Изобретение относится к автоматизированным системам технического контроля шариков подшипников, в частности к оптоэлектронным системам технического контроля шариков подшипников, которые имеют зеркально отражающую выпуклую поверхность.
Известны автоматизированные системы технического контроля шарика подшипника, включая оптоэлектронные системы, которые обеспечивают высокие скорости и надежность технического контроля [1].
Наиболее близким по технической сущности к изобретению является устройство для контроля шарика подшипника [2], в котором освещают каждую одну или несколько зон зеркально отражающей выпуклой поверхности проверяемого шарика падающим пучком нерассеянного света (например, светом от "точечного источника"). Один или несколько соответствующим образом расположенных фотодетекторов принимают свет, зеркально отраженный от одной или нескольких освещенных зон выпуклой (сферической) поверхности проверяемого шарика подшипника. Электронное средство, подключенное к каждому фотодетектору, регистрирует принимаемую им интенсивность света. Дефект, имеющийся в любой освещенной зоне поверхности шарика подшипника, рассеивает или поглощает падающий свет, а не зеркально отражает его. Это приводит к изменению интенсивности света, принимаемого по крайней мере одним фотодетектором. Электронное средство, фиксирующее изменение интенсивности света, указывает на то, что проверяемый шарик подшипника является дефектным и предпочтительно будет приводить в действие механическое средство разделения шариков для удаления проверенного дефектного шарика подшипника.
Для того, чтобы гарантировать, что практически каждая зона на всей сферической поверхности проверяемого шарика эффективно освещается падающим пучком света, проверяемый шарик перемещают заданным образом относительно источника или источников падающего пучка света и подходящим образом размещенного фотодетектора или фотодетекторов. Проверяемый шарик подшипника поворачивают одновременно вокруг двух взаимно перпендикулярных осей с двумя соответствующими различными заданными угловыми скоростями посредством дифференциального механизма или скатывают с постоянной заданной угловой скоростью вниз на два горизонтальных направляющих рельса. Расстояние между этими рельсами выбирается только немного меньше диаметра проверяемого шарика подшипника. В результате этого при совершении проверяемым шариком полного оборота он поступательно перемещается по горизонтальным рельсам на очень незначительное расстояние (т.е. отношение угловой скорости к скорости поступательного перемещения проверяемого шарика выбирается очень большим). Известная оптоэлектронная система технического контроля шариков подшипников, использующая второй указанный выше способ перемещения проверяемого шарика, имеет чувствительность, достаточную для обнаружения дефекта, имеющего размер 0,0254 см или больше, но имеет невысокую надежность контроля.
Цель изобретения - повышение надежности контроля.
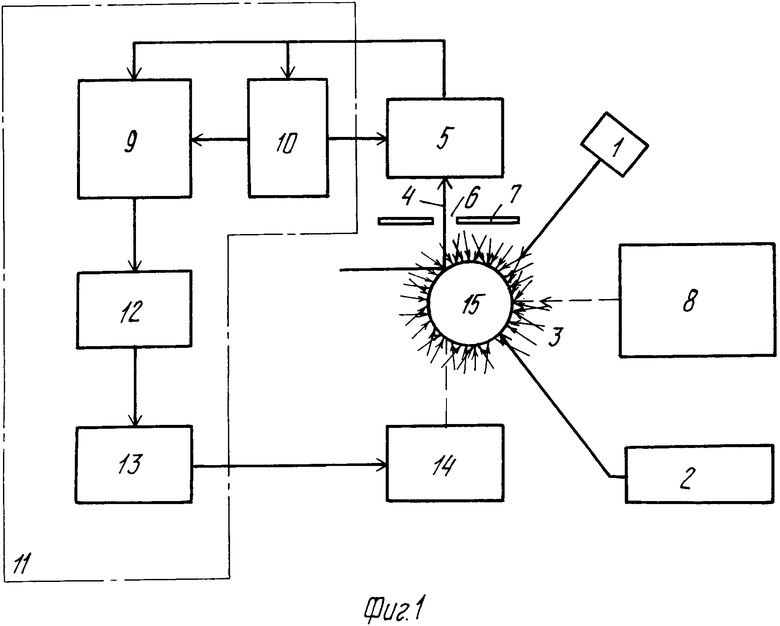
На фиг. 1 показана функциональная схема предлагаемого устройства; на фиг.2, 3 и 4 - варианты реализации изобретения; на фиг.5-8 - временные схемы, необходимые для понимания функционирования предпочитаемого варианта схемы, показанной на фиг.2; на фиг.9 показана относительная интенсивность света отраженного сформированного изображения по всей площади поверхности контролируемого шарика подшипника; на фиг.10 и 11 - соответственно варианты схемы вспомогательного устройства, которое добавляется к схеме устройства, показанного на фиг.2.
Устройство для контроля шариков подшипников (фиг.1) содержит источник 1, освещающий сферическую выпуклую поверхность шарика подшипника 2 рассеянным светом. Рассеянный свет, падающий под различными углами, освещает каждую точку зеркально отражающей поверхности проверяемого шарика 2 подшипника. Каждый падающий луч 3 света на поверхность приводит к соответствующему отраженному лучу в точке падения с углом отражения, равным углу падения (такому, как отраженный луч 4, имеющий угол отражения, равный углу падения луча 3 света).
Блок, представляющий собой один или несколько формирователей 5 изображения, расположенных под углом на некотором расстоянии от проверяемого шарика 2 подшипника. Кроме того, каждый формирователь изображения может представлять собой простой фотодетектор, состоящий из одного фотоэлемента (или видеокамеры), включающий одномерную или двумерную матрицу фотоэлементов (периодически сканируемую твердотельную матрицу). Каждый формирователь изображения принимает узкий пучок отраженных лучей (луч 4) с поверхности проверяемого шарика подшипника, которые проходят через небольшое отверстие 6 в пластине 7. Пластина 7 практически предотвращает попадание любого луча рассеянного света на формирователь изображения.
Проверяемый шарик 2 подшипника механически связан со средством 8 для его поступательного перемещения и/или поворота. В зависимости от конкретной реализации блоков, показанных на фиг.1, средство 8 может одновременно поступательно перемещать проверяемый шарик 2 подшипника в одном направлении с данной линейной скоростью путем поворота шарика с данной угловой скоростью вокруг оси, перпендикулярной этому направлению.
Средство 8 может одновременно поворачивать проверяемый шарик 2 с первой угловой скоростью вокруг первой оси и с второй угловой скоростью вокруг второй оси, перпендикулярной первой оси.
