Изобретение относится к радиотехнике и может быть использовано для радиоконтроля систем сотовой связи.
Сотовая связь - вид мобильной радиосвязи, в основе которого лежит разделение зоны покрытия на ячейки (соты), определяющиеся зонами покрытия отдельных базовых станций. Базовая станция - системный комплекс приемопередающей аппаратуры, осуществляющий централизованное обслуживание группы оконечных абонентских устройств. В состав базовых станций входит комплект из трех-шести передатчиков и разнонаправленных антенн, излучающих, с перекрытием зоны действия соты.
В настоящее время наблюдается постоянное расширение и развитие сотовых систем связи и передачи данных. Конфигурация и территориальное размещение базовых станций регулируется государственной службой частотного регулирования и управления радиочастотным ресурсом путем выдачи соответствующих разрешений. В то же время, практика показывает, что не всегда количество, рабочие частоты и территориальное размещение базовых станций сотовой сети соответствуют выданным разрешением. Одной из задач государственной службы частотного регулирования и управления радиочастотным ресурсом является проверка соблюдения сотовыми операторами разрешений на деятельность, выявление нелицензионных базовых станций, отклонение местоположения базовых станций от условий выданных разрешений. Поэтому с целью контроля соблюдения разрешений и выявления нелицензионных базовых станций требуется решать задачу определения местоположения базовой станции.
Каждый передатчик базовой станции передает в эфир индивидуальные идентификационные признаки. Так, для стандарта GSM в качестве идентификатора передатчика используется идентификатор соты (CI), передаваемый в сообщениях широковещательного канала [1. Ашихмин А.В., Каюков И.В., Козьмин В.А., Манелис И.В. Анализатор базовых станций GSM-сетей на базе панорамного измерительного приемника АРГАМАК-ИМ. Специальная техника. №1, 2008, с.31-39]. Для CDMA-сетей в качестве идентификационных широковещательных данных сигналов базовой станции может использоваться индекс сдвига пилот ПСП PILOT_PN [2. Ашихмин А.В., Каюков И.В., Козьмин В.А., Манелис И.В. Анализатор базовых станций CDMA-сетей. Специальная техника. №3-4, 2008, с.16-26]. Для других сетей, например WI-FI, WI-MAX и т.д., также имеются идентификационные признаки передатчиков базовой станции.
Известным является способ определения параметров местоположения базовой станции мобильными станциями в системе беспроводной мобильной связи, включающий определение собственных координат мобильных станций, измерение задержек в каналах распространения сигналов между базовой станцией и мобильной станцией, и определение местоположения базовой станции на основе измеренных задержек сигналов и известного собственного местоположения мобильной станции. [3. Патент РФ №2331082, G01S 5/02, H04B 7/26, 2008].
Недостатком способа является то, что модуль глобального позиционирования мобильной станции должен обеспечивать точную временную синхронизацию приемной аппаратуры для определения временных задержек передаваемого сигнала, что является сложным и дорогостоящим. Способ имеет невысокую точность определения параметров местоположения.
Известен способ определения структуры систем связи, включающий синхронный прием, обнаружение и пеленгование сигналов передатчиков в станциях обнаружения-пеленгования (СОП), вычисление местоположения передатчиков триангуляционным способом в центральном пункте, связанном со всеми СОП, с использованием пеленгов, совпадающих по времени и частоте, и координат СОП, идентификацию последовательно обнаруженных радиосигналов по местоположениям передатчиков, и, в случае их совпадения, принятие решения о принадлежности излучений узлу связи (базовой станции). [4. Патент РФ №2151406, G01S 5/04, 5/14, H04B 17/00, 1999].
Основным ограничением способа являются значительные затраты на реализацию, связанные с необходимостью создания пеленгаторной системы СОП, большим объемом операций по передаче информации на центральный пункт и ее обработку. Другим недостатком является статистическая неустойчивость результатов идентификации, особенно в городских условиях. Это приводит к ошибкам определения состава и местоположения базовой станции.
Наиболее близким к предлагаемому способу по технической сущности является способ определения местоположения передатчика мобильным комплексом, включающий прием радиосигналов передатчика, синхронное измерение собственных координат мобильного комплекса и амплитуд принятых радиосигналов, преобразование результатов измерений в пространственный спектр и определение местоположения передатчика по максимуму пространственного спектра. При этом преобразование в пространственный спектр выполняют путем накопления за все время движения мобильного комплекса результатов измерения амплитуды с весами и нормировки на среднее квадратичное весов, определяемых расстоянием от мобильного комплекса с измеренными собственными координатами до мест возможного положения передатчика. [5. Патент РФ №2316784, G01S 5/02, 2006].
Область применения способа - ближайшего аналога ограничена условием всенаправленности антенны передатчика, когда ослабление его радиосигналов при распространении до мобильного комплекса не зависит от направления на него. Антенны передатчиков базовых станций сотовой связи направленные. Не учет данного фактора вызывает значительные аномальные погрешности определения координат, достигающие единиц километров. Достоверность определения координат в способе не оценивается. Кроме того, в базовую станцию входит несколько одновременно излучающих передатчиков, порядок получения и объединения информации о которых в способе не определен, как и информации о характеристиках антенн, известных при радиоконтроле ориентировочно, с точностью до возможных диапазонов изменения параметров: ширины диаграммы направленности порядка 60°-120°, угла ориентации в пределах 0°-360°.
