Изобретение относится к радиолокационной технике и может быть использовано в когерентно-импульсных радиолокационных станциях (РЛС) с моноимпульсным принципом пеленгации, в частности в РЛС, использующих сложные, в частности, фазоманипулированные сигналы, и установленных на подвижных носителях.
В настоящее время в моноимпульных РЛС применяется способ сопровождения по дальности и угловым координатам, при котором принимаемые высокочастотные сигналы после суммарно-разностного преобразования поступают на смесители суммарного и разностного приемных каналов, где преобразуются в сигналы промежуточной частоты, которые усиливаются в усилителях промежуточной частоты (УПЧ), а затем подаются на амплитудный детектор - в суммарном канале и на фазовый детектор, при этом сигнал промежуточной частоты суммарного канала играет роль опорных колебаний. В результате фазового детектирования образуется сигнал углового рассогласования, используемый для углового сопровождения [1, с.22, рис. 1.9].
Наиболее близкой по технической сущности к предлагаемой является моноимпульсная РЛС сопровождения цели [2, с. 20, рис. 15]. Эта РЛС содержит последовательно соединенные синхронизатор, передатчик, переключатель прием-передача, суммарно-разностный преобразователь и антенну, последовательно соединенные смеситель и усилитель промежуточной частоты в суммарном канале, последовательно соединенные смеситель, усилитель промежуточной частоты и фазовый детектор с видеофильтром в разностном канале, а также видеофильтр в суммарном канале, дальномер и последовательно соединенные интегратор ошибок углового рассогласования и привод антенны, кинематически связанный с антенной, причем сигнальный вход смесителя суммарного канала соединен с третьим плечом переключателя прием-передача, сигнальный вход смесителя разностного канала соединен с вторым выходом суммарно-разностного преобразователя, гетеродинные входы смесителей и разностного каналов объединены и подключены к выходу генератора гетеродинной частоты, а выход синхроимпульсов синхронизатора соединен также с соответствующим входом дальномера.
В устройстве-прототипе сигнал суммарного канала после амплитудного детектирования поступает на временной дискриминатор, входящий в блок сопровождения по дальности [2, с.20, рис. 15], в котором образуется сигнал рассогласования (ошибки) по дальности, используемый затем для сопровождения по дальности.
Недостатком устройства-прототипа является его низкая помехозащищенность по отношению к пассивным помехам - отражениям от протяженных местных предметов, таких, например, как береговая черта при обнаружении надводных кораблей (НК), находящихся вблизи берега, а также облако дипольных отражателей (ДО), выставляемое НК на сравнительно небольшой высоте 50 - 100 м с задачей срыва сопровождения. В ситуациях, когда направление береговой черты (БЧ) в зоне наблюдения близко или совпадает с направлением распространения излучения РЛС, разрешающая способность по углу, определяемая диаграммой направленности антенны (ДНА) РЛС, может оказаться недостаточной для пространственного разделения сигналов от НК и от БЧ (или ДО), находящихся на одинаковых дальностях. Тогда применение устройства-прототипа приведет к наведению на энергетический центр системы НК-БЧ или НК-ДО, а в дальнейшем при сближении и при достаточной интенсивности помех может произойти срыв сопровождения по дальности и угловым координатам.
Проиллюстрируем сказанное следующим примером.
Пусть РЛС, установленная на летательном аппарате (ЛА), осуществляет наблюдение НК, расположенного вблизи берега (фиг. 12), причем угловое разрешение за счет реальной ДНА отсутствует, то есть
где
X - расстояние между НК и береговой чертой в направлении, перпендикулярном направлению распространения;
R - дальность до НК;
φ0,5 - ширина ДНА по уровню "-3 дБ".
Например, это имеет место при X = 300 м, R = 10 км и φ0,5= 0,15 рад.
Для эффективной отражающей поверхности (ЭОП) участка берега, попадающего в импульсный объем, получим
где
ΔR - разрешение по дальности;
ϑ - угол скольжения;
σ° - удельная ЭОП берега.
В частности, при малых углах скольжения, например,
где
H - высота полета ЛА,
получим при ΔR = 300 м, X = 300 м, R = 10 км и φ0,5= 0,15 рад, σ° = 0,03 (-15дБ- [3, с. 296, рис. 22)], σδ = 1,2•103•300•0,03=1,2•104 м2
Таким образом, даже при предварительном наведении антенны РЛС на НК с ЭОП σц ≅ 5•103м2 (например, по информации от навигационной системы), энергетический центр отражений будет сильно смещен в сторону береговой черты, что и приведет с большой вероятностью к срыву сопровождения по угловой координате. Аналогичная картина имеет место и с сопровождением по дальности.
В РЛС, использующих, в частности, фазоманипулированные (ФМ) сигналы с большой базой
N = TиΔf ≫ 1, (1)
где
TИ - длительность импульса сигнала;
Δf - ширина спектра сигнала,
кроме этого, устройство-прототип обладает недостаточной точностью измерения угловой координаты.
В настоящее время оптимальная фильтрация сложных, в частности, ФМ сигналов (сжатие по времени) с большой длительностью (TИ > 50 мкс) на высокой или промежуточной частоте в моноимпульсных РЛС практически нереализуема уже потому, что не удается обеспечить достаточно высокую идентичность устройств сжатия на радиочастотах для того, чтобы паразитный фазовый сдвиг между суммарным и разностным каналами, во всяком случае, не превосходил  . Поэтому наиболее рациональным способом оптимальной обработки ФМ сигналов большой длительности является их сжатие по времени на видеочастоте средствами цифровой вычислительной техники.
. Поэтому наиболее рациональным способом оптимальной обработки ФМ сигналов большой длительности является их сжатие по времени на видеочастоте средствами цифровой вычислительной техники.
С другой стороны, образование сигнала углового рассогласования путем применения фазового детектора, включенного между выходами УПЧ суммарного и разностного каналов и осуществляющего перемножение ФМ сигналов суммарного и разностного каналов до сжатия с последующей низкочастотной фильтрацией, приводит к сравнительно низкой точности измерения угла и недостаточной помехозащищенности по отношению к шумовым помехам. Дело заключается в том, что при больших отношениях сигнал/шум (ρ ≫ 1) главной шумовой компонентой на выходе фазового детектора, осуществляющего операцию перемножения поддаваемых на его входы колебаний и низкочастотную фильтрацию результатов перемножения, является составляющая, представляющая произведение напряжения сигнала в суммарном канале на напряжение шумов в разностном канале (вблизи равносигнального направления). Однако в случае ФМ сигналов с большой базой отношение сигнал/шум до сжатия ρ0 обычно мало, то есть ρ0≪ 1, и тогда главный шумовой компонентой на выходе упомянутого выше фазового детектора (ФД) является составляющая, представляющая произведение напряжения шумов в суммарном канале на напряжение шумов в разностном канале. Именно это обстоятельство и является причиной сравнительно низкой точности измерения и помехозащищенности устройства-прототипа.
Проиллюстрируем сказанное следующим расчетом. Выражения (2) и (3) для дисперсии процесса σ имеют вид
имеют вид
где
σ
UС -амплитуда сигналов в суммарном приемном канале на входе ФД;
gΔ - усиление антенны разностного канала, нормированное к усилению антенны суммарного канала (по полю);
K - коэффициент пропорциональности.
Точность единичного измерения углового рассогласования определяется соотношением
где - крутизна пеленгационной характеристики [4, с. 130].
- крутизна пеленгационной характеристики [4, с. 130].
Для простых импульсных сигналов N=1,
тогда из (2) - (4) получим
а для ФМ сигналов при N>>1, наоборот ρ0≪ 1,, тогда
При одинаковой энергии принимаемых сигналов ρ = Nρ0, как видно из (6), для ФМ сигналов в устройстве-прототипе дисперсия измерения получается сравнительно большой, а точность, следовательно, сравнительно невысокой.
Кроме того, при воздействии шумовой помехи отношения сигнал/шум ρ и ρ0 уменьшаются, при этом σ , не как
, не как  - в случае простых сигналов, то есть помехозащищенность устройства-прототипа по отношению к шумовым помехам также является низкой.
- в случае простых сигналов, то есть помехозащищенность устройства-прототипа по отношению к шумовым помехам также является низкой.
Технической задачей изобретения является повышение помехозащищенности сопровождения по отношению к пассивным и активным шумовым помехам при одновременном повышении точности сопровождения в РЛС, использующих сложные, в частности, ФМ сигналы и установленных на подвижных носителях.
Для достижения предлагаемого технического результата предлагается после выделения сигнала от истинной цели на фоне мешающих отражений от пассивных помех путем узкополосной доплеровской фильтрации организовать затем сопровождение цели по доплеровской частоте, то есть по радиальной скорости цели относительно РЛС, обеспечив, тем самым, адаптивную фильтрацию эхосигналов в процессе сопровождения, и отфильтрованные таким путем сигналы от истинной цели использовать затем для сопровождения по дальности и по угловым координатам, причем при сопровождении по угловым координатам образовать сигнал углового рассогласования после согласованной фильтрации видеоимпульсов и узкополосной доплеровской фильтрации в суммарном и разностном каналах путем попарного перемножения одноименных квадратурных составляющих сигналов с суммированием этих произведений.
