Изобретение относится к электронике СВЧ, в частности к устройствам определения дальности до препятствий для наземных транспортных средств.
Известен радиолокационный дальномер для наземных транспортных средств, представляющий собой миниатюру РЛС СВЧ-диапазона для системы предупреждения столкновений автомобилей. РЛС содержит антенну и генератор с частотной модуляцией сигнала. Работа дальномера основана на сканировании луча РЛС по дороге перед транспортным средством и анализа отраженных сигналов от объектов на расстояниях до 100 м. РЛС следит за несколькими объектами и идентифицирует их по дальности, скорости и углу визирования.
К недостаткам этого дальномера следует отнести то, что при его работе происходит излучение СВЧ-энергии, что вредно для окружающей среды и человека, и кроме того, создает проблему устойчивости к помехам от подобных устройств на встречном транспорте.
Известен пассивный дальномер, измеряющий расстояние до объектов, имеющих собственное излучение в инфракрасном (ИК) диапазоне длин волн с заранее известными спектральными характеристиками. Устройство представляет собой двухканальный радиометрический приемник, первый и второй каналы которого содержит последовательно включенные антенну (линзу), модулятор, входной полостно-пропускающий фильтр, детектор, усилитель, интегрирующий блок, усилитель, а также схему сравнения выходных сигналов двух каналов приемника, причем модуляторы каналов синхронизированы. Принцип работы дальномера основан на определении дальности по сопоставлению выходных сигналов двух каналов. Причем эти выходные сигналы разнятся из-за различных коэффициентов поглощения электромагнитных волн атмосферой в двух частотных зонах ИК-диапазона.
Недостатки известного пассивного дальномера заключаются в следующем дальность определяется только до объектов, имеющих достаточно высокий уровень собственного ИК-излучения, причем с заранее известными спектральными характеристиками контролируемого объекта. При этом сколько-нибудь точное определение дальности до ненагретых металлических объектов или объектов с неопределенными характеристиками собственного теплового излучения, например автомобилей, практически невозможно; работа устройства в ИК-диапазоне подвержена сильному влиянию погодных условий, пыли, дыма, которые могут существенно уменьшить точность определения дальности, либо нарушить вообще работоспособность дальномера, при реализации известного схемного решения в СВЧ-или КВЧ-диапазонах конструкция дальномера будет сильно усложнена из-за двух высокочастотных трактов, которые являются наиболее сложными и трудоемкими.
Целью изобретения является упрощение устройства и увеличение точности определения дальности до металлических объектов с неопределенными, заранее неизвестными и малыми по величине собственными тепловыми излучениями и, кроме того, при работе в условиях воздействия различных погодных факторов, пыли и дыма.
Это достигается тем, что в предлагаемом бортовом пассивном радиолокационном дальномере для наземных транспортных средств, содержащем последовательно соединенные антенну и входной полостно-пропускающий фильтр, последовательно включенные первые детектор, интегрирующий блок, усилитель и блок вычисления дальности, последовательно соединенные вторые детектор, интегрирующий блок и усилитель, выход которого подключен к второму входу блока вычисления дальности, выход которого является выходом дальномера, введены последовательно соединенные преобразователь частоты, выход которого подключен к выходу второго полостно-пропускающего фильтра, усилитель промежуточной частоты и первый фильтр, выход которого подключен к входу первого детектора, второй фильтр, вход и выход которого соединены соответственно с выходом усилителя промежуточной частоты и входом второго детектора, при этом полоса пропускания входного полосно-пропускающего фильтра лежит в диапазоне 52-68 ГГц. Устройства с повышенной дальностью определения расстояния до объекта имеют полосу пропускания входного полосно-пропускающего фильтра в диапазоне 52-58 ГГц.
Отличительными особенностями предложенного технического решения от прототипа являются: введение одноканальной части КВЧ-диапазона, введение дополнительных узкополосных фильтров в двухканальной части приемника и определение существенно отличных частотных диапазонов входного и узкополосных фильтров.