Задачей данного изобретения является расширение функциональных возможностей, обеспечение применимости известного способа для определения местоположения базовых станций сотовой связи и характеристик направленности передающих антенн.
Технический результат, который может быть получен при осуществлении изобретения - повышение полноты, достоверности и точности радиоконтроля систем сотовой радиосвязи.
Для решения поставленной задачи с достижением указанного технического результата в известном способе определения местоположения базовой станции, включающем прием излученных базовой станцией сигналов и измерение их амплитуд, синхронное измерение собственных координат мобильного комплекса, преобразование результатов измерений в пространственный спектр и определение весовых коэффициентов, согласно изобретению прием и измерение амплитуды сигнала осуществляют от каждого передатчика базовой станции, предварительно определяют диаграмму направленности антенн передатчиков, ширину и угол ориентации которых квантуют в области их неопределенности, определяют и запоминают квантованные координаты зоны возможного местоположения базовой станции, на основании значений собственных координат мобильного комплекса и квантованных координат зоны возможного местоположения базовой станции определяют расстояние и пеленг, результаты которого используют для расчета диаграмм направленности в направлении на мобильный комплекс из мест возможного положения базовой станции
 ,
,
где  - диаграмма направленности антенн передатчиков базовой станции, представленная в виде степени кардиоиды, Δθ - 22,5° - квант угла ориентации антенны в горизонтальной плоскости, k=0, 1, …, 15 - номер этого кванта, h=1, 2, …, 5 - номер кванта ширины диаграммы направленности, - π≤θ≤π - направление прихода радиоволн,
- диаграмма направленности антенн передатчиков базовой станции, представленная в виде степени кардиоиды, Δθ - 22,5° - квант угла ориентации антенны в горизонтальной плоскости, k=0, 1, …, 15 - номер этого кванта, h=1, 2, …, 5 - номер кванта ширины диаграммы направленности, - π≤θ≤π - направление прихода радиоволн,
Θt(x, y) - пеленг из мест возможного положения базовой станции с координатами ż(x, y)=y+i·x на мобильный комплекс с координатами Żt=Yt+i·Xt,
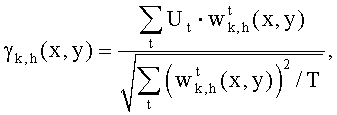
определяют весовые коэффициенты, путем деления значения диаграммы направленности в направлении на мобильный комплекс на вычисленное расстояние, преобразование результатов измерений в пространственный спектр для каждой пары квантованных параметров диаграммы антенны осуществляют по формуле
где Ut - амплитуда сигнала в момент времени t,
 - весовой коэффициент для каждой пары квантованных параметров диаграммы антенны (k, h), каждого момента (номера) измерений t и значений квантованных координат в зоне возможного местоположения базовой станции (x, y),
- весовой коэффициент для каждой пары квантованных параметров диаграммы антенны (k, h), каждого момента (номера) измерений t и значений квантованных координат в зоне возможного местоположения базовой станции (x, y),
rt(x, y) - расстояние между координатами точки измерения Żt=Yt+i·Xt и местом возможного положения базовой станции с координатами ż(x, y)=y+i·x, T - суммарное число измерений,
из полученного множества значений пространственного спектра выделяют максимальное, по координатам которого судят о местоположения базовой станции.
Таким образом, в заявленном способе производят синхронное измерение собственных координат мобильного комплекса, амплитуд, преобразование результатов измерений в пространственный спектр путем накопления измеренных амплитуд с весами и нормировки на среднее квадратичное весов, определяемых расстоянием от мобильного комплекса с измеренными собственными координатами до мест возможного положения базовой станции. С применением идентификационных признаков по принятым излучениям измеряют амплитуды радиосигналов каждого передатчика базовой станции. Предварительно перед процедурой определения координат определяют диаграмму направленности антенн передатчиков в зависимости от параметров ширины и угла ориентации, которые квантуют в области их неопределенности. После чего для каждого передатчика и каждой пары квантованных параметров преобразуют результаты измерений в пространственный спектр с образованием множества пространственных спектров. При этом веса определяют с учетом дополнительно значений диаграммы направленности в направлении на мобильный комплекс из мест возможного положения базовой станции, а по положению максимума множества пространственных спектров определяют координаты передатчика и диаграмму направленности его антенны. После чего местоположение базовой станции определяют усреднением координат передатчиков с построением эллипса рассеивания.