Сущность изобретения заключается в том, что в моноимпульсную РЛС сопровождения цели, содержащую последовательно соединенные синхронизатор, передатчик, переключатель прием-передача, суммарно-разностный преобразователь и антенну, последовательно соединенные смеситель промежуточной частоты в суммарном канале, последовательно соединенные смеситель, усилитель промежуточной частоты и фазовый детектор с видеофильтром в разностном канале, а также видеофильтр в суммарном канале, дальномер и последовательно соединенные интегратор ошибок углового рассогласования и привод антенны, кинематически связанный с антенной, причем сигнальный вход смесителя канала соединен с третьим плечом переключателя прием-передача, сигнальный вход смесителя разностного канала соединен с вторым выходом суммарно-разностного преобразователя, гетеродинные входы смесителей суммарного и разностного каналов объединены и подключены к выходу генератора гетеродинной частоты, а выход синхроимпульсов синхросигнала соединен также с соответствующим входом дальномера, введены блок смещения частоты, два фазовых детектора и видеофильтр в суммарном канале, дополнительный фазовый детектор с видеофильтром в разностном канале, фазовращатель на 90o, последовательно соединенные по двум линиям первый двухканальный блок ключей и блок доплеровских фильтров, последовательно соединенные блок анализа и решений и первый сумматор, последовательно соединенные по двум линиям второй двухканальный блок ключей и частотный дискриминатор, последовательно соединенные по двумя линиям доплеровский фильтр нижних частот суммарного канала и блок объединения квадратур, последовательно соединенные по двум линиям через соответствующие перемножители доплеровский фильтр нижних частот разностного канала и второй сумматор, а также преобразователь код-временной интервал и ключ, причем передатчик содержит последовательно соединенные возбудитель, включающий генераторы сигнальной, гетеродинной и опорной частот, и усилитель мощности, выход которого является выходом передатчика, а также импульсный модулятор, вход которого является входом передатчика, а выход соединен с управляющим входом усилителя мощности, выход опорной частоты возбудителя через блок смещения частоты соединен с объединенными входами опорной частоты первых фазовых детекторов в суммарном и разностном каналах непосредственно, а с объединенными входами опорной частоты вторых фазовых детекторов в суммарном и разностном каналах - через фазовращатель на 90o, объединенные входы первого и второго фазовых детекторов суммарного канала соединены с выходом усилителя промежуточной частоты суммарного канала, а их выходы соединены через соответствующие видеофильтры с объединенными между собой одноименными входами первого и второго блока ключей и доплеровского фильтра нижних частот суммарного канала, объединенные входы первого и второго фазовых детекторов разностного канала соединены с выходом усилителя промежуточной частоты разностного канала, а их выходы соединены через соответствующие видеофильтры с соответствующими входами доплеровского фильтра нижних частот разностного канала, многоканальный выход блока доплеровских фильтров соединен поканально с многоканальным входом блока анализа и решений, второй вход первого сумматора подключен к выходу частотного дискриминатора, а выход первого сумматора - к второму информационному входу блока смещения частоты, выход блока объединения квадратур соединен с сигнальным входом дальномера, вход начальной дальности и командный вход которого подключены соответственно к одноименным выходам блока анализа и решений, выход кода дальности которого соединен через преобразователь код-временной интервал с управляющим входом первого блока ключей, первый и второй входы блока объединения квадратур соединены также с вторыми входами первого и второго перемножителей соответственно, выход дальномера соединен с управляющими входами второго блока ключей и ключа, сигнальный вход которого соединен с выходом второго сумматора, а выход - с входом интегратора, выход синхроимпульсов частоты повторения синхросигнала подключен также с объединенным соответствующим входам преобразователя код-временной интервал, дальномера, блока доплеровских фильтров, частотного дискриминатора, а также доплеровских фильтров нижних частот суммарного и разностного каналов, а выход тактовых импульсов синхронизатора подключен к объединенным тактовым входам блока смещения частоты, преобразователя код-временной интервал и дальномера.
Согласно изобретению принимаемые сигналы как в суммарном, так и в разностном приемных каналах после усиления на промежуточной частоте преобразуются на видеочастоту посредством фазового детектирования при помощи опорных колебаний, генерируемых возбудителем передатчика, с формированием двух квадратурных составляющих для каждого сигнала, затем производится согласованная фильтрация (СФ) квадратурных составляющих импульсных сигналов на видеочастоте, которая приводит к сжатию по времени, а результате чего на выходах квадратурных каналов отношение сигнал/шум по мощности повышается в N раз, при этом получаются сжатые сигналы
UΣcosϕ,UΣsinϕ,UΔcosϕ,UΔsinϕ,
где
ϕ - начальная фаза принимаемых сигналов относительно опорных колебаний;
UΣ,UΔ - амплитуда сигналов после СФ в суммарном и разностном приемных каналах соответственно, причем величина UΔ может быть как положительной, так и отрицательной (в зависимости от положения направления на цель относительно равносигнального направления).
Далее огибающая суммарного сигнала подвергается многоканальной доплеровской фильтрации в диапазоне частот Доплера FД
где
FП - частота повторения зондирующих импульсов РЛС, - с полосой ΔF , определяемой шириной спектра межпериодных флюктуаций истинной цели, то есть НК, и числом частотных каналов  , которая производится для каждого из элементов ni (i = 1, 2, ... nR) разрешения по дальности (в частности, поочередно) в зоне возможного положения цели, определяемой точностью целеуказания до нахождения цели.
, которая производится для каждого из элементов ni (i = 1, 2, ... nR) разрешения по дальности (в частности, поочередно) в зоне возможного положения цели, определяемой точностью целеуказания до нахождения цели.
После проведения многоканальной доплеровской фильтрации (многоканальность необходима, так как скорость НК относительно РЛС заранее не известна) предлагается определить по заданному уровню ширину спектра с наиболее мощной спектральной составляющей из числа составляющих, превысивших порог обнаружения, определяемый допустимой вероятностью ложного обнаружения за счет шумов - и сравнить ее с заранее выбранным пороговым значением, при превышении которого принимается решение о наличии ложной цели и о переходе к анализу следующего элемента дальности, а при отсутствии превышения, то есть при наличии мощной узкополосной спектральной составляющей, - о наличии сигнала от НК. В этом последнем случае предлагается найти значение доплеровской частоты F*, соответствующее максимуму спектра, (то есть соответствующее радиальной скорости НК относительно РЛС), а затем, изменив на эту величину частоту опорных колебаний, определять далее сигнал рассогласования по частоте между значением этой поправки и измеренным текущим значением F* и, замыкая контур сопровождения по частоте, использовать этот сигнал для ее подстройки. В процессе сопровождения по частоте частота F* = 0 (с точностью порядка ΔF), поэтому дальше предлагается производить фильтрацию комплексной огибающей последовательности импульсных сигналов в суммарном и разностном приемных каналах на нулевой доплеровской частоте и после этой фильтрации, образуя сигнал рассогласования в суммарном канале известным образом, например, методом двух полустробов (например, [2, с. 53, рис.41]), замкнуть контур сопровождения по дальности, подстраивая, как обычно, сигналом рассогласования положение строба дальности. Далее, предлагается образовать сигнал углового рассогласования не путем перемножения сигналов на промежуточной частоте - как в прототипе, а путем попарного перемножения сигналов одноименных квадратур в суммарном и разностном каналах после согласованной фильтрации и узкополосной фильтрации на нулевой доплеровской частоте с последующим суммированием результатов перемножения, а затем замкнуть контур сопровождения по углу, подстраивая сигналом рассогласования положение антенны, причем контур углового сопровождения стробируется как обычно стробом дальности.
На фиг. 1 изображена структурная схема РЛС; на фиг, 2 - структурная схема возбудителя (В) передатчика; на фиг. 3 - структурная схема блока смещения частоты (БСЧ); на фиг. 4 - структурная схема преобразователя код-частота (ПКЧ); на фиг. 5 - структурная схема двойного балансного модулятора (ДБМ); на фиг. 6 - структурная схема блока доплеровских фильтров (БДФ); на фиг. 7 - структурная схема частотного дискриминатора (ЧД); на фиг. 8 - структурная схема доплеровского фильтра (ДФr), настроенного на частоты ±rΔF; на фиг. 9 - структурная схема доплеровского фильтра (ДФ0), настроенного на нулевую частоту; на фиг. 10 - структурная схема дальномера (Д); на фиг. 11 - схема программы блока анализа и решений (БАР); на фиг. 12 - схема расположения в горизонтальной плоскости РЛС и объектов наблюдения.
