Изобретение относится к транспортному машиностроению, в частности к способам и устройствам для повышения устойчивости транспортных средств.
Одним из аналогов является способ управления транспортным средством путем смещения масс полезного груза и транспортного средства без полезного груза относительно положения безразличного равновесия центра тяжести транспортного средства с устройством для реализации данного способа, содержащим раму, состоящую из шарнирно соединенных звеньев, и грузовые платформы.
Особенностью способа является то, что массы полезного груза и транспортного средства без полезного груза располагают по одну сторону относительно области положений безразличного равновесия центра тяжести транспортного средства и смещают относительно нее в одном направлении. При этом оценивают положение масс по расположению центров тяжести полезного груза и транспортного средства без полезного груза.
Недостаток способа заключается в том, что массы располагают относительно области положений безразличного равновесия центра тяжести транспортного средства в направлении, противоположном направлению действия силы тяжести, и смещают в одном направлении. Такое размещение масс приводит к тому, что центр тяжести транспортного средства оказывается расположенным относительно своего положения безразличного равновесия также в направлении, противоположном направлению действия силы тяжести, то есть в положении неустойчивого равновесия. Это означает, что при любом, сколь угодно малом, отклонении его от положения равновесия возникает момент силы тяжести, увеличивающий это отклонение. В то же время, одностороннее смещение масс приводит неизбежно к подобным отклонениям, чреватым опрокидыванием транспортного средства. Поэтому при управлении транспортным средством таким способом необходимо своевременное создание моментов сторонних сил, уравновешивающих опрокидывающий момент силы тяжести, иначе говоря, требуется поддержка равновесия. Следовательно, способ не обеспечивает высокой устойчивости транспортного средства.
Особенностью устройства для реализации способа является то, что рама жестко связана с грузовой платформой и состоит из двух продольно расположенных звеньев, соединенных поворотной осью, расположенной продольно в горизонтальной плоскости. Заднее звено имеет жесткую связь в поперечном направлении с боковыми опорными элементами транспортного средства.
Недостаток устройства состоит в том, что жесткое соединение грузовой платформы с рамой не обеспечивает устойчивости шарнирной конструкции. Для управления транспортным средством с помощью такого устройства необходима поддержка равновесия, которая осуществляется рулевым управлением, в ущерб маневренности. Управление транспортным средством усложнено. Другой недостаток устройства - жесткая поперечная связь рамы с боковыми опорными элементами, из-за которой имеют место боковые нагрузки, понижающие рабочий ресурс транспортного средства. Следовательно, устройство не позволяет достичь высокой устойчивости и маневренности, повысить ресурс транспортного средства, добиться простоты управления.
Другой аналог-способ управления транспортным средством путем смещения масс полезного груза и транспортного средства без полезного груза относительно положения безразличного равновесия центра тяжести транспортного средства с устройством, содержащим раму, состоящую из шарнирно соединенных звеньев, и грузовые платформы.
Управление транспортным средством осуществляется тем же способом, что и в рассмотренном выше аналоге.
Устройство для реализации способа имеет следующие особенности. Рама жестко связана с грузовой платформой и состоит из двух поперечно расположенных звеньев, соединенных шарнирами с продольной ориентацией осей, расположенных на одной горизонтальной прямой. Шарниры смещены относительно продольной оси транспортного средства таким образом, чтобы лишь один опорный элемент был подвержен боковым нагрузкам. Но объем нагрузок увеличен в силу имеющего место поперечного скольжения элемента.
Недостаток устройства заключается в том, что жесткое соединение рамы с грузовой платформой не может обеспечить устойчивости шарнирной конструкции без дополнительной поддержки равновесия. Применение для этой цели рулевого управления приводит к снижению маневренности, усложняет управление транспортным средством. Другой недостаток - наличие боковых нагрузок, снижающих ресурс конструкции.
Известные аналоги не позволяют достичь высокой устойчивости, маневренности, повысить рабочий ресурс, упростить управление транспортным средством.
Наиболее близким по технической сущности к предлагаемому способу и устройству для его осуществления является принятый в качестве прототипа способ управления транспортным средством путем смещения масс полезного груза и транспортного средства без полезного груза относительно положения безразличного равновесия центра тяжести транспортного средства с устройством для осуществления данного способа, содержащим раму, состоящую из шарнирно соединенных звеньев, и грузовые платформы.
Особенностью способа является то, что массы полезного груза и транспортного средства без полезного груза располагают по одну сторону относительно области положений безразличного равновесия центра тяжести транспортного средства и смещают относительно нее в одном направлении. При этом оценивают положение масс по расположению центров тяжести полезного груза и транспортного средства без полезного груза.
