(54) СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ ПОД1ШШНИКОВ
КАЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля состояния подшипников качения и устройство для его осуществления | 1980 |
|
SU943549A1 |
| Способ контроля состояния подшипников качения в процессе эксплуатации и устройство для его реализации | 1978 |
|
SU771473A1 |
| СПОСОБ ДИАГНОСТИКИ ПОДШИПНИКОВ КАЧЕНИЯ ЗАХАРОВА - MDZ | 1996 |
|
RU2133455C1 |
| Способ контроля состояния подшипников качения в процессе эксплуатации и устройство для его осуществления | 1978 |
|
SU775650A1 |
| Способ контроля состояния подшипников качения и устройство для его осуществления | 1987 |
|
SU1418590A1 |
| Устройство для вибрационной диагностики состояния подшипников качения | 1981 |
|
SU987438A1 |
| Устройство для контроля состояния узлов трения качения | 1987 |
|
SU1423934A1 |
| СПОСОБ ДИАГНОСТИКИ ПОДШИПНИКОВ КАЧЕНИЯ | 1996 |
|
RU2133454C1 |
| Устройство для диагностики редуктора | 1990 |
|
SU1739242A1 |
| СЕНСОР ДИАГНОСТИКИ УЗЛОВ ТРЕНИЯ КАЧЕНИЯ | 1992 |
|
RU2036455C1 |
. - ,; л ;.;
Изобретение относится к вибрр-/ контрольной и измерительной техняке и может быть использовано при испмтаниях подшипников качения.; ;
Наиболее близким по технической су1чности к изобретению является способ Контроля состояния подшипников качения, заключающийся в том, что производят автонррмирование величины сигнала вибрации, выделяют из автонормированного сигнала составляющие амплитуд вибраций в полосе информативных частот и определяют состояние подшипника по величине вьаделенныХ составляю1чих амплитуд вибраций и частоте их значений Щ.
Способ осуществляют устройством для контроля состояния подшипников качения, содержащим последовательно соединенные вибропреобразователь, усилитель, блок автоиормирования и блок частотных фильтров, головной
;телефон, подключенные к нему последовательно блок аналогового Пересчета, режимный переключатель, генератор тока, усреднянячую цепь, логарифмический преобразователь и янг . дикатор СП.
Недостатком данного способа является, то, что он не позволяет производить контроль состояния подИйпtoников качения с различными типоразмерами и конструктивными параметрами, так как обладает неопределенностью при выборе области измери-. тельных частот..
15
Дель изобретения - расширение диапазона контролируемых типоразмеров подшипников качения.
Указанная цель достигается тем,
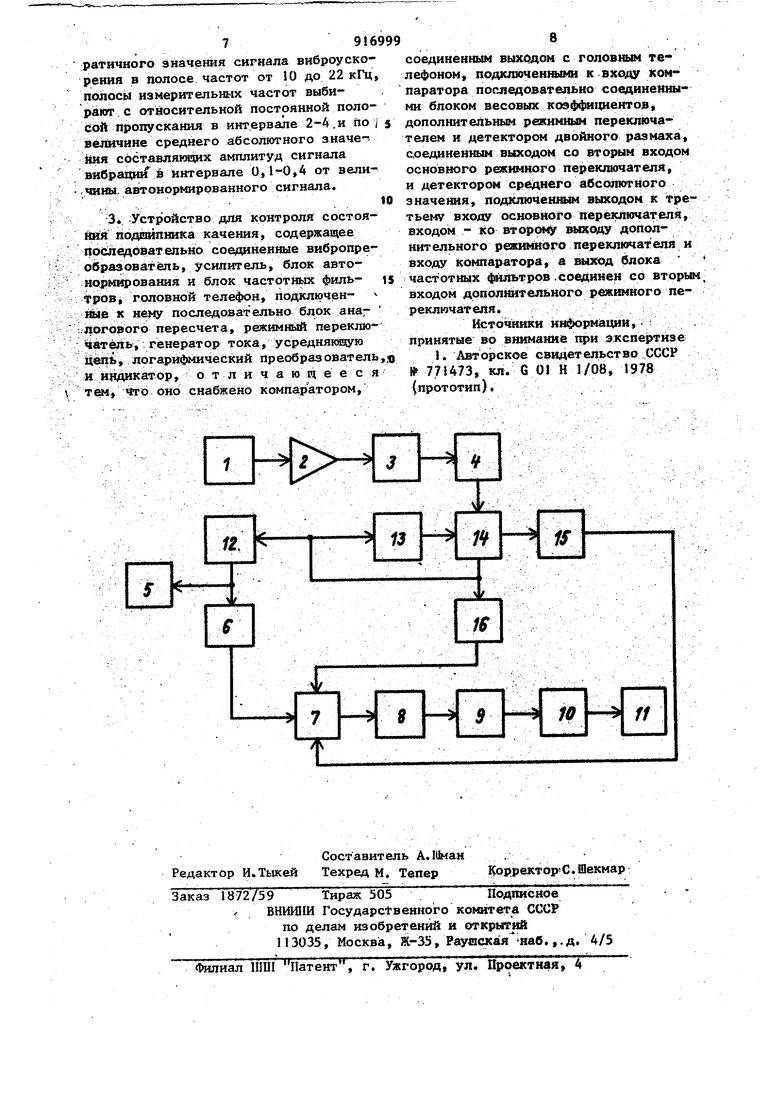
30 что перед определением состояния подшипника качения производят выбор полосы измерительных частот и умножают составляющие амплитуд виб-, раций на заданный весовой коэффициент, определяемый по формуле К {МФсг) , где Фда среднегеометрическое, значение полосы измерительных частот, кГц М(о,3-6,7)постоянньй множитель при среднегеометрическом значении полосы измерительных частот-j H(O,2-Oi) показатель степени при оп ределении значения весово го козффициента. Автонормирование выбирают по вели «чине, среднеквадратичного значения сигнала виброускорения в полосе за7 даншлх частот от 10 до 22 кГц, полосы измерительных частот выбирают с относительной постоянной полосой про пускания в интервале 2-4 и по величи не среднего абсолютного значения сос тавляющих амплитуд сигнала вибрации в интервале 0,1-0,4 от величины авто нормированного сигнала; Устройство для осуществления способа контроля состояния подшипников качения снабжено компаратором, соединенным выходом с головным телефоном, подключенными к входу компаратора последовательно соединенными блоком весовых коэффициентов, дополнительным режимным переключателем и детектором двойного размаха, соединеннь М выходом со вторым входом ос новного режимного переключателя, и детектором