Перемещение проверяемого шарика 2 средством 8 вместе со сканированием формирователей 5 изображения (в случае, когда один или несколько формирователей 5 изображения представляют собой видеокамеру) таково, что отраженные лучи света (луч 4), принимаются практически от каждой точки поверхности проверяемого шарика 2 одним или несколькими формирователями 5 изображения в течение данного периода синхронизации.
Сигналы с соответствующих выходов одного или нескольких формирователей изображения поступают на входы средства 9 преобразования координат и запоминания элементов изображения и средства 10 детектирования (обнаружения) шарика и управления, входящих в состав средства 11 обработки изображений и управления, в котором обычно осуществляется обработка данных в цифровой форме. В этом случае информация об изображении, первоначально принятая одним или несколькими формирователями 5 изображения в аналоговой форме, преобразуется в цифровую форму одним или несколькими аналого-цифровыми преобразователями, которые могут входить в состав средства 11 обработки изображений и управления.
Средство 10 содержит первый выход, сигнал с которого поступает на вход каждого одного или нескольких формирователей 5 изображения, и второй выход, сигнал с которого поступает на вход средства 9. Сигнал с выхода средства 9 поступает на вход детектора 12 дефектов. Сигнал с выхода детектора 12 дефектов поступает на вход средства 13 принятия решения "годен" (забракован). Сигнал с выхода средства 13, являющийся выходным сигналом со средства 11, поступает на вход средства 14 разделения "годен" (забракован). Средство 14, являющееся механическим средством, работа которого управляется сигналом, поступающим с выхода средства 13, механически связывается с проверяемым шариком 2, отделяя дефектные шарики подшипников от недефектных.
Устройство для контроля шариков подшипников работает следующим образом.
Если проверяемый шарик не находится в поле зрения любого одного или нескольких формирователей 5 изображения, величина сигнала на их выходе должна быть низкой, так как в этом случае отраженный луч практически не попадает к ним. Поэтому средство 10 детектирования и управления может обнаружить присутствие проверяемого шарика, входящего в поле зрения по крайней мере одного или нескольких формирователей 5 изображения, по резкому увеличению уровня сигнала на выходе формирователей 5 изображения.
Обнаружение детектором шарика в поле зрения формирователей 5 изображения инициирует период синхронизации синхронизирующим средством, входящим в состав средства 10. В течение этого периода синхронизации имеет место технический контроль (обследование) шарика подшипника, но период технического контроля не обязательно совпадает с периодом синхронизации. Синхронизирующее средство может обеспечивать определенную задержку между началом периода синхронизации и началом периода технического контроля. Кроме того, синхронизирующее средство может сократить период технического контроля по сравнению с периодом синхронизации. Начало и окончание периода технического контроля относительно начала и окончания периода синхронизации зависит от конкретной реализации блоков, показанных на фиг.1. Однако в любом случае вся поверхность проверяемого шарика 2 подшипника должна быть обследована заданным и правильным образом в течение части периода синхронизации, отведенной на технический контроль.
Если один или несколько формирователей 5 изображения представляют собой видеокамеры, а не простые фотодетекторы, синхронизирующее средство средства 10 обеспечивает периодические синхронизирующие сигналы соответствующей частоты для управления процессом развертки (сканирования) в одной или нескольких видеокамерах. Кроме того, в течение периода технического контроля периода синхронизации синхронизирующее средство средства 10 выдает синхронизирующие сигналы, поступающие в средство 9, куда подаются также сигналы от одного или нескольких формирователей 5.
Поток сигналов изображения от одного или нескольких формирователей 5 в течение всего периода технического контроля представляет изображение всей зеркально отражающей сферической поверхности проверяемого шарика 2. Желательно хранить это изображение в виде плоской двумерной сферической поверхности проверяемого шарика 2, а не сферической (типа глобуса) карты. Для осуществления этого необходимо выполнить преобразование сферических координат в прямоугольные (или полярные) координаты.
Это выполняется в части преобразования координат средства 9, принимая во внимание заданное и правильное обследование соответствующих точек зеркально отражающей сферической поверхности проверяемого шарика 2 так же, как любое искажение изображения, которое может иметь место для передачи сигналов изображения от одного или нескольких формирователей 5. Под контролем синхронизирующих сигналов, поступающих к нему от средства 10, средство 9 запоминает каждый сигнал из переведенных в другие координаты элементов изображения в соответствующим образом адресованной ячейке памяти его запоминающего средства. В результате в запоминающей части средства 9 запоминается двумерная плоская карта (предпочтительно в прямоугольных координатах) зеркально отраженного изображения сферической поверхности проверяемого шарика 2.
При необходимости воспроизведения стоп-кадра изображения, хранящегося в запоминающейся части средства 9 на видеомониторе и если бы проверяемый шарик 2 не имел дефектов, на экране видеомонитора было бы белое изображение, которое если и имело бы неоднородную яркость по полю, то это изменение в яркости было бы очень незначительным и плавным по всей площади изображения. Это объясняется тем, что зеркально отражающая сферическая поверхность проверяемого шарика 2 ведет себя как выпуклое зеркало, которое отражает изображение рассеянного света и именно это изображение рассеянного света воспроизводится на экране видеомонитора, воспроизводящего информацию, хранящуюся в запоминающей части средства 9. Вид такого воспроизводимого изображения должен быть сходен с видом облака.
Когда шарик 2 имеет дефект 15 (фиг.1), представляющий собой выемку, заусенец, царапину, пятно ржавчины, падающий на него свет рассеивается или поглощается им, а не зеркально отражается. С другой стороны, такой дефект, как стертость, концентрирует свет, отраженный от зеркально отраженной выпуклой поверхности. В результате на экране видеомонитора изображение, запомненное в средстве 9, полученное от дефектного проверяемого шарика, выглядело бы как светоконтрастное изображение дефекта на белом фоне, представляющем недефектную часть проверяемого шарика. В случае дефекта в виде истертости концентрация отраженного света привела бы к тому, что сверхконтрастное изображение дефекта было бы более ярким, чем фон, в то время, как другие типы дефектов, вызывающие рассеяние или поглощение отраженного света, привели бы к тому, что светоконтрастное изображение дефекта было бы темнее фона. Однако во всех случаях светоконтрастное изображение дефекта имеет четкую границу относительно фона.
Так как обычно нет необходимости в визуализации отраженного изображения проверяемого шарика подшипника, на фиг.1 видеомонитор не показан. Однако существуют ситуации, как, например, повторное обследование каждого из группы шариков подшипников, которые были признаны дефектными при первоначальной проверке, когда может оказаться желательным визуально пронаблюдать тип дефекта на каждом шарике подшипника на экране видеомонитора. Таким образом, изобретение подразумевает возможность воспроизведения отраженного изображения, хранящегося в запоминающей части средства 9, на экране видеомонитора.