На фиг. 1 приведена структурная схема предложенного бортового радиолокационного дальномера, где 1 - антенна, 2 - входной полосно-пропускающий фильтр, 3 - преобразователь частоты, 4 - усилитель промежуточной частоты (УПЧ), 5 - первый и второй фильтры, 6 - первый и второй детекторы, 7 - первый и второй интегрирующие блоки, 8 - первый и второй усилители, 9 - блок вычисления дальности.
Принятый от объекта радиотепловой сигнал с приемной антенны 1 через входной полосно-пропускающий фильтр 2 поступает на широкополосный преобразователь частоты 3, где преобразуется в диапазоне промежуточных частот, усиливается в УПЧ 4, далее делится на два канала, в каждый из которых отфильтровываются сигналы в разнесенных частотных полосах с помощью первого и второго фильтров 5, детектируются первым и вторым детекторами 6, усредняются во времени с заданной постоянной времени в первом и втором интегрирующих блоках 7 и усиливаются первым и вторым усилителями 8. Выходы обоих каналов подключены к блоку вычисления дальности 9. Информация о дальности до объекта содержится в разности выходных сигналов двух каналов радиометрического приемника, предварительно выровненных регулировкой усиления.
Физическая суть принципа действия устройства состоит в том, что проводятся измерения радиотеплового контраста одного и того же металлического объекта одновременно в двух разных частотных областях, характеризующихся различным затуханием электромагнитных волн в атмосфере. При этом оказывается возможным однозначность определить дальность до объекта R, так как величина сигнала на выходе радиометра S при радиотепловом контрасте объекта ΔТ по отношению к флуктуационной чувствительности радиометра ΔТмин определяется соотношением
S≈  · 10-0,1αR где α - коэффициент затухания сигнала в атмосфере в данном диапазоне частот, дБ/км.
· 10-0,1αR где α - коэффициент затухания сигнала в атмосфере в данном диапазоне частот, дБ/км.
При измерении pадиотеплового контраста одного и того же транспортного средства одновременно в двух разных частотных диапазонах можно получить разные значения выходных сигналов. Обозначим все символы, относящиеся к одному частотному диапазону, одинаковыми индексами, например 1 и 2. Тогда разность сигналов на выходе радиометра в двух частотных диапазонах может быть выражена формулой
S2-S1=  · 10
· 10 -
-  · 10
· 10
Отсюда видно, что дальность до цели R определяется из уравнения (1), тогда остальные величины могут быть определены в результате измерения. При этом максимальная дальность однозначного определения расстояния R до цели равна
Rмакс= 10 · 
Выбор рабочего диапазона следует из анализа уравнения (1).
Требования к выбранному диапазону частот следующие:
объект должен обладать достаточным (по возможности максимальным) радиотепловым контрастом на окружающем его фоне, тогда значения выходных сигналов радиометра на двух частотах будут много больше ΔТмин;
так как при одинаковом значении R разнице выходных сигналов тем больше, чем больше разница между коэффициентами затухания электромагнитных волн в атмосфере в двух разных частотных областях, то на выбранных двух центральных рабочих частотах коэффициенты α должны иметь максимальное отличие по величине;
предложенный бортовой пассивный радиолокационный дальномер должен сохранять работоспособность при неблагоприятных метеорологических условиях, т. е. значения коэффициентов α в двух разных частотных областях должны либо оставаться неизменными, либо разность их не должна сильно изменяться.
