Изобретение относится к измерительной технике и может быть использовано в приборах контроля состава и свойств различных веществ и материалов, например, для контроля состава полезных ископаемых и продуктов их переработки, контроля состава жидкостей и газов, контроля состава и свойств композиционных материалов и т.д.
Известно устройство контроля качества изделий, содержащее преобразователь и соединенный с ним усилитель, последовательно соединенные генератор, первый счетчик и первый блок регистров, последовательно соединенные компаратор, формирователь нормированных импульсов и второй счетчик, и блок схем И, выход формирователя нормированных импульсов соединен со стробирующим входом первого блока регистров, которое для повышения достоверности контроля снабжено формирователем огибающей, последовательно соединенными через шину данных аналого-цифровым преобразователем, вторым блоком регистров и первым блоком сравнения, и формирователем вычитающих импульсов, вход формирователя огибающей соединен с выходом усилителя, а выход - с входами компаратора и аналого-цифрового преобразователя, стробирующий вход второго блока регистров соединен с выходом формирователя нормированных импульсов, выходы первого блока сравнения подключены соответственно к первой группе входов блока схем И, вторая группа входов которого соединена соответственно с выходами первого блока регистров, выходы подключены соответственно к входам блока вычитания, а выход формирователя вычитающих импульсов соединен со вторым входом второго счетчика [1].
Недостатком известного устройства является невозможность разбраковки изделий по различным параметрам.
Известно контрольно-измерительное устройство, содержащее два измерительных преобразователя, связанные с ними входами блоки обработки сигналов, блок выделения предельных значений и блок индикации и регистрации, которое для повышения достоверности разбраковки изделий по физико-механическим параметрам имеет выполнение преобразователей одного электромагнитным, второго термоэлектрическим, а блок выделения предельных значений сигналов выполнен в виде двух групп многопороговых амплитудных дискриминаторов, включенных на их выходах узлов сравнения и подключенных к выходам последних блоков индикации и регистрации [2].
Недостатками контрольно-измерительного устройства являются низкая точность измерений за счет неучета неодинакового рассеивания сигналов при разных значениях контролируемого параметра.
Техническим результатом изобретения является повышение точности измерений за счет учета неодинакового рассеивания сигналов при разных значениях контролируемого параметра. Он достигается тем, что устройство для измерения, содержащее два измерительных преобразователя, связанные с ними входами интенсиметры, блок определения двух наименьших значений и блок индикации и регистрации, снабжено последовательно соединенными блоком памяти, блоком определения уравнений эллипсов разброса и координат их центров, блоком вычисления координат точек пересечения эллипсов разброса с прямыми, проходящими через соответствующие центры эллипсов разброса и точку текущего измерения, блоком определения отношений расстояний и блоком вычисления окончательного результата, выход которого подключен ко входу блока индикации и регистрации, блоком определения расстояний от точки текущего измерения до центров ближайших эллипсов разброса и до точек пересечения, входы которого подключены к выходам интенсиметров и блока определения уравнений эллипсов разброса и координат их центров, а выход - ко входу блока определения двух наименьших значений, программным запоминающим устройством, подключенным ко второму входу блока вычисления окончательного результата, и генератором тактовых импульсов, подключенным к управляющим входам всех блоков, а выход блока определения двух наименьших значений подключен ко вторым входам блока определения отношения расстояний и блока вычисления координат точек пересечения эллипсов разброса с прямыми, проходящими через соответствующие центры эллипсов разброса и точку текущего измерения, третьим входом связанным с выходом блока памяти.
Изобретательский акт при создании контрольно-измерительного устройства состоит в том, что автором впервые обнаружено явление неодинакового рассеивания сигналов при постоянных и близких значениях контролируемого параметра. Автором впервые на этой основе обоснован и выведен аналитически критерий информативности пары сигналов, которые при близких значениях контролируемого параметра имеют неодинаковые размеры и неодинаковую ориентацию эллипсов рассеивания сигналов. Критерий информативности пары коррелированных друг с другом сигналом опубликован автором в журнале "Измерительная техника", 1991 год, N 1. На второй основе автором впервые разработано устройство, которое для повышения достоверности распознавания близких значений контролируемого параметра впервые учитывает неодинаковые рассеивания пары сигналов при близких значениях контролируемого параметра.