Детектор 12 дефектов может включать горизонтальный и вертикальный фильтры детектора контура, работающих с потоком сигналов элементов изображения, считываемых с запоминающей части средства 9. В частности, на выходе детектор 12 выдает выходной сигнал, указывающий на наличие и распределение значительных изменений в уровне сигналов элементов изображения, если таковые вообще имеются. Средство 13 принятия решений реагирует на выходной сигнал с детектора 12, поступающий на его вход, выдавая выходной сигнал годности в ответ на полное отсутствие какого-либо светоконтрастного изображения (т.е., практически отсутствие изменений в уровне сигналов элементов изображения). Или же средство 12 выдает выходной сигнал браковки. Более сложное средство 13 могло бы выдавать множество сигналов браковки для группирования светоконтрастных изображений, указывающих на дефект, по размерам и форме в соответствии с распределением значительных изменений в уровне сигналов элементов изображений.
Разделительное средство, которое может включать один или несколько переключателей, механически продвигает шарики подшипников, признанные годными (т. е., бездефектные) по первому пути и продвигает шарики подшипников, признанные дефектными (т.е. забракованными) по второму пути (или, если бы дефектные шарики группировались по размеру и/или форме, по соответствующему одному пути из множества вторых путей).
Для обеспечения надежности в работе желательно, чтобы при отсутствии какого-либо входного сигнала к средству 14, оно всегда работало бы в режиме браковки проверяемого шарика.
Теперь будет описано то, что считается самым практичным воплощением системы технического контроля, представленной на фиг.1.
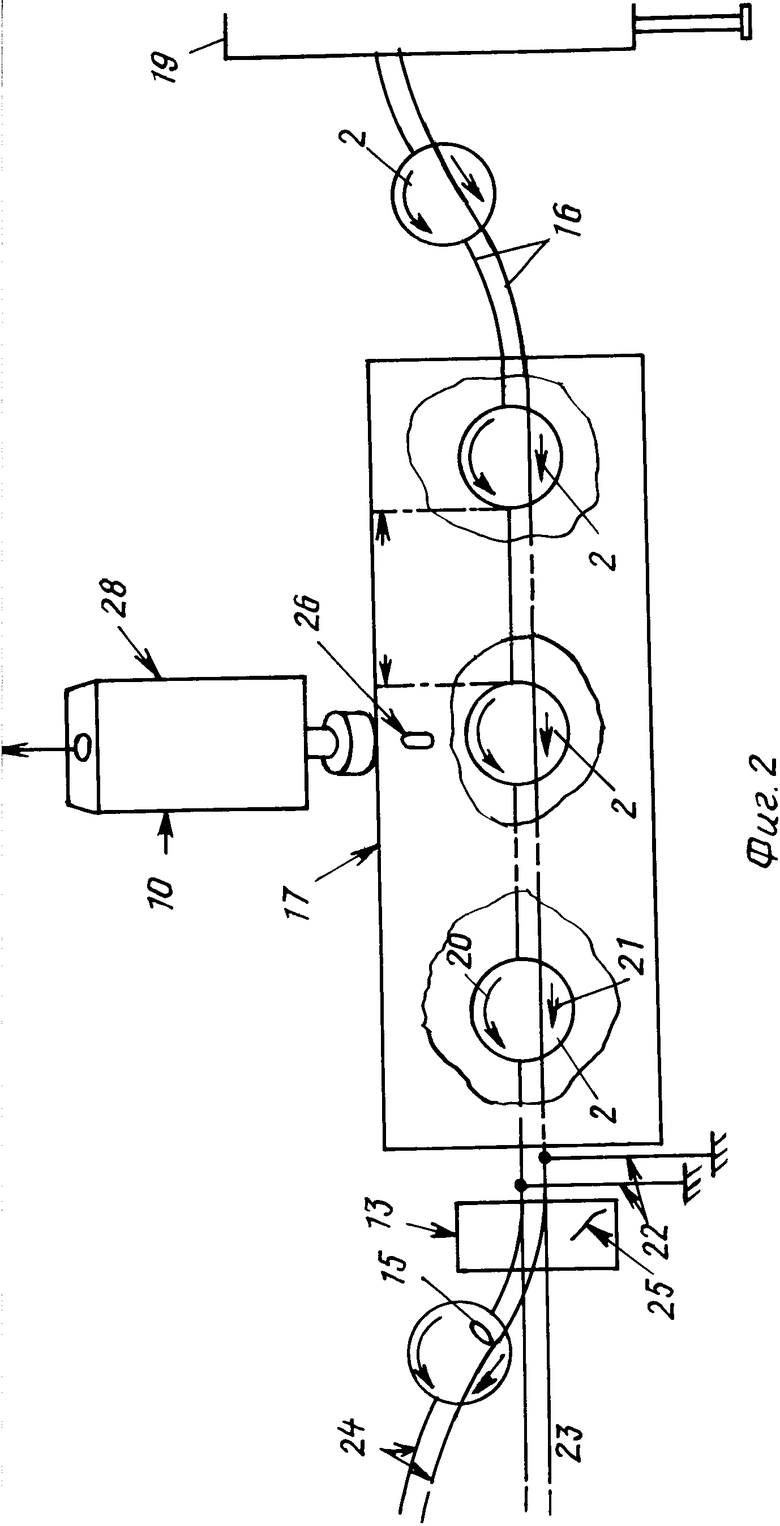
Как показано на фиг.2, горизонтальная часть двух рельсов 16 для направления шариков, которая поддерживает множество находящихся на некотором расстоянии друг от друга шариков 2, простирается на всю длину горизонтальной светорассеивающей цилиндрической трубы 17, которая окружает рельсы.