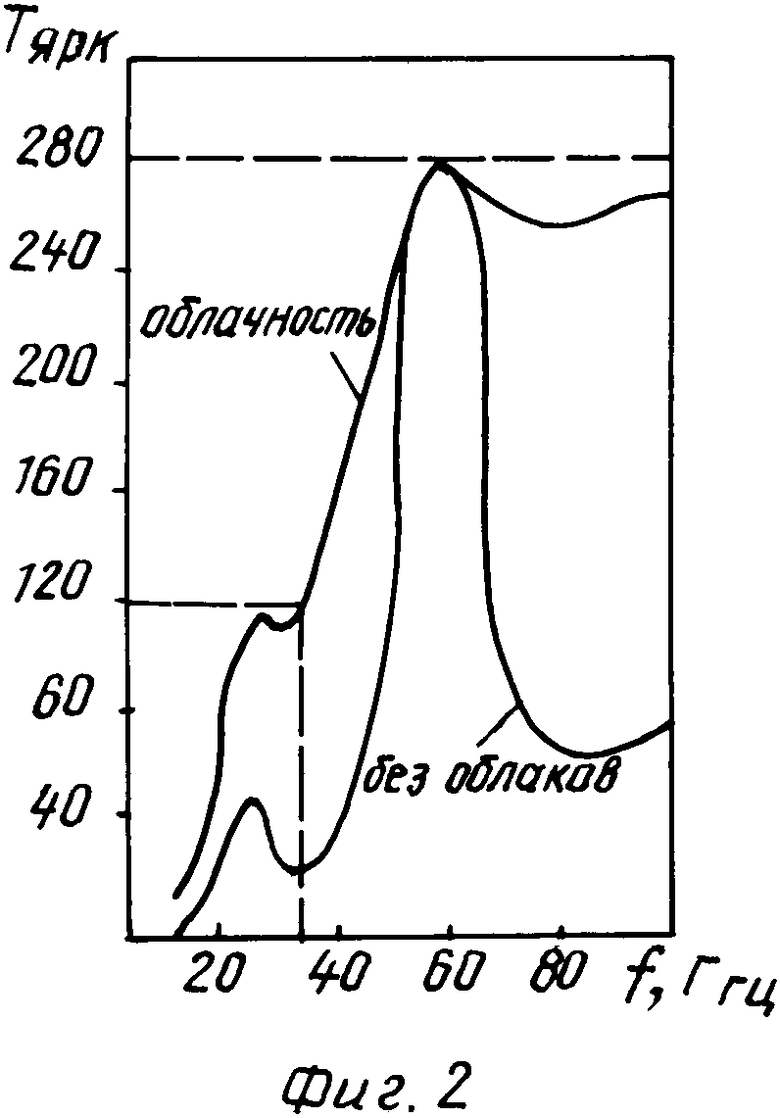
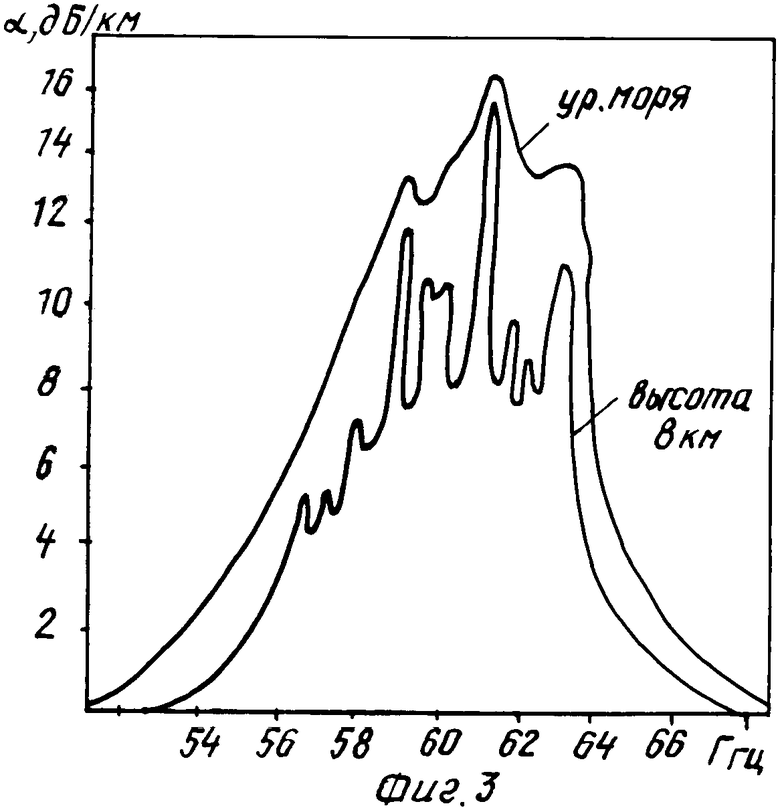
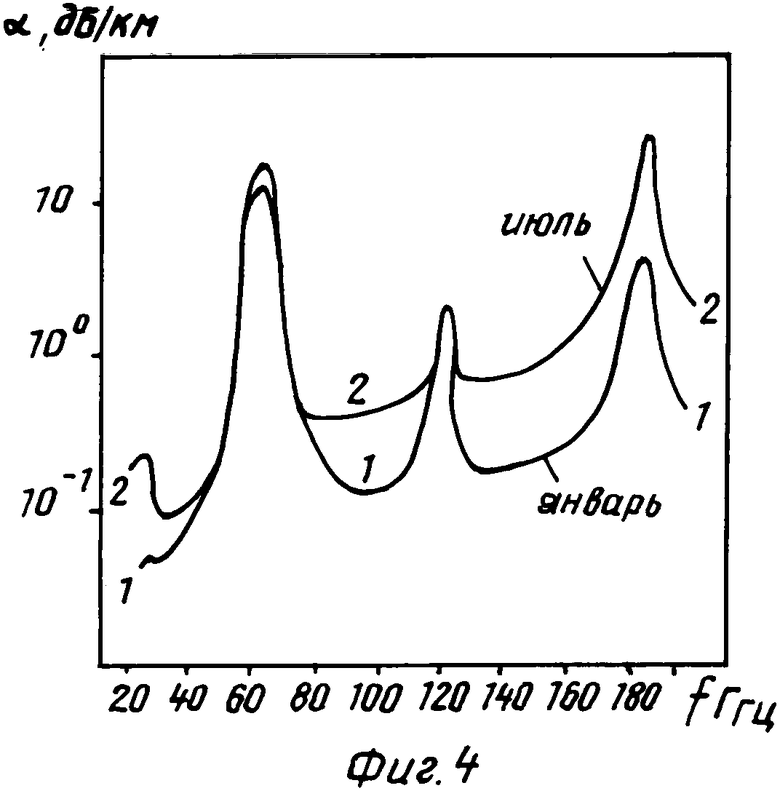
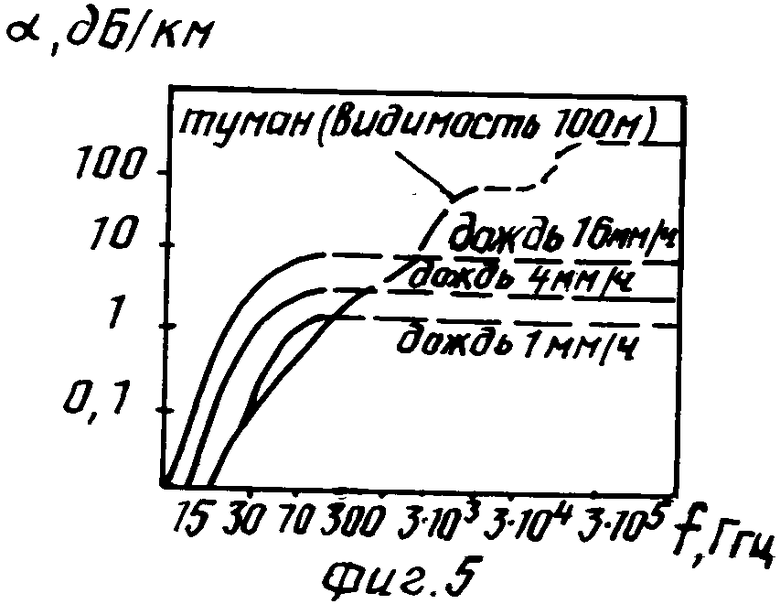
Конкретные значения наиболее приемлемого частотного диапазона могут быть выбраны на основе анализа экспериментальных данных. На фиг. 2 изображены яркостные температуры неба в зените в диапазоне частот 10-100 ГГц, определяющие максимально достижимые радиояркостные температуры объектов наблюдения; на фиг. 3, 4 приведены частотные зависимости коэффициентов затухания электромагнитных волн в атмосфере в ясную погоду; на фиг. 5 - добавки к этим коэффициентам в плохую погоду (дождь, туман).