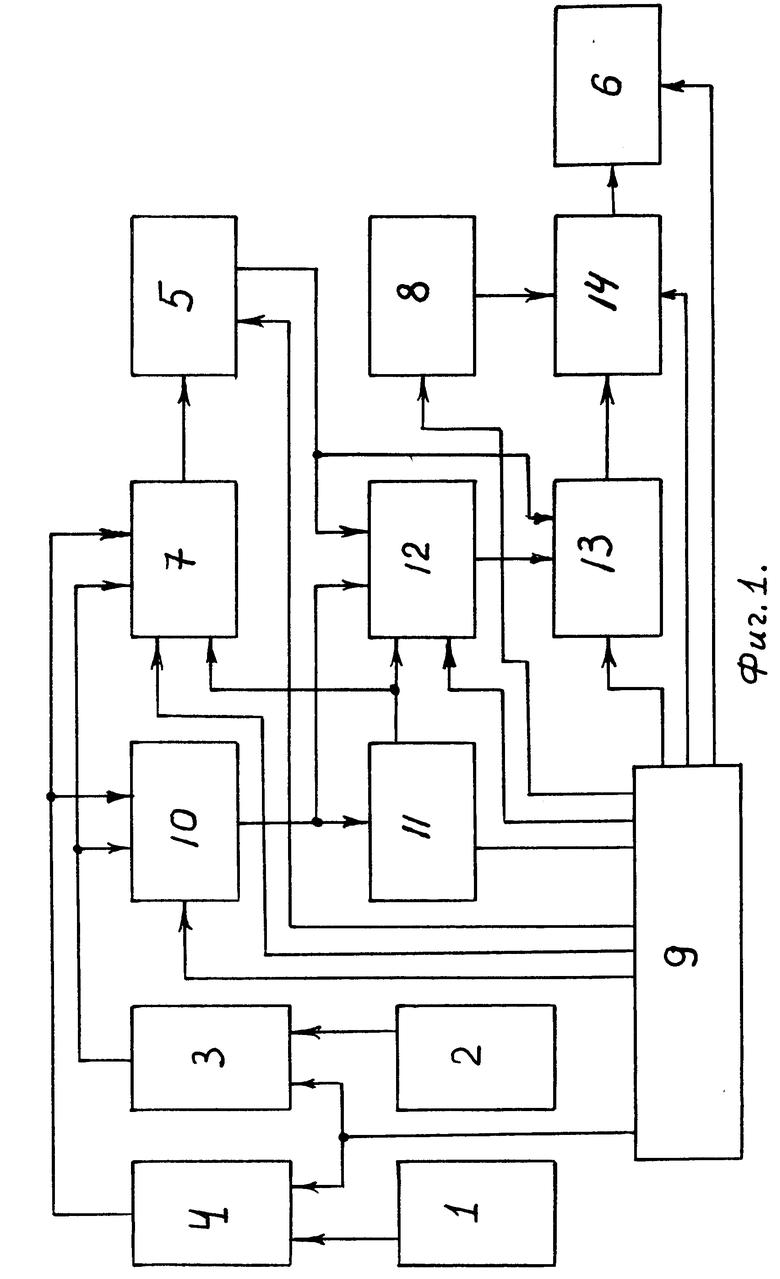
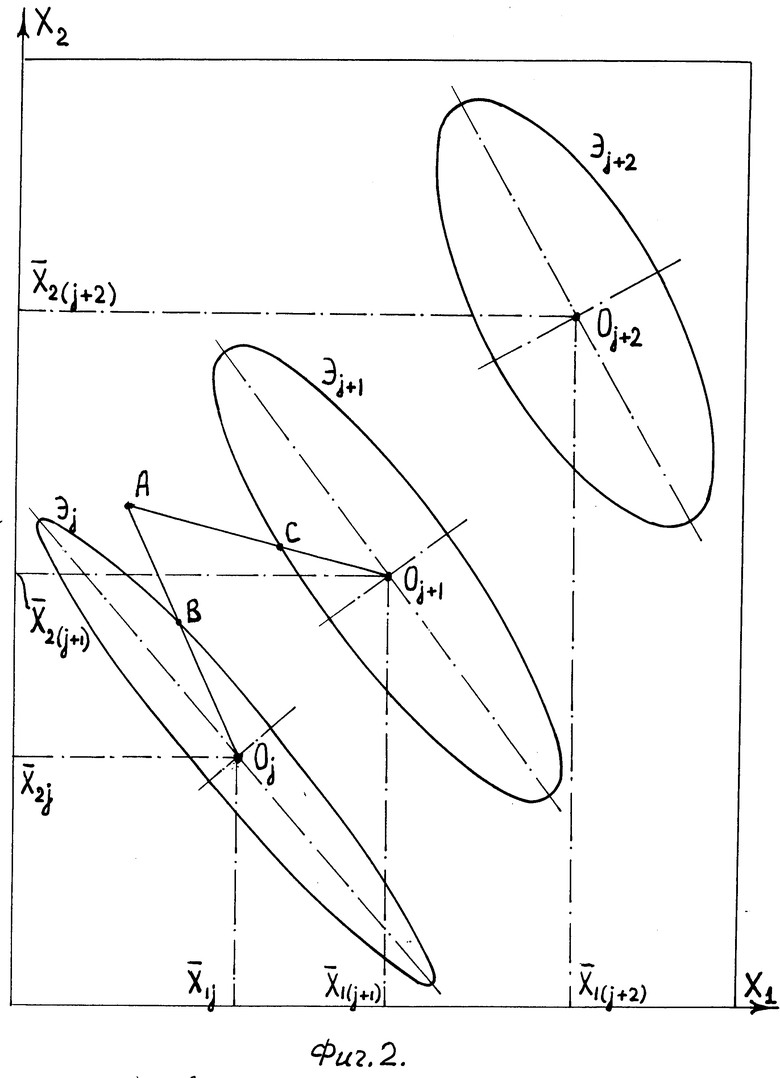
На фиг. 1 приведена функциональная схема контрольно-измерительного устройства; на фиг. 2 дана геометрическая интерпретация работы и повышения точности измерений.
Измерительное устройство содержит два измерительных преобразователя 1 и 2, связанные с ними входами интенсиметры 3 и 4, блок выделения предельных значений 5 и блок 6 индикации и регистрации. Измерительное устройство снабжено блоком 7 определения расстояний от точки текущего измерения до центров ближайших эллипсов разброса и до точек пересечения, программным запоминающим устройством 8, генератором 9 тактовых импульсов, блоком 10 памяти, блоком 11 определения уравнений эллипсов разброса и координат их центров, блоком 12 вычисления координат точек пересечения эллипсов разброса с прямыми, проходящими через соответствующие центры эллипсов разброса и точку текущего измерения, блоком 13 определения отношений и блоком 14 вычисления окончательного результата. Управляющие входы всех блоков соединены с выходами генератора 9 тактовых импульсов.
Работа устройства осуществляется в два этапа.
На первом этапе производится калибровка (градуировка) устройства на конкретном объекте контроля, а на втором этапе производится собственно измерение значения контролируемого параметра объекта контроля.
Процесс градуировки (калибровки) устройства осуществляется следующей последовательностью операций устройства.