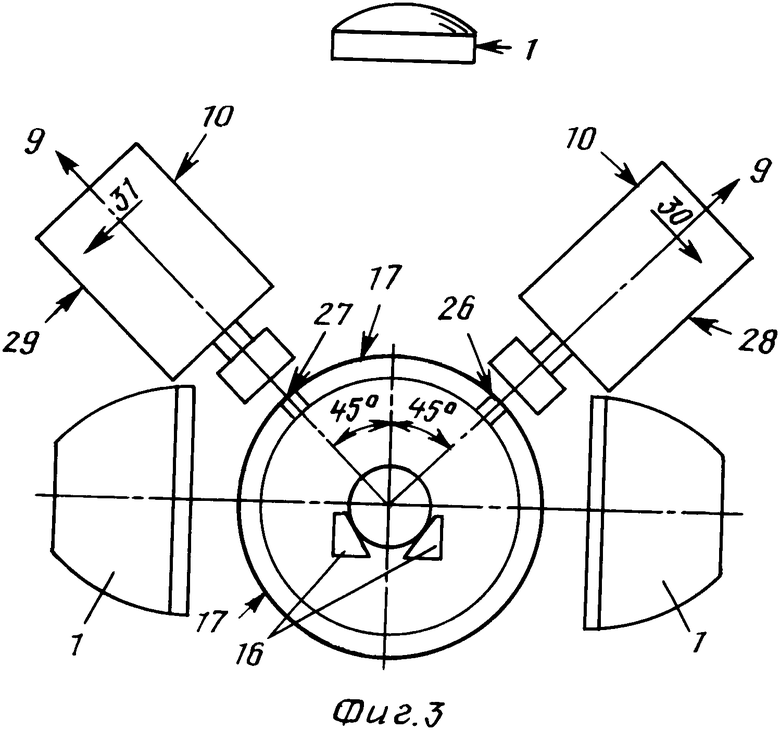
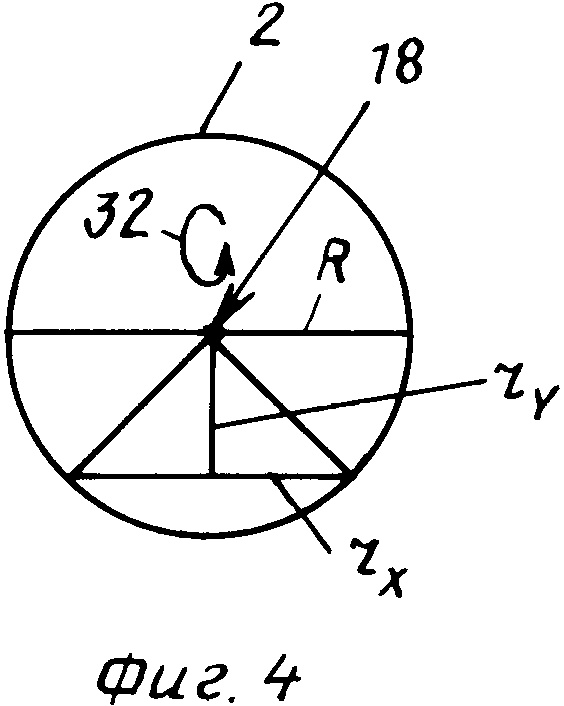
Как ясно из фиг. 3, два рельса 16, каждый из которых имеет скошенную внутреннюю сторону, отделены друг от друга расстоянием, дающим возможность рельсам поддерживать шарик 2 подшипника в точках контакта, расположенных ниже горизонтального диаметра шарика. Таким образом, расстояние 2r между точками контакта шарика 2 с рельсами 16 меньше диаметра 2R шарика 2. Кроме того, центр 18 шарика 2 расположен практически на горизонтальной оси светорассеивающей цилиндрической трубы 17 (фиг.3, 4).
На фиг. 4 показаны геометрические соотношения между горизонтальным широтным радиусом rх, расстоянием ry от широтного диаметра 2rx до горизонтального диаметра 2R шарика 2 и радиусом R шарика 2.
Цилиндрическая труба 17 (фиг.2) является сравнительно длинной относительно своего диаметра (например, соотношение длины к диаметру 6:1). Рельсы 16, идущие к правому концу трубы 17, поднимаются почти к верхней части бункера 19 для шариков 2. Бункер 19 механически поддерживает правый конец рельсов 16. Бункер 19 содержит механическое средство для периодической укладки шариков 2 подшипников на рельсы 16. Уложенный шарик 2 скатывается по рельсам 16 от бункера 19 на горизонтальную часть рельсов 16, ускоряясь до достижения определенной скорости и линейной скорости, определяемых высотой, с которой начал движение шарик подшипника. Затем шарик продолжает катиться горизонтально через всю длину трубы 17. Так как трение в точках контакта шарика с рельсами пренебрежимо мало, угловая скорость и линейная скорость катящегося шарика на всей длине трубы 17 остаются практически постоянными и равными той определенной угловой скорости и линейной скорости, которые были достигнуты при входе в трубу 17 на правом ее конце. Расстояние между двумя соседними шариками подшипников, катящихся справа налево через трубу 17, зависит от времени укладки последовательных шариков в бункере 19 на рельсы 16 и постоянной линейной скорости шариков, катящихся по горизонтальной части рельсов 16.
Время укладки шарика в бункере 19 должно регулироваться таким образом, чтобы расстояние между двумя соседними шариками, катящимися по горизонтальной части рельсов 16, было практически равно диаметру шарика. Как показано на фиг. 2, шарик 2 представляет первый отпущенный в бункере 19 шарик подшипника и соответствующие другие шарики представляют последовательно более позже отпущенные в бункере 19 шарики подшипников. Тот факт, что каждый из последующих шариков одновременно вращается и поступательно перемещается в направлении справа-налево, схематически иллюстрируется соответствующими стрелками такими, как стрелка 20 вращения и стрелка 21 поступательного перемещения шарика.
Рельсы 16 поддерживаются на земле в местах за левым концом трубы 17 опорными элементами 22. Кроме того, в этом месте рельсы 16 разветвляются на две ветки: ветвь с рельсами 23 для направления по ним годных шариков подшипников и ветвь с рельсами 24 для шариков подшипников с дефектами. Переключатель 25 ветвей (соответствующий разделительному средству, показанному на фиг. 1) определяет в соответствии с выходным сигналом средства 13 принятия решений, по которой из двух ветвей с рельсами 23 и 24 на выходе трубы 17 покатится проверенный шарик подшипника.
Труба 17 имеет два небольших отверстия 26 и 27. В осевом направлении трубы 17 оба отверстия расположены практически на полпути между левым и правым противоположными концами трубы 17. В направлении образующей трубы 17 отверстие 26 расположено практически под углом 45о от вершины трубы 17, а отверстие 27 - под углом 45о от вершины трубы 17.
Первая видеокамера 28 расположена в функциональной связи с отверстием 26 для приема отраженных лучей рассеянного света от зеркально отражающей поверхности шарика подшипника, катящегося мимо отверстия 26. Аналогично против отверстия 27 расположена вторая видеокамера 29 (фиг.3) для приема отраженных лучей рассеянного света от зеркально отражающей поверхности шарика, катящегося мимо отверстия 27.