На фиг. 1 представлена структурная схема РЛС, на которой обозначения:
1 - возбудитель (В); 2 - усилитель мощности (УМ); 3 - переключатель прием-передача (ППП); 4 - суммарно-разностный преобразователь (СРП); 5 - антенна (А); 6 - импульсный модулятор (ИМ); 7 - синхронизатор (С); 8 - блок смещения частоты (БСЧ); 9 и 10 - фидеофильтры суммарного канала; 11 - смеситель суммарного канала (CмΣ); 12 - смеситель разностного канала (CмΔ); 13 - усилитель промежуточной частоты суммарного канала (УПЧΣ); 14 - усилитель промежуточной частоты разностного канала (УПЧΔ); 15 - 18 - фазовые детекторы (ФД); 19 - фазовращатель (ФВ); 20 и 21 - видеофильтры разностного канала; 22 - первый блок ключей (БКI); 23 - блок доплеровских фильтров (БДФ); 24 - блок анализа и решений (БАР); 25 - преобразователь код-временной интервал (ПКВИ); 26 - первый сумматор (+1); 27 - второй блок ключей (БК2); 28 - частотный дискриминатор (ЧД); 29 - доплеровский фильтр нижних частот суммарного канала (ДФ0Σ); 30 - доплеровский фильтр нижних частот разностного канала (ДФ0Δ) ; 31 и 32 - перемножители; 33 - блок объединения квадратур (БОК); 34 - второй сумматор (+2); 35 - дальномер (Д); 36 - ключ (Кл); 37 - интегратор ошибок углового рассогласования (∫); 38 - привод антенны (ПрА);
На схеме фиг. 1 последовательно соединены возбудитель 1, усилитель 2 мощности, переключатель 3 прием-передача, суммарно-разностный преобразователь 4 и антенна 5, последовательно соединены смеситель 11 суммарного канала, вход которого подключен к третьему плечу переключателя 3, усилитель 13 промежуточной частоты, фазовый детектор 15 и видеофильтр 9, последовательно соединены фазовый детектор 16, вход которого соединен с выходом усилителя 13, и видеофильтр 10, последовательно соединены смеситель 12, вход которого подключен к выходу разностного сигнала суммарно-разностного преобразователя 4, а гетеродинный вход объединен в гетеродинным входом смесителя 11 и подключен к выходу гетеродинной частоты возбудителя 1, усилитель 14 промежуточной частоты разностного канала, фазовый детектор 17 и видеофильтр 20, последовательно соединены фазовый детектор 18, вход которого соединен с выходом усилителя 14, и видеофильтр 21. Выходы первого и второго видеофильтров 9 и 10 суммарного канала соединены с соответствующими входами первого блока 22 ключей, выходы которого соединены с соответствующими входами блока 23 доплеровских фильтров, второго блока ключей 27, выходы которого соединены с соответствующими входами частотного дискриминатора 28, доплеровского фильтра 29, выходы которого соединены с соответствующими входами блока 33 объединения квадратур. Выходы первого и второго видеофильтров 20 и 21 разностного канала соединены с соответствующими входами доплеровского фильтра 30, выходы которого через соответствующие перемножители 31 и 32 соединены с соответствующими входами двухвходового сумматора 34. Входы опорной частоты фазовых детекторов 15, 17 и 16, 18 одноименных квадратур попарно объединены между собой и подключены к выходу блока 8 смещения частоты, первая пара - непосредственно, а вторая пара - через фазовращатель 19. Первый и второй выходы доплеровского фильтра 29 соединены также с вторыми входами перемножителей 31 и 32 соответственно.
Многоканальный выход блока 23 доплеровских фильтров соединен поканально с соответствующим многоканальным входом блока 24 анализа и решений, выход 1 кода дальности (1-й выход) которого подключен через преобразователь 25 код-временной интервал к управляющему входу первого блока 22 ключей, а выход 2 частоты Доплера F* соединен с первым входом первого двухвходового сумматора 26, второй вход которого подключен к выходу частотного дискриминатора 28. Третий выход (начальной дальности до цепи R0) блока 24 и четвертый выход - команды на замыкание контура сопровождения по дальности - подсоединены соответственно к второму и третьему входу дальномера 35, выход которого соединен с управляющими входами второго блока 27 ключей и ключа 36, сигнальный вход которого подключен к выходу второго двухвходового сумматора 34, а выход через интегратор 37 углового рассогласования соединен с приводом 38, кинематически связанным с антенной 5.
Первый вход блока 8 смещения частоты соединен с выходом опорной частоты возбудителя 1, второй вход блока 8 смещения частоты соединен с выходом первого двухвходового сумматора 26, третий вход является входом собственной радиальной скорости носителя РЛС, а четвертый вход, объединенный с одноименным входом дальномера 35 и вторым входом (тактовых импульсов) преобразователя 25 код-временной интервал, подключен к первому выходу (тактовых импульсов) синхронизатора 7, второй выход (синхроимпульсов частоты повторения) которого подключен к входу импульсного модулятора 6 и к объединенным входам синхроимпульсов частоты повторения преобразователя 25 код-временной интервал, дальномера 35, блока 23 доплеровских фильтров, частотного дискриминатора 28, а также доплеровских фильтров 29 и 30 нижних частот суммарного и разностного каналов. Блоки 1, 2 и 6 образуют передатчик.
На фиг. 2 представлена структурная схема возбудителя 1, где приняты следующие обозначения:
39 - задающий генератор (ЗГ); 40 - умножитель частоты (УМН); 41 - смеситель (СМ); 42 - генератор опорной частоты (ГОЧ); 43 - 45 - усилители (Ус).
На схеме фиг. 2 последовательно соединены задающий генератор 39, умножитель 40 частоты и усилитель 43, выход которого образует первый выход (колебаний частоты сигнала) возбудителя 1, выход умножителя 40 соединен также через смеситель 41 с усилителем 44, выход которого является вторым выходом (колебаний частоты гетеродина) возбудителя 1, вход смесителя 41 соединен с выходом генератора 42 опорной частоты и входом усилителя 45, выход которого является третьим выходом (колебаний опорной частоты) возбудителя 1.
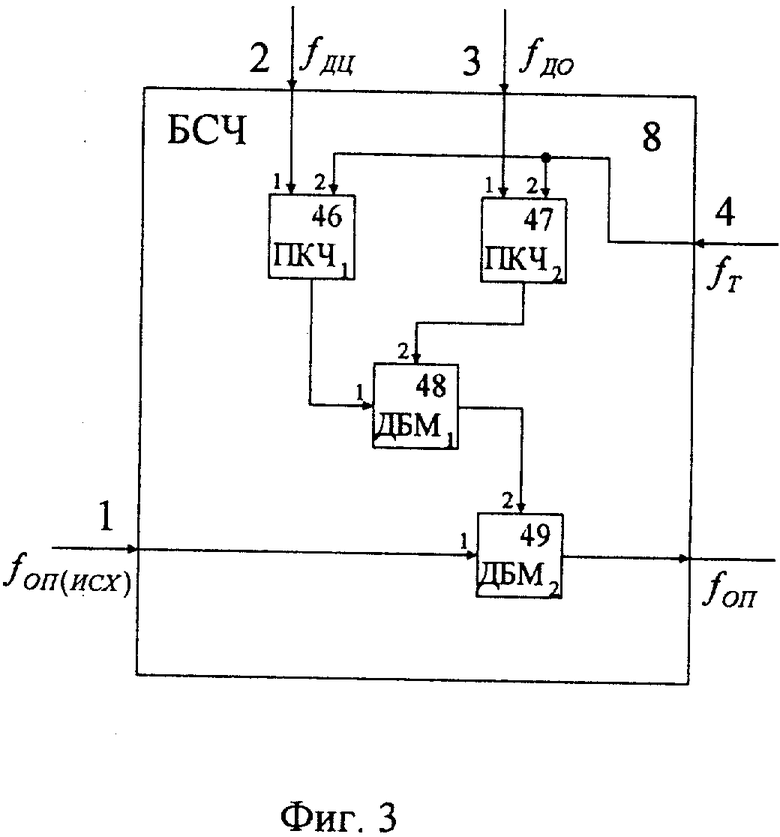
На фиг. 3 представлена структурная схема блока 8 смещения частоты, где приняты следующие обозначения:
46 - первый преобразователь код-частота (ПКЧ1); 47 - второй преобразователь код-частота (ПКЧ2); 48 - первый двойной балансный модулятор (ДБМ1); 49 - второй двойной балансный модулятор (ДБМ2).
На схеме фиг. 3 выход первого преобразователя 46 код-частота через первый двойной балансный модулятор 48 соединен с вторым входом второго двойного балансного модулятора 49, первый вход которого соединен с первым входом блока 8 смещения частоты - колебаний исходной частоты опорных колебаний, а выход образует выход блока смещения частоты, корректированной частоты опорных колебаний, первый вход первого преобразователя 46 код-частота соединен с вторым входом блока 8 смещения частоты (код доплеровской частоты цели), третий вход которого (код доплеровской частоты носителя РЛС) соединен с первым входом второго преобразователя 47 код-частота, вторые входы обоих преобразователей 46 и 47 код-частота объединены и соединены с четвертым входом (тактовых импульсов) блока 8 смещения частоты.
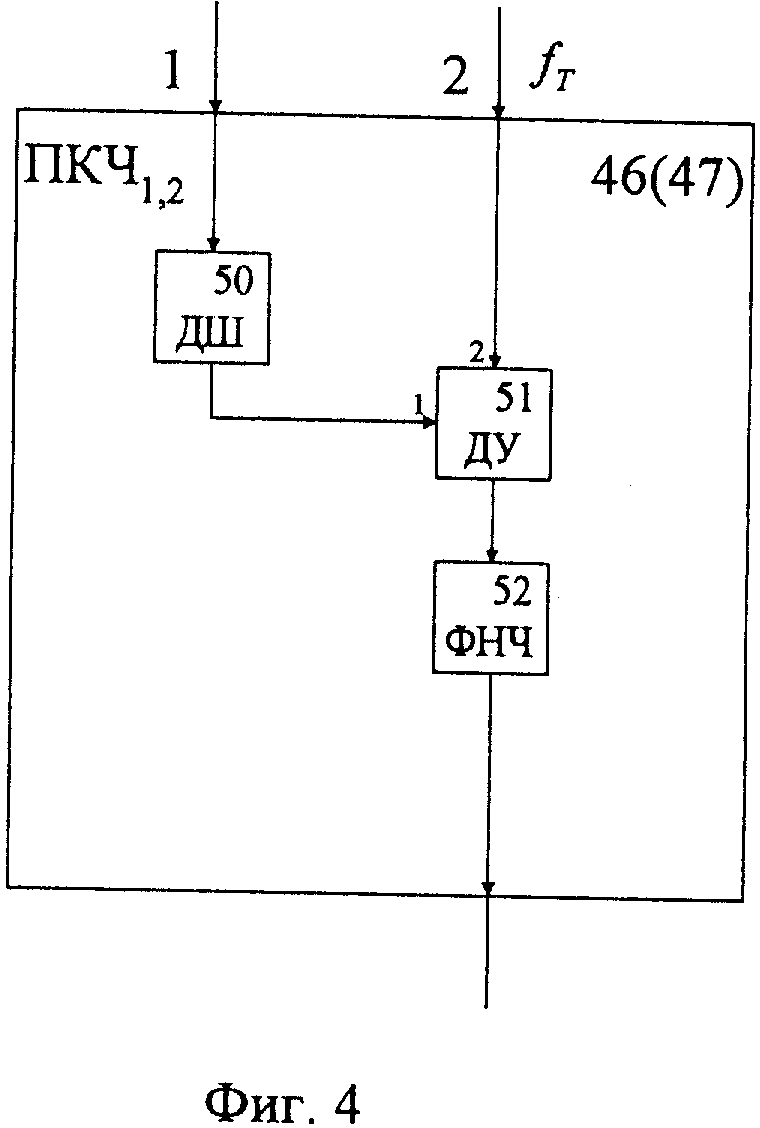
На фиг. 4 представлена структурная схема преобразователей 46 (47) код-частота, где приняты следующие обозначения:
50- дешифратор (Дш); 51 - управляемый делитель (ДУ); 52 - фильтр нижних частот (ФНЧ).