Физической основой достижения положительного эффекта заявленным способом является учет направленного характера антенн передатчиков базовых станций и влияния этого фактора на ослабление радиосигналов. Кроме того, учтены факторы однотипности антенн, что позволяет характеризовать их диаграммы только параметрами ширины и угла ориентации, а также пространственной сосредоточенности передатчиков, что позволяет рассматривать базовую станцию как точечный объект с возможностью усреднения координат ее передатчиков. Преобразованием измерений во множество пространственных спектров достигается максимально правдоподобное оценивание неизвестных параметров, а построением эллипса рассеивания по независимым засечкам координат передатчиков - оценка зоны неопределенности местоположения базовой станции.
Интегральный учет указанных факторов, в соответствии с предложенными новыми действиями и порядком их выполнения, позволяет обеспечить применимость известного способа в интересах радиоконтроля сотовой связи, расширить его функциональные возможности в части определения местоположения базовых станций и характеристик направленности их антенн.
Указанные преимущества, а также особенности настоящего изобретения поясняются лучшим вариантом его выполнения со ссылками на прилагаемые фигуры.
Фиг.1 изображает функциональную (структурную) схему мобильного комплекса радиоконтроля, в котором реализуется предложенный способ.
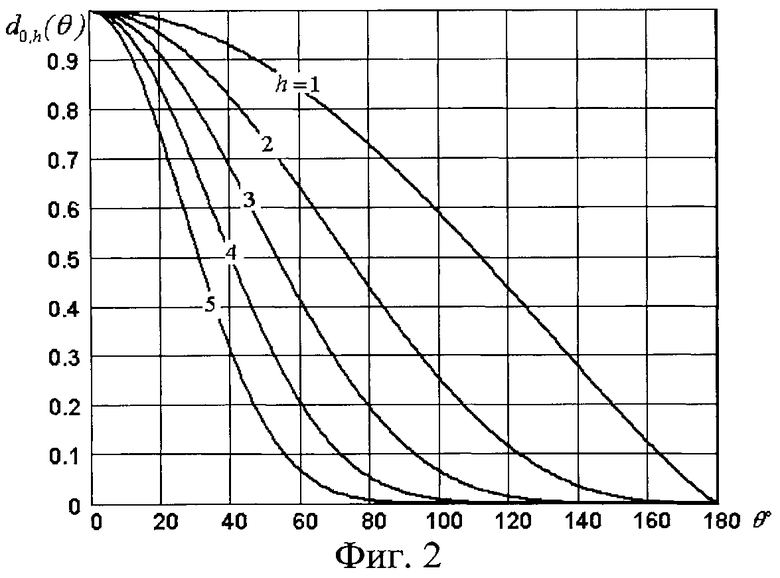
Фиг.2 - диаграммы направленности антенн передатчиков базовой станции.
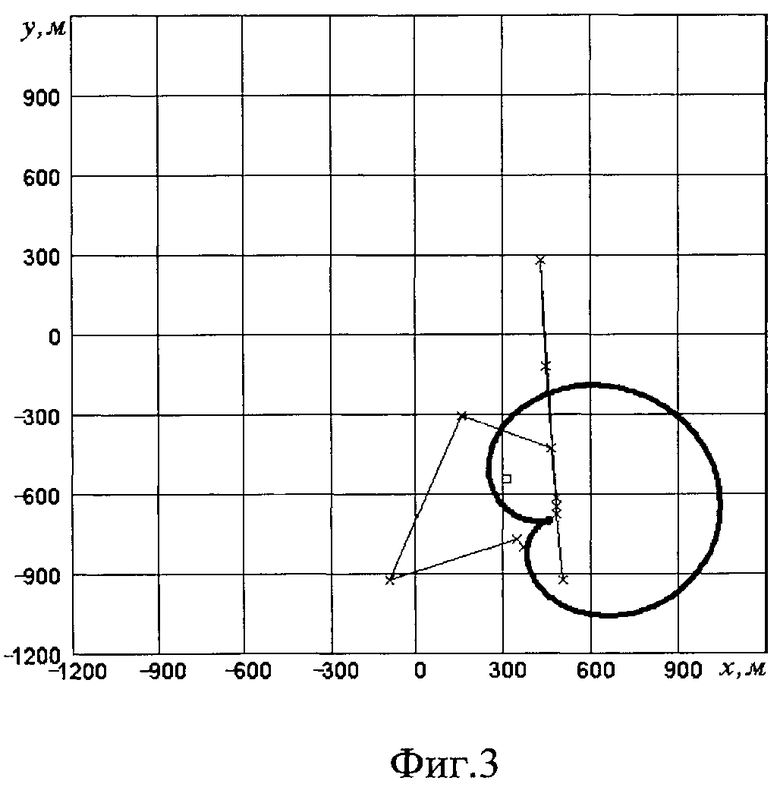
Фиг.3 - вариант индикации результатов определения характеристик передатчика.
