Изобретение относится к электромеханике, а более точно к структуре с переменной емкостью, и может быть использовано в радиоэлектронике, устройствах автоматики и вычислительной техники и других областях в качестве привода возвратно-поступательного перемещения и генератора электрической энергии.
Известна структура с переменной емкостью, содержащая два электрода, первый из которых выполнен в виде гибкой пластины, закрепленной в корпусе. Второй электрод имеет выпуклую поверхность, обращенную к первому электроду, причем на этой поверхности выполнены изолированные друг от друга сферические выступы, имеющие при перемещении второго электрода в направлении к первому возможность контактировать с первым электродом. В структуре также предусмотрен механизм взаимного перемещения электродов.
Указанная структура позволяет регулировать емкость в пределах площади контакта сферических выступов с первым электродом. Однако диапазон изменения емкости в данной конструкции структуры ограничен габаритами электродов.
Известна также структура с переменной емкостью, содержащая две пластины и множество диэлектрических пленок, расположенных между пластинами одна над другой, крайние из которых жестко связаны с пластинами и которые снабжены токопроводящим покрытием, расположенным на их поверхностях, обращенных в сторону одной пластины, и имеют участки механического соединения соседних диэлектрических пленок, расположенные с постоянным шагом и со смещением на половину этого шага для последующих соседних диэлектрических пленок, причем токопроводящие покрытия всех диэлектрических пленок, расположенных через одну, электрически соединены соответственно с двумя выводами.
В указанной структуре с переменной емкостью участки соединения соседних диэлектрических пленок образованы жесткими монолитными прокладками, в частности кольцевыми, жестко связанными с диэлектрическими пленками. Такое соединение соседних диэлектрических пленок либо не позволяет диэлектрическим пленкам контактировать друг с другом, либо ограничивает площадь их контакта из-за наличия прокладок. По существу, указанная конструкция позволяет изменять объем структуры не более чем в два раза, тем самым ограничивая диапазон изменения емкости, который является более широким по сравнению с описанной конструкцией структуры, но недостаточным для объектов, использующих структуру с переменной емкостью в качестве исполнительного механизма.
В основу изобретения положена задача создать структуру с переменной емкостью, в которой за счет уменьшения расстояния между соседними диэлектрическими пленками на участках их соединения обеспечивалось бы увеличение диапазона изменения емкости.
Поставленная задача решается тем, что в структуре с переменной емкостью, содержащей две пластины и множество диэлектрических пленок, расположенных между пластинами одна над другой, крайние из которых жестко связаны с пластинами и которые снабжены токопроводящими покрытиями, расположенными на их поверхностях, обращенных в сторону одной пластины, и имеют участки механического соединения соседних диэлектрических пленок, расположенные с постоянным шагом и со смещением на половину этого шага для последующих соседних диэлектрических пленок, причем токопроводящие покрытия всех диэлектрических пленок, расположенных через одну, электрически соединены соответственно с двумя выводами, на участках соединения соседних диэлектрических пленок эти диэлектрические пленки непосредственно соединены между собой.
Каждый участок непосредственного соединения соседних диэлектрических пленок представляет собой множество дискретных отрезков.
Периферийные участки токопроводящих покрытий всех диэлектрических пленок, расположенных через одну, непосредственно соединены между собой, при этом выводы соединены с этими периферийными участками.
Для непосредственного соединения периферийных участков токопроводящих покрытий всех диэлектрических пленок, расположенных через одну, диэлектрическими пленками служат слои плоского рулона, образованного намоткой двух диэлектрических пленок с токопроводящими покрытиями, при этом участки непосредственного соединения соседних слоев плоского рулона расположены на его плоских участках и перпендикулярны направлению намотки.