На схеме фиг. 4 последовательно соединен дешифратор 50, управляемый делитель 51 и фильтр 52 нижних частот, причем вход дешифратора 50 образуют первый кодовый вход преобразователя 46 (47) код-частота, второй вход управляемого делителя 51 образует второй вход (тактовых импульсов) преобразователя 46 (47) код-частота, а выход фильтра 52 нижних частот - выход преобразователя 46 (47) код-частота.
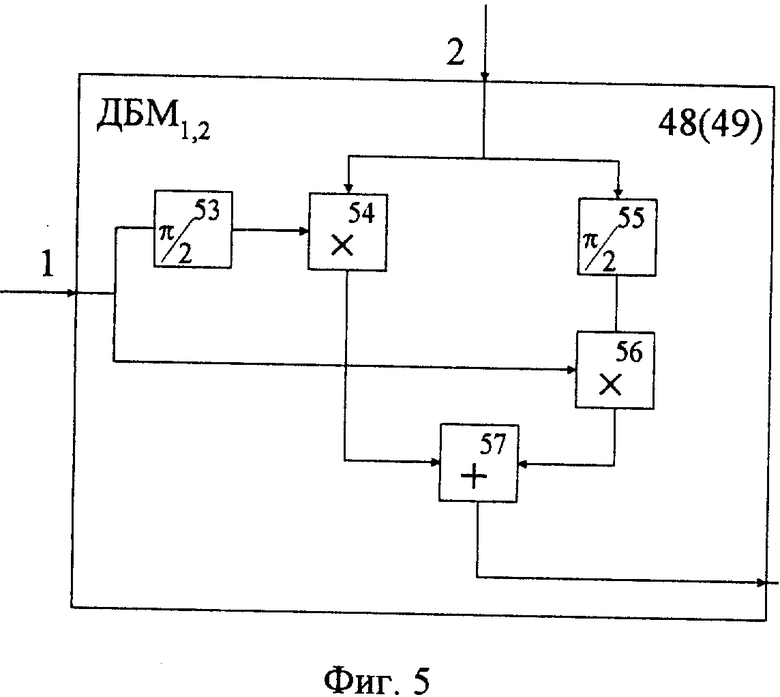
На фиг. 5 представлена структурная схема двойного балансного модулятора 48 (49), где приняты следующие обозначения:
53 и 55 - фазовращатели на  ; 54 и 56 - перемножители (X); 57 - двухвходовый сумматор (+).
; 54 и 56 - перемножители (X); 57 - двухвходовый сумматор (+).
На схеме фиг. 5 последовательно соединены фазовращатели 53 на 90o, перемножитель 54 и сумматор 57, вход фазовращателя 53 на 90o, объединенный с первым входом перемножителя 56, образует первый вход двойного балансного модулятора 48 (49), а второй его вход соединен с вторым входом перемножителя 54 и через фазовращатель 55 на 90o - с вторым входом перемножителя 56, выход которого подключен к второму входу двухвходового сумматора 57, а выход последнего является выходом двойного балансного модулятора 48 (49).
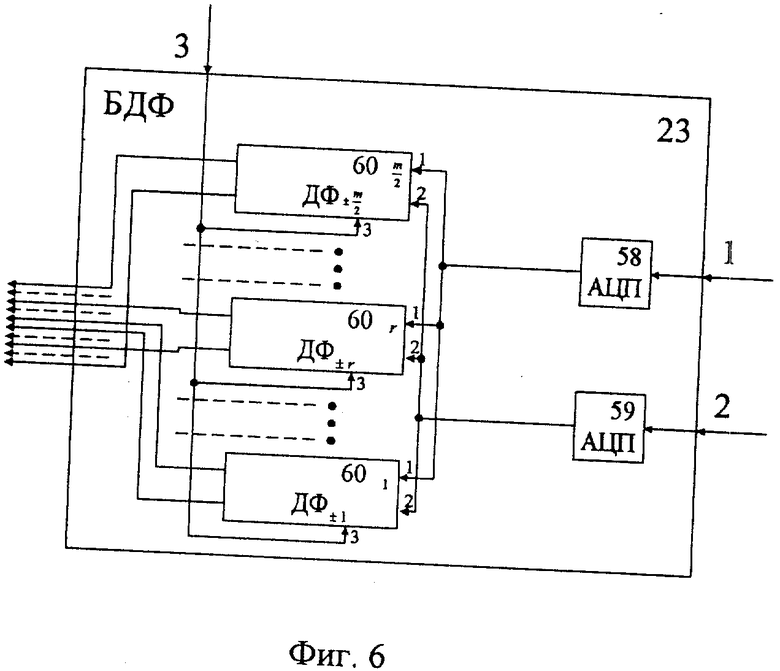
На фиг. 6 представлена структурная схема блока 23 доплеровских фильтров (БДФ), где приняты следующие обозначения:
58 и 59 - аналого-цифровые преобразователи (АЦП); 601 - 60m/2 - доплеровские фильтры частотных каналов.
±ΔF, ... ±rΔF, ... ±m/2 ΔF (ДФ1, ... ДФr, ... ДФm/2)
На схеме фиг. 6 первый и второй входы блока 23 доплеровских фильтров соединены с одноименными входами доплеровских фильтров 60 через аналого-цифровые преобразователи 58 и 59 соответственно, третий вход блока 23 доплеровских фильтров - синхроимпульсов частоты повторения - соединен с одноименными входами доплеровских фильтров 60 непосредственно, выходы же доплеровских фильтров, упорядоченные в порядке возрастания номеров частотных каналов, образуют m-канальный выход блока 23 доплеровских фильтров.
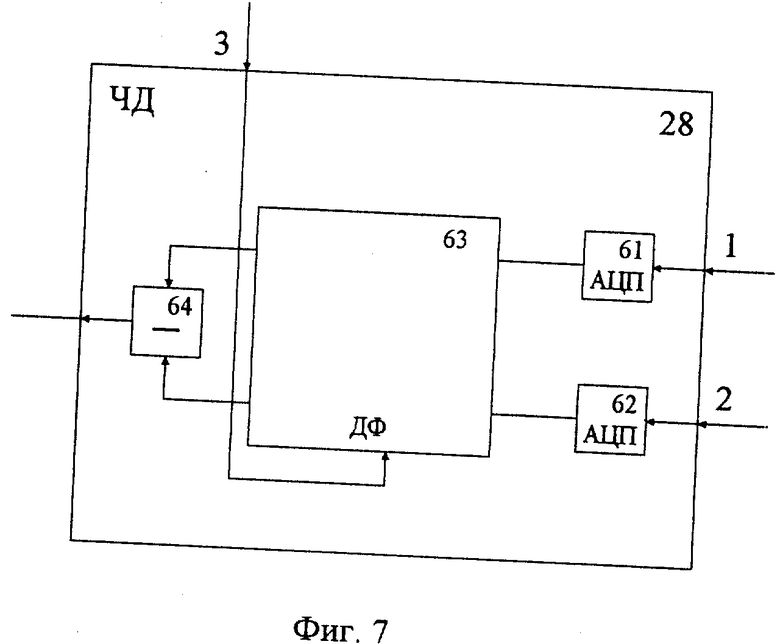
На фиг. 7 представлена структурная схема частотного дискриминатора 28 (ЧД), где приняты следующие обозначения:
61 и 62 - аналого-цифровые преобразователи (АЦП); 63 - блок доплеровских фильтров частотных каналов ±ΔF ; 64 - блок вычитания (-).
На схеме фиг. 7 первый и второй входы блока доплеровских фильтров 63 соединены с одноименными входами частотного дискриминатора 28 через аналого-цифровые преобразователи 61 и 62 соответственно, а третий вход - непосредственно, выходы блока доплеровских фильтров 63 соединены с соответствующими входами блока 64 вычитания, выход которого образует выход частотного дискриминатора 28.
На фиг. 8 представлена структурная схема блока 60r доплеровских фильтров частотных каналов ±rΔF (r = 1, 2, ..., m/2), где приняты следующие обозначения:
65 и 66 - первый и второй блоки n-разрядных сдвиговых регистров соответственно (БСР1, БСР2); 67 и 70 - n-входовые сумматоры с косинусной весовой функцией (BCcos); 68 и 69 - n-входовые весовые сумматоры с синусной весовой функцией (BCsin); 71 и 74 - двухвходовые сумматоры (+); 72 и 73 - блоки вычитания (-); 75 и 76 - блоки объединения квадратур (БОК).
