Изобретение относится к подшипниковой промышленности и может быть преимущественно использовано для контроля состояния пода1ипников качения.
Известен способ контроля состояния подшипников качения, заключающийся в том, что измеряют вибрацию враЩсшицегося подшипника, производят автонормирование величины сигнала вибрации, выделяют из него амплитуды составляющих в полосе информативных частот и определяют состояние подшипников по амплитудам и частотам выделенных составляющих 1.
Известно устройство для контроля состояния подшипников качения, содержащее последовательно соединенные вибропреобразователь, усилитель, блок автонормирования и блок частотных фильтров, блок аналогового пересчета, режимный переключатель, генератор, осредняющую цепь, логарифмический преобразователь, индикатор, а также наушник, вход которого соединен со входом блока аналогового пересчета (11.
Однако известные технические решения не позволяют производить испытания различных типоразмеров подшипников.
Цель изобретения - увеличение числа типоразмеров испытуемых подшипников.
Поставленная цель достигается за счет того, что способ контроля состояния подшипников качения заключа ется в том, что измеряют вибрацию вращающегося подшипника, производят
10 автонормирование величины сигнала вибрации, выделяют из него амплитуды составляющих в полосе информатив-. ных частот, производят выбор полосы измерительных частот, задаются весовым коэффициентс и умножают ам15плитуды составляющих на заданный вегсовой коэффициент и определяют состояние подшипников по амплитудам и частотам полученных составляю1дах.
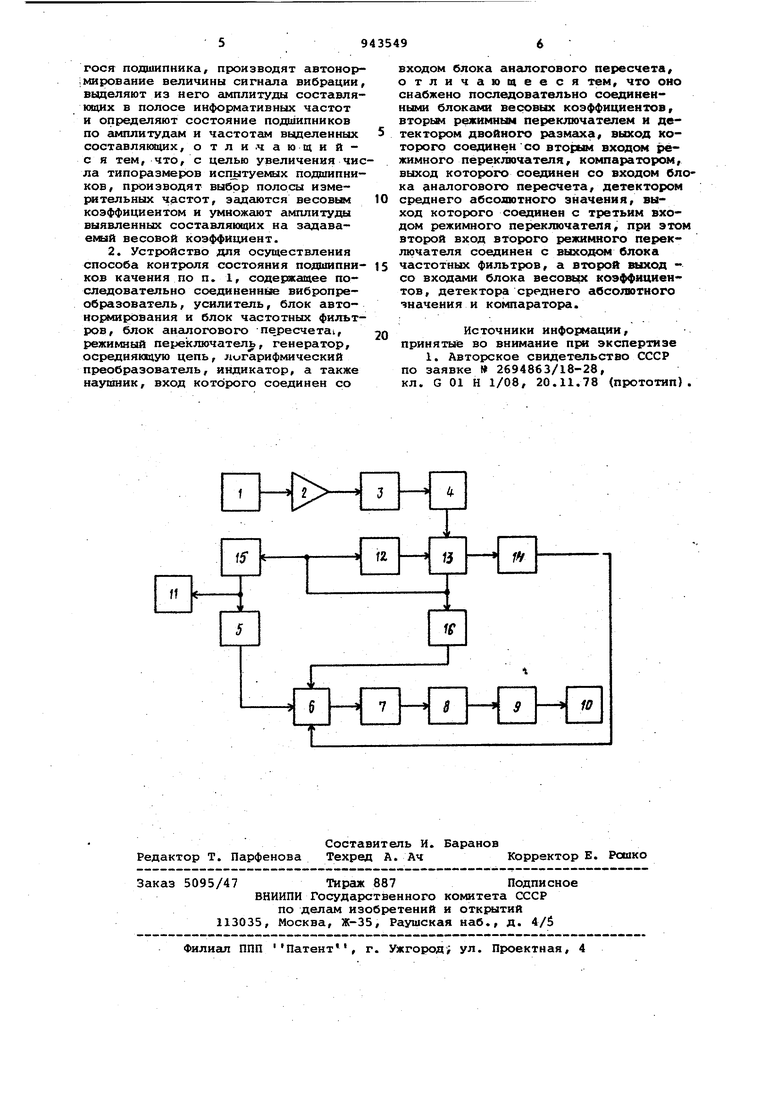
Устройство для осуществления спо20соба контроля состояния подшипников качения содержит последовательно соединенные вибропреобразователь, усилитель, блок автонормирования и блок частотных фильтров, блок анало25гового пересчета, режимный переключатель, генератор, осреднякаоую цепь, логари лический преобразователь, индикатор, а также-наушник, вход которого соединен со уходом блока анало30гового пересчета. Устройство снабжено также последовательно соединенными блоком весовых коэффициентов, вторым режимным переключателем и детектором двойного размаха, выход которого соединен со вторым входом режимного переключателя, компаратором, выход которого соединен со входом блока аналогового Пересчета, детектором среднего абсрлютного значения, выход которого соединен с треть им входом режимного переключателя, при этом второй вход второго режимного переключателя соединен с выхо(дом блока частотных фильтров, а второй выход со входами блока весовых коэффициентов, детектора среднего абсолютного значения и компаратора. На чертеже представлена блок-схема устройства для осуществления способа. Устройство содержит последовательно соединенные вибропреобразователь 1, усилитель 2, блок автонормирования 3 и блок частотных фильтров 4, блок аналогового пересчета 5, режимный переключатель б, генератор 7, осредняющую цепь 8, логарифмический преобразователь 9, индикатор 10, а также наушник Ц, вход которого соединен со входом блока аналогового