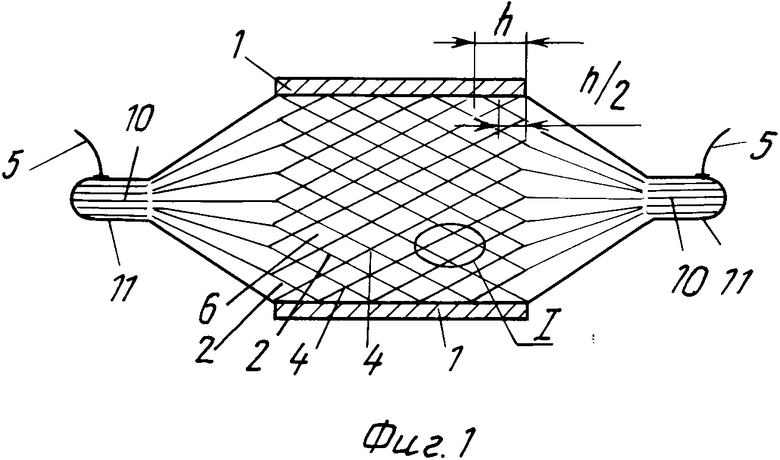
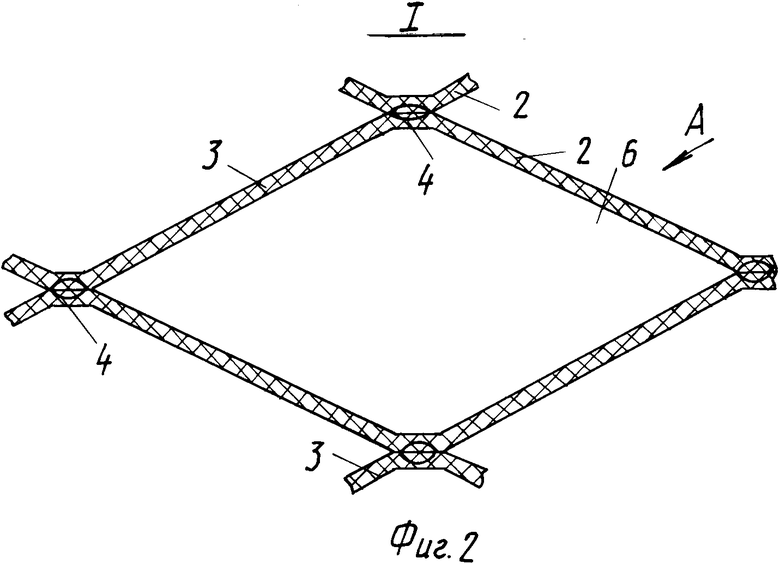
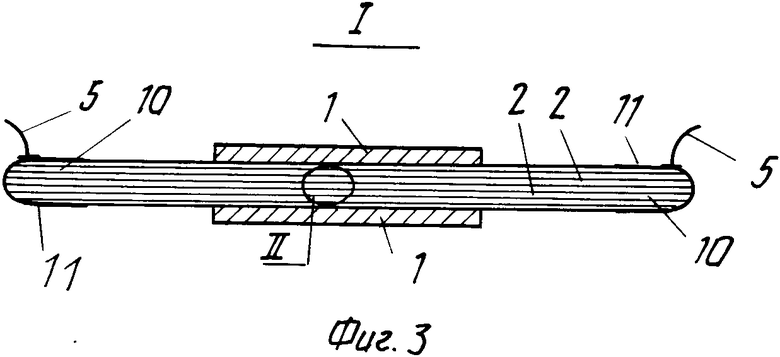
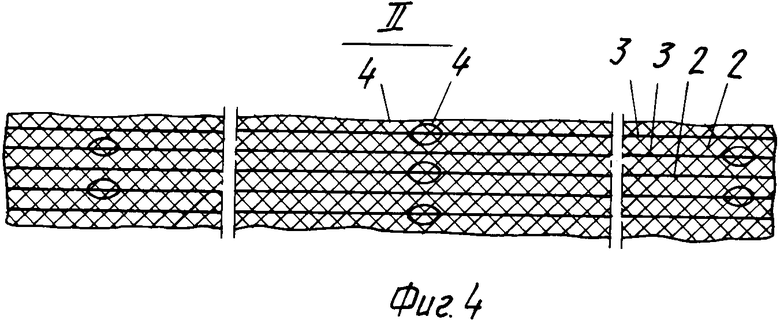
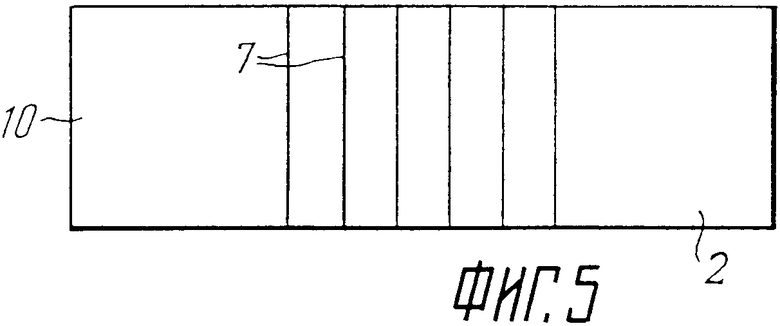
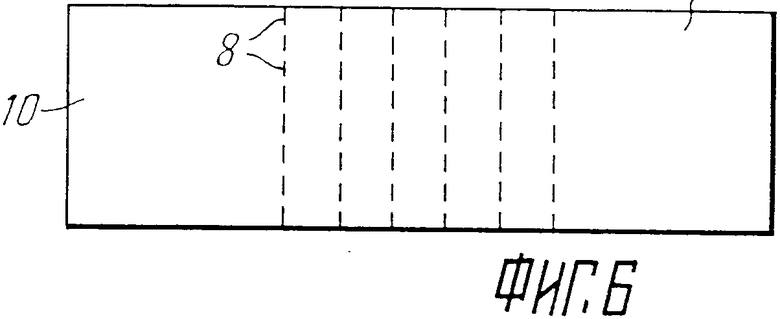
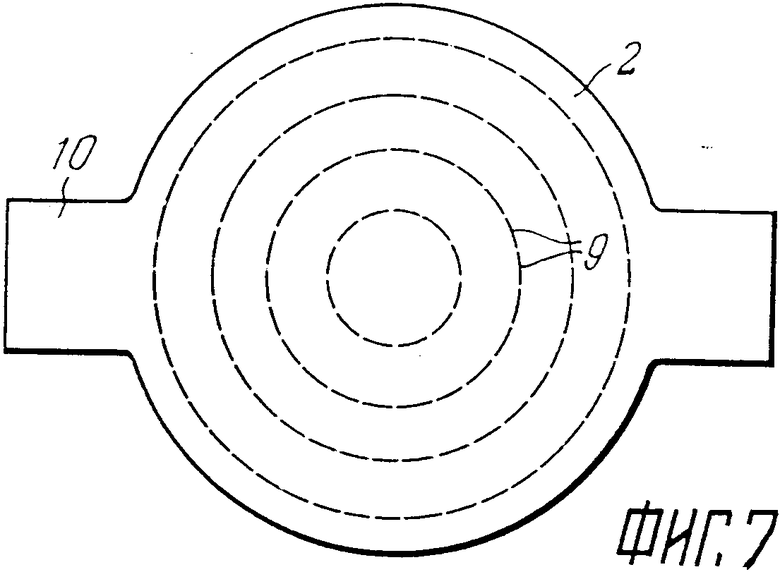
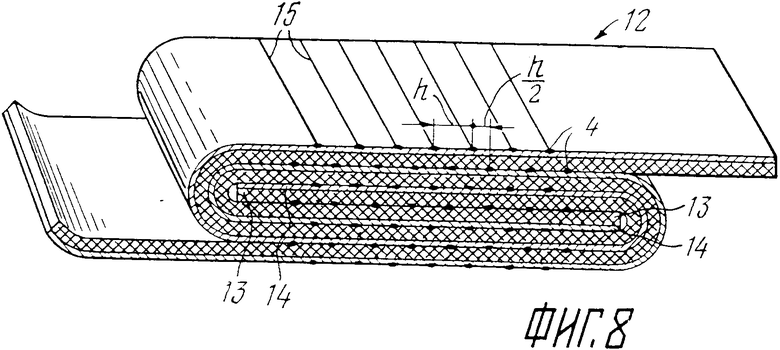
На фиг. 1 изображен общий вид предлагаемой структуры в крайнем положении диэлектрических пленок, соответствующем минимальной емкости структуры (поперечный разрез пластин и диэлектрических пленок); на фиг. 2 - вид по стрелке А на фиг. 1; на фиг. 3 - то же, в другом крайнем положении диэлектрических пленок, соответствующем максимальной емкости структуры; на фиг. 4 - вид по стрелке Б на фиг. 3; на фиг. 5 - структура с участками непосредственного соединения соседних диэлектрических пленок, представляющими собой сплошные прямые линии, вид сверху; на фиг. 6 - то же, представляющими собой множество дискретных отрезков прямой, вид сверху; на фиг. 7 - структура с участками непосредственного соединения соседних диэлектрических пленок, представляющими собой множество дискретных отрезков дуг, ориентированных по концентрическим окружностям вид сверху; на фиг. 8 - вариант выполнения структуры в виде плоского рулона из двух диэлектрических пленок, аксонометрия; на фиг. 9 - общий вид датчика линейного перемещения объектов, частичный поперечный разрез; на фиг. 10 - общий вид электростатического двигателя со средством возврата подвижной пластины структуры с переменной емкостью в исходное положение, выполненным в виде пружины, частичный продольный разрез; на фиг. 11 - временная диаграмма напряжения на выходе первого генератора чередующихся разнополярных импульсов электростатического двигателя; на фиг. 12 - то же, со средством возврата подвижной пластины структуры с переменной емкостью в исходное положение, выполненным в виде аналогичной структуры с переменной емкостью, частичный продольный разрез; на фиг. 13 - временная диаграмма напряжения на выходе второго генератора чередующихся разнополярных импульсов электростатического двигателя; на фиг. 14 - общий вид электростатического генератора, частичный продольный разрез; на фиг. 15 - временная диаграмма напряжения на выходе генератора чередующихся разнополярных импульсов электростатического генератора.