На схеме фиг. 8 первый и второй входы блока 60r доплеровских фильтров соединены с информационными входами первого и второго блоков сдвиговых регистров 65 и 66 соответственно, входы тактовых импульсов последних объединены и подключены к третьему входу блока 60 доплеровских фильтров. Одноименные входы n-входовых весовых сумматоров 67 с косинусной весовой функцией и 68 с синусной весовой функцией попарно соединены между собой и подключены к выходам соответствующих разрядов блока 65 n-разрядных сдвиговых регистров, а одноименные входы n-входовых весовых сумматоров 69 с синусной весовой функцией и 70 с косинусной весовой функцией также попарно соединены между собой и подключены к выходам соответствующих разрядов второго блока 66 n-разрядных сдвиговых регистров, выход весового сумматора 67 подключен к объединенным между собой первым входам двухвходового сумматора 71 и блока 73 вычитания, выход весового сумматора 68 подключен к объединенным между собой первым входам блока 72 вычитания и двухвходового сумматора 74, выход весового сумматора 69 подключен к вторым входам двухвходового сумматора 71 и блока 73 вычитания, а выход весового сумматора 70 подключен к объединенным между собой вторым входам блока 72 вычитания и двухвходового сумматора 74. Выход двухвходового сумматора 71 и блока 72 вычитания соединены с первым и вторым входами блока 75 объединения квадратур соответственно, а выходы блока 73 вычитания и двухвходового сумматора 74 соединены с первым и вторым входами блока 76 объединения квадратур соответственно, выходы блоков 75 и 76 объединения квадратур являются первым и вторым выходами доплеровского фильтра 60r соответственно.
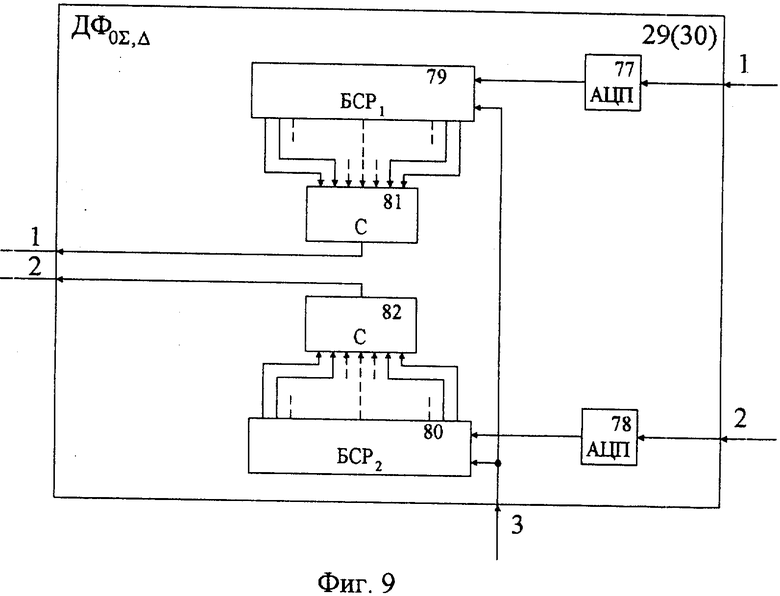
На фиг. 9 представлена структура схема доплеровского фильтра 29 (30) нижних частот (ДФ0Σ,Δ) , где приняты следующие обозначения:
77 и 78 - аналого-цифровые преобразователи; 79 и 80 - первый и второй блоки n-разрядных сдвиговых регистров соответственно (БСР1, БСР2); 81 и 82 - n-входные сумматоры.
На схеме фиг. 9 первый и второй входы доплеровского фильтра 29 (30) соединены с информационными входами первого и второго блоков 79 и 80 сдвиговых регистров соответственно, входы тактовых импульсов БСР 79 и 80 объединены и подключены к третьему входу доплеровского фильтра 29 (30). Выходы всех n разрядов первого и второго блока 79 и 80 сдвиговых регистров соединены поразрядно с соответствующими входами n-входовых сумматоров 81, 82 соответственно, выходы n-входовых сумматоров 81 и 82 соединены соответственно с выходами 1 и 2 доплеровского фильтра 29 (30).
На фиг. 10 представлена функциональная схема дальномера (Д) 35, где приняты следующие обозначения:
83 - временной дискриминатор (ВД); 84 - ключ (Кл); 85 - реверсивный счетчик (РС); 86 - преобразователь код-временной интервал (ПКВИ).
На схеме фиг. 10 последовательно соединены временной дискриминатор 83, ключ 84, реверсивный счетчик 85 и преобразователь 86 код-временной интервал, выход которого является выходом дальномера 35 и вторым входом (строб-импульса) временного дискриминатора 83, вход последнего является первым сигнальным) входом дальномера 35, второй вход (кода начальной дальности) дальномера 35 соединен с вторым входом (начальной установки) реверсивного счетчика 85. Третий вход (командный) дальномера соединен с управляющим входом ключа 84, а четвертый и пятый входы (тактовых импульсов и синхроимпульсов) соответственно - с вторым и третьим входами преобразователя 86 код-временной интервал.
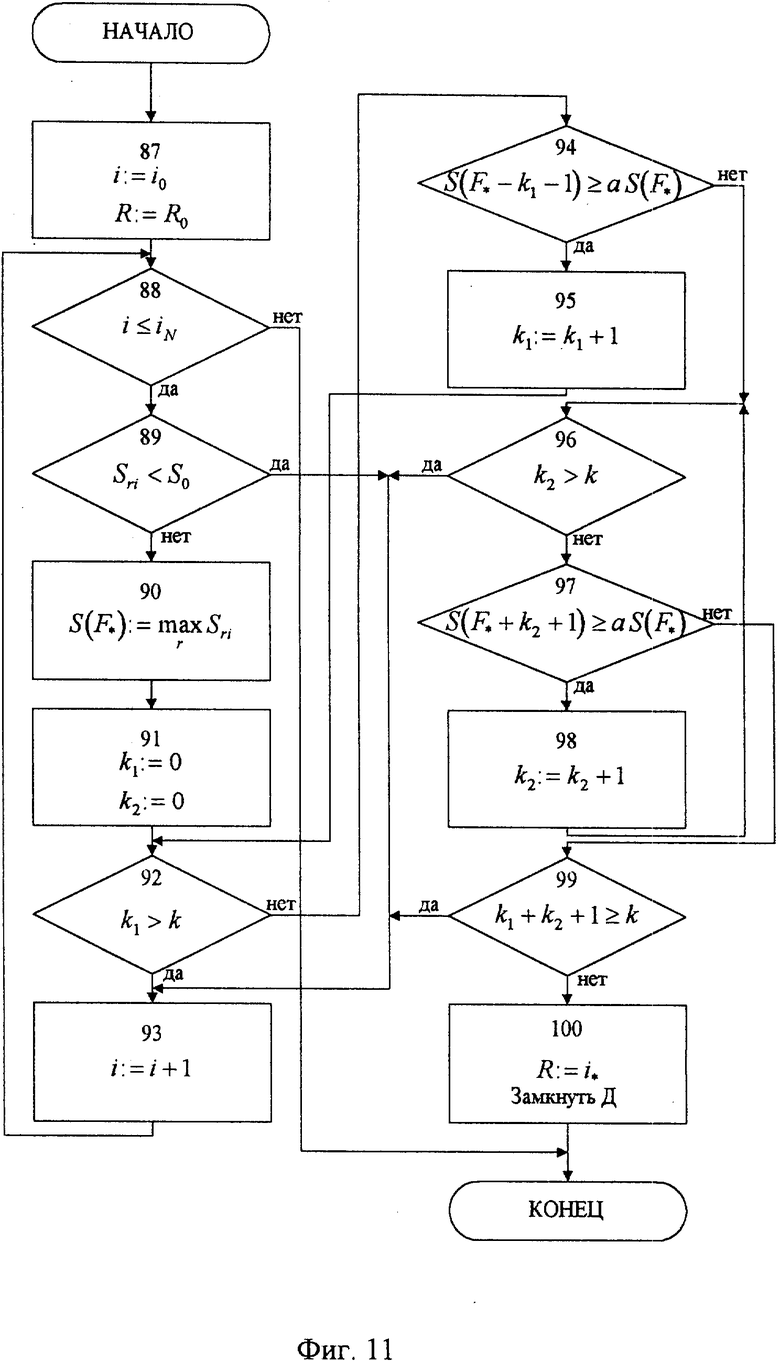
Блок 24 анализа и решения (БАР) может быть выполнен в виде программируемого микропроцессора, схема программы которого представлена на фиг. 11. Она состоит из следующих блоков:
87 - блок присваивания начальных значений переменных счетчик дальности i принимает значения номера начальной дальности i0, код выбранной дальности R - минимальное значение начала зоны R0, сохраняемое при выходе из программы в случае отсутствия реальных целей;
88 - блок проверки достижения номера конечной дальности iN (конец зоны). При невыполнении условия i≤iN производится выход из программы;
89 - блок сравнения сигналов, пропорциональных мощностям спектральных составляющих Sri в диапазоне частот от - FП/2 до FП/2, с порогом обнаружения S0 для i-го элемента дальности, то есть проверка выполнения условия
Sri < S0
для
r = -m/2, ..., m/2 (m - частное).
При выполнении этого условия производится переход к следующему элементу дальности (блок 93), при невыполнении - к блоку 90;
90 - блок нахождения максимального значения спектральной составляющей
затем переход к блоку 91;
91 - блок обнуления параметров циклов к1, к2, затем переход к блоку 92;
92 - проверка условия выхода из цикла по к1 при достижении максимального значения к. При выполнении условия к1 ≥ к производится переход к следующему элементу дальности (блок 93), при невыполнении к блоку 94. Этой проверкой исключается возможность зацикливания программы при неограниченном увеличении параметра цикла к1;
94 - блок нахождения нижней граничной частоты спектра с максимальной спектральной составляющей путем определения минимального целого числа к1, не удовлетворяющему условию
S(F* - к1 - 1)≥aS(F*),
где
a < 1 - выбранный заранее относительный уровень отсчета ширины спектра (например, a = 0,5). При выполнении этого условия производится переход к блоку 95, при невыполнении - к блоку 96;
95 - блок увеличения значения параметра цикла к1 на 1 с последующим переходом к проверке его значения в блоке 92;
96 - блок проверки условия выхода из цикла по к2 при достижении им максимального значения к. При выполнении условия к2 ≥ к производится переход к следующему элементу дальности (блок 93), при невыполнении - к блоку 97;
97 - блок нахождения верхней граничной частоты спектра с максимальной спектральной составляющей путем определения минимального целевого числа к2, не удовлетворяющего условию
S(F* + к2 + 1 )≥aS(F)
При выполнении этого условия производится переход к блоку 98, при невыполнении - к блоку 99;
98 - блок увеличения значения параметра цикла на 1 с последующим переходом к проверке его значения в блоке 96;
99 - блок сравнения спектра с максимальной спектральной составляющей с пороговым значением "к" путем проверки условия.