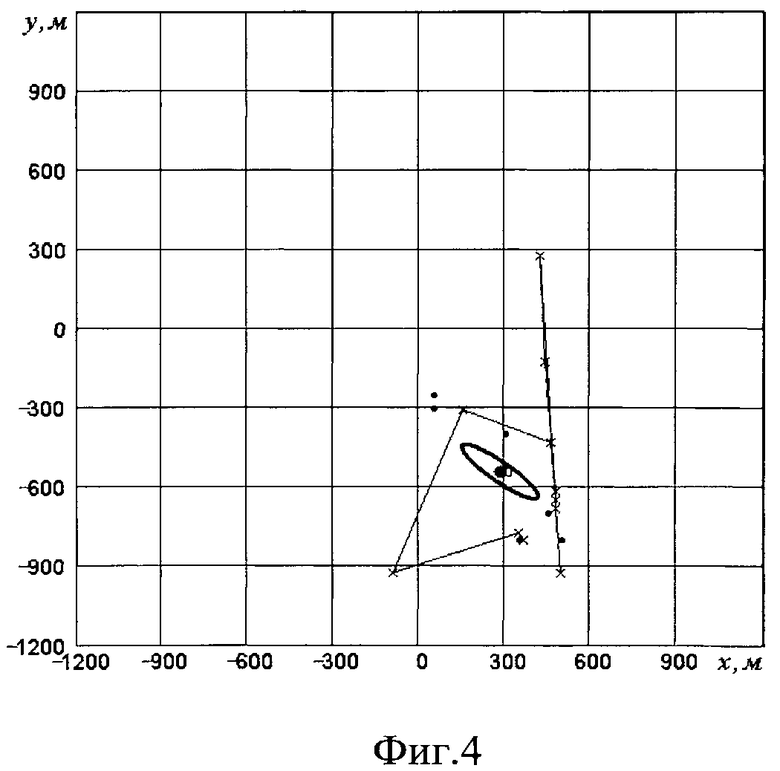
Фиг.4 - вариант индикации результатов определения местоположения базовой станции.
Мобильный комплекс радиоконтроля (фиг.1) содержит приемную антенну 1, подключенный к ней приемник 2, аппаратуру навигации 3, анализатор сигналов 4, оперативное запоминающее устройство (ОЗУ) амплитуды 5, ОЗУ координат 6, анализатор пространственного спектра 7, содержащий блок расчета весов 8, в состав которого входят вычислитель расстояний 9, запоминающее устройство (ЗУ) зоны 10, вычислитель пеленгов 11, делитель 12 и блок расчета диаграмм 13, и блок весовой обработки 14, последовательно соединенные ОЗУ пространственного спектра 15, блок определения максимума 16, вычислитель местоположения 17 и индикатор 18. Приемник 2, анализатор сигналов 4 через первый выход, ОЗУ амплитуды 5 через первый вход и блок весовой обработки 14 через первый вход соединены последовательно. Второй выход анализатора сигналов 4 подключен ко вторым входам ОЗУ амплитуды 5 и ОЗУ координат 6, выход которого подключен к первым входам вычислителя расстояний 9 и вычислителя пеленгов 11, выход которого через блок расчета диаграмм, второй вход делителя 12 подключен ко второму входу блока весовой обработки 14. ЗУ зоны 20 подключено ко вторым входам вычислителя пеленгов 11 и вычислителя расстояний 9 и через его выход к первому входу делителя 12. Выход аппаратуры навигации 3 соединен с первым входом ОЗУ координат 6. Выход блока весовой обработки 14 является выходом анализатора пространственного спектра 7 и подключен к входу ОЗУ пространственного спектра 15. Выходом блока расчета весов 8 является выход делителя 12.
Указанные элементы содержатся, например, в составе мобильного комплекса радиоконтроля «Аргумент» (Ашихмин А.В., Жуков А.А., Козьмин В.А., Шадрин И.А. Локализация источников радиоизлучений и измерение напряженности поля с помощью мобильной станции радиоконтроля. Специальная техника, 2003. Специальный выпуск, с.9-11). В частности, антенна 1, приемник 2, аппаратура навигации 3, анализатор сигналов 4 и индикатор 18 - непосредственно, а другие элементы могут быть введены в состав вычислительной системы станции.
Прием излучений базовой станции выполняют с помощью всенаправленной антенны 1 и приемника 2 типа «Аргамак - ИМ» (Ашихмин А.В., Каюков И.В., Козьмин В.А., Манелис И.В. Анализатор базовых станций GSM-сетей на базе панорамного измерительного приемника АРГАМАК-ИМ. Специальная техника. №1, 2008, с.31-39).
С помощью анализатора сигналов 4 по принятым излучениям измеряют амплитуды (уровни) радиосигналов каждого передатчика базовой станции, для чего используют их идентификационные признаки. С выхода 1 анализатора 4 выдают измеренные значения амплитуды, а с выхода 2 - идентификационный номер передатчика. В зависимости от вида сотовой сети измерения выполняют для каждого передатчика базовой станции в порядке их выхода в эфир или одновременно, в режиме многоканальных измерений с частотным или кодовым разделением, при одновременном излучении передатчиков. Описание принципов построения и функционирование анализатора сигналов приведено, например, в (Ашихмин А.В., Каюков И.В., Козьмин В.А. Манелис В.Б. Анализатор базовых станций CDMA сетей. Специальная техника. №3-4, 2008, с.16-26).