Каждая видеокамера 28 и 29, которая принимает сигналы синхронизации развертки от средства, показанного на фиг.1, содержит твердотельный формирователь сигналов изображения, включающий линейную матрицу фотоэлементов (например, линейный формирователь сигналов изображения на ПЗС). Линейная антенная решетка сигналов изображения видеокамеры ориентирована, как показано стрелкой 30 на фиг.3, для формирования сигналов изображения в течение каждого периода развертки различного среза верхнего правого квадранта сферической поверхности шарика 2 подшипника, катящегося мимо отверстия 26. Аналогично линейный формирователь сигналов изображения видеокамеры 29 ориентирован, как показано стрелкой 31 на фиг.3, для формирования сигналов изображения в течение каждого периода развертки различного среза верхнего левого квадранта сферической поверхности шарика 2 подшипника, катящегося мимо отверстия 27.
Источники 1 света служат для освещения снаружи трубы 17. Свет от источников 1, проходя через трубу 17 внутрь, практически целиком рассеивается по всей ее длине. Источники света не выходят за левый и правый концы трубы 17, поэтому интенсивность любого света, входящего с левого или правого открытого конца трубы 17 является сравнительно малой.
Предлагаемая система технического контроля шариков подшипников (фиг.2, 3 и 4) работает следующим образом.
Вращение шарика 2 подшипника в направлении, показанном стрелкой 32 (фиг. 4) на один полный оборот приводит к поступательному его перемещению в направлении от плоскости листа с чертежом на расстояние, равное 2 πry. Если вместо поворота шарика 2 на один полный оборот в 360о он совершает только часть θ полного оборота, его поступательное перемещение L определяется следующим уравнением:
L = [(360-2 θ )/360o] . (2 πry) (1)
Таким образом, для любой данной величины угла θ длина пройденного пути при поступательном перемещении зависит только от величины ry. Однако величина ry связана с величиной rх следующим уравнением:
ry = (R2 - rx2)1/2 (2)
Так как величина R, радиус шарика подшипника, является постоянной величиной для шарика подшипника любого данного размера, величина ry может изменяться путем соответствующего изменения расстояния между рельсами 16.
Желательно, чтобы поступательное перемещение было равно 2R Sin θ. Подставив это значение в уравнение (1) и решая его для ry, получаем
ry = [180o/(180o - θ)][Sin θ/ π]R, (3)
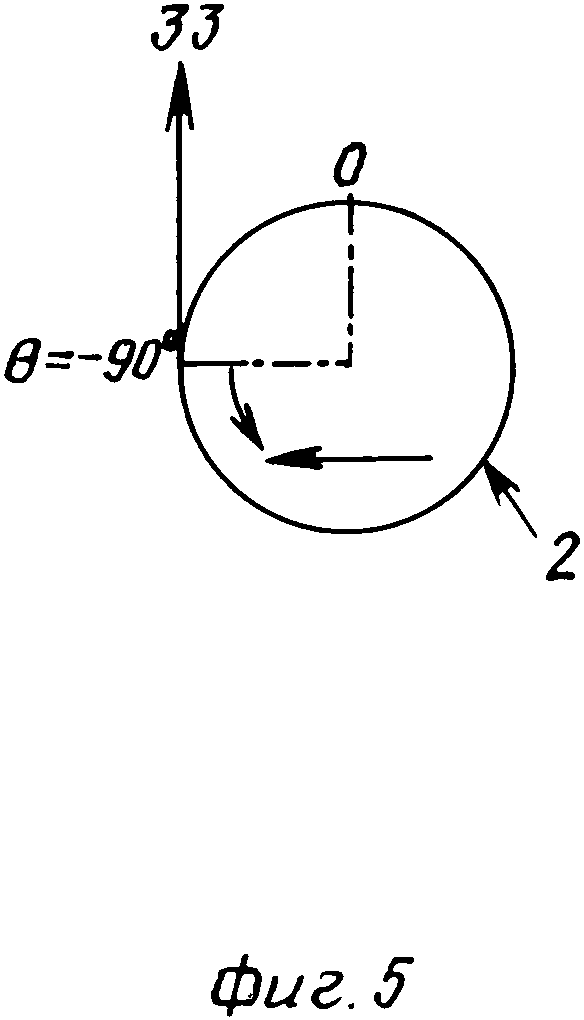
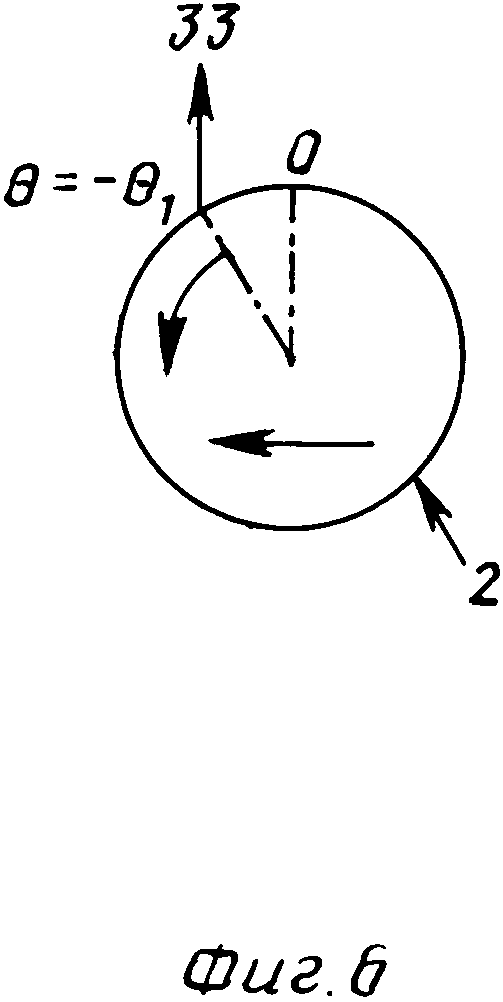
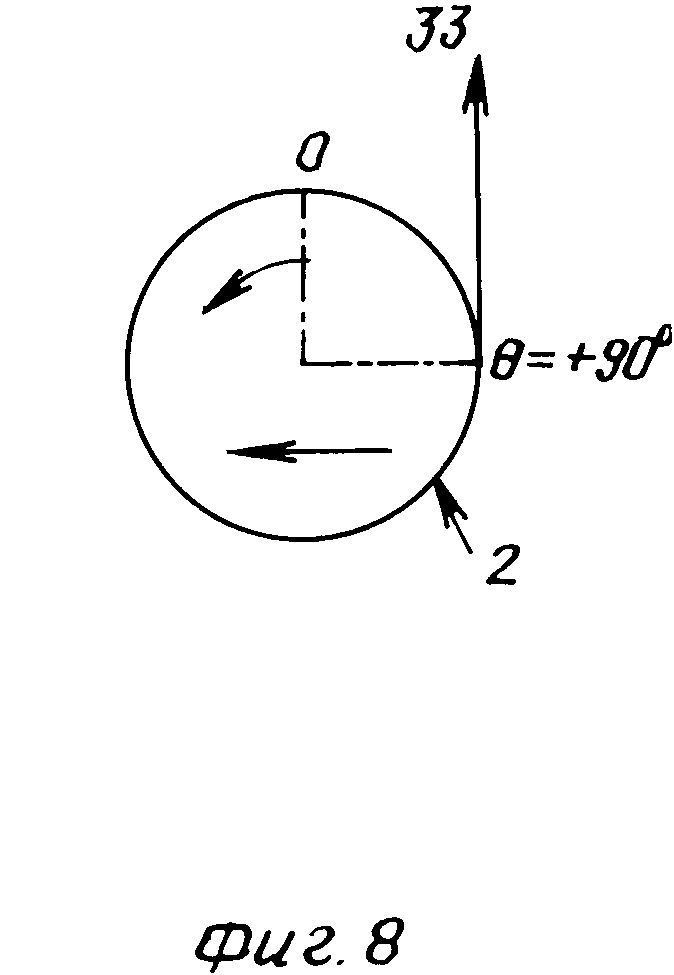
На фиг. 5, 6, 7 и 8 показаны вращение и поступательное перемещение проверяемого шарика 2 подшипника в каждый из четырех последовательных моментов времени to, t1, t2 и t3, соответственно.