к1 + к2 +1 ≥ к.
Если это условие выполняется, производится переход к следующему элементы дальности (блок 93), в противном случае - переход к блоку 100;
100 - блок присваивания величины R = R* кода, выбранного для сопровождения элемента дальности i*, выдачи значения R* на дальномер 35 и выдачи значения частоты F* через двухвходовый сумматор на блок 8 смещения частоты. Начальное значение R0, оставшееся после присваивания в блоке 87 в случае отсутствия реальной цели, означает отсутствие цели для сопровождения либо вследствие ее необнаружения, либо вследствие классификации всех целей в заданном диапазоне дальностей как помех.
Предлагаемая РЛС работает следующим образом.
Перед началом работы РЛС в режиме сопровождения антенна 5 устанавливается в направлении на цель и определяется размер и положение зоны просмотра по дальности. Это производится по данным целеуказания, полученным, например, от системы навигации или в результате работы той же РЛС в режиме обзора.
Колебания СВЧ, генерируемые возбудителем 1 на частоте fc, проходят в усилитель 2 мощности, в котором они усиливаются, и под воздействием импульсного модулятора 6, управляемого синхроимпульсами от синхронизатора 7, следующими с частотой повторения Fп, формируются зондирующие импульсы. Они проходят переключатель 3, суммарно-разностный преобразователь 4 и излучаются антенной 5 в пространство.
Отраженные сигналы из антенны 5 проходят по суммарному каналу через суммарно-разностный преобразователь 4 и переключатель 3 на смеситель 11 суммарного канала. Одновременно сигналы из антенны 5 проходят по разностному каналу (в схеме РЛС на фиг. 1 показан один разностный приемный канал, при необходимости второй разностный приемный канал реализуется аналогичным образом) через суммарно-разностный преобразователь 4 на смеситель 12 разностного канала. В смесителях 11 и 12 происходит супергетеродинное преобразование принимаемых сигналов на промежуточную частоту, причем в качестве гетеродинных колебаний используются колебания СВЧ частоты fГ, формируемые в возбудителе 1 и поступающие с выхода 2 возбудителя 1 на гетеродинные входы смесителей 11 и 12.
Возбудитель 1 (фиг.2) работает следующим образом.
Задающий генератор 39 генерирует непрерывные колебания стабильной частоты, из которых путем умножения в умножителе 40 и усиления в усилителе 43 образуются колебания с несущей частотой зондирующих сигналов fc, которые поступают на первых выход возбудителя. Генератор 42 опорной частоты генерирует стабильные колебания промежуточной частоты fПЧ, которые поступают на вход смесителя 41, на другой вход которого приходят колебания частоты сигнала. После смещения на выходе смесителя образуются колебания гетеродинной частоты fГ (например, fГ = Fc + FПЧ), которые после усиления в усилителе 44 поступают на второй выход возбудителя 1. Наконец, колебания промежуточной частоты после усиления в усилителе 45 поступают на третий выход возбудителя 1.
После супергетеродинного преобразования сигналов в смесителях 11 и 12 сигналы в суммарном и разностном каналах усиливаются по промежуточной частоте в усилителях 13 и 14 промежуточной частоты соответственно, а затем поступают на первые (сигнальные) входы соответствующих фазовых детекторов 15 и 16 - в суммарном канале, 17 и 18 - в разностном.
На вторые входы - входы опорной частоты фазовых детекторов - поступают опорные колебания с выхода блока 8 смещения частоты, причем на первые фазовые детекторы 15 и 17 в суммарном и разностном каналах - непосредственно, а на вторые фазовые детекторы - через фазовращатель 19 на 90o, так что как в суммарном, так и а разностном каналах образуются две квадратуры, что, как известно, позволяет устранить влияние неизвестной начальной фазы принимаемых сигналов.
Блок 8 смещения частоты работает следующим образом (фиг. 3).
На первый вход блока 8 смещения частоты поступают колебания промежуточной частоты с третьего выхода возбудителя 1, на второй и третий входы блока 8 поступают коды доплеровской частоты FДЦ цели и доплеровской частоты FДО, соответствующей составляющей скорости носителя РЛС в направлении на цель (например, от навигационной системы носителя РЛС). Эти коды поступают на первые входы преобразователей 46 и 47 код-частота, в которых они преобразуются в колебания соответствующих частот.
Преобразователи 46 и 47 код-частота работают следующим образом (фиг. 4).
На вторые входы преобразователей 46 (47) код-частота поступают тактовые импульсы стабильной частоты с первого выхода синхронизатора 7 через четвертый вход блока 8 смещения частоты.
Эти импульсы приходят на информационный вход управляющего делителя 51 частоты, выполненного на основе счетчика, на управляющий вход которого через первый вход преобразователя 46(47) и дешифратор 50 приходят управляющие сигналы, определяющие коэффициент деления частоты. Прямоугольные импульсы в форме меандра с требуемой частотой поступают с выхода усилителя 51 частоты на фильтр 52 нижних частот, выделяющий первую гармонику, синусоидальные колебания требуемой частоты поступают на выход преобразователя 46(47) код-частота, причем минимальное по абсолютной величине значение частоты соответствует единице младшего разряда кода.
Колебания частот FДЦ и FДО в блоке 8 поступают на входы двойного балансного модулятора 48, на выходе которого образуются колебания суммарной частоты FДЦ + FДО, поступающие на второй вход двойного балансного модулятора 49, на первый вход которого через вход 1 блока 8 поступают колебания промежуточной частоты fПЧ на выходе двойного балансного модулятора 49 образуются колебания суммарной частоты fПЧ + FДЦ + FДО, которые проходят на выход блока 8 смещения частоты в качестве колебаний опорной частоты.
Двойной балансный модулятор 48(49) работает следующим образом (фиг. 5).
Пусть на первый вход двойного балансного модулятора поступают колебания a1cos(2πf1t-ϕ1) , а на второй вход - колебания a2cos(2πf2t-ϕ2) , тогда на первый вход перемножителя 54 после задержки на 90o по фазе в фазовращателе 53 приходят колебания a1sin(2πf1t-ϕ1) , а на второй вход - колебания a2cos(2πf2t-ϕ2), после перемножения на первый вход сумматора 57 приходит произведение
ка1a2sin(2πf1t-ϕ1)cos(2πf2t-ϕ2),
где
к - коэффициент пропорциональности.
На первый вход перемножителя 56 поступают колебания a1cos(2πf1t-ϕ1) , а на второй вход перемножителя 56 после задержки на 90o по фазе в фазовращателе 55 приходят колебания a2sin(2πf2t-ϕ2) .
После перемножения на второй вход сумматора 57 приходит произведение
ка1a2cos(2πf1t-ϕ1)sin(2πf2t-ϕ2)
В результате суммирования на выходе сумматора 57 образуются колебания
ка1a2sin[2π(f1+f2)t-ϕ1-ϕ2)],
то есть суммарной частоты f1+f2.
После фазового детектирования видеосигналы квадратур суммарного и разностного каналов поступают на входы видеофильтров 9, 10 и 20, 21 соответственно, которые в случае простых импульсных зондирующих сигналов - прямоугольных радиоимпульсов с длительность τи - представляют собой пары одинаковых видеоусилителей с частотой среза, равной  . Видеоимпульсы с видеофильтров 9 и 10 квадратур в суммарном канале поступают на блок 22 ключей, представляющий собой пару одинаковых каскадов, которые открываются лишь на время действия на их управляющие входы прямоугольных видеоимпульсов - стробов с длительностью
. Видеоимпульсы с видеофильтров 9 и 10 квадратур в суммарном канале поступают на блок 22 ключей, представляющий собой пару одинаковых каскадов, которые открываются лишь на время действия на их управляющие входы прямоугольных видеоимпульсов - стробов с длительностью  (где C - скорость света), соответствующей разрешению по дальности ΔR . Эти импульсы приходят с выхода преобразователя 25 код-временной интервал, на вход которого поступает код дальности с блока 24 анализа и решений, определяющий их задержку относительно синхроимпульсов, поступающих с второго выхода синхронизатора 7 на 3-й вход преобразователя 25 код-временной интервал.
(где C - скорость света), соответствующей разрешению по дальности ΔR . Эти импульсы приходят с выхода преобразователя 25 код-временной интервал, на вход которого поступает код дальности с блока 24 анализа и решений, определяющий их задержку относительно синхроимпульсов, поступающих с второго выхода синхронизатора 7 на 3-й вход преобразователя 25 код-временной интервал.
Пройдя блок 22 ключей, видеоимпульсы сигналов от целей поступают на блок 23 доплеровских фильтров, который может быть выполнен в виде совокупности m/2 двухканальных цифровых фильтров (фиг. 6), работает следующим образом.