Структура с переменной емкостью (конденсатор переменной емкости) содержит две пластины 1 и множество диэлектрических пленок 2, расположенных между пластинами 1 одна над другой, крайние из которых жестко связаны с пластинами 1 и которые снабжены токопроводящими покрытиями 3, расположенными на их поверхностях, обращенных в сторону одной пластины 1. В описываемом варианте диэлектрические пленки 2 выполнены из полиэтилентерефталата и имеют токопроводящее покрытие 3 из алюминия. Диэлектрические пленки 2 непосредственно соединены между собой на участках 4 непосредственного соединения соседних диэлектрических пленок. При этом участки 4 расположены с постоянным шагом h и со смещением на половину этого шага h для последующих соседних диэлектрических пленок 2 и образуют ячеистую структуру. В ячеистой структуре токопроводящие покрытия 3 всех диэлектрических пленок 2, расположенных через одну, соединены соответственно с двумя выводами 5, а ячейки 6 способны изменять свою конфигурацию при перемещении диэлектрических пленок 2 из одного крайнего положения (см. фиг. 1) в другое крайнее положение (см. фиг. 3) в направлении, перпендикулярном поверхностям пластин 1. При этом участки 4 непосредственного соединения соседних диэлектрических пленок обеспечивают ячейкам 6 такое изменение конфигурации, при котором ячейки 6 смыкаются противоположными в направлении перемещения поверхностями по существу по всей их площади (см. фиг. 3 и 4) в одном крайнем положении пленок 2, соответствующем максимальному значению емкости структуры с переменной емкостью. В другом крайнем положении пленок 2, соответствующем минимальному значению емкости структуры с переменной емкостью, между противоположными поверхностями ячеек 6 образуется зазор переменной величины, имеющий минимальное значение вблизи участков 4 непосредственного соединения соседних диэлектрических пленок. Таким образом, конфигурация ячеек 6 в крайнем положении диэлектрических пленок 2, соответствующем минимальному значению емкости структуры с переменной емкостью, зависит от того, каковы участки 4 непосредственного соединения и как они расположены.