среднего абсолютного значения, подключенным выходом к третье му входу основного режимного переключателя, входом - ко второму выхо ду дополнительного режимного переклю чателя и входу компаратора, а выход блока частотных фильтров соединен со вторым входом дополнительного режимного переключателя. На чертеже изображена блок-схема устройства для осуществления способа Устройство содержит последователь но соединенные вибропреобразователь 1, усилитель 2, блок 3 автонормирова ния и блок 4 частотных фильтров, го ловной телефон 5, подключенные к нему последовательно блок 6 аналогового пересчета, основной режимный пере ключатель 7, генератор В тока, усред няющую цепь 9, логарифмический преобразователь 10, индикатор 11, компаратор 12, соединенный выходом с го ловным телефоном 5, последовательно соединенные блок 13 весовых коэффициентов, дополнительный режимны переклю чатель 14 и детектор 15 двойногв размаха, соединенный выходом со вторым входом основного режимного переключателя 7, и детектор 16 среднего абсолютного значения, подключенный выходом к третьему входу режимного переключателя 7, входом ко второму выходу дополнительного режимного переключателя 14 и входу компаратора 12, а выход блока 4 частотных фильтров соединен со вторьш входом дополнительного режимного переключат еля 1 4 , Сущность способа контроля состояния подшипников качения заключается в том, 1то производят автонормирование величины сигнала вибрации, выделяют из автонормированного сигнала составляющие амплитуд вибраций в полосе информативных.частот и определяют состояние подшипника по величине вы деленных составляющих амплитуд вибраций и частоте их значений, перед определением состояния подишпника качения производят выбор полосы измерительных частот и умножают составляющие амплитуд вибра1№й на весовой коэффициент К, определяемый по формуле: К«(МФсйД гйе Фсг среднегеометрическое значение полосы измерительных частот, кГц; М(0,3-0,7) - постоянный множитель при среднегеометрическом значении по. лосы измерительных част от-j Н(0,2-0,4) - показатель степени при определении значения весового коэффициента. Автонормиройание выбирают по величине, среднеквадратичного значения сигнала виброускорения в полосе заданных частот от )О до 22 кГц, полосы измерительных частот выбирают с относительной постоянной полосой пропускания в интервале 2-4 и по величине среднего абсолютного значения составляющих ампгаггуд сигнала вибрации в интервале 0,1-0,4 от величины автонормированного сигнала. Устройство, осуществляющее способ, работает следукйцим образом 5. Электрический сигнал вибропреобразователя 1 усиливается усилителеи 2 и нормируется блоком 3 автонормирования, затем поступает на вх блока 4 частотных фильтров. Блок 4 частотных фильтров выделяет частотные составляющие сигналы вибропреобразователя I в полосе информативных для усталости подшипника частот Bь дeлeнныe блоком 4 частотных фильтров амплитуды в выхода дополнитель ного режимного переключателя 14 под ются через детектор 15 двойного раз маха, основной режимный переключатель 7, генератор 8 тока, усредняющую цепь 9 и логарифмический преобразователь 10 на вход индикатора II. Показания последнего соответствуют средним абсолютным значениям вы деленным блоком 4 частотных фильтро амплитуд. Далее посредством изменений состояния режимного переключателя 14 выбирается полоса измерительных частот, которая определяется по заданному среднему абсолютному значению выделяемых блоком 4частотш 13 фильтров амплитуд. После выбора полосы измерителышх частот основной режимный переключатель 7 переводится во второе состояние. В данном случае, выделенные бло ком 4 частотных фильтров амплитуды в полосе измерительных частот через дополнительный режимный переключател 14 подаются на вход блока-13 весовых коэффициентов, где производится их умножение на заданные постоянHbie коэффиценты К. С выход аблока 13 весовых коэффициентов электрические сигналы через первый вход и первый :выход дополнительного режимного .