Изобретение относится к электрическим машинам, точнее к линейным асинхронным двигателям, конкретно к линейным однофазным двигателям.
Известно устройство, в котором перевод подвижного элемента линейного синхронного двигателя с одного на другой путь производится с помощью стрелок, которая имеет несколько промежуточных опор. На этих опорах стрелка плавно изгибается от одного до другого участка пути.
Недостатком известного изобретения является сложность и пониженная надежность стрелочного перевода.
Наиболее близкой по технической сущности к предлагаемому устройству является комбинированная система левитации и тяги на однофазном токе, состоящая из первичного элемента, выполненного в виде обмотки возбуждения, и безобмоточного вторичного элемента, обмотка возбуждения выполнена из катушек индуктивности, каждая из которых расположена на подвижной части установки в направлении продольной оси установки в один ряд на расстоянии полюсного деления друг относительно друга, катушки индуктивности соединены так, что образуют переменно-полюсную магнитную систему, обмотка возбуждения имеет клеммы для подключения к источнику однофазного тока, безобмоточный вторичный элемент выполнен в виде пластины из немагнитного металла, скреплен с основанием пути, подвижная часть установки имеет возможность перемещения вдоль всей длины неподвижной части [2].
Недостатком известного изобретения является невозможность перехода подвижной части установки с одного на другой путь.
Целью изобретения является создание возможности бесстрелочного перевода подвижной части установки с одного на другой путь.
Достигается это тем, что устройство для левитации и тяги на однофазном токе, содержащее закрепленный на корпусе подвижной части первичный элемент, выполненный в виде обмотки возбуждения, имеющий,по меньшей мере, четыре эллипсовидные катушки индуктивности, расположенные вдоль корпуса подвижной части в один ряд на расстоянии друг от друга, равном полюсному делению с размещением меньшей оси на продольной оси корпуса подвижной части, соединенные между собой с образованием переменно-полюсной магнитной системы и имеющие выводы для подключения к источнику питания однофазного тока, и корпуса, в которых они закреплены жестко, а на пути установлен безобмоточный вторичный элемент, выполненный в виде пластины из немагнитного материала, жестко связанной с основанием пути и взаимодействующей с катушками индуктивности, отличающееся тем, что оно снабжено установленными на подвижной части регуляторами тока и приводами, каждый из которых выполнен из двух подвижных относительно друг друга частей, одна из которых жестко соединена с корпусом подвижной части, а другая - с корпусом соответствующей катушки индуктивности для поворота его вокруг вертикальной оси относительно корпуса подвижной части, причем приводы соединены с одними регуляторами тока, а другие регуляторы тока включены между источником питания однофазного тока и соответствующими катушками индуктивности.
