Изобретение относится к тепловой автоматике и точной механике, а именно к устройствам преобразования тепловой энергии в механическую энергию рабочих элементов, используемых в качестве датчиков, задатчиков, усилителей, генераторов, исполнительных механизмов при создании систем контроля и автоматического управления в схемах термоники - отрасли автоматики, решающей задачи контроля и управления при потреблении единственного вида энергии - тепловой.
В качестве аналога выбран пропорциональный регулятор температуры [1], который содержит источник электрического питания, включенные последовательно термочувствительный мост, основной усилитель, к выходу которого подключен нагреватель, разделительный конденсатор и дополнительный усилитель, а также содержит задатчик опорного напряжения, включенные последовательно и подключенные к выходу дополнительного усилителя амплитудный детектор, элемент сравнения, вторым входом связанный с выходом задатчика опоpного напряжения, и управляемый делитель напряжения, выход которого соединен с управляющим входом основного усилителя. Регулирующее воздействие вырабатывается за счет изменения амплитуды напряжения переключения на нагревателе по сигналу изменения напряжения термочувствительного моста, т.е. по отклонению температуры объекта от заданного значения.
Недостаток известного устройства заключается в его неработоспособности при отсутствии электрической энергии в проектируемой системе автоматического регулирования.
В качестве прототипа принят термонный регулятор интегрального принципа действия [2], который содержит нагреватель и холодильник, связанные с элементами регулятора через тепловые шины, измеритель регулируемой величины, задатчик, элемент сравнения, усилитель, выполненные в виде двух одинаковых газовых полостей, исполнительный механизм на базе сильфонного осциллятора, кондуктор элемента сравнения, два исполнительных сильфона, управляющих положением гибкого штока исполнительного механизма, преобразователь движения, причем все элементы регулятора выполнены на базе тепломеханических устройств с возможностью превращения тепловой энергии в механическую. Регулирующее воздействие вырабатывается по отклонению регулируемой величины от задания, т.е. при перемещении кондуктора элемента сравнения от первоначального среднего положения относительно двух газовых полостей за счет управления одним из исполнительных сильфонов гибким штоком исполнительного механизма, приводящим в действие преобразователь движения, связанный с регулирующим органом.
Недостаток известного устройства заключается в его непригодности для создания автоматических систем регулирования на промышленных объектах интегрального типа, так как в этом случае в системе возникают незатухающие колебания и система может вообще потерять устойчивость. Из-за инерционности объекта в системе на базе интегрального регулятора проходит определенный промежуток времени прежде чем регулирующий орган отклонится на величину, достаточную для ликвидации появившейся ошибки отклонения регулируемой величины от задания. Такое отклонение процесса изменения регулирующего воздействия от процесса изменения ошибки отклонения регулируемой величины от задания может привести к затяжным во времени переходным процессам в системе, что также является недостатком. Все это обуславливает низкую точность регулирования заданных параметров.
Добиться хорошего качества регулирования, в частности уменьшения времени переходного процесса и ликвидации статической ошибки регулирования без риска получения большого динамического заброса, в системе можно за счет применения пропорционально-интегрально-дифферен- циального закона регулирования. Однако регулятор с таким законом регулирования, которые могли бы нормально функционировать при отсутствии традиционных видов энергии (электрической, пневматической, гидравлической), в настоящее время нет.
Целью изобретения являются повышение быстродействия регулятора и уменьшение динамической ошибки в системе автоматического регулирования.
Цель достигается тем, что регулятор, содержащий задатчик регулируемого параметра, блок сравнения и усилитель, выполненные в виде смежных теплоизолированных по боковой поверхности и одному из торцов первой и второй газовых камер, другие торцы которых контактно связаны через кондуктор с измерителем регулируемого параметра и первой тепловой шиной, причем первая и вторая газовые камеры соединены гибкими газовыми каналами с оппозитно расположенными первым и вторым исполнительными сильфонами, подвижные торцы которых связаны через гибкий шток с сильфонным осциллятором исполнительного механизма интегрального действия, связанного с второй тепловой шиной, гибкий шток связан через преобразователь возвратно-поступательного движения во вращательное с регулирующим органом, а первая и вторая газовые камеры установлены с возможностью перемещения относительно кондуктора и снабжены указателем, связанным со шкалой задания регулируемого параметра, дополнительно содержит смежные теплоизолированные третью и четвертую газовые камеры, одни из торцов которых выполнены теплопроводными и соединены между собой через калиброванное тепловое сопротивление, причем теплопроводный торец четвертой газовой камеры контактно связан с кондуктором для подвода тепла и кондуктором для отвода тепла, которые разделены теплоизоляцией и жестко связаны с подвижными торцами соответственно первого и второго дополнительных сильфонов, кондуктор для отвода тепла снабжен ребрами охлаждения, а кондуктор для подвода тепла контактно связан с третьей тепловой шиной через последовательно расположенные первый концентратор тепла и первый подвижный кондуктор, третья и четвертая газовые камеры соединены гибкими газовыми каналами соответственно с оппозитно расположенными первым и вторым сильфонами обратной связи, подвижные торцы которых связаны с гибким штоком, а первый и второй дополнительные сильфоны соединены гибкими газовыми каналами соответственно со смежными теплоизолированными по боковой поверхности и одному из торцов пятой и шестой газовыми камерами, другие торцы которых выполнены в виде набора теплопроводных прокладок с возможностью изменения их количества, при этом наружные теплопроводные прокладки этих торцов контактно связаны через кондуктор обратной связи с последовательно расположенными вторым концентратором тепла и вторым подвижным кондуктором, контактно связанным с четвертой тепловой шиной, все тепловые шины связаны с источником тепла и холода, а выходной вал преобразователя вращательного движения в линейное связан через зубчатую передачу с рейкой, связанной с кондуктором обратной связи.