пересчета 5. Устройство снабжено последовательно соединёнными блоком весовых коэффициентов 12, вторьлм переключателем 13 и детектором двойного размаха 14, выход которого соединен со вторым входом режимного переключателя б, компаратором 15, выход которого соединен со входом блока аналогового пересчета 5, детекторрм среднего абсолютного значения 16, вы ход которого соединен с третьим входом режимного переключателя в, при этом второй вход второго режимного переключателя 13 соединен с выходом блока частотных фильтров 4, а второй выход - со входами весовых коэффициентов 12, детектора среднего абсолютного значения 16 и компаратора 15 Способ осуществляется следующим образом. Электрический сигнал вибропреобра зователя 1 усиливается усилителем 2 И нормируется блоком автонормировани 3, затем поступает на вход блока час тотных фильтров 4. Блок частотных фильтров 4 выделяет частотные состав ляющие сигнала вибропреобразователя в полосе информативных для усталости подшипника частот. Выделенные блоком частотных фильтров 4 амплитуды с выхода режимного переключателя 13 подаются через детектор среднего абсолютного значения 15, режимный переключатель б, генератор тока 7, осредняющую цепь 8, логарифмический дреобразоЬатель 9 на вход стрелочно го индикатора 10, Показания последнего соответствует средним абсолютным значениям выделенных блоком частотных фильтров 4 амплитуд. Далее при помсяди изменений состояния режимного переключателя 13 выбирается полоса измерительных частот, Полоса измерительных частот определяется по заданному среднему абсоЛютному значению вьщеляемых блоком частотных фильтров 4 амплитуд. После выбора полосы измерительных частот режимный переключатель 6 переводится во второе состояние. В данном случае выделенные блоком частотных фильтров 4 амплитуды в полосе измери тельньюс частот через режимный переключатель 13 подаются на вход блока весовых коэффициентов 12, где производится их умножение на заданные постоянные коэффициенты. С выхода блока весовых коэффициентов 12 электрические сигналы через режимный переключатель 13 поступают на BXOJ детектора Двойного размаха 14. С выхода детектора ДВОЙНОГО размаха 14 его электрический сигнсШ поступает через режимный переключатель б, генератор тока 7, осредняющую цепь 8, логарифмический преобразователь 9 на вход стрелочного индикатора 10. Показания стрелочного индикатора 10 соответствуют двойному размаху вьаделенных блоком частотных фильтров 4 амплитуд в полосе измерительных частот, с учетом заданного весового коэффициента. Далее режимный переключатель б переводится в третье состояние. При этом, выделенные блоком частотных фильтров 4 амплитуды сигнала вибропреобразователя 1 в полосе измерительных частот через режимный переключатель 13 и компаратор 15 поступают на входы блока аналогового пересчета 5 и наушника 11. Сигнал блока аналогового пересчета 5 через режимный переключатель б, генератор тока 7, оЬредняющую цепь 8, логарифмический преобразователь 9 поступает на вход стрелочного индикатора 10. В данном случае показания стрелочного индикатора 10 соответствуют частоте