезок времени, не превышающий t2 после снижения оборотов второго ротора до значения 0,5F2min. Большее из значений t1 и t2 принимается за максимально допустимое время переходного процесса tпп, которое необходимо учитывать при анализе корреляции частотных сигналов тахометров. В частном случае возможен вариант, когда tпп=0.
Срабатывание компараторов 11 и 12 происходит следующим образом.
В исходном состоянии (двигатель не работает) на выходах (и вторых входах) обоих компараторов лог.0, при наборе оборотов компаратор, подключенный к сигналу опережающего ротора, срабатывает при значении входного сигнала Uвх= lo′ и на его выходе устанавливается сигнал лог.1, который поступает на второй вход компаратора, подключенного к сигналу отстающего ротора, и изменяет его уровень срабатывания на значение lo′- Δlo′, через некоторое время Э (не превышающее tпп). Этот компаратор также срабатывает и на его выходе устанавливается "Лог.1", которая переключает и уровень срабатывания компаратора опережающего ротора на значение lo′- Δlo′.
Таким образом, компараторы 11 и 12 исправной системы контроля вибрации срабатывают после запуска двигателя и оба устанавливаются на пониженное значение уровня срабатывания lo′- Δlo′, чем обеспечивается их помехоустойчивость.
При снижении оборотов двигателя, после его отключения, отпускание компараторов 11 и 12 происходит в обратном порядке. Выходы обоих компараторов устанавливаются в состояние лог.0 и значения их уровней срабатывания снова становятся равными lo′.
Если один из частотных сигналов отсутствует, то после включения и разгона двигателя напряжение на первом входе одного из компараторов остается меньшим, чем значение lo′- Δlo′ и на их выходах устанавливаются разные логические уровни.
Выходные сигналы компараторов 11 и 12 поступают соответственно на два входа элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 14. "Лог.1" на выходе элемента 14 появляется тогда, когда сигналы на ее входах различны (т.е., если сработал только один из двух компараторов, подключенных к его входам) и является признаком отказа одного из тахометров в том случае, если этот сигнал (лог.1) или сохраняется в течение времени, превышающего заданное значение tпп.
Исключение сигналов, длительность которых не превышает tпп, производится блоком 15 задержки. В тех системах контроля, в которых tпп≠0 требуемое значение задержки сигнала составляет, например, единицы или десятки секунд. Если, tпп=0, то блок 15 задержки необходим для исключения прохождения кратковременных импульсов при срабатывании компараторов. В этом случае, требуемое время задержки составляет доли секунды.
Выходные сигналы компаратора 11 и компаратора 12 поступают также на два входа элемента ИЛИ 13. "Лог.1" на выходе элемента ИЛИ 13 присутствует в случае срабатывания хотя бы одного из этих компараторов и является признаком того, что двигатель работает.
Дополнительным признаком неисправности тахометра является отсутствие при работающем двигателе сигнала на выходе следящего фильтра 21, управляемого частотным сигналом этого тахометра.
Отсутствие сигнала на выходе следящего фильтра 21 первого ротора и соответственно на выходе измерительной цепи 3 фиксируется компаратором 16, а отсутствие сигнала на выходе следящего фильтра 21 второго ротора и соответственно на выходе измерительной цепи 4 - компаратором 17.
Напряжение постоянного тока, пропорциональное текущему значению роторной вибрации, с выхода измерительной цепи 3 поступает на вход компаратора 16 (например, на инвертирующий вход микросхемы компаратора). Порог срабатывания компаратора 16 задан опорным напряжением (на неинвертирующем входе микросхемы), значение которого соответствует минимально возможному значению роторной вибрации работающего двигателя (например, 3 мм/с).
На выходе компаратора 16 "Лог.1" устанавливается тогда, когда значение напряжение постоянного тока на его входе меньше значения опорного напряжения. Этот сигнал присутствует на выходе компаратора 16, если двигатель не включен, а при работающем двигателе, если неисправен вибропреобразователь 1, или если неисправен тахометр первого ротора (т.е., если нет информативных сигналов на обоих или на одном из входов измерительной цепи 3).
Когда система контроля исправна и двигатель работает его роторная вибрация превышает минимальное значение, напряжение постоянного тока на выходе измерительной цепи 3 превышает значение опорного напряжения компаратора 16 и на его выходе устанавливается "Лог. 0".
Аналогично, "Лог.0" на выходе компаратора 17 устанавливается если двигатель работает и система контроля исправна, а "Лог.1" - если двигатель выключен или если неисправны вибропреобразователь 1 или тахометр второго ротора.