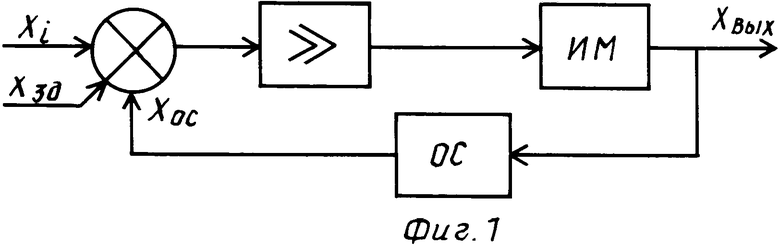
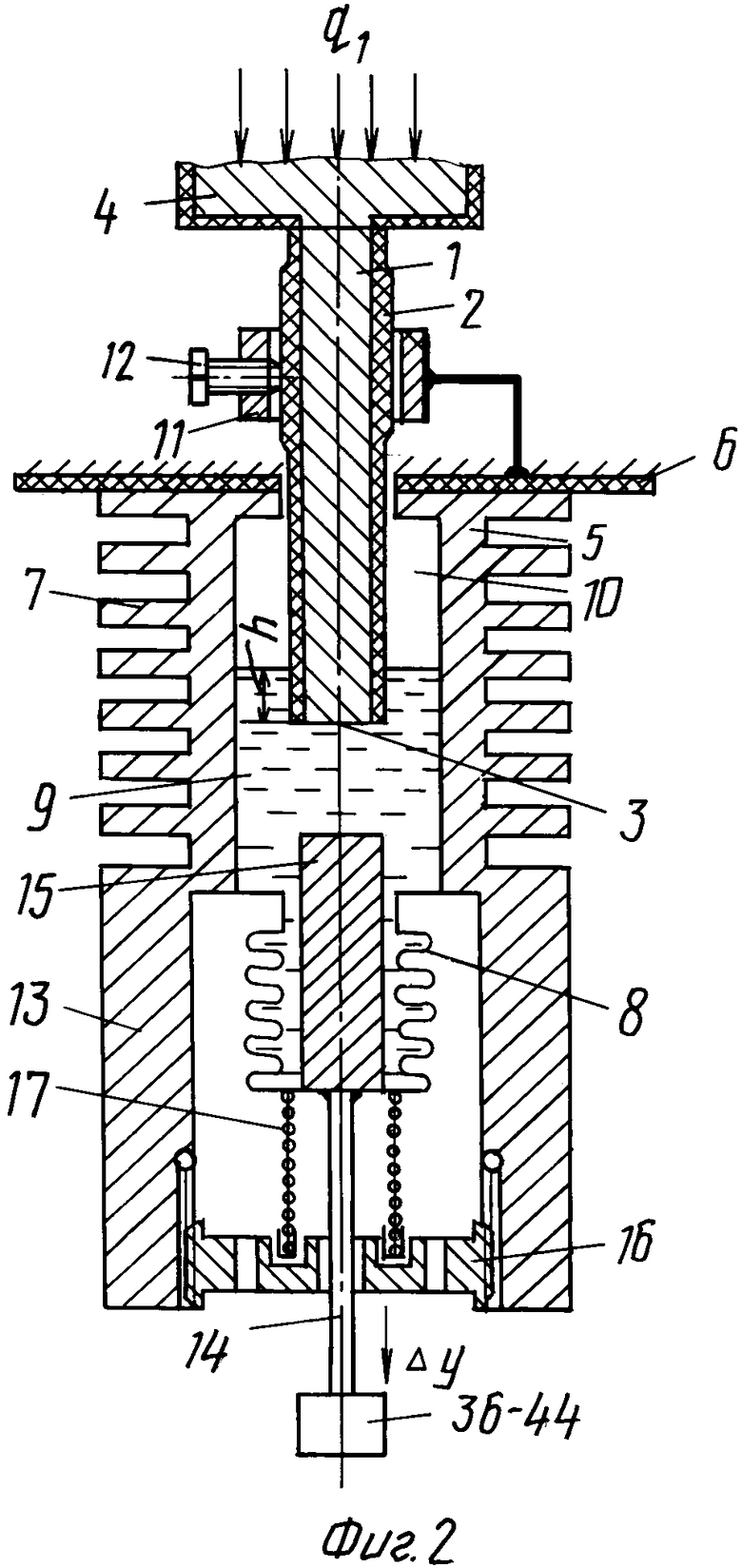
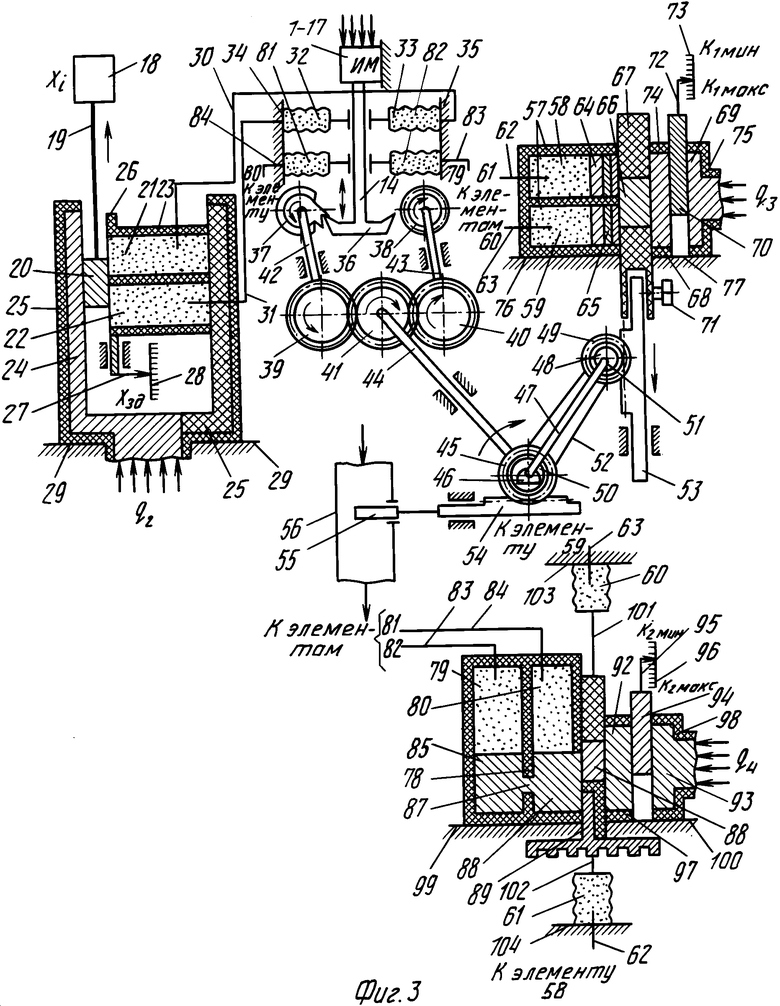
На фиг. 1 приведена структурная схема формирования пропорционально-интегрально-дифференциального закона регулирования с помощью звена обратной связи; на фиг.2 - конструкция исполнительного механизма интегрального действия; на фиг.3 - конструкция пропорционально-интегрально-дифференциального регулятора.
На фиг.1 обозначено: Xi - текущее значение регулируемой величины, Хзд - задание регулируемой величины, Хос - сигнал звена обратной связи, Хвых - регулирующее воздействие. Элемент сравнения определяет разницу между значениями Xi, Хзд, Хос, сигнал рассогласования поступает на вход усилителя, связанного с исполнительным механизмом (ИМ), на выходе которого получают регулирующее воздействие Хвых.
Исполнительный механизм (фиг.2) содержит стержень 1 с теплоизоляцией 2 боковой поверхности, кроме торца 3. Стержень 1 связан с нагревателем через тепловую шину 4. Цилиндрическая камера 5, закрепленная на основании 6 и выполненная как одно целое с ребрами 7 охлаждения, нижним своим основанием связана с сильфоном 8. Цилиндрическая камера 5 с сильфоном 8 частично заполнены жидкостью 9. В объеме цилиндрической камеры 5 над жидкостью 9 находится объем 10 паровоздушной смеси. Вертикальное положение стержня 1 в цилиндрической камере фиксируется с помощью муфты 11 и упорного винта 12. Внутри корпуса 13, выполненного как продолжение нижних ребер 7 охлаждения, размещен кроме сильфона 8 рабочий элемент 14, выполненный в виде гибкого штока. Внутри цилиндрической камеры 5 к нижнему основанию сильфона 8 прикреплена вставка 15 (припаяна, приклеена) с постоянным объемом. Нижняя часть корпуса 13 содержит гайку 16. Между гайкой 16 и сильфоном 8 размещена пружина 17.