Измерения амплитуды радиосигналов в анализаторе сигналов 4 и собственных координат мобильного комплекса аппаратурой навигации 3 выполняют синхронно. Результаты регистрируют в ОЗУ 5 и 6, соответственно. Запись данных выполняют для каждого передатчика базовой станции раздельно, в установленных областях памяти. Для этого на первые входы этих ОЗУ подают результаты измерений (амплитуды в блок 5 с первого выхода анализатора сигналов 4 и собственных координат мобильного комплекса в блок 6 с выхода аппаратуры навигации 3), а на вторые - идентификационный номер передатчика со второго выхода анализатора сигналов 4. Типичный темп измерений составляет 12-14 измерений/мин, время движения мобильного комплекса радиоконтроля до 1 часа. Тогда, с учетом возможной комплектации контролируемой базовой станции шестью передатчиками, максимальный объем измерений, накапливаемых в каждом из этих оперативных запоминающих устройств, составит порядка 5·103 значений (слов).
Запоминающее устройство зоны 10 предназначено для хранения и считывания квантованных координат в зоне возможного местоположения базовой станции: ż(x, y)=y+i·x, где x, y координаты представлены в декартовой системе, в комплексном виде, i - мнимая единица. Шаг квантования координат определяется заданной инструментальной точностью (принято 20 м). Тогда, в типовой зоне радиоконтроля 2×2 км общее число узлов сетки координат (квантов) составит 104, а требуемый объем памяти ЗУ зоны 10 вдвое больше, с учетом комплексного представления координат.
Оперативное запоминающее устройство пространственного спектра 15 предназначено для образования и регистрации множества пространственных спектров каждого передатчика и каждой пары квантованных неизвестных параметров их антенн - ширины диаграммы направленности и угла ориентации диаграммы в горизонтальной плоскости. Каждый из пространственных спектров определяется в 104 узлах сетки координат зоны радиоконтроля. Объем множества (число элементов, каждым из которых является пространственный спектр) определяется числом квантов, или произведением числа уровней квантования ширины и угла ориентации диаграммы направленности антенн, в области их неопределенности, а также количеством передатчиков базовой станции.
Диаграмму направленности антенн передатчиков базовой станции определяют предварительно, до начала работы мобильного комплекса в зависимости от параметров ее ширины и угла ориентации, которые квантуют в области их неопределенности или области их возможного изменения. Общее число квантов определяется из условия их минимального количества для обеспечения заданной инструментальной погрешности определения местоположения базовой станции (не хуже 20 м).
Указанному условию удовлетворяет вариант, когда диаграмму направленности антенн передатчиков базовой станции определяют в виде степени кардиоиды:

где Δθ=22,5° - квант угла ориентации антенны в горизонтальной плоскости, k=0, 1, …, 15 - номер этого кванта, h=1, 2, …, 5 - номер кванта ширины диаграммы направленности, -π≤θ≤π - направление прихода радиоволн.
Здесь и далее отсчет угловых величин выполняют от опорного направления, например, на Север, по часовой стрелке.
Диаграммы направленности антенн передатчика для k=0 и квантованных, в соответствии с формулой (1), значений ширины, показаны на фиг.2. В силу симметрии диаграмм показана только область положительных значений направлений θ. Ширина диаграмм направленности на уровне 0.707 от максимума составляет 45, 60, 75, 90, 170 градусов, что охватывает возможный диапазон их изменения 60°-120° и типовые значения. Диапазон неопределенности угла ориентации составляет 0°-360°. Соответственно определяется и область неопределенности параметров антенн передатчиков в целом. С учетом шести передатчиков, числа точек представления пространственных спектров 104 и параметров квантования в формуле (1) общий объем ОЗУ пространственного спектра 15 составляет 6·104·16·5≈5·106 значений (слов).
Принцип последующего функционирования мобильного комплекса радиоконтроля состоит в следующем.
После выполнения очередных измерений и записи их в ОЗУ 5, 6 или по требованию оператора считывают из соответствующих областей этих ОЗУ результаты измерений по первому передатчику: измеренные амплитуды Ut и собственные координаты мобильного комплекса Żt=Yt+i·Xt, где t=1, 2, …, T - номер измерения при общем количестве T≥2.
В блоке 8 расчета весов анализатора пространственного спектра 7 последовательно по мере поступления данных определяют расстояния rt и пеленги Θt из мест возможного положения базовой станции с координатами ż(x, y)=y+i·x на мобильный комплекс с координатами Żt=Yt+i·Xt:


где arg(·) - аргумент комплексной величины, заключенной в скобки (фаза вектора).
При этом координаты мобильного комплекса Żt подают на первые входы вычислителей 9, 11 с выхода ОЗУ 6, а квантованные координаты возможного местоположения базовой станции ż(x, y) на их вторые входы с запоминающего устройства 10.