следования амплитуд в измерительНой полосе частот. Наушник 11 обеспечивает субъективное определение частоты и ритма амплитуд в измерительной полосечастот. Предлагаемый способ и устройство для его осуществления позволяют увеличить в 2-3 раза число контролируемых типоразмеров подшипников качения. Формула изобретения 1. Способ контроля состояния подшипников качения, заключающийся в том, что измеряют вибрацию вращающегося подшипника, производят автонор ;мирование величины сигнала вибрации выделяют из него амплитуды составля ницих в полосе информативных частот и определяют состояние подшипников по амплитудам и частотам выделенных составлякяцих, oтли.чaющийc я тем, что, с целью увеличения чи ла типоразмеров испытуемых подашпников, производят шлбрр полосы измерительных частот, задаются весовьвл коэффициентом и умножают амплитуда выявленных составляющих на задаваемый весовой коэффициент. 2. Устройство для осуществления способа контроля состояния подишпни ков качения по п. 1, содержащее последовательно соединенные вибропреобразователь , усилитель, блок автонормирования и блок частотных фильтров г блок аналогового пересчета, режимный переключатель, генератор, осредняющую цепь, логарифмический преобразователь, индикатор, а также наушник, вход которого соединен со входом блока аналогового пересчета, отличающееся тем, что оно снабжено последовательно соединенными блоками весовых коэффициентов, вторым режимным переключателем и детектором двойного размаха, выход которого соединен со вторам входсж режимного переключателя, компаратором, выход которого соединен со входом блока аналогового пересчета, детектором среднего абсолютного значения, выход которого соединен с третьим входом режимного переключателя, при этом второй вход второго режимного переключателя соединен с выходе блока частотных фильтров, а второй выход со входами блока весош: коэффициентов, детектора среднего абсолютного значения и компаратора. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР по заявке 2694863/18-28, кл. G 01 Н 1/08, 20.11.78 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля состояния подшипников качения и устройство для его осуществления | 1980 |
|
SU916999A1 |
| Способ контроля состояния подшипников качения в процессе эксплуатации и устройство для его реализации | 1978 |
|
SU771473A1 |
| Способ контроля состояния подшипников качения в процессе эксплуатации и устройство для его осуществления | 1978 |
|
SU775650A1 |
| Способ контроля состояния подшипников качения и устройство для его осуществления | 1987 |
|
SU1418590A1 |
| Устройство для диагностики подшипников качения | 1990 |
|
SU1744561A1 |
| Устройство для контроля состояния узлов трения качения | 1987 |
|
SU1423934A1 |
| СЕНСОР ДЛЯ КОНТРОЛЯ И ДИАГНОСТИКИ СОСТОЯНИЯ ПОДШИПНИКОВ КАЧЕНИЯ | 1992 |
|
RU2036454C1 |
| Устройство для вибрационной диагностики остаточного ресурса подшипников качения | 1985 |
|
SU1295262A1 |
| Устройство для диагностики подшипниковых узлов механических систем | 1982 |
|
SU1021947A1 |
| Устройство для диагностики редуктора | 1990 |
|
SU1739242A1 |