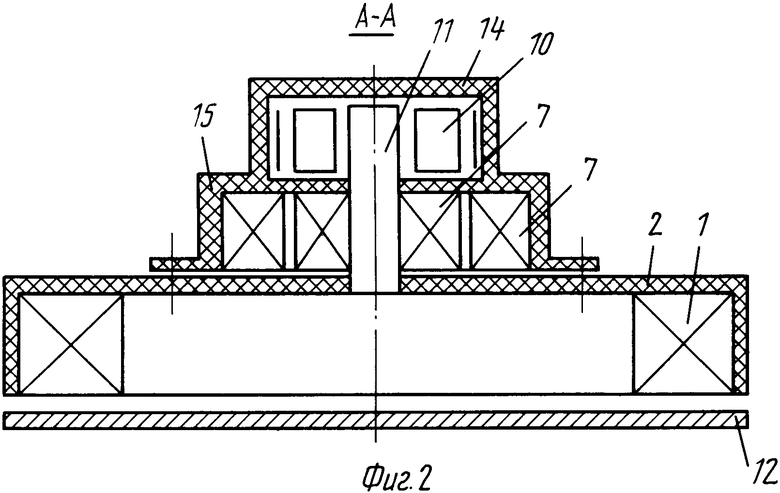
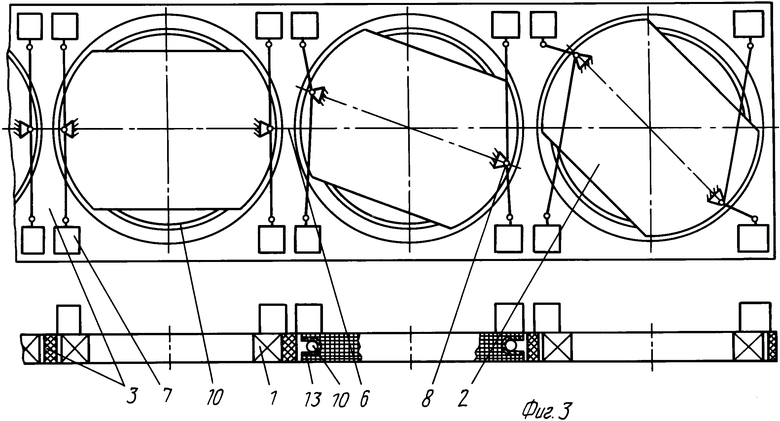
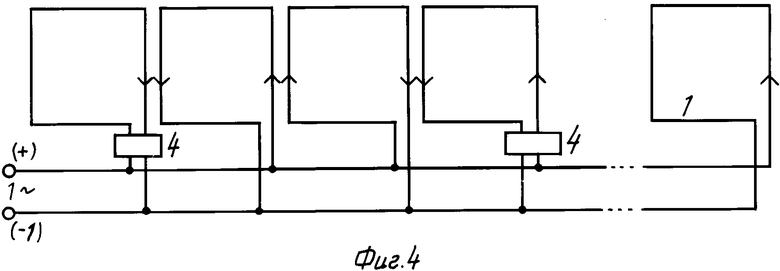
На фиг. 1 приведена принципиальная схема устройства для левитации и тяги на однофазном токе, у которого две катушки индуктивности, расположенные в начале и конце подвижной части устройства, выполнены с возможностью вращения вокруг вертикальной оси относительно корпуса подвижной части. Привод катушки индуктивности размещен в центре корпуса катушки индуктивности; на фиг. 2 - сечение устройства для левитации и тяги на однофазном токе по А-А на фиг. 1; на фиг. 3 - принципиальная схема устройства для левитации и тяги на однофазном токе, у которого все катушки индуктивности выполнены с возможностью вращения вокруг вертикальной оси относительно корпуса подвижной части. Привод катушки индуктивности расположен на корпусе подвижной части устройства, соединен с опорой корпуса катушки индуктивности, размещенной на его периферийной части; на фиг. 4 - электрическая схема подсоединения катушек индуктивности к источнику однофазного тока (параллельное подключение катушек индуктивности к источнику тока) и к регуляторам тока.
Устройство для левитации и тяги на однофазном токе состоит из первичного элемента, выполненного в виде обмотки возбуждения, которая состоит из катушек 1 индуктивности, каждая из них имеет корпус 2, в котором она жестко закреплена. Катушки 1 индуктивности размещены на корпусе 3 подвижной части устройства в направлении движения. Имеются регуляторы 4 тока, каждая из катушек 1 индуктивности подключена через клемму 5 к источнику однофазного тока (не показан) и регулятору 4 тока соответственно, при этом катушки 1 соединены друг с другом и с источником однофазного тока так, что образуют переменно-полюсную магнитную систему.
Центр масс 6 располагается между центрами катушек индуктивности 1 или совпадает с одним из них, а также может располагаться вне их. Корпуса 2 этих двух (фиг.1) или более (фиг.3) катушек 1 индуктивности установлены в корпусе 3 подвижной части устройства с возможностью их вращения вокруг вертикальной оси, при этом другая часть катушек 1 индуктивности может быть закреплена на подвижной части устройства без возможности их вращения вокруг вертикальной оси (на фиг. 1 крайние катушки 1 индуктивности имеют возможность вращения относительно корпуса 3 подвижной части устройства вокруг вертикальной оси, а расположенные ближе к середине устройства - нет). На фиг. 3 все катушки 1 индуктивности имеют возможность вращения вокруг вертикальной оси.