Используемые в настоящее время диэлектрические пленки 2 имеют толщину 10-0,01 мкм, при этом непосредственное их соединение может быть осуществлено с помощью клея, а также лазерной и диффузионной сварки, что является более предпочтительным с точки зрения минимального расстояния между диэлектрическими пленками 2 на участке 4 непосредственного соединения. В зависимости от областей применения структуры с переменной емкостью и способов соединения диэлектрических пленок 2 участки 4 непосредственного соединения соседних диэлектрических пленок представляют собой линии, расположенные по существу на одинаковых расстояниях друг от друга по их длине: сплошные прямые линии 7, множество дискретных отрезков 8 прямой, ориентированных по прямым линиям, а также множество дискретных отрезков 9 дуг, ориентированных по концентрическим окружностям.
В показанном на фиг. 1 варианте структуры с переменной емкостью ячейки 6 образованы участками 4, представляющими собой сплошные прямые линии 7, при которых ячейки 6 имеют в сечении, перпендикулярном их осям, ромбовидную форму в одном из промежуточных или крайнем положении диэлектрических пленок 2, соответствующем минимальному значению емкости структуры с переменной емкостью. Выводы 5 структуры могут быть непосредственно связаны с каждым соответствующим токопроводящим покрытием 3 (см. фиг. 2). Для упрощения конструкции выводы 5 (см. фиг.1) связаны с периферийными участками 10 токопроводящих покрытий 3 (см. фиг. 2) диэлектрических пленок 2, расположенных через одну, а сами участки 10 (см. фиг. 1) непосредственно соединены между собой, например, с помощью токопроводящего клея. При этом выводы 5 в описываемом варианте присоединены к металлическим скобам 11, охватывающим периферийные участки 10.
Для непосредственного соединения периферийных участков 10 токопроводящих покрытий 3 (см. фиг. 2) всех диэлектрических пленок 2 ячеистой структуры, расположенных через одну, диэлектрическими пленками 2 служат слои плоского рулона 12, образованного намоткой двух диэлектрических пленок 13 с токопроводящими покрытиями 14. При этом линии 15 соединения соседних слоев плоского рулона расположены с постоянным шагом h на его плоских участках и перпендикулярны направлению намотки. Для последующих соседних слоев плоского рулона 12 линии 15 соединения смещены по существу на половину шага h, что соответствует соединению отдельных диэлектрических пленок 2 (см. фиг. 1-7).
Перестройка структуры с переменной емкостью осуществляется следующим образом.
В результате механического перемещения пластин 1, которое может быть осуществлено, в частности, с помощью механизма перестройки, изменяется величина зазора между противоположными в направлении перемещения поверхностями всех ячеек 6 ячеистой структуры. При этом изменяется усредненное расстояние между токопроводящими покрытиями 3 (см. фиг. 2) диэлектрических пленок 2, а следовательно, и емкость структуры с переменной емкостью в соответствии с выражением:
C=  , (1) где С - емкость структуры;
, (1) где С - емкость структуры;
εo - электрическая постоянная;
ε- относительная диэлектрическая проницаемость;
S - рабочая площадь токопроводящих покрытий 3;
d - усредненное расстояние между токопроводящими покрытиями 3 соседних диэлектрических пленок 2.
Из выражения (1) видно, что при изменении усредненного расстояния между токопроводящими покрытиями 3 изменяется емкость структуры. При этом диапазон изменения емкости по существу определяется изменением величины d от dmax до dmin. Так как в описанной конструкции структуры с переменной емкостью максимальная величина емкости Сmax определяется по существу толщиной диэлектрических пленок 2 (что соответствует dmin), а минимальная емкость Cmin - величиной dmax, диапазон изменения емкости по существу определяется соотношением dmax/dmin (dmax>>dmin). Таким образом, указанная структура с переменной емкостью позволяет получить большой диапазон изменения емкости.
В зависимости от вариантов выполнения участков 4 (см. фиг. 1) непосредственного соединения диэлектрических пленок 2 (см. фиг. 5-7) в каждом конкретном варианте выполнения структуры величина dmax может меняться, возрастая в вариантах, показанных на фиг. 6 и 7.