Пропорцоинально-интегрально-диффе- ренциальный регулятор (фиг.3) содержит входную и выходную части, а также звено отрицательной обратной связи. Входная часть регулятора содержит измеритель 18 регулируемой величины Xi, связанный с регулятором через теплоизолированный стержень 19, на конце которого закреплен кондуктор 20 элемента сравнения. Задатчик, элемент сравнения и усилитель содержат две одинаковые и прилегающие друг к другу замкнутые газовые полости 21, 22 в виде параллелепипедов, боковая поверхность которых покрыта теплоизоляцией 23. Газовые полости 21, 22 с левой стороны контактируют с тепловой шиной 24 через кондуктор 20, а с правой стороны теплоизолированы и находятся в скользящем контакте с изолирующей стенкой 25. Внешние стороны шины 24 покрыты теплоизоляцией 25. Газовые полости 21, 22 закреплены на вертикальной платформе 26, снабженной указателем 27 задания регулируемой величины Хзд шкалой 28. Тепловая шина 24 закреплена на опорном элементе корпуса 29 регулятора. Газовые полости 21, 22 через гибкие газовые каналы 30, 31 связаны с исполнительными сильфонами 32, 33, закрепленными на опорных элементах 34, 35 корпуса регулятора.
Выходная часть регулятора содержит исполнительный механизм (1-17), связанный через гибкий шток 14 с преобразователем возвратно-поступательного движения во вращательное. Преобразователь возвратно-поступательного движения во вращательное содержит собачку 36 на гибком штоке 14, храповые колеса 37, 38, ведущие шестерни 39, 40, ведомую шестерню 41, валы 42, 43, 44 вращения. Выходной вал 44 вращения связан с преобразователем вращательного движения в линейное, который содержит ведущее зубчатое колесо 45 и подпятник 46 за колесом 45 на валу 44 вращения. На выступе вала 44 вращения после подпятника 46 закреплена поворотная серьга 47. Противоположный конец серьги 47 имеет отверстие с осью 48 ведомого зубчатого колеса 49. Ведущее 45 и ведомое 49 зубчатые колеса содержат соответственно ведущий 50 и ведомый 51 шкивы, связанные гибкой передачей 52. Ведомое зубчатое колесо 49 входит в зацепление с рейкой 53 обратной связи. Ведущее зубчатое колесо 45 через выходную рейку 54 связано с регулирующим органом 55 в трубопроводе 56.