Привод 7, с помощью которого может быть выполнен поворот корпуса 2 с закрепленной в нем катушкой 1 индуктивности относительно корпуса 3 подвижной части устройства вокруг вертикальной оси, при этом одна часть привода 7 размещена и скреплена с корпусом 3 подвижной части устройства, а другая - через опору 8 привода - с корпусом 2 катушки 1 индуктивности. Имеется регулятор 9 привода, подключенный к соответствующему приводу 7. 10 - опора катушки 1 индуктивности, 11 - вал.
Безобмоточный вторичный элемент 12 выполнен из немагнитного металла и жестко связан с основанием пути. 13 - скользун, по которому скользит опора 10 катушки 1 индуктивности. 14 - корпус опоры 10. 15 - корпус привода 7. Привод 7 может быть выполнен, например, электромеханическим. Другим примером выполнения привода 7 будет его исполнение в виде электродвигателя, например, шагового или многополюсного. Еще одним примером выполнения привода 7 будет его исполнение в виде гидропривода. Опора 10 катушки 1 индуктивности может быть совмещена с опорой 8 привода (см.фиг. 1,2) или выполнена отдельно от нее (фиг.3).
Катушки 1 индуктивности выполняются, например, из меди, алюминия или его сплавов, или другого материала, имеющего низкое удельное электрическое сопротивление и не являющего ферромагнитным материалом. Еще одним примером материала для катушек 1 индуктивности является сверхпроводник. Корпуса 2 и 3 катушек 1 индуктивности и подвижной части соответственно могут быть выполнены, например, из неметаллического материала такого, как пластмасса.
Вторичный элемент 12 выполняется из немагнитного металла, например алюминия, его сплавов, меди или другого металла, имеющего низкое удельное электрическое сопротивление. Ширина вторичного элемента 12 может быть выполнена превышающей ширину катушек 1 индуктивности на удвоенную величину подвеса. Катушки 1 индуктивности, составляющие обмотку возбуждения, располагаются в направлении движения в один, два или более рядов. Регулятор 4 тока регулирует величину тока в каждой из катушек 1 индуктивности и управляется системой управления движением (не показано). Регулятор 9 привода регулирует усилие, развиваемое приводом 7, который поворачивает корпус 2 соответствующей катушки индуктивности относительно подвижной части устройства вокруг вертикальной оси на соответствующий угол. Усилие от катушки 1 индуктивности через корпус 2 передается валу 11, а через него - опоре 10. Это усилие от опоры 10 через ее корпус 14 передается корпусу 3 подвижной части устройства.
Устройство для левитации и тяги на однофазном токе работает следующим образом.
1. В случае движения подвижной части устройства по прямолинейному участку пути. Включается источник однофазного тока, благодаря чему на клеммы 5 катушек 1 индуктивности подается напряжение, и катушки 1 индуктивности запитываются однофазным током (на фиг. 4 знаками (+),(-) обозначена мгновенная полярность переменного однофазного тока, а стрелками - направление тока в катушках индуктивности). Регуляторы тока 4 поддерживают в катушках 1 индуктивности ток необходимой величины. Магнитные поля четных и нечетных катушек 1 индуктивности обмотки возбуждения направлены в противоположные направления. В любой момент времени в обмотке возбуждения образована переменно-полюсная магнитная система. В обмотке возбуждения создается изменяющийся во времени магнитный поток, который эквивалентен двум одинаковым магнитным потокам постоянной величины, бегущим в разные стороны с одной и той же скоростью. От взаимодействия этого магнитного поля с индукционными или вихревыми токами во вторичном элементе 12 возникает сила тяги и левитации. При скорости подвижной части устройства отличной от нуля, обратное магнитное поле обеспечивает силу тяги, а прямое магнитное поле - силу левитации (подвеса). При нулевой скорости сила тяги равна нулю, а сила левитации обеспечивает подвес подвижной части устройства. Регуляторы 9 привода выдают приводам 7 такие сигналы, в соответствии с которыми эти приводы удерживают катушки 1 индуктивности, имеющие возможность вращения вокруг вертикальной оси, в направлении, совпадающем с продольной осью подвижной части устройства. При возникновении усилий, стремящихся столкнуть подвижную часть устройства, например в поперечном направлении, центр масс подвижной части устройства смещается в сторону относительно продольной оси вторичного элемента 12.