Недостаток способа состоит в том, что массы располагают относительно области положений безразличного равновесия центра тяжести транспортного средства в направлении, противоположном направлению действия силы тяжести, и смещают в одном направлении. Такое расположение масс приводит к тому, что центр тяжести транспортного средства оказывается расположенным относительно своего положения безразличного равновесия также в направлении, противоположном направлению действия силы тяжести, т.е. в положении неустойчивого равновесия. Это означает, что при любом, сколь угодно малом отклонении его от положения равновесия возникает момент силы тяжести, увеличивающий это отклонение. С другой стороны, однонаправленное смещение масс неизбежно приводит к подобным отклонениям, создающим условия для опрокидывания транспортного средства. Поэтому при управлении транспортным средством таким способом необходимо своевременное создание моментов сторонних сил, уравновешивающих опрокидывающий момент, - требуется поддержка равновесия. Следовательно, способ не обеспечивает высокой устойчивости транспортного средства.
Особенностью устройства для реализации способа является то, что рама жестко соединена с грузовой платформой и состоит из двух поперечно расположенных звеньев, соединенных жесткими тягами.
Недостаток устройства состоит в том, что жесткое соединение рамы с грузовой платформой не обеспечивает такой устойчивости шарнирной конструкции, которая не требовала бы дополнительной поддержки равновесия, была независимой. Использование для поддержки равновесия рулевого управления приводит к тому, что снижается маневренность и усложняется управление транспортным средством.
Следовательно, прототип не позволяет достичь высокой устойчивости и маневренности транспортного средства, простоты управления им.
Цель изобретения-способа - повышение устойчивости транспортного средства.
Поставленная цель достигается тем, что в известном способе управления транспортным средством путем смещения масс полезного груза и транспортного средства без полезного груза относительно положения безразличного равновесия центра тяжести транспортного средства указанные массы располагают противолежащими относительно области положений безразличного равновесия центра тяжести и смещают относительно нее в противоположных направлениях. Положение масс при этом оценивают по расположению центров тяжести полезного груза и транспортного средства без полезного груза. При этом для любого момента времени обязательно соблюдение соотношения: n Mia > mb где
Mia > mb где  Mi - сумма масс частей полезного гру- за;
Mi - сумма масс частей полезного гру- за;
n - количество частей полезного груза;
a и b - расстояния от центров тяжести, соответственно, полезного груза и транспортного средства без полезного груза до конкретной точки положения безразличного равновесия результирующего центра тяжести;
m - масса транспортного средства без полезного груза.
Таким образом, заявленный способ управления транспортным средством отличается от прототипа расположением масс полезного груза и транспортного средства без полезного груза противолежащими относительно области положений безразличного равновесия центра тяжести транспортного средства и смещением указанных масс относительно этой области в противоположных направлениях с соблюдением расчетного соотношения и соответствует критерию "новизна".
В известных технических решениях не обнаружены признаки, сходные с признаками, отличающими заявленный способ от прототипа. Следовательно, предлагаемый способ обладает существенными отличиями.
Цель изобретения-устройства, реализующего заявленный способ, - повышение устойчивости, маневренности транспортного средства, упрощение управления им.
Поставленная цель достигается тем, что в известном устройстве для управления транспортным средством, содержащем раму, состоящую из шарнирно соединенных звеньев, и грузовые платформы, рама снабжена цилиндрическими направляющими с поперечной ориентацией относительно боковых звеньев, на направляющие установлены опорные ролики рычагов с грузовыми платформами, соединенных жесткими тягами друг с другом и с боковыми звеньями рамы.
Таким образом, заявленное устройство для управления транспортным средством отличается от прототипа наличием у рамы цилиндрических направляющих с установленными на них опорными роликами рычагов с грузовыми платформами, соединенных жесткими тягами друг с другом и с боковыми звеньями рамы, и соответствует критерию "новизна".
В известных технических решениях не обнаружены признаки, сходные с признаками, отличающими заявленное устройство от прототипа, следовательно предлагаемое устройство обладает существенными отличиями.