Известно, что радиотепловой контраст металлических объектов на окружающем фоне создается отражением металлическими поверхностями "холодного" неба и зависит от радиояркостной температуры неба в зените, причем окружающим фоном может быть как поверхность земли, так и небо под малым углом к горизонту. На частотах ниже 30 ГГц радиотепловой контраст неба в зените и неба под малым углом к горизонту слишком мал, поэтому диапазон частот ниже 30 ГГц не может быть использован для реализации данного технического предложения. Из графика зависимости исходной яркостной температуры в зените при ясной погоде и облачности (см. фиг. 2) видно, что диапазон выше 60 ГГц обуславливает малый радиотепловой контраст объекта при облачной погоде и поэтому также не может использоваться. Из графиков зависимости затухания в атмосфере от частоты (см. фиг. 3 и 4) также следует, что максимальная крутизна зависимости коэффициента затухания от частоты лежит в пределах диапазона 52-58 ГГц. Поэтому наиболее приемлемым диапазоном является диапазон 52-68 ГГц, так как он удовлетворяет всем перечисленным условиям. Из графика зависимости дополнительного затухания сигналов в атмосфере от частоты при дожде и тумане (см. фиг. 5) видно, что затухание, обусловленное атмосферными осадками и туманом в выбранном диапазоне частот, существенно не влияет на крутизну зависимости коэффициента затухания от частоты, т. е. на α2- α1. Поэтому атмосферные осадки не очень сильно влияют на точность измерения дальности, снижая при этом лишь чувствительность и предельную дальность действия устройства, так как при работе дальномера должно выполняться условие ΔТ > ΔТмин.
Проиллюстрируем правильность выбора рабочего диапазона частот путем анализа численного решения уравнения (1) на ЭВМ. Для этого зададим следующие сходные данные, приближенные к реальным условиям работы дальномера: определяемая дальность R = 100 м, полоса принимаемых частот ΔF = 2 ГГц, ширина полосы пропускания узкополосных фильтров в двухканальной части ΔF1, ΔF2 = 500 МГц, расстояние между центрами полос пропускания узкополосных фильтров 1,5 ГГц.
Выберем следующие диапазоны измерения в ГГЦ: 5,-52; 52-54; и т. д. до 68-70. Меняя измеряемую дальность от 100 до 10 м с шагом 10 м, получим семейство кривых, отображающих величины в зависимости от частоты. Значения α были получены из графика, приведенного фиг. 2, т. е. для хорошей погоды и для уровня моря. График рассчитанной на ЭВМ зависимости (S2-S1)/ ΔТмин от центральной рабочей частоты в выбранном диапазоне частот представлен на фиг. 6.
Как видно из графика, изменения величины S2-S1 при изменениях дальности максимальны в рабочих диапазонах частот 54-56 и 62-66 ГГц. Но во втором случае абсолютное значение величины S2-S1 меньше из-за меньшего радиотеплового контраста объектов с фоном. В частотных диапазонах 50-52 и 68-70 ГГц работа невозможна из-за слишком малого относительного изменения величины S2-S1 от дальности. Поэтому работа устройства возможна лишь в выбранном частотном диапазоне 52-68 ГГц, но для устройств с повышенной дальностью фиксации объекта, частотный диапазон должен быть выбран в области 52-58 ГГц.
Важной особенностью предложенного технического решения является сочетание компенсационной схемы радиометра, которая характеризуется наивысшей чувствительностью, с одноканальным КВЧ-трактом. При этом упрощается входной тракт, наиболее дорогой при применении миллиметрового диапазона, отсутствуют модулятор, синхронизирующий генератор и синхронный детектор. Двухканальная схема компенсационного радиометра уменьшает вредное влияние низкочастотных флуктуаций коэффициентов передачи одноканальной части приемного тракта, что повышает чувствительность приемника и в результате точность измерения дальности. Обычно устранение низкочастотных флуктуаций в тракте УПЧ при коэффициенте усиления 50-60 дБ представляет принципиальные трудности для обеспечения высокой флуктуационной чувствительности радиометра. В предлагаемой схеме флуктуации усиления действуют синхронно в обоих каналах и вычитаются в схеме сравнения. Таким образом, сочетание радиометра с повышенной чувствительностью и полосой, выбранной в участке спектра миллиметрового диапазона с максимальным градиентом коэффициента затухания в атмосфере с изменением частоты, позволяет решить поставленную задачу.