Таким образом, дополнительными признаками неисправности тахометров являются: при отказе тахометра первого ротора - "Лог.1" на выходе компаратора 16, при отказе тахометра второго ротора - "Лог.1" на выходе компаратора 17. Наличие (при работающем двигателе) сигналов "Лог.1" одновременно на выходах компаратора 16 и компаратора 17 свидетельствует о неисправности вибропреобразователя 1.
Анализ признаков отказа осуществляется тремя элементами И.
На три входа элемента И 18 поступают логические сигналы с выхода элемента ИЛИ 13, с выхода компаратора 16 и выхода блока задержки 15. При этом "Лог.1" на первом входе элемента 18 И является признаком рабочего состояния двигателя, "Лог. 1" на ее втором входе - признаком отказа вибропреобразователя 1 или тахометра первого ротора, "Лог.1" на третьем входе - признаком отказа тахометра первого ротора или тахометра второго ротора. При совпадении этих трех признаков на выходе элемента 18 И формируется сигнал "Лог.1", который свидетельствует об отказе системы контроля, наиболее вероятной причиной которого является неисправность в цепи тахометра первого ротора. С выхода элемента И 18 сигнал поступает на выход устройства "Отказ тахометра первого ротора".
Повышенная вероятность правильной локализации неисправности обеспечивается за счет того, что сигналы об отказе тахометра содержат два признака, формируемые независимыми цепями электронной части устройства (одни признак цепью: преобразователь 9 - компаратор 11 - элемент ИСКЛЮЧАЮЩЕЕ ИЛИ 14 - блок 15 задержки; второй признак; измерительная цепь 3 - компаратор 16).
Аналогично элемент 20 И формирует сигнал "Лог.1", свидетельствующий об отказе тахометра второго ротора. Сигнал "Лог.1" на выход устройства (отказ тахометра второго ротора поступает в том случае, если двигатель работает (присутствует сигнал "Лог.1" на выходе элемента ИЛИ 13) и зафиксированы два признака отказа этого тахометра ("Лог.1" на выходе компаратора 17 и "Лог.1" на выходе блока задержки 15).
Если при работающем двигателе сигналы отсутствуют как на выходе измерительной цепи 3, так и на выходе измерительной цепи 4, то "Лог.1" с выхода элемента ИЛИ 13, "Лог.1" с выхода компаратора 16 и "Лог.1" с выхода компаратора 17 поступают на три входа элемента И 19. При этом "Лог.1" с выхода этого элемента И поступает на выход устройства "Отказ вибропреобразователя".
В системе контроля с исправными датчиками признаки отказов отсутствуют и сигналы на выходах устройства "отказ тахометра первого ротора", "отказ вибропреобразователя", и "отказ тахометра второго ротора" соответствуют лог.0.
Устройство обеспечивает автоматический контроль функционирования вибропреобразователя и двух тахометров системы контроля вибрации в эксплуатации.
Использование устройства повышает достоверность контроля вибрации газотурбинного двигателя и позволяет снизить трудоемкость работ по техническому обслуживанию системы контроля.
Кроме того, сокращается время поиска неисправности и, соответственно, время вынужденного простоя объекта (например, самолета), и затраты на ремонт аппаратуры.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ СИГНАЛИЗАЦИИ ПРЕДЕЛЬНЫХ ПАРАМЕТРОВ ВИБРАЦИИ | 1992 |
|
RU2045751C1 |
| Способ контроля состояния подшипников качения и устройство для его осуществления | 1980 |
|
SU916999A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ТЕХНОЛОГИЧЕСКОГО ПАРАМЕТРА | 1990 |
|
RU1766190C |
| Способ контроля состояния подшипников качения и устройство для его осуществления | 1980 |
|
SU943549A1 |