Для повышения технологичности структуры с переменной емкостью предпочтителен вариант, представленный на фиг. 8, в котором, однако, за счет малого изменения величины d на периферийных участках, расположенных вне ячеек 6, диапазон изменения емкости может быть несколько ниже, чем у варианта, представленного на фиг. 1.
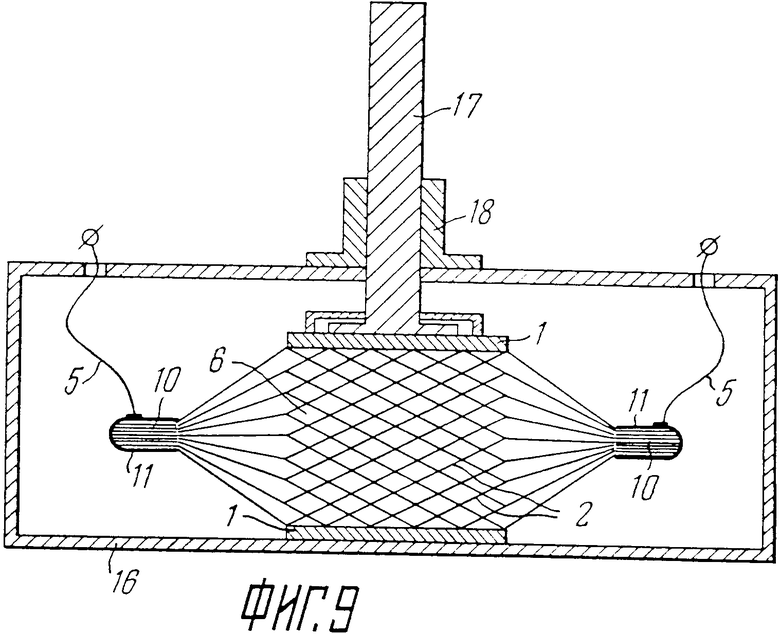
Датчик линейного перемещения объектов содержит корпус 16, в котором установлена структура с переменной емкостью, выполненная аналогично структуре, показанной на фиг. 1-8. Указанная структура использована в качестве емкостного чувствительного элемента, изменение емкости которого пропорционально линейному перемещению объекта. При этом одна пластина 1 (см. фиг. 9) структуры жестко связана с корпусом 16, а другая пластина 1 предназначена для соединения с объектом. Для этого в описываемом варианте датчика эта пластина 1 соединена с штоком 17, перемещающимся по направляющей, выполненной в виде втулки 18, закрепленной на корпусе 16.
Датчик линейного перемещения объектов работает следующим образом.
При линейном перемещении объекта это перемещение передается через шток 17 на соединенную с ним пластину 1 структуры с переменной емкостью. В результате этого изменяется усредненное расстояние d между токопроводящими покрытиями 3 соседних диэлектрических пленок 2 (см. фиг. 9), что приводит к изменению емкости С структуры. При этом информация об изменении емкости снимается с выводов 5.
Описанный датчик линейного перемещения позволяет измерять большие линейные перемещения в результате того, что dmax>>dmin, а за счет большого диапазона изменения емкости С структуры датчик обладает большой чувствительностью.
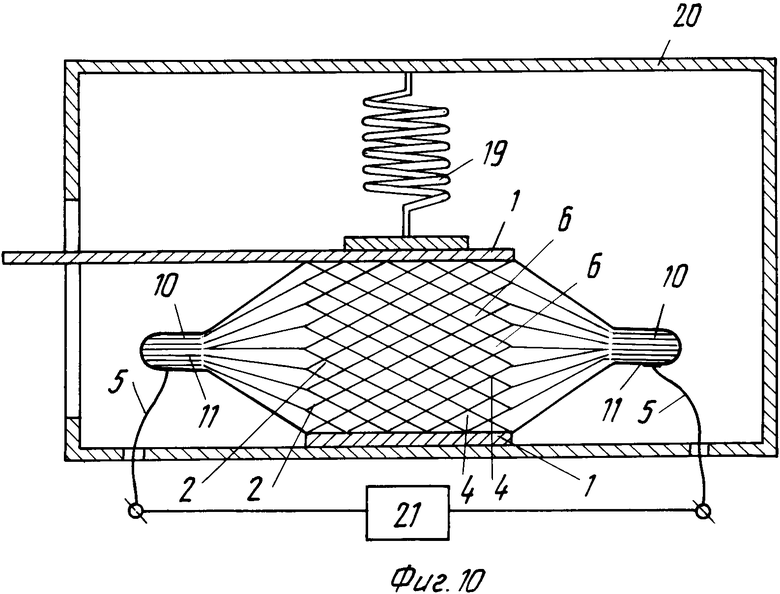
Электростатический двигатель для линейного перемещения объектов содержит структуру с переменной емкостью, аналогичную структуре, показанной на фиг. 1-8. Выводы 5 (см. фиг. 10) структуры предназначены для подвода питающего напряжения, а коллекторы выполнены в виде подвижной и неподвижной пластин 1, предназначенных для соединения с объектом. При этом подвижная пластина 1 перемещается из исходного положения на величину рабочего хода электростатического двигателя.