Из контролируемого объекта приготовляют по q порций (проб) материала для каждого из m значений контролируемого параметра. Значения контролируемого параметра в каждой группе из q порций должны оставаться постоянными, а значения неконтролируемых влияющих параметров в каждой порции группы могут произвольно случайно изменяться. Значения контролируемого параметра в группах порций должны по возможности равномерно заполнять весь диапазон измерений контролируемого параметра от минимально возможного значения до максимально возможного. Количество порций в каждой группе материала с постоянным значением контролируемого параметра должно быть не менее 10, чтобы можно было с достаточной для практических целей точностью затем определить коэффициенты эллипсов рассеивания сигналов для каждого из m значений контролируемого параметра, выбранных для градуирования. Эта процедура пробоподготовки общеизвестна и широко применяется в приборах косвенных измерений контролируемого параметра по измеренным сигналам. На второй стадии первого этапа калибровки устройства происходит процесс определения средних значений сигналов для каждой из m групп проб при постоянном значении контролируемого параметра. Эта часть калибровки также широко известна. Вторая часть калибровки устройства является принципиально новой и никогда раннее не применялась в измерительных устройствах - это процесс определения коэффициентов уравнений эллипсов рассеивания сигналов для всех групп проб. Калибровка устройства происходит следующим образом. Перед измерительными преобразователями 1 и 2 помещают порцию материала первого значения контролируемого параметра Р1 и преобразователями 1 и 2 и интенсиметрами 3 и 4 измеряют сигналы Х111 и Х211, которые запоминают в блоке 10 памяти. Аналогично помещают вторую порцию того же первого значения Р1 и измеряют сигналы Х112 и Х212, которые также запоминают. Помещая перед преобразователями последовательно все q порций первого значения параметра Р1 и измеряя сигналы, в блоке памяти запоминают 2q значений сигналов.
После этого блок 11 вычисляет два средние значения сигналов = q
= q x11K ,
x11K ,  = q
= q x21k.
x21k.
(1)
Теперь повторяют всю описанную процедуру с q порциями материала второго значения контролируемого параметра и в результате измеряют и в блоке 10 памяти запоминают 2о сигналов. Определяют два средних значения сигналов  и
и  по аналогичным к (1) формулам и вместе со средними значениями сигналов
по аналогичным к (1) формулам и вместе со средними значениями сигналов  и
и  запоминают их в блоке 11. Аналогично повторяют всю процедуру для всех значений контролируемого параметра. В результате в блоке 10 памяти запоминают 2qm значений сигналов, а в блоке 11 запоминают 2о средних значений сигналов. В программируемое запоминающее устройство 8 заносят m значений контролируемого параметра Р1, Р2,...,Рm, для которых отбирались по q порций материала для калибровки устройства.
запоминают их в блоке 11. Аналогично повторяют всю процедуру для всех значений контролируемого параметра. В результате в блоке 10 памяти запоминают 2qm значений сигналов, а в блоке 11 запоминают 2о средних значений сигналов. В программируемое запоминающее устройство 8 заносят m значений контролируемого параметра Р1, Р2,...,Рm, для которых отбирались по q порций материала для калибровки устройства.
Работа устройства на втором этапе собственно измерения значения контролируемого параметра происходит следующим образом. Когда перед измерительными преобразователями 1 и 2 появляется объект контроля с неизвестным значением контролируемого параметра, то с генератора 9 тактовых импульсов на управляющие входы интенсиметров 3 и 4 поступает управляющий сигнал, под действием которого интенсиметры за время измерения t измеряют сигналы Х1А и Х2А, соответствующие неизвестному пока значению контролируемого параметра РA. По истечении времени измерения t из генератора 9 тактовых импульсов на управляющий вход блока 7 поступает импульс, под действием которого определяют m расстояний от измеренной точки А(Х1А, Х2А) до центров всех m эллипсов рассеивания сигналов О1, О2,...,Оj,...,Om. Для j-го и (j + 1)-го расстояний формулы имеют вид
dj= 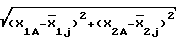 ,
,
dj+1=  .
.
(2) Все m вычисленных расстояний поступают на вход блока 5 определения двух наименьших значений расстояний от измеренной точки А до центров всех m эллипсов. При поступлении на управляющий вход блока 5 разрешающего импульса с генератора 9 тактовых импульсов блок 5 определяет два наименьших расстояния путем сравнения всех m расстояний и определяют номера двух наименьших расстояний. Пусть, например как указано на фиг. 2 это будут расстояния j и (j + 1). Значения двух наименьших расстояний и их номера из блока 5 поступают в блок 12, на первый вход которого с блоков 10 и 11 поступают соответственно значения сигналов и средние значения сигналов, накопленные в блоках 10 и 11 при градуировке.