Звено отрицательной обратной связи содержит замкнутую газовую полость, разделенную теплоизолятором 57 на два одинаковых газовых объема 58, 59, включенных по дифференциальной схеме с сильфонами 60, 61 через гибкие газовые каналы 62, 63. Теплопроводные наборные прокладки 64, 65 контактируют с кондуктором отрицательной обратной связи. Кондуктор обратной связи содержит в центре теплопроводящую часть 66, а по бокам теплоизоляторы 67. С правой стороны кондуктор контактирует с концентратором 68 тепла, связанным с тепловой шиной 69 через подвижный кондуктор 70. Кондуктор обратной связи закреплен на рейке 53 с помощью упорного винта 71. Подвижный кондуктор 70 содержит указатель 72 шкалы 73 с отметками значений коэффициента усиления К1. Все части газовых объемов 58, 59, кроме их торцов, поверхности концентратора 68 тепла и тепловой шины 69, кроме мест их контакта, покрыты соответственно теплоизоляцией 57, 74, 75. Газовые полости 58, 59, концентратор 68 тепла, тепловая шина 69 соответственно закреплены на опорных элементах 76, 77 регулятора. Элементы 57-77 образуют апериодическое звено первого порядка.
Реальное дифференцирующее звено цепи обратной связи содержит замкнутую газовую полость, разделенную теплоизолятором 78 на два одинаковых объема 79, 80, включенных по дифференциальной схеме с сильфонами 81, 82 обратной связи через гибкие газовые каналы 83, 84. Теплопроводные торцы 85, 86 разделены между собой калиброванным тепловым сопротивлением 87. Теплопроводник 86 контактирует с бикондуктором. Бикондуктор состоит из кондуктора 88 для подвода тепла и кондуктора 89 для отвода тепла. Между кондукторами 88, 89 и с верхней стороны кондуктора 88 расположена теплоизоляция 90. Кондуктор 89 выполнен в виде теплообменника с окружающей средой с ребрами 91 охлаждения. С правой стороны бикондуктор контактирует с концентратором 92 тепла, связанным с тепловой шиной 93 через подвижный кондуктор 94. Подвижный кондуктор 94 содержит указатель 95 шкалы 96 с отметками значений коэффициента усиления К2. Все части газовых объемов 79, 80, поверхности концентратора 92 тепла и тепловой шины 93, кроме мест их контакта, покрыты соответственно теплоизоляцией 78, 97, 98. Газовые полости 79, 80, концентратор 92 тепла, тепловая шина 93 соответственно закреплены на опорных элементах 99, 100 регулятора. Бикондуктор жестко связан через рычаги 101, 102 соответственно с сильфонами 60, 61, закрепленными на опорных элементах 103, 104 корпуса регулятора. Элементы 78-104 образуют реальное дифференцирующее звено.
Нагрев соответствующих тепломеханических элементов в регуляторе осуществляется с помощью подводимых по шинам тепловых потоков q1, q2, q3, q4- через тепловой контакт с окружающей средой (холодильник).
Работает исполнительный механизм (фиг.2) следующим образом.
С помощью муфты 11, упорного винта 12, а также пружины 17 и вставки 15 устанавливают требуемую величину заглубления стержня 1 в жидкости 9. Тем самым задают требуемую частоту возвратно-поступательных движений штока 14, т.е. заданное быстродействие исполнительного механизма.
Тепло, полученное стержнем 1 от нагревателя, через тепловую шину 4 идет на увеличение теплосодержания стержня 1 и передачу тепла через торец 3 к жидкости 9. Эффективный прогрев жидкости 9 в районе торца 3 приводит к испарению жидкости 9 и нагреву пара 10. В результате этого давление пара 10 в объеме над жидкостью 9 увеличивается и под его действием уровень жидкости 9 начинает уходить вниз, удаляясь от торца 3. Благодаря этому растягивается сильфон 8, совершая перемещение ΔY. Вместе с торцом сильфона 8 движется вниз и шток 14. При этом пружина 17 сжимается. Так как у пара незначительный коэффициент теплопроводности, то молекулы пара эффективно прогреваются лишь у сечения торца 3. Вследствие этого у основной массы пара начинается конденсация в объеме камеры 5. Тогда давление пара поднимается, перемещая вверх шток 14. В результате этого зеркало жидкости 9 занимает начальное положение, обеспечив тепловой контакт с торцом 3 стержня 1. Жидкость 9, прогреваясь, начинает снова испаряться и зеркало жидкости 9 уходит вниз. Вместе с этим растягивается сильфон 8, перемещающий вниз шток 14. Указанный процесс колебания уровня жидкости 9 в цилиндрической камере 5 периодически повторяется.
Таким образом, на выходе исполнительного механизма получают возвратно-поступательные движения штока 14. Это приводит в действие преобразователь возвратно-поступательного движения во вращательное 36-44 (фиг.3).
Возможность перемещения вставки 15 с постоянным объемом обеспечивает прямую зависимость между степенью заглубления h стержня 1 в жидкости 9 и величиной сжатия пружины 17, определяемой вращением гайки 16. Это позволяет задать точно требуемую частоту колебаний (возвратно-поступательных движений) гибкого штока 14, т.е. быстродействие исполнительного механизма. В частности, чем больше степень сжатия пружины 17, тем больше величина заглубления стержня 1 в жидкости 9 и тем большему количеству жидкости 9 стержень 1 отдает тепло. На прогрев и испарение жидкости 9 в этом случае затрачивается больше времени, что снижает частоту пульсаций штока 14, а значит, и быстродействие исполнительного механизма. При малых заглублениях h стержня 1 в жидкости 9, достигаемых за счет перемещений гайки16 вниз, скорость нагрева и испарения жидкости 9 увеличивается. Поэтому частота пульсаций штока 14, а значит, и быстродействие исполнительного механизма увеличиваются.