А. В случае, когда центр масс подвижной части устройства совпадает с центром одной из катушек индуктивности, выполненной с возможностью ее вращения вокруг вертикальной оси. От системы управления (не показана) в регуляторы 9 привода катушки 1 индуктивности, совпадающей с центром масс подвижной части устройства, поступает сигнал, согласно которому привод 7 поворачивает корпус 2 катушки индуктивности вокруг вертикальной оси в сторону, противоположную смещению центра масс подвижной части устройства, при этом в другие катушки 1 индуктивности через регуляторы 4 тока поступает сигнал на форсировку тока, необходимую для компенсации суммарного вектора тяги, связанного с уменьшением тяги катушкой индуктивности, повернутой вокруг вертикальной оси. С окончанием усилий, сталкивающих подвижную часть устройства, и ликвидацией смещения центра масс подвижной части устройства относительно требуемой траектории от системы управления через регулятор 9 привода на приводы 7 поступает сигнал, согласно которому корпус 2 катушки 1 индуктивности возвращается в исходное положение, а с остальных катушек 1 индуктивности снимается сигнал форсировки.
Б. В случае, когда центр масс подвижной части устройства расположен между центрами катушек индуктивности, выполненных с возможностью их вращения вокруг вертикальной оси. От системы управления через регуляторы 9 привода в приводы 7 катушек 1 индуктивности, выполненных с возможностью их вращения, поступает сигнал, согласно которому эти катушки поворачиваются вокруг вертикальной оси на некоторый угол в направлении противоположном смещению центра масс подвижной части устройства, при этом в каждой из этих катушек суммарный вектор становится состоящим из двух векторов: вектора, создающего силу тяги, и вектора, перпендикулярного ему и направленного в сторону уменьшения рассогласования нахождения центра масс подвижной части устройства от требуемой траектории его движения, при этом вектор, создающий силу тяги, уменьшается. Для компенсации его уменьшения в суммарном векторе тяги от системы управления через регулятор 4 тока на остальные катушки 1 индуктивности подается сигнал форсировки, в результате чего суммарный вектор тяги восстанавливается, и скорость движения подвижной части устройства не уменьшается. С окончанием усилий, сталкивающих подвижную часть установки, и ликвидации смещения центра масс подвижной части устройства относительно требуемой траектории от системы управления через регуляторы 9 привода на приводы 7 поступает сигнал, согласно которому корпуса 2 катушек 1 индуктивности возвращаются в исходное положение, а с остальных катушек 1 индуктивности снимается сигнал форсировки.
В общем случае возвращение подвижной части установки от воздействия помех в исходное положение происходит одновременно при возникновении усилий, стремящихся развернуть подвижную часть устройства вокруг вертикальной оси.
В. В случае совпадения центра масс подвижной части устройства с центром одной из катушек индуктивности, выполненной с возможностью ее вращения вокруг вертикальной оси. От системы управления на регуляторы 9 привода катушки индуктивности, центр которой не совпадает с центром подвижной части устройства, поступает сигнал, согласно которому привод 7 этой катушки поворачивает ее вокруг вертикальной оси в направлении, противоположном развороту, вызванному помехой, при этом в остальные катушки 1 индуктивности через регуляторы 4 тока подается сигнал форсировки, в результате чего суммарный вектор тяги восстанавливается, и скорость подвижной части устройства сохраняется постоянной. Благодаря действию восстанавливающего момента-вектора, направленного от повернутой катушки 1 индуктивности на плечо до центра масс подвижной части устройства - корпус подвижной части устройства поворачивается до направления, существовавшего до действия помехи, после чего разворот катушки 1 индуктивности в исходное состояние прекращается, а с остальных катушек 1 индуктивности снимается сигнал форсировки.