После поступления на управляющий вход блока 12 управляющего импульса с генератора 9 тактовых импульсов в блоке 12 осуществляется вычисление координат точек В и С пересечения эллипсов Эj и Эj+1 с прямыми АОj и АОj+1. Вычисление координат точек В и С в блоке 12 осуществляется по алгоритму: сначала определяются коэффициенты уравнений эллипсов Эj и Эj+1, затем решаются совместно уравнение соответствующего эллипса и прямой и уже вычисляются координаты. Так, например, для уравнения эллипса Эj
ajx12 + 2bjx1x2 + cjx22 + 2hjx1 +
+ 2ejx2 + fj = 0 (3) коэффициенты вычисляются по формулам
aj = σx2j2,
cj = σx1j2,
bj = Kx1x2j,
hj =  Kx1x2 -
Kx1x2 -  σx2j2, (4)
σx2j2, (4)
ej = x1j Kx1x2j -  σx1j2,
σx1j2,
fj =  σx2j2 +
σx2j2 +  -
-
-2 Kx1x2j - σx1j2 σx2j2 + K2x1x2j Для уравнения эллипса Эj+1
Kx1x2j - σx1j2 σx2j2 + K2x1x2j Для уравнения эллипса Эj+1
aj+1x12 + 2bj+1x1x2 + cj+1x22 +
+ 2hj+1x1 + 2ej+1x2 + fj+1 = 0, (5) коэффициенты вычисляются по формулам
aj+1 = σx2(j+1)2,
cj+1 = σx1(j+1)2 ,
bj+1 = Kx1x2(j+1), hj+1= Kx1x2(j+1)-
Kx1x2(j+1)-  ,
,
ej+1 =  Kx1x2(j+1) -
Kx1x2(j+1) - σx1(j+1)2,
σx1(j+1)2,
fj+1 =  σx2(j+1)2 + (6)
σx2(j+1)2 + (6)
+ σx2(j+1)2 - 2x1(j+1)x2(j+1)Kx1x2(j+1) -
σx2(j+1)2 - 2x1(j+1)x2(j+1)Kx1x2(j+1) -
- σx1(j+1)2 σx2(j+1)2+ K2x1x2(j+1). Решая совместно уравнение (3) эллипса Эj и уравнение прямой АОj
(X2A- )X1+(
)X1+( -X1A)X2+(
-X1A)X2+( X1A-X
X1A-X )=0,
)=0,
(7) находят координаты точки В
X1B= (2Qj)-1(-Hj+  ),
),
X2B= -Mjhj-Kj(2LjQj)-1(-Hj+ ),
),
(8) где обозначено
Kj= (X2A- ), Lj= (
), Lj= ( -X1A), Mj= (
-X1A), Mj= ( X1A-
X1A- X2A),
X2A),
Qj = Ljaj2 - 2KjLjbj + Kj2Cj,
Hj = 2(KjMjCj - LjMjbj + Lj2hj - KjLjej,
Nj = Mj2Cj - 2LjMjej + Lj2 fj (9) Аналогично, решая совместно уравнение (5) эллипса Эj+1 и уравнение прямой АОj+1
(X2A- )X1+(X1(j+1)-X1A)X2+(X2(j+1)X1A-X2AX1(j+1)=0,
)X1+(X1(j+1)-X1A)X2+(X2(j+1)X1A-X2AX1(j+1)=0,
(10) находят координаты точки С
X1C= (2Qj+1)-1(-Hj+1+ 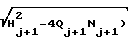 ,
,
X2C= -Mj+1L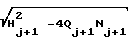 ),
),
(11) где обозначено
Kj+1= (X2A- ), Lj+1= (
), Lj+1= ( -X1A),
-X1A),
Mj+1= ( X1A-
X1A- X2A),
X2A),
Qj+1 = L2j+1aj+1 - 2Kj+1Lj+1bj+1 +
+ K2j+1Cj+1,
Hj+1 = 2(Kj+1Mj+1Cj+1 - Lj+1Mj+1bj+1 +
+ L2j+1hj+1 - Kj+1Lj+1ej+1),
Nj+1 = M2j+1Cj+1 - 2Lj+1Mj+1ej+1 +
+ L2j+1fj+1. По координатам точек В и С и центров эллипсов Оj и Оj+1 (то есть по средним значениям соответствующим центрам сигналов) определяют значения расстояний ВОj и COj+1 по формулам
BOj= dB= 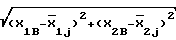 ,
,
(13)
COj+1= dC=  .