Полученные пеленги поступают в блок расчета диаграмм 13, где поочередно, для каждой пары квантованных параметров диаграммы: кванта угла ориентации антенны k=0, 1, …, 15 и кванта ширины диаграммы направленности h=1, 2, …, 5, определяют с учетом формулы (3), значения диаграммы направленности в направлении на мобильный комплекс из мест возможного положения базовой станции

Для ускорения процесс (4) определения значений диаграммы направленности, может быть реализован посредством предварительных вычислений всего их множества с записью в дополнительное ЗУ и считывания информации по пеленгу (3) и координатам (x, y). Значения пеленга в этом случае квантуют с шагом, например, 1 градус.
Затем значения (4) диаграммы направленности с выхода блока расчета 13 поступают на второй вход делителя 12, где их делят на расстояние (2), поступающее с выхода вычислителя 9 на первый вход делителя, и определяют веса:

Таким образом, веса определяют с учетом расстояний и значений диаграммы направленности в направлении на мобильный комплекс из мест возможного положения базовой станции. Эти веса определяют для каждого передатчика (в настоящий момент для первого передатчика), каждой пары квантованных параметров диаграммы антенны (k, h), каждого момента (номера) измерений t и значений квантованных координат в зоне возможного местоположения базовой станции (x, y).
В блоке весовой обработки 14 завершают процесс преобразования результатов измерений в пространственный спектр путем накопления измеренных амплитуд (поступают на первый вход блока 14 с выхода ОЗУ амплитуды 5) с весами (5), поступают с выхода делителя 12 блока расчета весов 8, и нормировки на среднее квадратичное весов

Пространственные спектры получают для каждой пары квантованных параметров диаграммы антенны (k, h) и записывают с выхода анализатора пространственного спектра 7 (выхода блока 14) в ОЗУ пространственного спектра 15 с образованием множества пространственных спектров, например, в виде блочной матрицы.
После получения полного множества пространственных спектров их считывают из ОЗУ 15 и подают на вход блока определения максимума (16). В этом блоке определяют положение максимума множества пространственных спектров по координатам (x, y) и квантованным параметрам диаграммы (k, h), в результате получают оценочные координаты передатчика и параметры его антенны

где s=1, 2, …S - номер передатчика базовой станции при общем количестве S (на данном этапе s=1).
Результаты оценки (7) передают в вычислитель местоположения 17, а описанный процесс преобразований продолжают применительно к результатам измерений по всем другим передатчикам базовой станции.
Текущие на момент наблюдения оценки координат передатчика и параметров антенны транслируют через вычислитель местоположения 17 на индикатор, где их отображают на дисплее. Вариант индикации результатов определения характеристик передатчика по данным натурных измерений показан на фиг.3. Крестиками с соединением тонкой линией показано местоположение мобильного комплекса в моменты измерений (трасса движения), толстой линией - диаграмма направленности передатчика в соответствии с (1) для оценочных параметров (7) в месте оценочных координат (жирная точка), квадратик - истинные координаты базовой станции. При небольшом числе измерений (в данном примере T=11) погрешности определения координат могут быть значительные.
Повышение точности достигается усреднением в вычислителе 17 координат всех передатчиков с построением эллипса рассеивания. Усреднение

где  дает точечную оценку местоположения базовой станции
дает точечную оценку местоположения базовой станции  более полной характеристикой которой служит эллипс рассеивания.
более полной характеристикой которой служит эллипс рассеивания.
Для построения эллипса рассеивания:
- задают вероятность попадания оценки в эллипс рассеивания p=0.86;
- с учетом известных свойств двухмерного нормального закона распределения (Вентцель Е.С. Теория вероятностей. - М.: Высшая школа, 2002 г., с.195-199, 350) определяют потребное число w средних квадратических отклонений (СКО) оценки местоположения базовой станции, укладывающееся на полуосях эллипса для обеспечения заданной вероятности попадания оценки местоположения в эллипс рассеивания

- определят СКО оценки местоположения по осям х, у и коэффициент корреляции

где Re(·), Im(·) - реальная и мнимая часть числа, заключенного в скобки;
- определяют параметры эллипса:
угол наклона оси

полуоси


- определяют уравнение эллипса в каноническом виде и параметрической форме

- переопределяют уравнение эллипса в исходную декартову систему координат с учетом поворота осей и параллельного переноса в точку оценивания

Особенность описанного способа построения эллипса рассеивания состоит в том, что при стандартном оценивании коэффициента ρ корреляции засечек координат передатчиков, СКО оценки местоположения по осям x, y получают, уменьшая в корень из числа передатчиков раз (дополнительное деление на S в формулах (10) оценочных СКО засечек передатчиков. Этим учитывают снижение СКО оценки местоположения базовой станции при усреднении (8) координат передатчиков.
На фиг.4 показан вариант индикации результатов определения местоположения базовой станции, состоящей из шести (S=6) передатчиков. Толстой линией с точкой в центре показан эллипс рассеивания, построенный в соответствии с формулами (8)-(15), мелкими точками - засечки координат передатчиков. Обозначения трассы движения и истинных координат базовой станции соответствуют принятым для фиг.3. В приведенном примере истинное местоположение базовой станции находится непосредственно внутри эллипса рассеивания.