Г. В случае, когда центр масс подвижной части устройства расположен между центрами катушек индуктивности, выполненных с возможностью их вращения вокруг вертикальной оси. От системы управления в регуляторы 9 привода двух катушек 1 индуктивности, расположенных с противоположных сторон от центра масс подвижной части устройства подается сигнал, согласно которому приводы 7 этих катушек поворачивают катушки 1 вокруг вертикальной оси в направлении, противоположном развороту, вызванному помехой, при этом оси этих катушек 1 индуктивности параллельны друг другу и направлены в противоположные стороны, при этом в остальные катушки 1 индуктивности подается сигнал форсировки, в результате чего суммарный вектор тяги восстанавливается. Благодаря действию двух восстанавливающих моментов от двух катушек 1 индуктивности корпус подвижной части устройства поворачивается до направления, существовавшего до помехи, после чего разворот катушки 1 индуктивности в исходное состояние прекращается, а с остальных катушек 1 индуктивности снимается сигнал форсировки.
2. В случае перехода первичной части установки с одного на другой путь и его движения по криволинейному пути. По сигналам от системы управления (не показано) через регуляторы 9 привода в приводы 7 катушек индуктивности, выполненных с возможностью их вращения, поступает сигнал, согласно которому эти катушки поворачиваются вокруг вертикальной оси на некоторый угол в направлении другого пути, при этом в каждой из этих катушек суммарный вектор можно разделить на их составляющие вектора: на вектор, создающий силу тяги (его абсолютная величина уменьшается), и на вектор, направленный перпендикулярно продольной оси подвижной части устройства. Для компенсации его уменьшения в суммарном векторе тяги от системы управления через регуляторы 4 тока на остальные катушки 1 индуктивности подается сигнал форсировки, в результате чего суммарный вектор тяги восстанавливается, а скорость прохождения криволинейного участка подвижной частью устройства остается постоянной.
После окончания поворота от системы управления через регуляторы 9 привода в приводы 7 катушек индуктивности снимается сигнал, в соответствии с которым катушки 1 индуктивности поворачиваются в исходное положение, а с остальных катушек 1 индуктивности снимается сигнал форсировки и подается сигнал через регуляторы 4 тока на катушки, участвовавшие в повороте подвижной части устройства, в результате чего суммарная тяга катушек 1 индуктивности восстанавливается. Подвижная часть устройства продолжает движение в прямолинейном направлении по другому пути.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНАЯ УСТАНОВКА ЛЕВИТАЦИИ И ТЯГИ НА ОДНОФАЗНОМ ПЕРЕМЕННОМ ТОКЕ | 1990 |
|
RU2019458C1 |