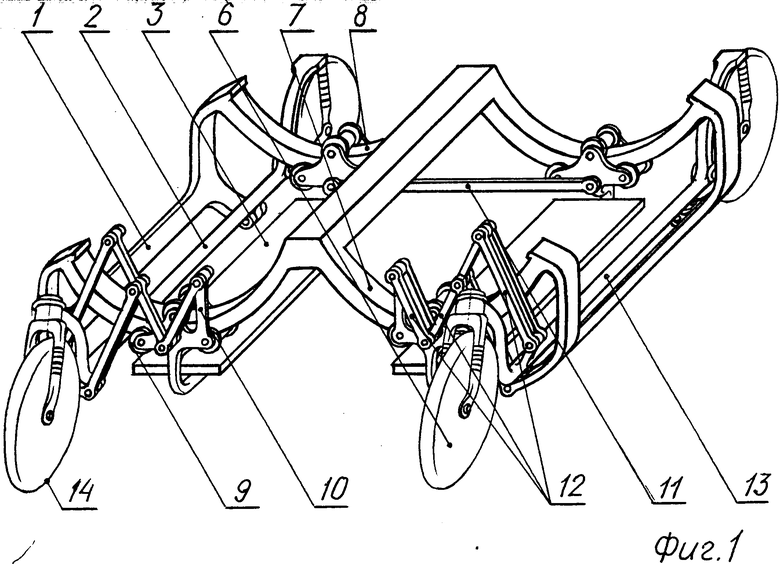
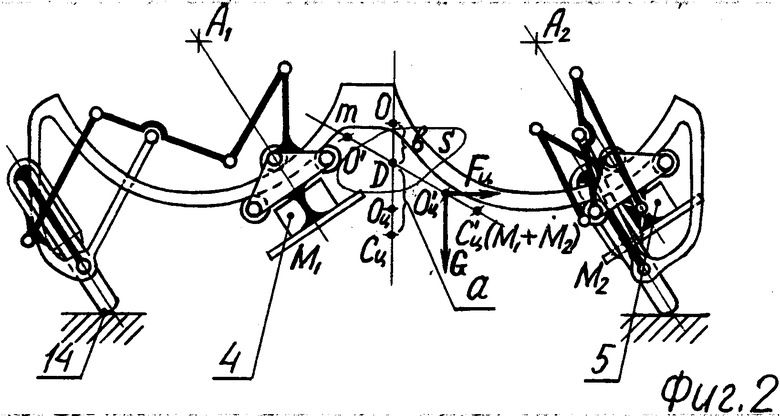
На фиг.1 изображено устройство, реализующее способ управления транспортным средством; на фиг.2 - схема устройства в действии.
Способ заключается в следующем. Части полезного груза 4 и 5 с массами М1 и М2 устанавливают на грузовые платформы 3 и, таким образом, центры тяжести полезного груза Сц и транспортного средства без полезного груза О располагают противолежащими относительно точки D положения безразличного равновесия центра тяжести транспортного средства Оц, получаемой при пересечении любых отрезков прямых, соединяющих точки одновременных положений центров тяжести Сц и О при их противоположном смещении относительно области положений безразличного равновесия, например ОСц и О'Cц'. Следовательно, массы полезного груза (М1+М2) и транспортного средства без полезного груза располагают противолежащими относительно области положений безразличного равновесия центра тяжести транспортного средства. Расположение центра тяжести Оц в точке своего безразличного равновесия D означало бы равновесие транспортного средства в любом положении и необходимость дополнительных средств для управления наклоном его элементов. Поэтому рычаги 10 регулируют по длине таким образом, чтобы добиться неравенства моментов силы тяжести, приложенной в точках Сц' и О, относительно точки D, в следующем соотношении:
(M1 + M2) g a > mgb, где g - ускорение свободного падения;
a - расстояние между точками Сц' и D;
b - расстояние между точками О и D;
m - масса транспортного средства без полезного груза. Отсюда выводится расчетное соотношение для множества частей полезного груза: Mia > mb где
Mia > mb где  Mi - сумма масс частей полезного гру- за.
Mi - сумма масс частей полезного гру- за.
При выполнении расчетного соотношения центр тяжести Оц занимает положение между точкой D и центром тяжести полезного груза Сц, соответствующее состоянию устойчивого равновесия. Под действием, например, центробежной силы Fц массы полезного груза (М1 + М2) и транспортного средства без полезного груза m смещают в противоположных направлениях относительно области положений безразличного равновесия S центра тяжести Оц перемещением их центров тяжести, соответственно, Сц и О в положения Сц' и О' с соблюдением расчетного соотношения. Результирующий центр тяжести Оц, принимая положения Оц' промежуточное между Сц' и D, стремится к возвращению в первоначальное положение вследствие возникающего при отклонении возвращающего момента силы тяжести G относительно точки D. Поэтому при ослаблении и прекращении действия центробежной силы Fц транспортное средство принимает первоначальное положение.