Входная часть регулятора работает следующим образом (фиг.3).
В состоянии равновесия кондуктор 20 элемента сравнения находится в среднем положении между замкнутыми газовыми полостями 21, 22, что означает равенство температур и давлений газа в этих полостях и отсутствие регулирующего воздействия, когда шток 14 исполнительного механизма находится в среднем нейтральном положении (одинаковые усилия со стороны сильфонов 32 и 33 на шток 14) и не входит во взаимодействие с преобразователем возвратно-поступательного движения во вращательное.
При отклонении регулируемой величины Xi от задания Хзд, т.е. при появлении сигнала небаланса ΔX = Xi - Хзд, в зависимости от знака этого небаланса стержень 19 перемещается вверх или вниз. Здесь регулируемая величина Xi (например, температура) преобразуется в линейное перемещение стержня 19. Например, стержень 19 перемещается вверх, вместе с ним перемещается кондуктор 20. При этом увеличивается площадь контакта кондуктора 20 с полостью 21 и уменьшается площадь контакта кондуктора 20 с полостью 22. Поскольку полости 21, 22 нагреваются через кондуктор 20, то температура и давление газа в полости 21 увеличиваются по сравнению с температурой и давлением газа в полости 22. Это вызывает увеличение объема сильфона 33 по сравнению с объемом сильфона 32. Свободный торец сильфона 33 перемещается влево. Это ведет к тому, что непрерывно совершающий возвратно-поступательные движения шток 14 перемещается влево и входит в зацепление с храповым колесом 37, что приводит в действие преобразователь движения.
Работает преобразователь возвратно-поступательного движения во вращательное следующим образом.
В зависимости от знака сигнала небаланса Δ Х возвратно-поступательное движение штока 14 с собачкой 36 сообщает возвратное движение одному из храповых колес 37, 43 (допустим храповому колесу 37). Собачка 36 поворачивает храповое колесо 37 вместе с валом 42 и шестерней 39 на число зубьев, соответствующее числу импульсов перемещений штока 14. В зависимости от знака сигнала небаланса ΔХ ведомая шестерня 41 вращается в ту или иную сторону (в рассматриваемом случае по часовой стрелке). Это приводит в действие преобразователь движения.
При вращении по часовой стрелке вала 44 вращаются в эту же сторону ведущее зубчатое колесо 45 и ведущий шкив 50. Вращение ведущего шкива 50 через гибкую передачу 52 передается ведомому шкиву 51 и ведомому зубчатому колесу 49, которые также начинают вращаться по часовой стрелке. Благодаря этому начинает перемещаться вниз рейка 53. Вращение ведущего зубчатого колеса 45 по часовой стрелке преобразуется в перемещение влево рейки 54, что приводит к закрытию проходного сечения трубопровода 56 регулирующим органом 55, т.е. к выработке регулирующего воздействия Хвых(t).
Известно, что для регуляторов непрямого действия, где коэффициент усиления прямого канала усилитель ошибки Xi - исполнительный механизм достаточно велик, а закон регулирования формируется с помощью звена обратной связи, справедливо соотношение
Wp(S)=  , (1) где S=
, (1) где S=  - оператор Лапласа;
- оператор Лапласа;
Wp(S) - передаточная функция всего регулятора;
Wос(S) - передаточная функция звена обратной связи.
Передаточная функция пропорционально-интегрально-дифференциального (ПИД) закона регулирования имеет следующий вид:
Wp(S) =  (S)=Kp+
(S)=Kp+  + TД·S, (2) где Кр - коэффициент усиления;
+ TД·S, (2) где Кр - коэффициент усиления;
Ти - постоянная времени интегрирования;
Тд - постоянная времени дифференцирования.
С учетом того, что формирование ПИД - закона регулирования происходит (см. фиг. 1) охватом усилителя и исполнительного механизма отрицательной обратной связью (ООС), а звено ООС представляет собой последовательное соединение апериодического звена первого порядка (3) с реальным дифференциальным звеном
(3) с реальным дифференциальным звеном , (4) где К1 и К2 - коэффициенты усиления соответствующих звеньев;
, (4) где К1 и К2 - коэффициенты усиления соответствующих звеньев;
Т1 и Т2 - постоянные времени соответствующих звеньев, передаточная функция звена ООС имеет вид ·
· , (5) где Кос = К1 ˙ К2.
, (5) где Кос = К1 ˙ К2.
С учетом формулы (1), имеют
Wp(S)=  =
=  =
=  =
=




 . (6)
. (6)
Из формулы (6) определяют параметры настройки регулятора

 (7)
(7)
Чтобы развязать параметры настройки Кр, Ти, Тд (сделать их взаимонезависимыми), оператор вначале задает определенную величину К1˙К2 = Кос = const.
Тогда при Кос = const T
T

 (8)
(8)
В соответствии с сущностью термонного регулятора апериодическое звено первого порядка с реальным дифференциальным звеном выполнены на базе тепломеханических элементов, которые образуют ООС (фиг.3, элементы 53, 57-77, 78-104).