Эффективность изобретения выражается в расширении функциональных возможностей, обеспечении применимости способа для определения местоположения базовых станций сотовой связи и характеристик направленности передающих антенн, в повышении полноты, достоверности и точности радиоконтроля систем сотовой радиосвязи.
Количественная оценка выполнена с помощью мобильного комплекса радиоконтроля «Аргумент» в условиях индустриального города. Обследовано 8 CDMA и GSM базовых станций сотовой связи с числом передатчиков от трех до шести, числом измерений по каждому передатчику в пределах 7-48, при максимальном удалении от базовых станций до 2 км. Расстояние между точками измерений в среднем 300-400 м. Средняя линейная ошибка местоопределения базовых станций составила 70 м при среднем квадратическом отклонении 40 м. Полученные результаты позволили локализовать базовые станции с точностью до зданий, на которых они расположены. Принятый способ индикации с построением эллипса рассеивания обеспечил эффективный контроль достоверности местоопределения и своевременное завершение движения мобильного комплекса по накоплении достаточного для обеспечения требуемой точности объема измерений.
Наиболее успешно заявленный способ определения местоположения базовой станции промышленно применим для радиоконтроля систем сотовой связи.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПЕРЕДАТЧИКА МОБИЛЬНЫМ ПЕЛЕНГАТОРОМ | 2006 |
|
RU2316784C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СТРУКТУРЫ СИМПЛЕКСНОЙ РАДИОСЕТИ МОБИЛЬНЫМ ПЕЛЕНГАТОРОМ | 2008 |
|
RU2383031C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПЕРЕДАТЧИКА ПЕРЕНОСНЫМ ПЕЛЕНГАТОРОМ | 2009 |
|
RU2405166C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ РАДИОПЕРЕДАТЧИКА МОБИЛЬНОЙ СТАНЦИЕЙ РАДИОКОНТРОЛЯ | 2006 |
|
RU2307372C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ РАДИОСИГНАЛОВ КОНТРОЛИРУЕМОГО ОБЪЕКТА И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА | 2011 |
|
RU2496118C2 |
| СПОСОБ ОДНОПУНКТНОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА КОРОТКОВОЛНОВОГО ИЗЛУЧЕНИЯ | 2012 |
|
RU2523650C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОГО СПЕКТРА | 2011 |
|
RU2452974C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЧАСТОТНОГО СДВИГА МЕЖДУ РАДИОСИГНАЛАМИ | 2017 |
|
RU2668342C2 |
| СПОСОБ ДВУХМЕРНОГО ПЕЛЕНГОВАНИЯ ВОЗДУШНОГО ОБЪЕКТА | 2013 |
|
RU2535174C1 |
| Способ одноэтапного адаптивного определения координат источников радиоизлучений | 2021 |
|
RU2768011C1 |
Способ предназначен для радиоконтроля систем сотовой связи. Достигаемый технический результат - повышение полноты, достоверность и точности радиоконтроля систем сотовой радиосвязи. Указанный результат достигается за счет того, что способ включает прием излученных базовой станцией сигналов и измерение их амплитуд, синхронное измерение собственных координат мобильного комплекса, преобразование результатов измерений в пространственный спектр и определение весовых коэффициентов. Прием и измерение амплитуды сигнала осуществляют от каждого передатчика базовой станции, предварительно определяют диаграмму направленности антенн передатчиков, ширину и угла ориентации которых квантуют в области их неопределенности. Определяют и запоминают квантованные координаты зоны возможного местоположения базовой станции. На основании значений собственных координат мобильного комплекса и квантованных координат зоны возможного местоположения базовой станции определяют расстояние и пеленг, результаты которого используют для расчета диаграмм направленности в направлении на мобильный комплекс из мест возможного положения базовой станции. Определяют весовые коэффициенты и осуществляют преобразование результатов измерений в пространственный спектр для каждой пары квантованных параметров диаграммы антенны. Из полученного множества значений пространственного спектра выделяют максимальное, по координатам которого судят о местоположения базовой станции. 4 ил.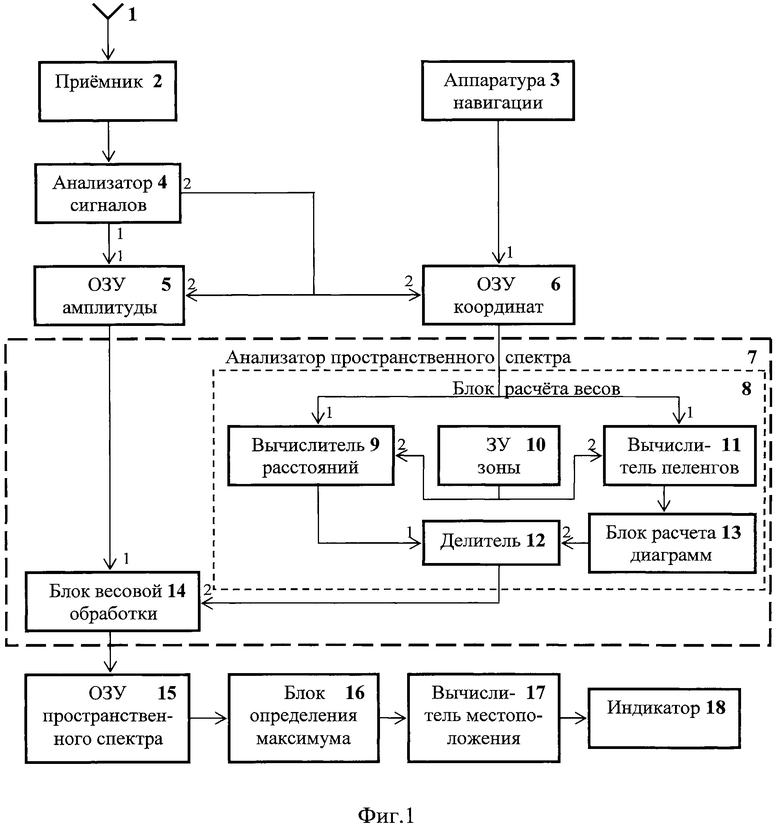