Электростатический двигатель снабжен также средством 19 возврата подвижной пластины структуры с переменной емкостью в исходное положение. В описываемом варианте средство 19 возврата выполнено в виде пружины.
Как показано на фиг. 10, в электростатическом двигателе предусмотрен корпус 20, в котором установлена структура с переменной емкостью и пружина, одним концом жестко связанная с корпусом 20, а другим - с подвижной пластиной 1. Неподвижная пластина 1 жестко связана с корпусом 20.
Возможен вариант электростатического двигателя, в котором корпусом 20 служит корпус объекта (нагрузки), с которым связаны пружина и неподвижная пластина 1.
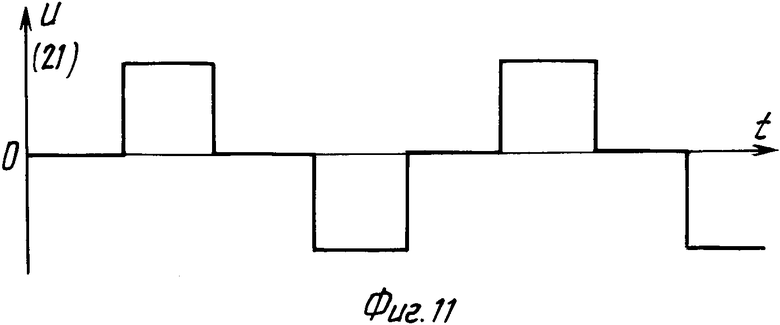
При использовании в структуре с переменной емкостью диэлектрических пленок 2 из полиэтилентерефталата при напряженности электрического поля, возникающего между диэлектрической пленкой 2 и токопроводящим покрытием 3 (см. фиг. 2) соседней диэлектрической пленки 2 (см. фиг. 10), превышающего 106 В/м, на поверхности каждой из этих диэлектрических пленок 2 образуется поверхностный гомозаряд, приводящий к уменьшению напряженности электрического поля. Вследствие того, что возникновение поверхностного гомозаряда происходит в течение времени релаксации, характерном для полиэтилентерефталата, необходимо менять полярность питающего напряжения от момента его подачи в интервале времени, не превышающем время релаксации. Для этого к выводам 5 структуры с переменной емкостью подключен генератор 21 чередующихся разнополярных импульсов питающего напряжения с паузами между импульсами, причем длительность генерируемых импульсов не превышает время релаксации материала диэлектрических пленок 2 структуры с переменной емкостью. На фиг. 11 представлена временная диаграмма напряжения U на выходе генератора 21.
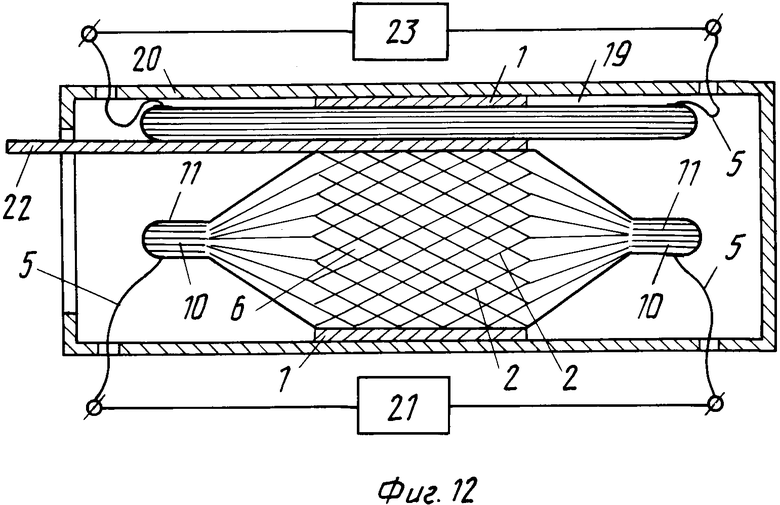
Как показано на фиг. 12, средство 19 возврата подвижной пластины структуры с переменной емкостью в исходное положение выполнено в виде аналогичной первой структуре второй структуры с переменной емкостью, управляемой посредством питающего напряжения в противофазе по отношению к первой структуре с переменной емкостью. При этом обе структуры связаны между собой посредством общей подвижной пластины 22, которая в описываемом варианте предназначена для соединения с объектом, а неподвижные пластины 1 жестко связаны с корпусом 20.
Возможен другой вариант электростатического двигателя, в котором корпусом 20 служит корпус объекта (нагрузки), с которым соединены неподвижные пластины 1 структур с переменной емкостью.
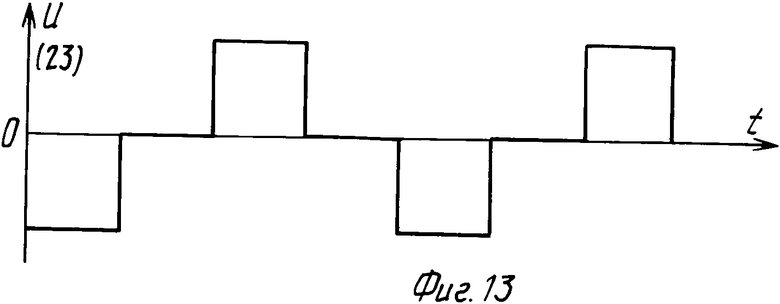
К выводам 5 второй структуры с переменной емкостью подключен генератор 23 чередующихся разнополярных импульсов питающего напряжения с паузами между импульсами, генерирующий импульсы, аналогичные импульсам генератора 21. При этом на структуры одновременно поступают импульсы в противофазе по модулю, как это видно из временной диаграммы напряжения U на выходе генератора 23, показанной на фиг. 13.