Допустим, что в исходный момент времени (момент равновесия) площадь контакта теплопроводника 66 с теплопроводником 64 и соответствующая площадь контакта с теплопроводником 65 одинаковы, что обуславливает одинаковую температуру теплопроводников 64, 65 и, следовательно, одинаковые значения температуры и давления газа в объемах 58, 59 (рассматриваемый режим соответствует 50% открыванию заслонки 55 в трубопроводе 56). Тепло от шины 69 идет через подвижный кондуктор 70, концентратор 68 тепла и теплопроводник 66 на нагрев теплопроводников 64, 65.
Площадь контакта теплопроводника 86 с кондуктором 88 для подвода тепла и соответствующая площадь с кондуктором 89 для отвода тепла равны, что обуславливает одинаковую температуру теплопроводников 85, 86 и, следовательно, одинаковые значения температуры и давления газа в объемах 79, 80. Тепло от шины 93 идет через подвижный кондуктор 94, концентратор 92 тепла и кондуктор 88 для подвода тепла на нагрев теплопроводников 85, 86.
В динамике для рассматриваемого случая отклонения ΔX = Xi - Xзд(фиг.3) рейка 53 перемещается вниз и вместе с ней движется кондуктор 66, 67. В результате этого площадь теплопроводника 66 с теплопроводником 64 уменьшается и увеличивается площадь контакта теплопроводника 66 с теплопроводником 65. Благодаря этому увеличиваются температура и давление газа в объеме 59 по сравнению с температурой и давлением газа в объеме 58. Появление разности температур и давлений газа в объемах 58, 59 ведет к тому, что давление газа в сильфоне 60 и, следовательно, усилие, развиваемое им, становятся больше, чем давление газа в сильфоне 61 и усилие, развиваемое этим сильфоном. В результате бикондуктор 88, 89 начинает перемещаться вниз, увеличивая площадь контакта теплопроводника 86 с кондуктором 88 для подвода тепла и уменьшая соответствующую площадь контакта с кондуктором 89 для отвода тепла. Так как теплопроводники 88, 89 разделены между собой калиброванным тепловым сопротивлением 87 и площади контакта теплопроводника 86 с кондукторами 88, 89 не равны между собой, то температура теплопроводника 86 увеличивается по сравнению с температурой теплопроводника 85. В результате этого увеличиваются температура и давление газа в объеме 80 по сравнению с температурой и давлением газа в объеме 79. Появление разности температур, давлений газа в объема 79, 80, ведет к тому, что давление газа в сильфоне 81 и, следовательно, усилие, развиваемое им, становятся больше, чем давление газа в сильфоне 82 и усилие, развиваемое этим сильфоном.
Однако указанные изменения температур и давлений газа в объемах 58, 59, а следовательно, и давлений газа в сильфонах 60, 61, а также изменения температур и давлений газа в объемах 79, 80, а следовательно, и давлений газа в сильфонах 81, 82 происходят не мгновенно (после перемещения кондуктора 66, 67), а спустя некоторое время, зависящее от постоянных времени Т1 = Тд ˙ Кос, Т2 = Ти/Кос.
ПИД-закон регулирования, реализованный в рассматриваемом регуляторе, можно выразить не только через передаточную функцию (формула 2), но и через оригиналы входной и выходной величин регулятора:
Xвых(t)=Kp·ΔX(t)+
 X(t)dt+T
X(t)dt+T . (9)
. (9)
Из уравнения (9) следует, что перемещение реек 53, 54 - Хвых(t), обусловленное действием дифференцирующей части регулятора, тем больше, чем больше величина Тд, т. е. чем больше масса прокладок 64, 65. Чем больше постоянная времени Т1 = Тд ˙ Кос, тем позже прогревается в рассматриваемом случае газ в объеме 59 и позже происходят увеличение давления газа в этом объеме и перемещение сильфона 60, тем позже происходят появление разности температур и давлений газа в объемах 79, 80 и перемещение сильфона 81 вправо. Таким образом, отключающая обратная связь срабатывает тем позже, чем больше тепловая инерция прокладок 64, 65. А это значит, что под действием ошибки рассогласования ΔX(t) и превалирующего усилия сильфона 33 гибкий шток 14 с собачкой 36 дольше находятся в зацеплении с храповым колесом 37 и вращают вал 44. Это вызывает дополнительное перемещение рейки 54 - Хвых(t), пропорциональное времени задержки отключающего действия обратной связи, т.е. постоянной времени Тд = Т1/Кос.
Уменьшение постоянной времени дифференцирования Тд достигается уменьшением числа прокладок 64, 65, т.е. уменьшением их тепловой инерции (постоянной времени Т1). Это физически означает срабатывание отключающей обратной связи в течение малого промежутка времени, т.е. сильфон 81 в этом случае быстро отводит шток 14 и собачку 36 от храпового колеса 37. В результате этого дифференцирующая часть регулирующего воздействия Xвых(t) ∞ T (см. формулу 9) в рассматриваемом случае меньше из-за малого значения величины Тд
(см. формулу 9) в рассматриваемом случае меньше из-за малого значения величины Тд Т1.
Т1.
Перемещение рейки 54 Хвых(t) также определяется действием интегрирующей части регулятора, определяемой постоянной времени Ти = Т2˙Kос реального дифференциального звена. Постоянная времени интегрирования
Ти = Тв, где Тв - время выравнивания температур теплопроводников 85, 86 через калиброванное сопротивление 87:
Тв = 1/f = R, где R - величина теплового сопротивления 87, определяемая площадью сечения f этого калиброванного сопротивления. Площадь сечения сопротивления 87 выбирается оператором изменением величины теплоизоляционных вставок 78.