.
(14) Значения расстояний ВОj и СОj+1 с выхода блока 12 подаются в блок 13, куда также с блока 5 подаются значения расстояний АОj и АОj+1. При поступлении на управляющий вход блока 13 отношений импульса с генератора 9 тактовых импульсов в блоке 13 вычисляются два значения отношений
dj0 = djdB-1, (15)
d(j+1)0 = dj+1de-1. (16) Значения отношений с блока 13 поступают в блок 14, на второй вход которого из программного запоминающего устройства поступают значения контролируемого параметра Рj и Рj+1, которые были занесены в блок 8 при калибровке устройства. При поступлении на управляющий вход блока 14 управляющего импульса с генератора 9 тактовых импульсов блок 14 вычисляет приближенные и уточненное значение контролируемого параметра. Приближенные значения параметра определяются по формулам
PAI = Pj + (Pj+1 - Pj)dj0(dj0 + d(j+1)0)-1 , (17)
PAII = Pj+1 - (Pj+1 - Pj)d(j+1)0(dj0 +
+ d(j+1)0-1. (18) а уточненное значение контролируемого параметра определяется по формуле, которая учитывает то обстоятельство, что более близкий к точке А эллипс рассеивания сигналов при его переносе в точку А будет меньше деформироваться, чем более далекий от точки А эллипс. Поэтому при определении уточненного значения параметра ранее вычисленные приближенные значения складываются с весами обратно пропорциональными расстояниям от точки А до эллипсов Эj и Эj+1
PA = (PAId(j+1)0 + PAIIdj0)(dj0 + d(j+1)0)-1 =
= (Pjd(j+1)0 + Pj+1dj0))dj0 + d(j+1)0)-1. (19)
Вычисленное в блоке 14 значение результата РА подается на вход блока 6 индикации и регистрации, где после поступления в него разрешающего импульса с генератора 9 тактовых импульсов индицируется и регистрируется непосредственно в единицах контролируемого параметра.
При построении блоков устройства на современных микросхемах алгоритм работы устройства по формулам (2) - (19) реализуется за время в единицы милисекунд.
Затем перед измерительными преобразователями 1 и 2 появляется новая порция материала и процесс измерения снова происходит в описанной выше последовательности по алгоритмам формул (2) - (19) и новый результат индицируется и регистрируется блоком 6.
Процесс калибровки устройства происходит при установке устройства на объект контроля, после резкой смены контролируемой продукции или после ремонта устройства.
По выполняемым при измерениях функциям устройство не имеет мировых аналогов, так как никогда ранее при измерениях не учитывалось, что в общем случае эллипсы рассеивания сигналов из-за случайных измерений неконтролируемых влияющих параметров имеют неодинаковые размеры и неодинаково ориентированы в пространстве сигналов. В настоящем измерительном устройстве неодинаковые размеры и ориентации эллипсов рассеивания сигналов автоматически учитываются и тем, что приближенные результаты определяются по отношениям расстояний, и тем, что уточненный результат определяется с весами, обратно пропорциональными расстояниям до эллипсов. Такой алгоритм работы устройства позволяет более чем на шесть порядков снизить вероятность ошибки при отключении друг от друга близких значений контролируемого параметра, чего не обеспечивает ни один из известных методов повышения точности измерений.