Таким образом, противолежащее относительно положения безразличного равновесия D области названных положений S центра тяжести транспортного средства Оц расположение масс полезного груза (М1 + + М2) и транспортного средства m при соблюдении расчетного соотношения приводит к тому, что центр тяжести Оц оказывается расположенным относительно своего положения безразличного равновесия D в направлении действия силы тяжести G. Это означает, что при любом, сколь угодно малом отклонении центра тяжести Оц от этого положения возникает момент силы тяжести, возвращающий его в первоначальное положение, т. е. имеет место состояние устойчивого равновесия. Смещения же масс (М1+М2) и m относительно области S в противоположных направлениях с соблюдением указанного соотношения приводит к тому, что стремление центра тяжести Оц занять первоначальное положение сохраняется в любой момент времени. Значит, способ обеспечивает сохранение устойчивости транспортного средства при отклонениях его центра тяжести от положения равновесия, а следовательно, повышение устойчивости транспортного средства по сравнению с прототипом.
Устройство содержит раму 1, шарнирно соединенные звенья 2, грузовые платформы 3, части полезного груза 4 и 5, опорные элементы транспортного средства 6, цилиндрические направляющие 7 и 8, опорные ролики 9, рычаги 10, жесткие тяги 11 и 12, боковые звенья 13, опорные поверхности опорных элементов 14. На фиг.2 обозначены область положений S и конкретная точка положения D безразличного равновесия центра тяжести транспортного средства, центры тяжести транспортного средства Оц, полезного груза Сц и транспортного средства без полезного груза О и их положения при смещении, соответственно, Оц', Сц', О', расстояния от центров тяжести полезного груза Сц и транспортного средства без полезного груза О до точки безразличного равновесия D, соответственно, a и b, массы частей полезного груза М1 и М2, масса полезного груза (М1+М2), масса транспортного средства без полезного груза m, векторы сил тяжести G и центробежной Fц, точки центров дуг цилиндрических направляющих А1 и А2.
Рама 1, состоящая из шарнирно связанных звеньев 2, снабжена цилиндрическими направляющими, поперечно ориентированными относительно ее боковых звеньев 7,8. На направляющие установлены опорные ролики 9 рычагов 10, жестко связанных с грузовыми платформами 3. Рычаги 10 соединены жесткой тягой 11 друг с другом и жесткими тягами 12 - с боковыми звеньями 13. Боковые звенья 13, опирающиеся на опорные элементы транспортного средства 6, соединены с рамой 1 шарнирно со стороны, ближайшей к опорной поверхности 14 опорного элемента 6. Центр тяжести транспортного средства Оц в любой момент времени расположен между центром тяжести полезного груза Сц и D - точкой безразличного равновесия. Положение центров цилиндрических направляющих А1 и А2выбирается в зависимости от желаемых технических характеристик транспортного средства.
Устройство работает следующим образом.
На грузовые платформы 3 устанавливают части полезного груза 4 и 5, например двигатель, кресла водителя и пассажиров, бак для горючего и т.п., и регулируют рычаги 10 по длине таким образом, чтобы достичь состояния устойчивого равновесия транспортного средства. Это состояние возможно благодаря относительной подвижности рамы 1 и грузовых платформ 3, что позволяет расположить центр тяжести транспортного средства Оцотносительно его положения безразличного равновесия D в направлении силы тяжести G. Под действием, например, центробежной силы Fц грузовые платформы 8 с частями полезного груза 4 и 5 смещаются в направлении действия силы Fц вместе с рычагами 10, которые перемещаются на опорных роликах 9 по цилиндрическим направляющим 7 и 8 рамы 1. Перемещение рычагов 10 приводит в движение жесткую тягу 11, обеспечивающую синхронность их перемещения, и жесткие тяги 12, передающие перемещение боковым звеньям 13. Боковые звенья 13 отклоняются относительно осей шарниров, соединяющих их с рамой 1, навстречу направлению действия центробежной силы Fц. При этом уменьшается боковая нагрузка на опорные элементы 6. По мере прекращения действия силы Fц все элементы конструкции под действием силы тяжести G приходят в первоначальное положение. Подвижное соединение грузовых платформ 3 с рамой 1 с помощью цилиндрических направляющих 7 и 8, рычагов 10 с опорными роликами 9 и жестких тяг 12 приводит к тому, что данная шарнирная конструкция, в отличие от прототипа, обладает независимой устойчивостью, сохраняется при любом взаимном положении звеньев 2. Теоретически, при равных условиях относительного расположения центра тяжести Оц воздействие одинаковой по величине центробежной силы обуславливает у прототипа меньший, с разницей до 6%, опрокидывающий момент, чем у заявленного устройства, - в силу уменьшения длины плеча силы Fц при наклоне конструкции прототипа. Однако в связи с тем, что управляемость прототипа прямо пропорциональна высоте его центра тяжести над опорной поверхностью и поэтому затруднена при низком положении центра тяжести, в то время как у заявленного устройства минимальная высота центра тяжести Оц ограничена лишь дорожным просветом под грузовыми платформами 3, изначальные условия не бывают равны: плечо приложения центробежной силы Fц в предлагаемой конструкции значительно меньше, а устойчивость существенно выше. Управление транспортным средством с помощью такого устройства не требует применения рулевого управления для поддержания равновесия, что позволяет повысить маневренность и упрощает управление транспортным средством. Следовательно, предлагаемое устройство обеспечивает повышение устойчивости и маневренности транспортного средства, упрощение управления им.