Таким образом, из формулы (9) видно, что предложенный регулятор работает как пропорциональный, если Tи_→ max, а 1/Tи_→ 0 . Физически это означает, что значение Ти тем больше, чем больше величина Тв, т.е. чем меньше площадь сечения f сопротивления 87. Интегральная составляющая предложенного регулятора при этом настолько мала из-за Tи->>max, что понадобится гораздо больше времени для выравнивания температур теплопроводников 85, 86, а значит, и давлений газа в объемах 79, 80. Тогда усилия, развиваемые сильфонами 33, 81, дольше уравновешиваются и шток 14 дольше находится в нейтральном положении между храповыми колесами 37, 38, что снижает регулирующее воздействие Хвых(t).
Уменьшают значение Ти путем уменьшения Тв, увеличивая площадь сечения сопротивления 87. При этом чем меньше времени понадобится для выравнивания температур теплопроводников 85, 86, тем меньше времени усилие, развиваемое сильфоном 33, уравновешивается усилием, развиваемым сильфоном 81, тем меньше времени шток 14 находится в нейтральном положении между храповыми колесами 37, 38, т.е. шток 14 быстрее входит в зацепление с одним из храповых колес 37, 38, и увеличивает регулирующее воздействие Хвых(t).
Новое установившееся состояние (положение равновесия) наступает в системе, когда результирующее воздействие на шток 14 со стороны сильфонов 81, 82 цепи обратной связи уравновешивается результирующим действием на шток 14 сильфонов 32, 33 входной части регулятора. В положении равновесия шток 14 занимает нейтральное положение, вал 44, рейки 53, 54 неподвижны, а в системе текущее значение регулируемой величины Xi равно заданию Хзд, т.е. ΔX(t) = Xi (t = ∞) - Xзд = 0. Таким образом, в предлагаемом регуляторе отсутствует статическая ошибка. Объясняется это следующим образом.
Так как между теплопроводниками 85, 86 существует тепловое калиброванное сопротивление 87, то при любом положении бикондуктора 88, 89 относительно теплопроводника 86, т.е. при любом соотношении между площадями контакта кондукторов 88, 89 с теплопроводником 86, происходит с течением времени выравнивание температур теплопроводников 85, 86, а следовательно, и выравнивание температур и давлений газа в объемах 79, 80, а также усилий, развиваемых сильфонами 81, 82. Это позволяет под действием остаточной ошибки на входе регулятора Δ X(t) = Xi - Xзд ≠0 штоку 14 опять войти в зацепление с одним из храповых колес 37, 38 (определяемых знаком ошибки). Таким образом, процесс отработки регулятором отклонения регулируемой величины Xi от задания Хздпродолжается до тех пор, пока величина Xi станет равной Хзд и кондуктор 20 обязательно займет среднее положение между полостями 21, 22 и температура давления газа в этих полостях станут одинаковыми. При этом усилия, развиваемые сильфонами 32, 33, также уравновешиваются.
В предлагаемой конструкции регулятора уменьшение уровня сигнала обратной связи в апериодическом звене первого порядка 57-77, т.е. величины К1, достигается за счет уменьшения теплового потока q3, поступающего от тепловой шины 69 в концентратор 68 и, следовательно, в кондуктор 66, 67, теплопроводники 64, 65 и затем в газовые объемы 58, 59. Уровень теплового потока q3 устанавливается с помощью подвижного кондуктора 70. В частности, уменьшение теплового потока q3 достигается выводом кондуктора 70 из зазора между элементами 68, 69 вверх. Вследствие этого понижается температурный уровень в газовых объемах 58, 59 и снижается разность давлений газа в этих объемах, что обуславливает небольшое результирующее усилие, развиваемое сильфонами 60, 61 при их воздействии на бикондуктор 88, 89.
Уменьшение уровня сигнала обратной связи в реальном дифференциальном звене 79-100, т. е. величины К2, достигается за счет уменьшения теплового потока q4, поступающего от тепловой шины 93 в концентратор 92 и, следовательно, в кондуктор 88, теплопроводники 85, 86 и затем в газовые объемы 79, 80. Уровень теплового потока q4устанавливается с помощью подвижного кондуктора 94. В частности, уменьшение теплового потока q4 достигается перемещением вверх кондуктора 94. Вследствие этого понижается температурный уровень в газовых объемах 79, 80 и снижается разность давлений газа в этих объемах, что обуславливает небольшое результирующее усилие, развиваемое сильфонами 81, 82 при их воздействии на шток 14. По указанной причине равновесие в системе достигается при таком же небольшом результирующем оппозитном усилии со стороны сильфонов 32, 33, воздействующих на шток 14. Последнее означает, что требуется (или устанавливается) небольшая разность давлений газа в полостях 21, 22, чтобы развить это малое усилие с помощью сильфонов 32, 33. Это возможно, если текущее значение Xi не намного отличается от Хзд, т.е. при незначительном отклонении кондуктора 20 относительно разделительной стенки 23, теплоизолятора между полостями 21, 22. Иными словами, перемещая кондукторы 70, 94 вверх, т.е. уменьшая значения К1, К2, уменьшают угол наклона статической характеристики пропорциональной части пропорционально-интегрально-дифференциального регулятора и увеличивают Кр, и наоборот, перемещая кондукторы 70, 94 вниз, увеличивают угол наклона статической характеристики и уменьшают величину коэффициента Кр.
Испытания термонного регулятора подтвердили его эксплуатационную надежность, высокую точность регулирования заданных параметров и простоту конструкции.