| ТРАНСПОРТНАЯ УСТАНОВКА ЛЕВИТАЦИИ И ТЯГИ НА ОДНОФАЗНОМ ПЕРЕМЕННОМ ТОКЕ | 1990 |
|
RU2019447C1 |
| Устройство тяги на переменном токе транспортного средства | 1989 |
|
SU1818260A1 |
| Линейный синхронный двигатель | 1989 |
|
SU1697209A1 |
| Устройство для гашения колебаний | 1990 |
|
SU1778387A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ТРЕХФАЗНЫМ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С ФАЗНЫМ РОТОРОМ | 1991 |
|
RU2056699C1 |
| УСТРОЙСТВО ДЛЯ ПРОВЕРКИ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ | 1991 |
|
RU2033935C1 |
| ВОЛЬТОДОБАВОЧНОЕ УСТРОЙСТВО ДЛЯ ЭЛЕКТРИФИЦИРОВАННОЙ ЖЕЛЕЗНОЙ ДОРОГИ ПЕРЕМЕННОГО ТОКА | 1991 |
|
RU2007306C1 |
| Устройство для плавки металла во взвешенном состоянии | 1989 |
|
SU1697283A1 |
| Перегонная автоблокировка | 1986 |
|
SU1384455A1 |
Использование: в линейных асинхронных двигателях. Сущность изобретения: с корпусом 3 подвижной части установки связаны катушки 1 индуктивности, каждая из которых через соответствующий регулятор 4 тока подключена к источнику питания. Катушки 1 индуктивности установлены на корпусе 3 с возможностью поворота вокруг вертикальной оси. 4 ил.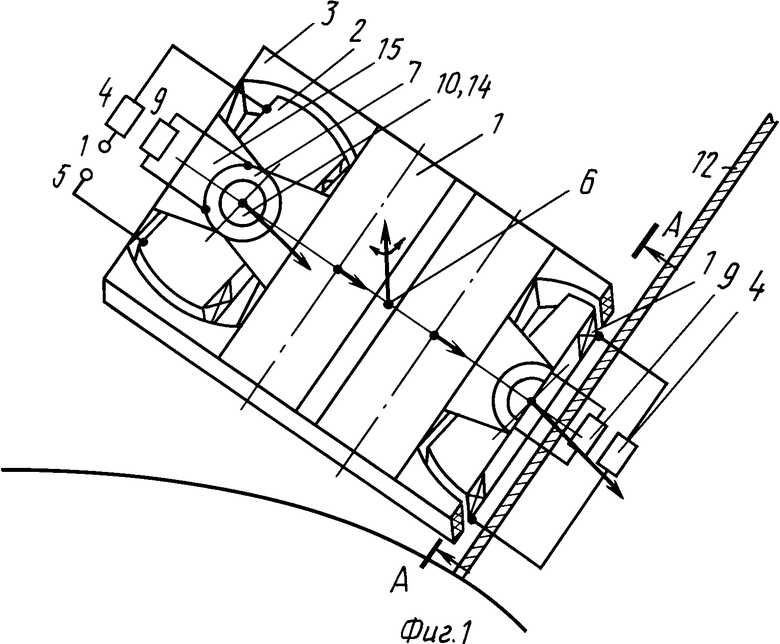
УСТРОЙСТВО ДЛЯ ЛЕВИТАЦИИ И ТЯГИ НА ОДНОФАЗНОМ ТОКЕ, содержащее закрепленный на корпусе подвижной части первичный элемент, выполненный в виде обмотки возбуждения, имеющей по меньшей мере четыре эллипсовидные катушки индуктивности, расположенные вдоль корпуса подвижной части в один ряд на расстоянии одна от другой, равном полюсному делению, с размещением меньшей оси по продольной оси корпуса подвижной части, соединенные между собой с образованием переменно-полюсной магнитной системы и имеющие выводы для подключения к источнику питания однофазного тока, и корпуса, в которых они закреплены жестко, а на пути установлен безобмоточный вторичный элемент, выполненный в виде пластины из немагнитного материала, жестко связанной с основанием пути и взаимодействующей с катушками индуктивности, отличающееся тем, что она снабжена установленными на подвижной части регуляторами тока и приводами, каждый из которых выполнен из двух частей подвижных одна относительно другой частей, одна из которых жестко соединена с корпусом подвижной части, а другая - с корпусом соответствующей катушки индуктивности для поворота его вокруг вертикальной оси относительно корпуса подвижной части, причем приводы соединены с одними регуляторами тока, а другие регуляторы тока включены между источником питания однофазного тока и соответствующими катушками индуктивности.
| Байко А.В., Кочетков В.М | |||
| Система левитации и тяги на переменном токе | |||
| Известия высших учебных заведений | |||
| Новочеркасск, Электромеханика, 1985, N 11, с.40-47. |