Например, при реализации предлагаемого способа изготовлены одноместные аэросани с педальным приводом, массой 14 кг. Высота точки D над дорогой составила 320 мм, расстояние b - 80 мм. Расстояние а составило 20 мм при массе водителя 71 кг и длине рычага 10 от точки центра цилиндрических дуг 7,8 до грузовой платформы 3, составляющей 460 мм. Потеря устойчивости аэросаней под действием центробежной силы наблюдалась в ходе испытаний при движении со скоростью 20 км/ч по дуге поворота радиусом менее 2,7 м - по наружному ребру внешней лыжи - при ширине колем 0,9 м, то есть при заведомом нарушении нормальных условий эксплуатации. Таким образом, эксперимент подтвердил высокую устойчивость транспортного средства.
Например, при реализации предлагаемого устройства в конструкции названных аэросаней применено соединение грузовой платформы (с сиденьем водителя и багажником) 3 с рамой 1 с помощью поперечно ориентированных цилиндрических направляющих 7 и 8, рычага 10 с опорными роликами 9 и жестких тяг 12. Благодаря этому подвижному соединению аэросани обладают независимой устойчивостью при посадке водителя или установке груза аналогичного веса на грузовую платформу 3. Рулевое управление (в виде одноопорного коленчатого вала с тросовым приводом на поворотную трапецию передних лыж) при этом применяется только для маневрирования и гашения незначительных поперечных колебаний, вследствие чего управление обеспечивает высокую маневренность саней и несложно.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕЛОРОЛЛЕР | 1992 |
|
RU2037448C1 |
| Двухзвенное гусеничное транспортное средство для перевозки длинномерных грузов | 2021 |
|
RU2765311C1 |
| МУЛЬТИКОПТЕР С ДВУХЪЯРУСНЫМ РАСПОЛОЖЕНИЕМ ВИНТОМОТОРНЫХ ГРУПП | 2021 |
|
RU2766284C1 |
| РУЧНАЯ ТЕЛЕЖКА | 1992 |
|
RU2022857C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2021 |
|
RU2778064C1 |
| Всесезонный тундроход | 2016 |
|
RU2628414C1 |
| СТЕНД УДАРНЫЙ МАЯТНИКОВЫЙ ДЛЯ ИСПЫТАНИЯ ЗАЩИТНЫХ УСТРОЙСТВ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2523728C1 |
| АМФИБИЙНОЕ СУДНО НА ВОЗДУШНОЙ ПОДУШКЕ | 2006 |
|
RU2349475C2 |
| Малогабаритное модульное транспортное средство | 2016 |
|
RU2657829C2 |
| Способ и устройство для определения расположения центра тяжести груженого железнодорожного вагона | 2021 |
|
RU2784784C1 |
Использование: для повышения устойчивости и маневренности транспортного средства, упрощения управления им. Сущность изобретения: массы полезного груза и транспортного средства без полезного груза располагают противолежащими относительно области положений безразличного равновесия центра тяжести транспортного средства и смещают относительно нее в противоположные стороны. Положение масс при этом оценивают по расположению центров тяжести полезного груза и транспортного средства без полезного груза. Рама снабжена цилиндрическими направляющими с поперечной ориентацией относительно боковых звеньев, на направляющие установлены опорные ролики рычагов с грузовыми платформами, соединенных жесткими тягами друг с другом и с боковыми звеньями рамы. 2 с.п. ф-лы, 2 ил.
 Mia > mb,
Mia > mb,
где  Mi - сумма масс частей полезного груза;
Mi - сумма масс частей полезного груза;
n - количество частей полезного груза;
a и b - расстояния от центров тяжести соответственно полезного груза и транспортного средства без полезного груза до конкретной точки положения безразличного равновесия результирующего центра тяжести;
m - масса транспортного средства без полезного груза.
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Патент ФРГ N 3711554, кл | |||
| Способ крашения тканей | 1922 |
|
SU62A1 |