Выбор диапазона частот и полос пропускания фильтров в тракте ПЧ неочевиден. С одной стороны, требуется увеличить разность α2-α1, для чего диапазон частот надо выбирать по краям полосы пропускания входного фильтра, но с другой стороны уменьшение полос пропускания ведет к падению чувствительности радиометра, а следовательно, к снижению дальности действия устройства.
Как показал анализ уравнения (1) и численное моделирование на ЭВМ, устройства с повышенной дальностью фиксации объектов имеют полосы пропускания фильтров в двухканальных тракторах, которые должны быть примерно одинаковыми и составлять около половины ширины пропускания входного фильтра. Отсюда следует, что наибольшая дальность достигается, когда края полос пропускания узкополосных фильтров в двухкнальной части совпадают с краями полосы пропускания входного фильтра.
Моделирование также показало, что реальные дальности неоднозначного их определения лежат в таких пределах, что практически ими можно пренебречь во всех реальных условиях применения для наземных транспортных средств.
Расчет показал, что в хорошую погоду предельная дальность действия предложенного устройства с размерами антенны, соизмеримыми с размерами фар автомобиля (объект - легковой автомобиль), реализуемого на современной элементной базе, составляет около 160 м, а в дождь интенсивностью до 4 мм/ч - 80 м.
| название | год | авторы | номер документа |
|---|---|---|---|
| БОРТОВОЙ ПАССИВНЫЙ РАДИОЛОКАЦИОННЫЙ ДАЛЬНОМЕР ДЛЯ НАЗЕМНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 1991 |
|
RU2018871C1 |
| РАДИОМЕТРИЧЕСКИЙ КОМПЛЕКС | 2016 |
|
RU2619916C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ИДЕНТИФИКАЦИИ РАДИОПЕРЕДАТЧИКА ПО ЕГО ИЗЛУЧЕНИЮ В БЛИЖАЙШЕЙ ЗОНЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2364885C2 |
| СИСТЕМА АДАПТИВНОЙ КОМПЕНСАЦИИ РАДИОМЕТРИЧЕСКОГО КОНТРАСТА НАЗЕМНЫХ ОБЪЕКТОВ | 2002 |
|
RU2214578C1 |
| НУЛЕВОЙ РАДИОМЕТР | 2016 |
|
RU2619841C1 |
| Способ измерения толщины слоя нефти (нефтепродуктов), разлитой на водной поверхности | 2016 |
|
RU2650699C1 |
| Способ навигации летательных аппаратов и устройство для его осуществления | 2019 |
|
RU2707269C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СОПРОВОЖДЕНИЯ ЦЕЛИ | 1997 |
|
RU2114444C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ МОНОИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 1997 |
|
RU2117960C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАДИОМЕТРИЧЕСКИХ КОНТРАСТОВ ЦЕЛЕЙ И РАДИОМЕТР ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2285940C2 |

Использование: радиотехника, в частности для определения дальности до препятствий для наземных транспортных средств. Сущность изобретения: дальномер содержит антенну 1, входной полосно-пропускающий фильтр 2, преобразователь частоты 3, усилитель промежуточной частоты 4, два фильтра 5, два детектора 6, два интегрирующих блока 7, два усилителя 8, один блок вычисления дальности 9. Цель изобретения - упрощение и повышение точности определения дальности до металлических объектов. 1 з.п. ф-лы, 6 ил.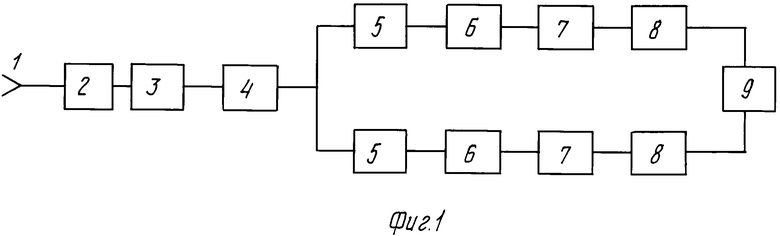
| Патент США N 3117228, кл | |||
| Питательное приспособление к трепальной машине для лубовых растений | 1923 |
|
SU343A1 |