В момент времени to шарик, катясь справа-налево, только достигает положения, в котором рассеянный свет, отраженный от него, включает отраженный луч 33, который проходит через отверстие 26 и попадает в видеокамеру 28. Это приводит к выходному сигналу видеокамеры, который подается к средству 10, вызывая срабатывание входящего в его состав детектора, который тем самым дает знать, что проверяемый шарик только что вошел в поле зрения видеокамеры 28. В ответ на это средство 10 начинает отсчет числа периодов развертки видеокамеры.
В момент времени t1, когда средство насчитало первое заданное число периодов развертки (это первое заданное число связано с известной постоянной скоростью горизонтального поступательного перемещения проверяемого шарика 2 подшипника), шарик 2 перемещается налево на такое расстояние, что в момент t1 рассеянный отраженный луч света 33, который достигает видеокамеры 28, отражается от точки на его поверхности, которая находится под углом θ слева от вершины катящегося шарика. В момент времени t1 в ответ на достижение заданного числа периодов развертки видеокамеры средство 10 выдает управляющий сигнал, поступающий к средству 9, которое инициирует начало периода обследования шарика, являющегося частью периода синхронизации, который длится с момента tо до момента t3.
Средство 10 продолжает отсчет периодов развертки до достижения второго заданного числа периодов в момент t3. В момент времени t2 проверяемый шарик 2 движется дальше налево так, что теперь рассеянный отраженный световой луч 33, который достигает видеокамеры 28, отражается от точки сферической поверхности шарика 2, которая расположена под углом θ1 в правую сторону от вершины шарика в момент времени t2.
По достижении в отсчете периодов развертки видеокамеры этого второго заданного числа, средство 10 выдает управляющий сигнал, поступающий к средству 9 для окончания периода обследования шарика, составляющего часть периода синхронизации. Период синхронизации мог бы быть закончен в момент времени t2. Однако желательно продолжать подсчет периодов развертки видеокамеры до тех пор, пока резко не упадет величина выходного сигнала видеокамеры 28, поступающего к детектору шариков, что происходит в момент времени t3, когда шарик 2 смещается влево так далеко, что он выходит из поля зрения видеокамеры 28. Путем окончания периода синхронизации в момент времени t3 можно точно вычислить постоянную линейную горизонтальную скорость шарика 2, так как известен диаметр шарика и период развертки видеокамеры. Таким образом, любые незначительные изменения в предполагаемой линейной скорости поступательного перемещения проверяемых шариков подшипников могут непрерывно корректироваться сразу же после обследования каждого следующего один за другим шарика подшипника.
Предполагается, что практически каждая точка передней полусферы каждого шарика 2 должна просматриваться видеокамерой 28 в течение его прохождения справа-налево через все поля зрения видеокамеры 28 (одновременно видеокамера 29 просматривает по крайней мере каждую точку задней полусферы этого шарика 2). Во временной интервал между моментом времени t1, показанным на фиг.6, и моментом времени t2, показанным на фиг.7, в течение которого имеет место обследование всего шарика подшипника, он поступательно перемещается в положение, соответствующее значению 2R Sinθ . Для того, чтобы все точки передней полусферы шарика просматривались видеокамерой 28 в течение временного интервала t1 и t2, необходимо, чтобы шарик 2 в течение этого временного интервала повернулся на угол 360о - 2 θ1.
Подставляя любое желаемое конкретное значение θ 1 для угла θ в уравнение (3), можно получить значение ry, которое будет гарантировать, что все точки передней полусферы проверяемого шарика подшипника просматриваются видеокамерой 28. Как только получено соответствующее значение ry, можно использовать уравнение (2) для определения соответствующего расстояния между двумя рельсами 16 (т.е. 2rx) для достижения желаемого значения ry.