Биполярные видеоимпульсы сигналов квадратурных каналов через первый и второй входы проходят на аналого-цифровые преобразователи 58 и 59, где превращаются в многоразрядные числа, представляющие собой квантованные сигналы, которые поступают на m/2 параллельно включенных двухканальных фильтров 60r. На третий вход блока 23 доплеровских фильтров поступают синхроимпульсы с частотой повторения FП от синхронизатора 7. Двухканальный доплеровский фильтр 60r работает следующим образом (фиг. 8).
Квантованные сигналы в квадратурных каналах X
где 
После объединения квадратурных составляющих на выходах блоков 75 и 76 образуются соответственно сигналы
которые проходят на выходы +rΔF,-rΔF блока 60r соответственно.
Приведенные преобразования представляют собой, по существу, алгоритмы многоканальной оптимальной фильтрации процесса  с дискретным временем.
с дискретным временем.
Сигналы с выходов двухканальных доплеровских фильтров 60r попадают на выход блока 23 доплеровских фильтров, где упорядочиваются в порядке возрастания частоты настройки, а затем - на вход блока 24 анализа и решений. Работа блока 24 анализа и решений состоит в выполнении программы, которая была описана выше, и схема которой представлена на фиг. 11.
Блок 24 анализа и решений производит анализ сигналов от элементов дальности, начиная с дальности R0 начала зоны, которой соответствует номер i0. Если на этой дальности ни в одном из m частотных каналов нет сигналов, превысивших порог обнаружения, или если они есть, но ширина спектра их превосходит заранее установленное значение, выдается решение с первого выхода блока 24 анализа и решений о переходе к анализу следующего элемента дальности - с номером i0 + 1, соответствующий код поступает на преобразователь 25 код-временной интервал, на входы которого поступают синхроимпульсы с частотой повторения FП - с выхода 2 синхронизатора 7 - и импульсы с тактовой частотой fт= 1/τи , осуществляющие счет дальности от момента синхроимпульса. В результате на выходе преобразователя 25 код-временной интервал появляется строб-импульс, задержанный относительно прежнего положения на величину τи , соответствующую элементу разрешения, этот строб-импульс попадает на управляющий вход блока 22 ключей и начинается анализ следующего элемента дальности, и так до тех пор, пока в некотором элементе дальности с номером i* не будет обнаружен сигнал с шириной спектра, меньшей порогового значения кΔF . В этом случае блок 24 анализа и решений измеряет частоту F*, соответствующую максимуму доплеровского спектра сигнала от цели, и передает код этой частоты через второй выход и первый двухвходовый сумматор 26 на второй вход блока 8 смещения частоты, благодаря чему изменяется на величину F* частота опорных колебаний, поступающих с выхода блока 8 смещения частоты на фазовые детекторы 15 - 18, так что результирующая частота Доплера сигналов от цели становится близкой к нулевой. Одновременно по сигналам, следующим с блока 24 анализа и решений, открывается дальномер 35 (по входу 3), и на его вход 2 поступает значение начальной дальности цели R*.
После этого через доплеровские фильтры 29 и 30 нижних частот в суммарном и разностном каналах соответственно начинают проходить сигналы от цели.
Доплеровский фильтр 29 (30) работает следующим образом (фиг. 9).
Видеоимпульсы сигналов квадратурных каналов с выходов согласованных фильтров 20 и 21 - в суммарном и разностном приемных каналах соответственно - попадают через входы 1 и 2 на аналого-цифровые преобразователи 77 и 78 соответственно, осуществляющие квантование сигналов на несколько уровней. Квантованные сигналы с выходов аналого-цифровых преобразователей 77 и 78 X
которые соответственно поступают на выходы 1 и 2 доплеровского фильтра 29 (30).
Сигналы Y ,
,
не зависящий от неизвестной начальной фазы принимаемых сигналов. Блок 33 объединения квадратурных каналов, как и аналогичные блоки 75 и 76, может быть выполнен в виде двухадресного постоянного запоминающего устройства, содержащего значения функции  от двух аргументов.
от двух аргументов.
После попадания сигнала от цели Y0 на вход 1 дальномера 35 начинается автоматическое сопровождение цели по дальности.
Дальномер 35 работает следующим образом (фиг. 10).
Сигнал от цели через первый вход дальномера 35 попадает на первый вход временного дискриминатора 83, на его второй вход поступает импульс от преобразователя 86 код-временной интервал (работа преобразователя 86 происходит также, как и описанного выше преобразователя 25 код-временной интервал), на вход которого приходит код начальной дальности до цели через второй вход дальномера 35. На входе временного дискриминатора образуется двухполярный кодовый сигнал рассогласования по времени, проходя через ключ 84, открытый командой, пришедшей с третьего входа дальномера 35, этот сигнал попадает на счетный вход реверсивного счетчика 85, где складывается (с учетом знака) с кодом начальной дальности, новое значение кода дальности поступает на первый вход преобразователя 86 код-временной интервал и т.п.
Строб-импульс, положение которого относительно синхроимпульса соответствует дальности до цели, поступает через выход дальномера 35 на управляющие входы второго блока 27 ключей и ключа 36. Блок 27 ключей открывается на время прохождения импульсов сигнала от цели, пропуская их на частотный дискриминатор 28, образующий сигнал рассогласования по частоте Доплера.
Частотный дискриминатор 28 работает следующим образом (фиг. 7).
Видеоимпульсы квадратурных составляющих сигнала от сопровождаемой цели через блок 27 ключей попадают с видеофильтров 9 и 10 суммарного канала на входы 1 и 2 частотного дискриминатора 28, далее они квантуются на несколько уровней в аналого-цифровых преобразователях 61 и 62 соответственно, квантованные сигналы поступают в двухканальный доплеровский фильтр 63, каналы которого настроены на частоты ΔF и -ΔF , расположенные симметрично относительно нулевой частоты. Устройство и работа двухканального доплеровского фильтра 63 полностью совпадает с устройством и работой двухканального доплеровского фильтра 60r (фиг. 8) при r = 1. Сигналы с выходов ΔF и -ΔF фильтра 63 попадают на входы блока 64 вычитания, где образуется двухполярный кодированный сигнал рассогласования доплеровской частоты принимаемого сигнала относительно нулевой частоты, этот сигнал рассогласования с выхода частотного дискриминатора 28 попадает на второй вход первого двухвходового сумматора 26, где складывается с кодом частоты F*, пришедшим ранее с блока 24 анализа и решений, результирующий код доплеровской частоты попадает на второй вход блока 8 смещения частоты и меняет частоту опорных колебаний, благодаря чему производится сопровождение сигналов от цели по доплеровской частоте, значение которой после фазового детектирования удерживается вблизи нулевого значения.
Одновременно с блоком 27 ключей строб от дальномера 35 открывает и ключ 36, на выход которого проходит сигнал рассогласования по углу, образующийся после перемножения одноименных квадратурных составляющих сигналов от цели, прошедших по суммарному и разностному приемным каналам через соответствующие доплеровские фильтры 29 и 30, и суммирования этих произведений в двухвходовом сумматоре 34 по правилу скалярного произведения
где
C - коэффициент пропорциональности.
Как известно, это правило с точностью до нормирующего множителя совпадает с оптимальным правилом оценки углового рассогласования при моноимпульсной пеленгации (например, [2, с. 20 (1)]).
Полученные таким образом сигналы углового рассогласования, проходя через ключ 36, накапливаются в интеграторе 37, результирующий сигнал с выхода интегратора 37 управляет антенной 1 с помощью привода 38 антенны.
Синхронизатор 7, осуществляющий общее управление РСЛ, вырабатывает тактирующие импульсы с частотой  , поступающие с первого выхода синхронизатора 7 на четвертый вход блока 8 смещения частоты и на счетные входы преобразователей 25 и 86 код-временной интервал (последний в составе дальномера 35), а также синхроимпульсы с частотой повторения FПс второго выхода - для запуска импульсного модулятора 6 и для управления работой преобразователей 25 и 86 код-временной интервал. Синхронизатор 7 может быть построен на основе задающего генератора импульсов с частотой fТ и счетчика-делителя с формирователем - для формирования синхроимпульсов с частотой FП << fТ.
, поступающие с первого выхода синхронизатора 7 на четвертый вход блока 8 смещения частоты и на счетные входы преобразователей 25 и 86 код-временной интервал (последний в составе дальномера 35), а также синхроимпульсы с частотой повторения FПс второго выхода - для запуска импульсного модулятора 6 и для управления работой преобразователей 25 и 86 код-временной интервал. Синхронизатор 7 может быть построен на основе задающего генератора импульсов с частотой fТ и счетчика-делителя с формирователем - для формирования синхроимпульсов с частотой FП << fТ.
Таким образом, предлагаемая РЛС осуществляет сопровождение цели по угловой координате, по дальности и по доплеровской частоте при более высокой по сравнению с прототипом помехозащищенности по отношению к пассивным помехам, как организованным - типа дипольных облаков, так и естественным - отражениям от береговой линии, а для РЛС, использующих ФМ сигналы, имеет место также и повышение точности сопровождения и помехозащищенности по отношению к активным шумовым помехам.
Эффект повышения помехозащищенности по отношению к пассивным помехам можно оценить следующим образом.
В условиях рассмотренного выше примера (фиг. 12) имеем для отношения сигнал/помеха в прототипе, как следует из вышеизложенного, даже при отсутствии частотного разрешения
что при
σц= 5•103м2, ϑ ≤ 0,1, σ°= 0,03, ΔR = 300 м, R = 10 км, φ0,5= 0,15, X = 300 м составляет ρ1 ≅ 0,4(-4 дБ).
Это значение отношения сигнал/помеха недостаточно для уверенного обнаружения сигнала от цели (НК) на фоне помехи, тем более для захвата и сопровождения.