Техническими преимуществами устройства по сравнению с прототипом являются: уменьшена в десятки раз случайная погрешность определения значения контролируемого параметра, расширены функциональные возможности за счет получения правильного результата при любых видах зависимостей каждого из сигналов от контролируемого параметра, упрощена градуировка за счет исключения определения коэффициентов уравнения градуировочной характеристики и за счет более простого приготовления порций продукта для градуировки. При контроле качества угля на ленте конвейера (его зольности) погрешность уменьшается от 1% абсолютного по золе для совершенных золомеров до 0,03% абсолютного по золе в данном устройстве.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СЕПАРАЦИИ МАТЕРИАЛА | 1991 |
|
RU2005566C1 |
| УСТРОЙСТВО ДЛЯ АНАЛИЗА ЗОЛЬНОСТИ ПОТОКА УГЛЯ НА ЛЕНТЕ КОНВЕЙЕРА | 1992 |
|
RU2067028C1 |
| Способ измерения состава веществ | 1991 |
|
SU1799625A1 |
| СПОСОБ КОМПЛЕКСИРОВАНИЯ ИЗМЕРЕНИЙ | 1991 |
|
RU2035697C1 |
| САМОЛЕТ | 2005 |
|
RU2307048C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ БАЗОВОЙ СТАНЦИИ | 2011 |
|
RU2454000C1 |
| СПОСОБ СЕПАРАЦИИ ПОЛЕЗНЫХ ИСКОПАЕМЫХ | 1991 |
|
RU2022669C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КИНЕТИЧЕСКИХ ТЕПЛОФИЗИЧЕСКИХ СВОЙСТВ АНИЗОТРОПНЫХ КОМПОЗИТНЫХ МАТЕРИАЛОВ | 2020 |
|
RU2753620C1 |
| УСТРОЙСТВО КОНТРОЛЯ ПЕРЕМЕЩЕНИЯ ОБЪЕКТОВ ОТНОСИТЕЛЬНО ДРУГ ДРУГА | 2017 |
|
RU2662256C1 |
| Устройство диагностики состояния конструкций | 1988 |
|
SU1562845A1 |
Изобретение относится к измерительной технике и может быть использовано в приборах контроля состава и свойств различных веществ и материалов, например, для контроля состава полезных ископаемых и продуктов их переработки, контроля состава жидкостей и газов, контроля состава и свойств композиционных материалов и т.д. Техническим результатом изобретения является повышение точности измерений за счет учета неодинакового рассеивания сигналов при разных значениях контролируемого параметра. Этот результат достигается тем, что измерительное устройство, содержащее два измерительных преобразователя, связанные с ними входами интенсиметры, блок выделения наименьших значений и блок индикации и регистрации, снабжено блоками вычесления, программным запоминающим устройством генератором тактовых импульсов. Блоки вычисления реализуют такой алгоритм обработки сигнала, который позволяет учитывать рассеивание /различное измерение/ сигналов из-за случайных неодинаковых измерений неконтролируемых влияющих параметров. Такой алгоритм позволяет снизить на шесть порядков вероятность ошибок измерений. 2 ил.
УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВЕЩЕСТВА, содержащее два измерительных преобразователя, подключенные к ним соответственно два интенсиметра, блок определения двух наименьших значений и блок индикации и регистрации, отличающееся тем, что оно снабжено последовательно соединенными блоком памяти, блоком определения уравнений эллипсов разброса и координат их центров, блоком вычисления координат точек пересечения эллипсов разброса с прямыми, проходящими через соответствующие центры эллипсов разброса и точку текущего измерения, блоком определения отношений расстояний и блоком вычисления окончательного результата, выход которого подключен к входу блока индикации и регистрации, блоком определения расстояний от точки текущего измерения до центров ближайших эллипсов разброса и до точек пересечения, входы которого подключены к выходам интенсиметров и блока определения уравнений элипсов разброса и координат их центров, а выход - к входу блока определения двух наименьших значений, программным запоминающим устройством, подключенным к второму входу блока вычисления окончательного результата, и генератором тактовых импульсов, подключенным к управляющим входам всех блоков, а выход блока определения двух наименьших значений подключен к вторым входам блока определения отношения расстояний и блока вычисления координат точек пересечения эллипсов разброса с прямыми, проходящими через соответствующие центры элипсов разброса и точку текущего измерения, третьим входом связанным с выходом блока памяти.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Контрольно-измерительное устройство | 1979 |
|
SU1115815A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