Электростатический двигатель для линейного перемещения объектов работает следующим образом.
В исходном состоянии усредненное расстояние d между токопроводящими покрытиями 3 (см. фмг. 2) соседних диэлектрических пленок 2 (см. фиг. 10) имеет максимальное значение (dmax). Вместе с тем, диэлектрические пленки 2 имеют участки 4 непосредственного соединения соседних диэлектрических пленок. При подаче питающего напряжения на токопроводящие покрытия 3 (см. фмг. 2) на участках 4 (см. фиг. 10) непосредственного соединения и вблизи этих участков 4 появляются максимальные электростатические силы, обусловленные минимальным расстоянием между токопроводящими покрытиями 3 (см. фиг. 2) соседних диэлектрических пленок 2, вызывающие взаимодействие соседних диэлектрических пленок 2 в виде наката одной на другую. В результате этого происходит процесс смыкания ячеек 6 (см. фиг. 3) противоположными поверхностями в направлении от участков 4 (см. фиг. 10) непосредственного соединения к центральной части ячеек 6. Таким образом, происходит слипание соседних диэлектрических пленок 2 по всей площади. При этом электростатический двигатель перемещает объект из исходного положения на величину рабочего хода.
Для возврата электростатического двигателя в исходное положение питающее напряжение снимается и средство 19 возврата - пружина возвращает подвижную пластину 1 в исходное положение.
Для более полного использования возможностей электростатического двигателя средство 19 возврата выполнено в виде аналогичной первой второй структуры с переменной емкостью, срабатывающей в противофазе с первой структурой, как показано на фиг. 12. В результате этого одна структура совершает рабочий ход в одном направлении, а другая структура - в противоположном направлении.
Описанный электростатический двигатель характеризуется высоким коэффициентом Кm электромеханического преобразования, определяемым выражением
Km=(Cmax-Cmin)/Cmax 1. (2)
Кроме того, за счет большого значения Сmax описанный электростатический двигатель характеризуется большой удельной запасенной энергией.
В исходном положении электростатического двигателя за счет участков 4 непосредственного соединения обеспечивается большая напряженность электрического поля даже при относительно низком питающем напряжении, что обуславливает высокую чувствительность электростатического двигателя к питающему напряжению.
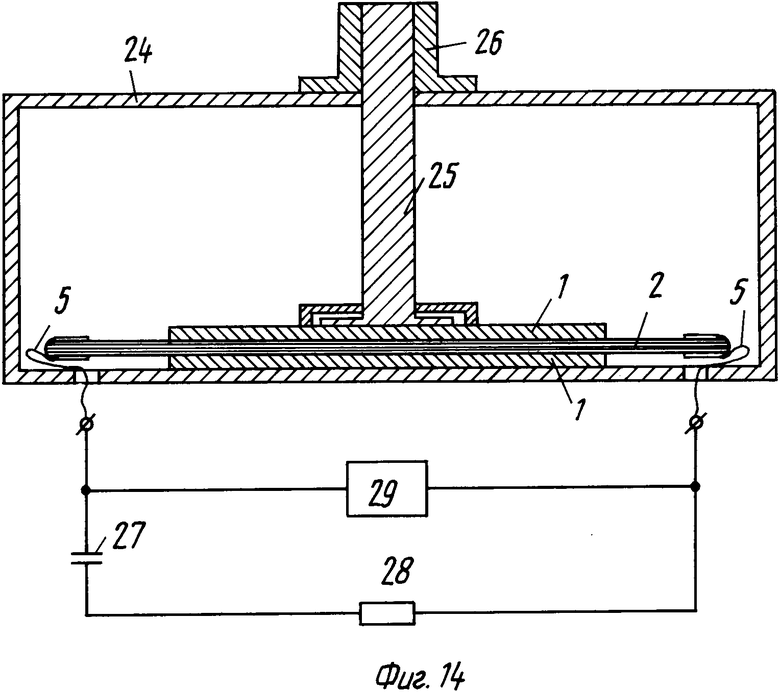
Электростатический генератор содержит корпус 24 (фиг. 14), в котором установлена структура с переменной емкостью, аналогичная структуре, показанной на фиг. 1-8. Выводы 5 структуры предназначены для подвода питающего напряжения - съема электрической энергии. Одна пластина 1 структуры жестко связана с корпусом 24, а другая пластина 1 - с приводом 25 возвратно-поступательного перемещения, в описываемом варианте выполненным в виде штока, соединенного с источником колебаний. Шток перемещается по направляющей, выполненной в виде втулки 26, закрепленной на корпусе 24. Для съема электрической энергии в описываемом варианте предусмотрены разделительный конденсатор 27 и резистор 28, последовательно соединенные между собой и подключенные к выводам 5.