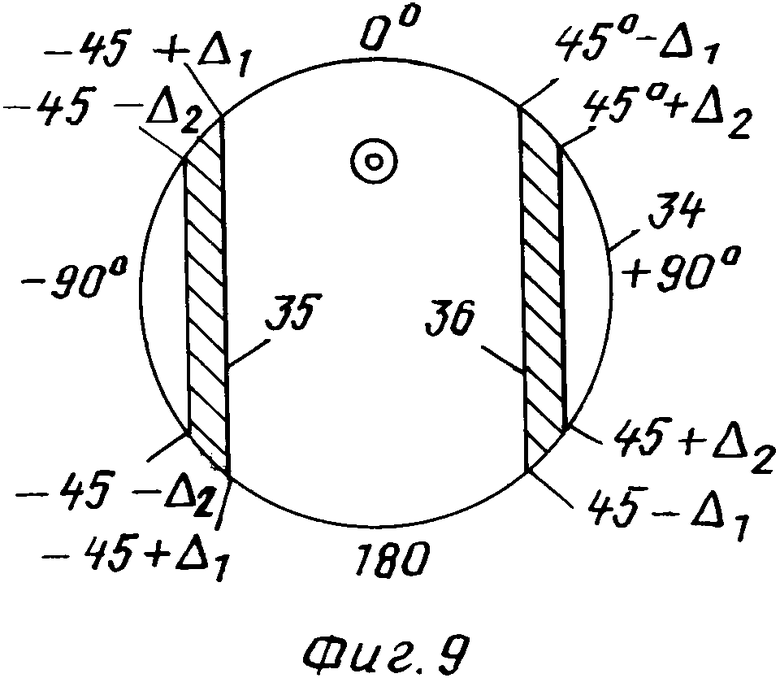
На фиг.9 показано отраженное изображение шарика подшипника, которое могло быть получено, если бы абсолютное значение θ 1 (фиг.6 и 7) составляло 90о, т.е. временной интервал обследования шарика t2-t1 был равен всему периоду синхронизации t3-tо. В этом случае, как показано на фиг.9, отраженное изображение 34 шарика подшипника будет включать две темные полосы 35 и 36 в окрестности -45о широты и +45о широты соответственно. В частности ширина темной полоски 35 простирается от широты (-45 +Δ 1)о до широты (-45 - Δ 2 )о и ширина темной линии лежит в пределах широт (45 -Δ 1)о и (45 +Δ 2)о. Наличие темных полос 35 и 36 свидетельствует о том, что проверяемый шарик подшипника не освещен параксиальными падающими лучами света вследствие того, что оба (левый и правый) конца трубы 17 являются открытыми.
При увеличении отношения длины трубы к ее диаметру соответствующие значения Δ 1 и Δ 2 (и, следовательно, ширина темных полос 35 и 36) становятся меньше. При увеличении отношения диаметра шарика 2 к диаметру трубы 17 отношение Δ1/Δ 2 уменьшается. Кроме того, темные полосы 35 и 36 не имеют резких границ относительной интенсивности света, показанных на фиг.9, а имеют размытые границы. Чтобы избежать всех эффектов темных полос 35 и 36 и гарантировать, что интенсивность света отраженного изображения 37 изменяется незначительно и плавно по всей площади, величина угла θ1 должна быть выбрана сравнительно малой (например, не больше 36о и предпочтительно около 30о).
Из фиг.6 и 7 очевидно, что при повороте из положения - θ1 в положение + θ1 шарик 2 поступательно перемещается на расстояние, равное 2R Sin θ1. Подставляя значение 2R Sin θ1 для пройденного расстояния при поступательном перемещении в уравнение (1), и решая его относительно ry, показанного на фиг.4, приходим к уравнению (3), где вместо угла θ подставляют его значение θ1 (например, если значение θ1 равно 30о, величина ry равна 0,191R, в то время, как расстояние 2rx между рельсами равно около 1,963R.
Исходя из изложенного выше, можно представить, что путем ограничения абсолютного значения θ1 сравнительно малым углом, например, равным 30о, результатом обследования бездефектного шарика 2 было бы совершенно белое отраженное изображение 34 без паразитных контрастных темных полос 35 и 36. Однако тот факт, что в процессе обследования шарика 2, когда значение угла θ приближается к 0о, отверстия 26 и 27 будут вызывать эффект, аналогичный описанному выше от левого и правого открытых концов трубы 17: левый и правый открытые концы трубы 17 приводят к темным полосам 35 и 36 в окрестности +45о широты.
Если отверстие 26 расположено в окрестности 0о, где угол падения и угол отражения приближаются к нулю, падающий световой луч практически совпадает с отраженным световым лучом (отраженный световой луч 33, проходящий через отверстие 26), т. е. отраженный световой луч является отраженным обратно. Однако вследствие наличия отверстия 26 нет падающего света, освещающего проверяемый шарик 2 при практически нулевом угле падения. В результате из-за отверстия 26 получается небольшое слепое пятно 37 на нулевой широте (и 45о долготе). Аналогичное слепое пятно образуется на нулевой широте (и 135о долготе) из-за отверстия 27.
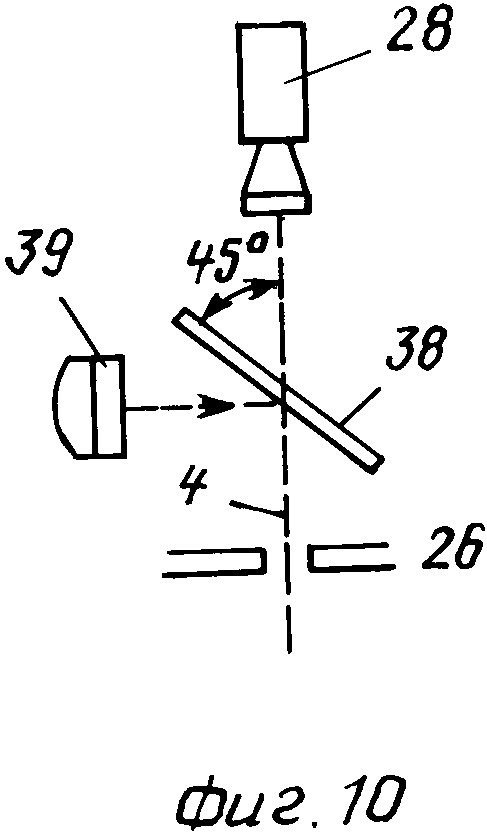
С точки зрения статистики случай, когда проверяемый шарик подшипника будет иметь только один дефект и этот дефект так расположен на нулевой широте, что он совпадает со слепым пятном 37 и является таким малым, что он целиком перекрывается площадью слепого пятна 37, является очень маловероятным (хотя и возможным). Однако использование вспомогательного средства, показанного на фиг.10 и 11, полностью решает проблему слепого пятна.
На фиг. 10 показано полупрозрачное зеркало 38, расположенное снаружи трубы 17 между отверстием 26 и видеокамерой 28. Зеркало 38 ориентировано под углом 45о относительно отраженного светового луча 4. Свет от внешнего источника света 39, который управляется средством 10 только в средней части периода синхронизации, когда угол θ практически равен нулю (т.е., когда имеет место через отверстие 26 обратное отражение). Часть обратно отраженного света, которая включает отраженный световой луч 4, проходит через зеркало 38 и принимается видеокамерой 28. Единственным недостатком использования вспомогательного средства 10, показанного на фиг.10, является то, что из-за зеркала 38 понижается сравнительная интенсивность света, принимаемого видеокамерой 28. Вспомогательное средство, показанное на фиг.11, лишено этого недостатка.