переключателя 14 поступают на вход детектора 15 двойного размаха. G выхода детектора 15 двойного размаха электрический сигнал поступает через основной режимный переключатель i7, генератор 8 тока, усредняющую, цеп 9, логарифмический преобразователь 10 на вход индикатора 11. Показания, индикатора 11 соответствуют двойному размаху выделенных блоком 4 частотных фильтров амплитуд в полосе измерительных частот, с учетом заданного весового коэффициента К. Далее режимный переключатель 7 переводится в третье состояние. Выделенные блоком 4 частотных фильтров сигналы вибропреобразователя I в. 96 полосе измерительных частот через второй выход дополнительного режимного переключателя 14 и компаратор 12 поступают на вход блока 6 аналогового пересчета, затем через основной режимный переключатель 7, генератор 8 тока, усредняющую цепь 9 и логарифмический преобразовательно поступают на вход индикатора I1. В этом случае показания индикатора 11 соот-. ветствуют частоте следования амплитуд в измерительной полосе частот. Головной телефон 5 обеспечивает субъективное определение частоты и ритма амгшитуд в измерительной полосе частот. . . Предлагаемый способ и устройство для его осуществления позволяют рас ширить в несколькораз диапазон контролируемых типоразмеров подшипников качения. Формула изобретения 1. Способ контроля состояния подшипников качения, заключакицийся в TOMi что производят автонормирование величины сигнала вибрации, выделяют из автонормированного сигнала составляюгще амплитуд вибраций в полосе информативных частот и определяют состояние подшипника по величине выделенных составляющих амплитуд вибраций и частоте их значений, отличающийся тем, что, с целью расширения диапазона контролируемых типоразмеров подшипников, перед определением состояния подшипника качения производят выбор полосы измерительных частот и умножают составляющие амплитуд вибраций на весовой коэффициент, определяемый по формуле . х(мФ«Т, где Фс8 - среднегеометрическое значение полосы измерительных частот в кГц, М(0,3-0,7) - постоянный множитель при среднегеометрическом значении полосы измерительных частот; ) Н(0,2-0,4). - показатель степени при определении значения весового коэффициента. 2. Способ по п. 1, отличающийся тем, что автонормирова ние выбирают по величине среднеквад7916999
ратичного значения сигнала виброускорения в полосе частот от 10 до 22 кГц, полосы измерительных частот выби рают.с относительной постоянной полосой пропускания в интервале 2-4.н по j 5 величине среднего абсолютного значе- йия составляющих амплитуд сигнала вибрацшС 6 интервале ,А от величины. автонор шррванного сигнала.
, ;.- . 10
8
соединенным выходом с головным телефоном, подключеншлми к входу компаратора последовательно соединенными блоком весовых коэффшщентов, дополнительным режимным переключателем и детектором двойного размаха, соединенным выходом со вторым входом основного режимного переключателя, и детектором среднего абсолютного значения, подключенным выходом к Tjpeтьему ВХОДУ основного пере1спючателя, входом - ко второму выкоду дополнительного рвпюшбго переклкмателя и входу компаратора, а Ш1исод блока частотных фильтров .соединен со вторы входом дополнительного режимного переключателя.
Источники инфорМ ации,-
принятые во внимание при э:кспертйзе 1. Авторское свидетельство СССР 771473, кл. G 01 Н 1/08, 1978 (прототип),.i