В предлагаемом устройстве в тех же условиях при времени когерентной обработки
и при ширине спектра отражений от участка берега внутри импульсного объема, определяемого реальной ДНА и разрешением по дальности R (выше)
получим, что отношение сигнал/помеха возрастает в  , так как сигналы от НК целиком попадают в полосу ΔF = 10 Гц (при интервале корреляции флюктуаций сигналов от НК, не превосходящем 0,1 с в диапазоне длин волн λ ≅ 3,0 см , а отражения от берега отфильтровываются, как показано выше.
, так как сигналы от НК целиком попадают в полосу ΔF = 10 Гц (при интервале корреляции флюктуаций сигналов от НК, не превосходящем 0,1 с в диапазоне длин волн λ ≅ 3,0 см , а отражения от берега отфильтровываются, как показано выше.
Таким образом, отношение сигнал/помеха в предлагаемом устройстве возрастает, например, на 17 дБ по сравнению с прототипом и составляет
то есть 20 раз (13 дБ), что достаточно для уверенного захвата и сопровождения по дальности и угловым координатам (при моноимпульсной пеленгации).
Тем более это имеет место при наличии частотного разрешения, то есть когда сигналы от НК и от БЧ разделяются по частотным каналам, при выполнении условия
По мере сближения носителя РЛС с целью вероятности захвата и сопровождения возрастают как ввиду повышения отношений сигнал/шум и сигнал/помеха ((8), (9)), так и благодаря улучшению условия разрешения (величина R в (10) уменьшается). Наконец, в ситуациях, когда направление БЧ перпендикулярно направлению РЛС-НК, при условии нахождения НК от БЧ на расстояниях, превосходящих ΔR - разрешение по дальности, имеет место разделение сигналов от НК и от БЧ по разным каналам дальности (благодаря разрешению по дальности), и предлагаемая РЛС работает в облегченных условиях, а когда расстояние НК от БЧ меньше ΔR , осуществляется частотная селекция, как описано выше, с достаточно высокой эффективностью.
Таким образом, предлагаемая РЛС является более эффективной при любых взаимных расположениях РЛС-НК-БЧ.
Эффект повышения помехозащищенности по отношению к активным шумовым помехам и точности углового сопровождения в РЛС, использующих сложные, в частности, фазоманипулированные сигналы, определяется сравнением выражения для дисперсии измерения угла при моноимпульсной пеленгации, которое для устройства-прототипа имеет вид (при ρ0≪ 1) (выше (6))
и выражения для дисперсии для предлагаемого устройства, которое имеет вид
Сравнение формул (6) и (11) показывает, что в предлагаемой РЛС дисперсия в 1/ρ0 меньше (обычно ρ0 ≪ 1 - отношение сигнал/шум до сжатия, так как N > > 1), а точность соответственно выше, чем в устройстве-прототипе.
При воздействии шумовой помехи отношение сигнал/помеха уменьшается, при этом σ
Таким образом, технический эффект в предлагаемой РЛС состоит в достижении более высокой помехозащищенности по отношению к активным помехам при одновременном достижении более высокой точности по сравнению с прототипом.
Пользуясь сведениями, представленными в материалах заявки, можно изготовить в производстве и применять предлагаемую РЛС для сопровождения целей по дальности и угловым координатам, что доказывает промышленную применимость объекта изобретения.
В соответствии с материалами заявки был изготовлен опытный образец устройства, испытания которого подтвердили достижение указанного в материалах заявки технического результата.
Источники информации:
1. Леонов А. И. , Фомичев К.И. Моноимпульсная радиолокация. - М.: Сов. Радио, 1970.
2. Справочник по радиолокации. /Под ред. М. Сколника. - М.: Сов. Радио, 1978, т. 4, с. 20, рис. 15 (прототип).
3. Справочник по радиолокации. /Под ред. М. Сколника. - М.: Сов. Радио, 1976, т. 1.
4. Фалькович С.Е. Прием радиолокационных сигналов на фоне флюктуационных помех. - М.: Сов. Радио, 1961.
5. Красюк Н.П., Розенберг В.И. Корабельная радиолокация и метеорология. - Л.: Судостроение, 1970.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ МОНОИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 1997 |
|
RU2117960C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2178896C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1996 |
|
RU2099739C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2260195C1 |
| ОДНОКАНАЛЬНАЯ МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ЦЕЛЬ | 2000 |
|
RU2176399C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1994 |
|
RU2083995C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2006 |
|
RU2309430C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1998 |
|
RU2124221C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2020 |
|
RU2759511C1 |
| ОДНОКАНАЛЬНАЯ МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ЦЕЛЬ | 1997 |
|
RU2108595C1 |



Изобретение относится к радиолокации и может использоваться в когерентно-импульсных РЛС для сопровождения цели. Технический результат заключается в повышении помехозащищенности сопровождения по отношению к пассивным и активным шумовым помехам при одновременном повышении точности сопровождения. Радиолокационная станция содержит последовательно соединенные синхронизатор, передатчик, переключатель прием-передача, суммарно-разностный преобразователь и антенну, смеситель, усилитель промежуточной частоты, фазовые детекторы с видеофильтрами в суммарном канале, смеситель, усилитель промежуточной частоты, фазовые детекторы с видеофильтрами а разностном канале, фазовращатель, блок смещения частоты, два блока ключей, блок доплеровских фильтров, блок анализа и решений, два сумматора, два перемножителя, частотный детектор, блок объединения квадратур, дальномер, доплеровские фильтры нижних частот суммарного и разностного каналов, преобразователь код-временной интервал и интегратор. 12 ил.
Моноимпульсная радиолокационная станция сопровождения цели, содержащая последовательно соединенные синхронизатор, передатчик, переключатель прием - передача, суммарно-разностный преобразователь и антенну, последовательно соединенные смеситель и усилитель промежуточной частоты в суммарном канале, последовательно соединенные смеситель, усилитель промежуточной частоты и фазовый детектор с видеофильтров в разностном канале, а также видеофильтр в суммарном канале, дальномер и последовательно соединенные интегратор ошибок углового рассогласования и привод антенны, кинематически связанный с антенной, причем сигнальный вход смесителя суммарного канала соединен с третьим плечом переключателя прием - передача, сигнальный вход смесителя разностного канала соединен со вторым выходом суммарно-разностного преобразователя, гетеродинные входы смесителей суммарного и разностного каналов объединены и подключены к выходу генератора гетеродинной частоты передатчика, а выход синхроимпульсов синхронизатора соединен также с соответствующим входом дальномера, отличающаяся тем, что в нее введены блок смещения частоты, последовательно соединенные блок анализа решений и первый сумматор, два фазовых детектора и видеофильтр в суммарном канале, дополнительный фазовый детектор с видеофильтром в разностном канале, фазовращатель на 90o, первый и второй двухканальные блоки ключей, выходы которых подключены к соответствующим входа блока допплеровских фильтров и частотного дискриминатора соответственно, допплеровские фильтры нижних частот суммарного и разностного каналов, выходы первого из которых подключены к соответствующим входам блока объединения квадратур, а выходы второго подключены ко входам второго сумматора через соответствующие перемножители, вторые входы которых подключены соответственно к первому и второму выходам допплеровского фильтра нижних частот суммарного канала, а также преобразователь код - временной интервал и ключ, причем передатчик содержит последовательно соединенные возбудитель, включающий генераторы сигнальной, гетеродинной и опорной частот, и усилитель мощности, выход которого является выходом передатчика, а также импульсный модулятор, вход которого является входом передатчика, а выход соединен с управляющим входом усилителя мощности, выход опорной частоты возбудителя через блок смещения частоты соединен с объединенными входами опорной частоты первых фазовых детекторов в суммарном и разностном каналах непосредственно, а с объединенными входами опорной частоты вторых фазовых детекторов в суммарном и разностном каналах - через фазовращатель на 90o, объединенные входы первого и второго фазовых детекторов суммарного канала соединены с выходом усилителя промежуточной частоты суммарного канала, а их выходы соединены через соответствующие видеофильтры с одноименными входами первого и второго двухканальных блоков ключей и допплеровского фильтра нижних частот суммарного канала, объединенные вход первого и второго фазовых детекторов разностного канала соединены с выходом усилителя промежуточной частоты разностного канала, а их выходы соединены через соответствующие видеофильтры с соответствующими входами допплеровского фильтра нижних частот разностного канала, многоканальный выход блока допплеровских фильтров соединен поканально с многоканальным входом блока анализа и решений, второй вход первого сумматора подключен к выходу частотного дискриминатора, а выход первого сумматора - ко второму информационному входу блока смещения частоты, выход блока объединения квадратур соединен с сигнальным входом дальномера, вход начальной дальности и командный вход которого подключены к одноименным выходам блока анализа и решений, выход кода дальности которого соединен через преобразователь код-временной интервал с управляющим входом первого двухканального блока ключей, выход дальномера соединен с управляющими входами второго двухканального блока ключей и ключа, сигнальный вход которого соединен с выходом второго сумматора, а выход - со входом интегратора ошибки углового рассогласования, выход синхроимпульсов синхронизатора подключен к соответствующим входам преобразователя код - временной интервал, дальномера, блока допплеровских фильтров, частотного дискриминатора, а также допплеровских фильтров нижних частот суммарного и разностного каналов, а выход тактовых импульсов синхронизатора подключен к тактовым входам блока смещения частоты, преобразователя код - временной интервал и дальномера.
| Справочник по радиолокации / Под ред | |||
| М | |||
| Сколника | |||
| - М.: Сов | |||
| радио, 1978 , т | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Прибор для промывания газов | 1922 |
|
SU20A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
| SU, 1259823 A1, 07.04.91 | |||
| US, 4568940 A, 04.02.86 | |||
| US, 4533916, A, 06.08.85 | |||
| DE, 3030983 C1, 20.12.90 | |||
| EP, 0082427 A2, 29.06 .83 | |||
| EP, 0381038 A1, 08.08.90. | |||