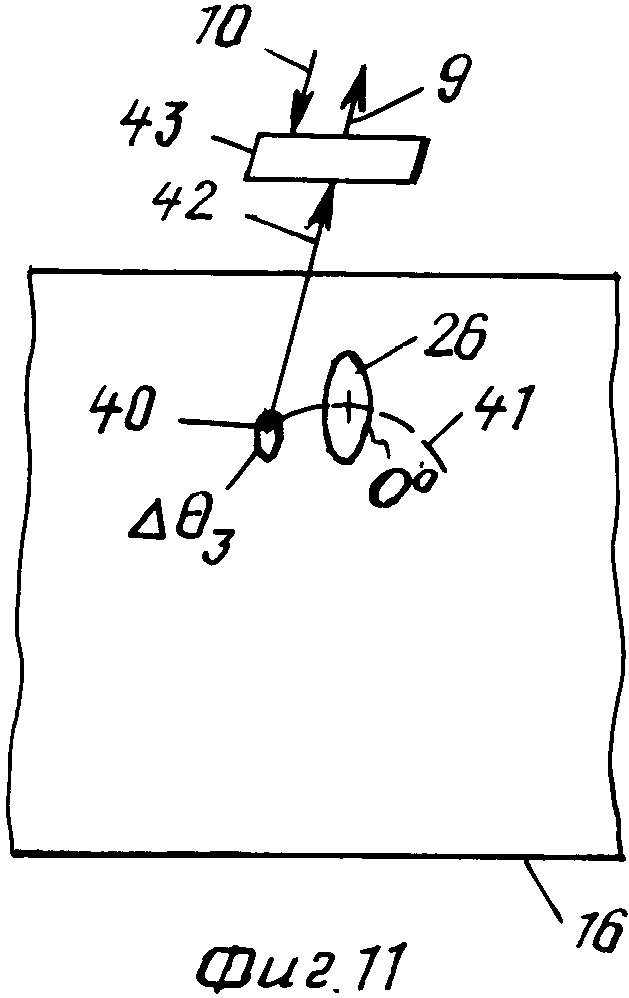
На фиг.11 показано дополнительное отверстие 40 в трубе 17. Отверстие 40 расположено функционально на пути 41, проходимом точками поверхности при прокатывании шарика 2 и справедливо на данный малый угол Δθ3 . В результате, площадь катящегося шарика, составляющая слепое пятно, через отверстие 26 при ее положении с нулевой широтой, должна располагаться в функциональной связи с дополнительным отверстием 40 по истечении незначительного промежутка времени, когда шарик 2 повернется на угол Δθ3 . При достижении угла Δθ3 площадь прежде слепого пятна освещается рассеянным светом для обеспечения отраженного луча 42, ориентированного перпендикулярно оси трубы 17.
Отраженный луч 42 принимается вспомогательным фотоприемником 43, который может быть простым фотоприемником, а не видеокамерой. Фотоприемник 43 обычно бездействует, но приводится в действие средством 10 в момент времени в течение периода синхронизации, когда площадь пятна шарика 2 находится в непосредственной близости от отверстия 40. Выходной сигнал от фотоприемника 43, являющийся показателем интенсивности света отраженного луча 42, подается к средству 9, которое интерпретирует соответствующее пространственное местоположение его, как если бы это случилось в окрестности нулевой широты и 45о долготы проверяемого шарика 2.
Очевидно, что вспомогательное средство, показанное на фиг.11, могло бы располагаться вверх по течению от положения с нулевой широтой, а не вниз по течению. Кроме того, вместо использования простого дополнительного фотоприемника подход, используемый в устройстве, показанном на фиг.11, при решении проблемы слепого пятна мог бы реализоваться с помощью видеокамеры, расположенной или внизу, или вверху по течению от положения с нулевой широтой проверяемого шарика 2. Необходимо также понять, что дублирующие вспомогательные средства, показанные на фиг.10 и 11, используются в функциональной связи с отверстием 27.
Линейный твердотельный формирователь изображения, используемый в видеокамере 28 или 29 (фиг.2), должен содержать достаточное количество дискретных фотоэлементов для достижения желаемой разрешающей способности в обнаружении дефектов. Например, с одним устройством для технического контроля шариков подшипников, имеющих данный диаметр в пределах 1/4 - 1/2 дюйма, линейный твердотельный формирователь изображения, включающий 256 дискретных фотоэлементов, мог бы легко обнаружить дефект, имеющий размеры не более 3 мм. То же самое разрешение достигается для технического контроля шариков подшипников, имеющих диаметр в пределах 1/2-1 дюйма, используя линейный твердотельный формирователь изображения, состоящий из 512 элементов.
Если обнаружено, что проверяемый шарик подшипника имеет дефект 15, приводится в действие средство 13 принятия решения на заданный период времени после проведения обследования этого шарика, который является достаточным для того, чтобы шарик докатился до левого конца трубы 17. После приведения в действие средства 13 оно выдает управляющий сигнал на переключатель 25 рельсов. Переключатель 25 обычно удерживает рельсы 16 состыкованными с рельсами 24 и переводит рельсы 16 в положение для стыковки с рельсами 23 только в случае, если пpоверенный шарик оказался бездефектным. В более сложной системе, чем показанной на фиг.2, рельсы 24 могли бы дальше переключаться для стыковки с любыми выбранными рельсами из множества веток рельсов в зависимости от природы каждого из множества различных типов дефектов, которыми может обладать дефектный шарик подшипника.
Было обнаружено, что предпочтительное воплощение, показанное на фиг.2, способно осуществлять точный технический контроль 7-15 шариков в 1 с, отстоящих друг от друга на расстоянии диаметра шарика. Производительность проверки зависит от диаметра обследуемых шариков.

Использование: автоматизированные системы контроля шариков подшипников. Сущность изобретения: при освещении подвергаемого обследованию шарика подшипника рассеянным светом в изображении, формируемом светом, зеркально отраженным практически от всей выпуклой сферической поверхности его, любой дефект проявляет себя через светоконтрастное изображение на практически однородном фоне из рассеянного света, представляющем изображение бездефектной части поверхности шарика. Система технического контроля содержит средство освещения и светоприемное средство в сочетании со средством для перемещения обследуемого шарика подшипника. 14 з.п. ф-лы, 11 ил.
rx = (ry2 - R)1/2 ,
где ry= R[180°/(180°-θ1)]  ;
;
R - радиус шарика подшипника;
θ1 - широта поверхности качения шарика подшипника.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США N 4259013, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Приспособление для изготовления в грунте бетонных свай с употреблением обсадных труб | 1915 |
|
SU1981A1 |