Способ определения местоположения базовой станции, включающий прием излученных базовой станцией сигналов и измерение их амплитуд, синхронное измерение собственных координат мобильного комплекса, преобразование результатов измерений в пространственный спектр и определение весовых коэффициентов, отличающийся тем, что прием и измерение амплитуды сигнала осуществляют от каждого передатчика базовой станции, предварительно определяют диаграмму направленности антенн передатчиков, ширину и угол ориентации которых квантуют в области их неопределенности, определяют и запоминают квантованные координаты зоны возможного местоположения базовой станции, на основании значений собственных координат мобильного комплекса и квантованных координат зоны возможного местоположения базовой станции определяют расстояние и пеленг, результаты которого используют для расчета диаграмм направленности в направлении на мобильный комплекс из мест возможного положения базовой станции 
где  диаграмма направленности антенн передатчиков базовой станции, представленная в виде степени кардиоиды, Δθ=22,5° - квант угла ориентации антенны в горизонтальной плоскости, k=0,1, …, 15 - номер этого кванта, h=1, 2, …, 5 - номер кванта ширины диаграммы направленности, - π≤θ≤π - направление прихода радиоволн, Θt(х, у) - пеленг из мест возможного положения базовой станции с координатами ż(x, y)=y+i·x на мобильный комплекс с координатами
диаграмма направленности антенн передатчиков базовой станции, представленная в виде степени кардиоиды, Δθ=22,5° - квант угла ориентации антенны в горизонтальной плоскости, k=0,1, …, 15 - номер этого кванта, h=1, 2, …, 5 - номер кванта ширины диаграммы направленности, - π≤θ≤π - направление прихода радиоволн, Θt(х, у) - пеленг из мест возможного положения базовой станции с координатами ż(x, y)=y+i·x на мобильный комплекс с координатами
Żt=Yt+i·Xt,
определяют весовые коэффициенты, путем деления значения диаграммы направленности в направлении на мобильный комплекс на вычисленное расстояние, преобразование результатов измерений в пространственный спектр для каждой пары квантованных параметров диаграммы антенны осуществляют по формуле
где Ut - амплитуда сигнала в момент времени t,
- весовой коэффициент для каждой пары квантованных параметров диаграммы антенны (k, h), каждого момента (номера) измерений t и значений квантованных координат в зоне возможного местоположения базовой станции (x, y), rt(x, y) - расстояние между координатами точки измерения Żt=Yt+i·Xt и местом возможного положения базовой станции с координатами ż(x, y)=y+i·x, T - суммарное число измерений, из полученного множества значений пространственного спектра выделяют максимальное, по координатам которого судят о местоположении базовой станции.
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПЕРЕДАТЧИКА МОБИЛЬНЫМ ПЕЛЕНГАТОРОМ | 2006 |
|
RU2316784C1 |
| ИСПОЛЬЗОВАНИЕ МОБИЛЬНЫХ СТАНЦИЙ ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ МЕСТОПОЛОЖЕНИЯ БАЗОВОЙ СТАНЦИИ В СИСТЕМЕ БЕСПРОВОДНОЙ МОБИЛЬНОЙ СВЯЗИ | 2002 |
|
RU2331082C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ МОБИЛЬНОГО ТЕРМИНАЛА В БЕСПРОВОДНОЙ ИНФОРМАЦИОННОЙ СЕТИ | 2007 |
|
RU2360378C1 |
| СОТОВАЯ СИСТЕМА СВЯЗИ | 1991 |
|
RU2100904C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ | 1996 |
|
RU2137150C1 |
| ВСЕСОЮЗНАЯ ПДТ?НТНО-ТЕХНМЧЕСК ^БИБЛИОТЕКА | 0 |
|
SU303371A1 |
| US 2004203908 A1, 31.12.2002 | |||
| US 7126527 B1, 24.10.2006 | |||
| US 6167274 A, 26.12.2000. | |||