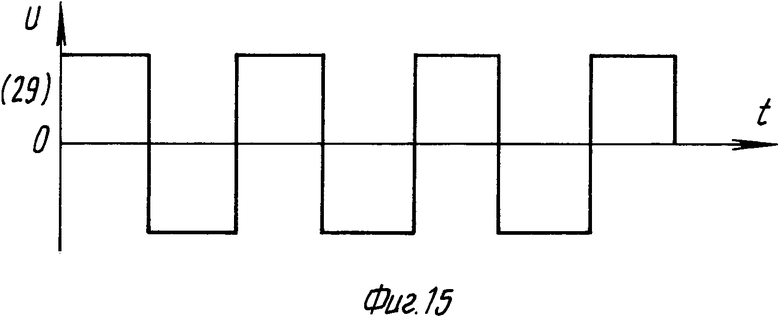
К выводам 5 структуры с переменной емкостью подключен генератор 29 чередующихся разнополярных импульсов питающего напряжения, длительность которых не превышает время релаксации материала диэлектрических пленок 2 структуры. На фиг. 15 показана временная диаграмма напряжения U на выходе генератора 29. В описываемом варианте внутреннее сопротивление генератора 29 (см. фиг. 14) должно быть много больше сопротивления резистора 28.
Электростатический генератор работает следующим образом.
К структуре с переменной емкостью прикладывается питающее напряжение от генератора 29, под действием которого структура перемещается в крайнее положение, соответствующее максимальной емкости. При этом привод 25 возвратно-поступательного перемещения осуществляет перемещение пластины 1 структуры в направлении, противоположном направлению действия сил электростатического притяжения соседних диэлектрических пленок 2. В результате этого происходит генерация зарядов с выводов 5 структуры в нагрузку (резистор 28) через разделительный конденсатор 27.
Описанный электростатический генератор характеризуется высокой удельной мощностью, определяемой высоким коэффициентом Кmэлектромеханического преобразования.
Таким образом, предлагаемая структура с переменной емкостью характеризуется большим диапазоном изменения емкости, обеспечивая объектам, использующим ее в качестве исполнительного механизма, ряд существенных преимуществ, расширяющих область их применения. К таким преимуществам относятся высокая чувствительность и большой диапазон измеряемых линейных перемещений у датчика линейного перемещения объектов, большая удельная запасенная энергия и высокая чувствительность к прикладываемому напряжению у электростатического двигателя и высокая удельная мощность у электростатического генератора.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЕМКОСТНЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2006 |
|
RU2306662C1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА ЕМКОСТНАЯ (ЭМЕ) ПЛАНАРНОГО ТИПА | 2016 |
|
RU2640194C1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА ЕМКОСТНАЯ (ЭМЕ) С ЯЧЕЙКАМИ ВНУТРЕННЕГО СЖАТИЯ | 2016 |
|
RU2672099C2 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА ЕМКОСТНАЯ (ЭМЕ) С НАТЯЖНЫМИ ЭЛЕКТРОДАМИ | 2016 |
|
RU2663499C2 |
| Электростатический преобразователь | 2021 |
|
RU2797442C2 |
| Способ рентгеновской томографии и рентгеновский томограф для его осуществления | 1983 |
|
SU1119438A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ПЛЕНОЧНОГО ЭЛЕКТРОНАГРЕВАТЕЛЯ (ВАРИАНТЫ) | 2009 |
|
RU2394398C1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ПРИВОД | 2011 |
|
RU2488214C2 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ МИКРО-, НАНОДВИГАТЕЛЬ | 2008 |
|
RU2374746C1 |
| ЭЛЕКТРОХРОМНОЕ УСТРОЙСТВО С ПЕРЕМЕННЫМ ПРОПУСКАНИЕМ (ОТРАЖЕНИЕМ) СВЕТА И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ | 2001 |
|
RU2216757C2 |
Использование: в радиоэлектронике, автоматике и т.п. в качестве конденсатора, привода или генератора электрической энергии. Сущность изобретения: структура с переменной емкостью имеет две пластины, между которыми расположено множество диэлектрических пленок с токопроводящими покрытиями, обращенными в сторону одной пластины. Соседние пленки непосредственно соединены между собой на участках непосредственного соединения, расположенных с постоянным шагом, причем для последующих соседних пленок эти участки смещены на половину шага, образуя ячеистую структуру, ячейки которой способны изменять свою конфигурацию при перемещении пленок из одного крайнего положения в другое в направлении, перпендикулярном поверхностям пластин, с которыми связаны крайние пленки. В крайнем положении, соответствующем максимальной емкости, ячейки смыкаются противоположными в направлении перемещения поверхностями по всей их площади, а в крайнем положении, соответствующем минимальной емкости, между противоположными поверхностями ячеек образуется зазор переменной величины, имеющей минимальное значение вблизи участков непосредственного соединения. 3 з.п. ф-лы, 15 ил.
| Электростатический двигатель с возвратно-поступательным движением | 1978 |
|
SU744877A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