| Электронный тахометр-сигнализатор | 1980 |
|
SU917085A1 |
| Цифровой ультразвуковой измеритель параметров вибрации | 2023 |
|
RU2807421C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ЗАЩИТЫ МАШИНЫ ПО ВИБРАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2067776C1 |
| Автоматическое устройство для регистрации частотных характеристик | 1980 |
|
SU1002849A1 |
| ВИБРОМЕТРИЧЕСКОЕ УСТРОЙСТВО ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ | 2006 |
|
RU2319210C1 |
| Устройство управления испытанием диагностикой подшипников | 1983 |
|
SU1140092A1 |
Использование: изобретение предназначено для контроля технического состояния газотурбинного двигателя по текущим значениям роторных составляющих вибрации двигателя. Сущность: устройство обеспечивает повышение достоверности контроля за счет организации функционального контроля работоспособности ее датчиков (вибропреобразователя и тахометров) с выявлением отказа и локализацией отказавшего элемента в течение минимального времени после возникновения неисправности. Указанное свойство устройства контроля достигнуто за счет введения дополнительных элементов: двух преобразователей частоты в напряжение 9, 10, двух компараторов 11, 12, элемента ИЛИ 13, элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 14, блока задержки 15 и трех элементов И 18, 19, 20. 1 ил.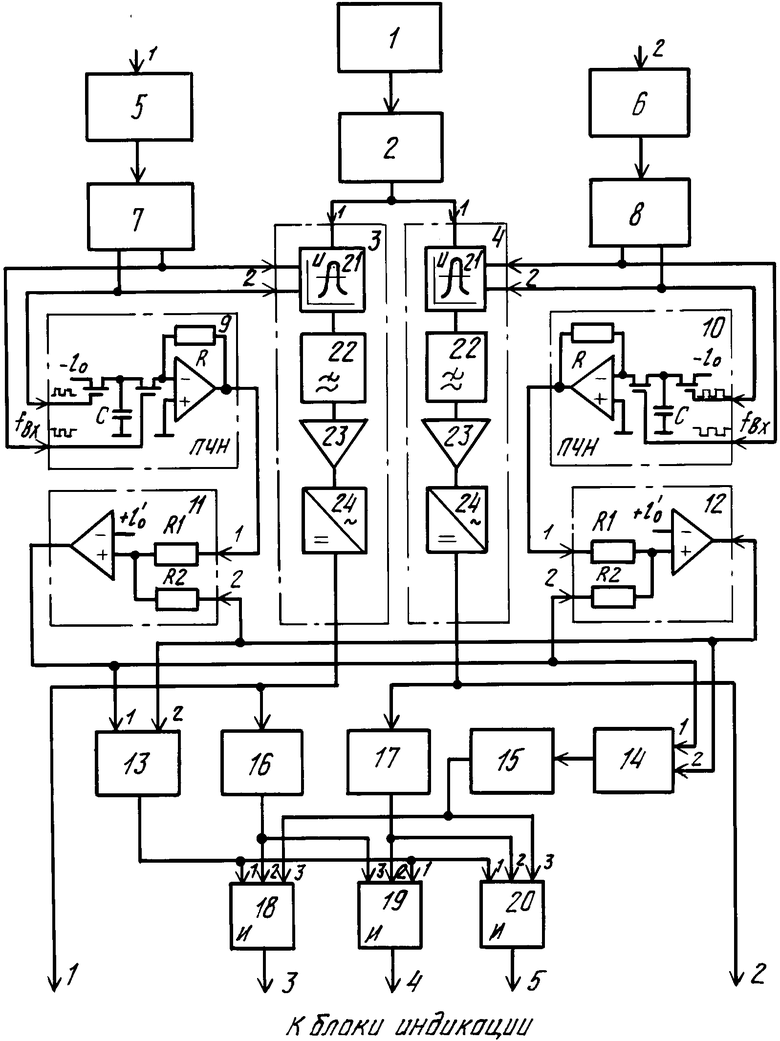
УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ВИБРАЦИИ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ, содержащее соединенные последовательно вибропреобразователь и согласующий блок и две измерительные цепи, первые входы которых подключены к выходу согласующего блока, а выходы являются соответственно первым и вторым выходами устройства, два формирователя опорных частот, входы которых являются соответственно первым и вторым частотными входами устройства, два коммутатора, входы которых подключены соответственно к выходам формирователей опорных частот, а выходы - к вторым входам измерительных цепей, и два компаратора, входы которых подключены соответственно к выходам измерительных цепей, отличающееся тем, что, с целью повышения достоверности контроля, оно дополнительно снабжено двумя преобразователями частоты в напряжение, третьим и четвертым компараторами, элементом ИЛИ, элементом ИСКЛЮЧАЮЩЕЕ ИЛИ, блоком задержки и тремя элементами И, входы преобразователей частоты в напряжение подключены соответственно к выходам коммутаторов, первые входы третьего и четвертого компараторов подключены соответственно к выходам преобразователей частоты в напряжение, второй вход третьего компаратора соединен с выходом четвертого компаратора, второй вход четвертого компаратора - с выходом третьего компаратора, выходы элементов И являются соответственно третьим, четвертым и пятым выходами устройства, выход третьего компаратора подключен к первым входам элемента ИЛИ и элемента ИСКЛЮЧАЮЩЕЕ ИЛИ, выход которого соединен с входом блока задержки, выход четвертого компаратора подключен к вторым входам элемента ИСКЛЮЧАЮЩЕЕ ИЛИ и элемента ИЛИ, выход последнего соединен с первыми входами трех элементов И, выход блока задержки подключен к третьим входам первого элемента И и третьего элемента И, выход первого компаратора - к второму входу первого элемента И и третьему входу второго элемента И, а выход второго компаратора - к вторым входам второго и третьего элементов И.
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Авторское свидетельство СССР N 1471825, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