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор с использованием тепловой энергии | 1990 |
|
SU1774316A2 |
| Регулятор с использованием тепловой энергии | 1989 |
|
SU1711115A2 |
| Регулятор с использованием тепловой энергии | 1987 |
|
SU1619228A1 |
| Регулятор с использованием тепловой энергии | 1988 |
|
SU1711128A2 |
| Тепловой привод | 1986 |
|
SU1404683A1 |
| АМОРТИЗАТОР С ВЫСОКОЙ ГАСЯЩЕЙ СПОСОБНОСТЬЮ | 2001 |
|
RU2248478C2 |
| АМОРТИЗАТОР С ПОВЫШЕННОЙ ДИССИПАТИВНОЙ СПОСОБНОСТЬЮ И ПРАКТИЧЕСКИ БЕЗ МАСЛА | 2011 |
|
RU2547023C2 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ТЕПЛОВОГО РЕЖИМА АККУМУЛЯТОРА И ИЗМЕРЕНИЯ МОЩНОСТИ ЕГО ТЕПЛОВЫДЕЛЕНИЯ | 2011 |
|
RU2472258C1 |
| Тепловой привод | 1980 |
|
SU1000589A2 |
| СИЛОВАЯ УСТАНОВКА | 1989 |
|
RU2029880C1 |
Изобретение относится к термонике - области автоматики, решающей задачи контроля и управления при потреблении единственного вида энергии - тепловой. Техническим преимуществом изобретения по сравнению с прототипом является повышение быстродействия регулятора и его точности за счет минимизации динамической ошибки. Регулятор содержит задатчик регулируемого параметра, блок сравнения и усилитель, выполненные в виде первой и второй газовых камер, одни из торцов которых контактно связаны через кондуктор с измерителем регулируемого параметра и первой тепловой шиной, оппозитно расположенные первый и второй исполнительные сильфоны и первый и второй сильфоны обратной связи, а также первый и второй дополнительные сильфоны, третью и четвертую газовые камеры с теплопроводными торцами, соединенными через калиброванное тепловое сопротивление, и пятую и шестую газовые камеры, одни из торцов которых выполнены в виде набора теплопроводных прокладок. Первая и вторая газовые камеры сообщены с первым и вторым исполнительными сильфонами, а третья и четвертая газовые камеры сообщены с первым и вторым сильфонами обратной связи. Подвижные торцы сильфонов связаны через гибкий шток с сильфоном сильфонного осциллятора исполнительного механизма интегрального действия, связанного с второй тепловой шиной, а шток связан с преобразователем возвратно-поступательного движения во вращательное, выходной вал которого связан через зубчатую передачу с первой рейкой и второй рейкой, связанной с регулирующим органом. Теплопроводный торец четвертой газовой камеры контактно связан с кондуктором для подвода тепла и кондуктором для отвода тепла, которые жестко связаны с подвижными торцами дополнительных сильфонов. Кондуктор для подвода тепла контактно связан через первый концентратор тепла с первым подвижным кондуктором, контактно связанным с третьей тепловой шиной, а наружные теплопроводные прокладки соответствующих торцов газовых камер контактно связаны с кондуктором обратной связи, соединенным с первой рейкой и контактно связанным через второй концентратор тепла с вторым подвижным кондуктором, который контактно связан с четвертой тепловой шиной. Все тепловые шины связаны с источниками тепла и холода. 3 ил.
ТЕРМОННЫЙ РЕГУЛЯТОР, содержащий задатчик регулируемого параметра, блок сравнения и усилитель, выполненные в виде смежных теплоизолированных по боковой поверхности и одному из торцов первой и второй газовых камер, другие торцы которых контактно связаны через кондуктор с измерителем регулируемого параметра и первой тепловой шиной, причем первая и вторая газовые камеры соединены гибкими газовыми каналами с оппозитно расположенными первым и вторым исполнительными сильфонами, подвижные торцы которых связаны через гибкий шток с сильфонным осциллятором исполнительного механизма интегрального действия, связанного с второй тепловой шиной, гибкий шток связан через преобразователь возвратно-поступательного движения во вращательное с регулирующим органом, а первая и вторая газовые камеры установлены с возможностью перемещения относительно кондуктора и снабжены указателем, связанным со шкалой задания регулируемого параметра, отличающийся тем, что он содержит смежные теплоизолированные третью и четвертую газовые камеры, одни из торцов которых выполнены теплопроводными и соединены между собой через калиброванное тепловое сопротивление, причем теплопроводный торец четвертой газовой камеры контактно связан с кондуктором для подвода тепла и кондуктором для отвода тепла, которые разделены теплоизоляцией и жестко связаны с подвижными торцами соответственно первого и второго дополнительных сильфонов, кондуктор для отвода тепла снабжен ребрами охлаждения, а кондуктор для подвода тепла контактно связан с третьей тепловой шиной через последовательно расположенные первый концентратор тепла и первый подвижный кондуктор, третья и четвертая газовые камеры соединены гибкими газовыми каналами соответственно с оппозитно расположенными первым и вторым сильфонами обратной связи, подвижные торцы которых связаны с гибким штоком, а первый и второй дополнительные сильфоны соединены гибкими газовыми каналами соответственно со смежными теплоизолированными по боковой поверхности и одному из торцов пятой и шестой газовыми камерами, другие торцы которых выполнены в виде набора теплопроводных прокладок с возможностью изменения их количества, при этом наружные теплопроводные прокладки этих торцов контактно связаны через кондуктор обратной связи с последовательно расположенными вторыми концентратором тепла и подвижным кондуктором, контактно связанным с четвертой тепловой шиной, все тепловые шины связаны с источниками тепла и холода, а выходной вал преобразователя возвратно-поступательного движения во вращательное связан через зубчатую передачу с рейкой, связанной с кондуктором обратной связи.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Регулятор с использованием тепловой энергии | 1987 |
|
SU1619228A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
