Изобретение относится к электротранспортным средствам и робототехнике, таким как электромобили и гироскутеры, а именно к динамически и автоматически стабилизируемому транспортному средству, включающему в себя механические элементы колес, платформы и корпуса, блок контроля на базе процессора и датчиков, и портативные электрические источники питания, а также способу управления заявленным транспортным средством, включающим в себя управление устойчивостью и балансировкой. ТС может быть использовано как персональный транспорт, такси, каршеринг, средство доставки товаров, платформа для роботехнических систем.
Важным трендом развития городских ТС является повсеместное внедрение электротранспорта - электромобилей, электробусов и т.п. При этом одним из главных сдерживающих факторов в развитии электротранспорта является низкая плотность энергии в сравнении с бензиновыми автомобилями. Литий-ионные батареи имеют энергетическую плотность в 250 Wh/kg, в то время как плотность бензина 2700 Wh/kg. Для обеспечения аналогичного бензиновому автомобилю запаса хода, электрические авто требуется делать с большой и дорогостоящей батареей (с учетом аналогичных параметров массы), что также отражается на маневренности, так как для высокой адаптивности к движению на скорости требуются значительные энергозатраты.
Известные индивидуальные транспортные средства (средства персональной мобильности) в большинстве своем представляют собой двух- или одноколесные безкузовные средства с человеческой или электротягой - велосипед, сигвей, гироскутер, самокат, моноколесо. Основными преимуществами таких ТС является маневренность, компактность, энергоэффективность, дешевизна. Эти факторы делают представленные ТС все более популярными среди городских жителей. Важно обратить внимание, что при движении балансировка (удерживание в равновесии ТС) производится телом человека самостоятельно. Это требует постоянной вовлеченности водителя, энергозатрат. Также данные вид балансировки обладает рядом дополнительных минусов:
- не позволяет делать грузоподьемность выше трети массы человека.
- не позволяет устанавливать кабину на ТС и противостоять погодным условиям, а также увеличивать безопасность.
- не позволяет управлять тс людям с сложностями в координации тела
- требует длительного обучения вождению и балансировке
Представленные минусы не позволяет выводить ТС на дороги общего пользования без серьёзных ограничений в управлении, также делают ТС малопригодными для использования в дождливую, снежную, холодную и жаркую погоду.
И наоборот - электромобили и электробусы имеют хорошую защиту от погодных условий и не требуют балансировки, однако требуют огромных энергозатрат и имеют минимальную маневренность.
Из уровня техники известно транспортное средство, содержащее переднюю ось с парой передних колес, имеющую ширину колеи, регулируемую между широкой колеей и узкой колеей, приводную заднюю ось с задним колесом, устройство управления шириной колеи, приспособленное менять ширину колеи передних колес и менять колесную базу между передней осью и задней осью так, что для широкой колеи передних колес колесная база длиннее, чем для узкой колеи передних колес, при этом транспортное средство содержит рулевое устройство, приспособленное управлять поворотом заднего колеса, когда передние колеса установлены на узкую колею, где передние колеса являются неповорачивающимися, когда установлены на узкую колею (RU 2570184 C2, кл. B60B 35/10, опубл. 10.12.2015). Технический результат аналога - повышение маневренности, однако исходя из чертежей очевидно, что такая сложная конструкция из осей и колей, которые меняют свое положение, недостаточно быстро адаптируется к изменению окружения и маневренность транспортного средства с меньшим количеством конструкций будет значительно выше на любых скоростях.
Задача, которую решал автор - создать транспортное средство, которым можно легко и стабильно управлять на любых скоростях, используя преимущества двухколесных средств индивидуальной мобильности, а также защищенность от внешних условий, безопасность и принципы управления от классических автомобилей, при этом следуя тренду использовать электромоторы в качестве двигателя.
Технический результат, обеспечиваемый изобретением - повышение маневренности транспортного средства. Под маневренностью для цели настоящей заявки понимается легкость управления транспортным средством и контроля его поведения как на низких, так и на высоких скоростях, при движении прямолинейно или криволинейно по ровной поверхности, а также по поверхности с неровностями, при подъеме или спуске.
Указанный результат достигается благодаря совокупному эффекту от физического снижения массы транспортного средства относительно обыкновенных автомобилей, а также конструктивного оснащения двухколесного транспортного средства одноосным расположением колес с возможностью их вращения и автоматического смещения центра тяжести путем перемещения кабины вдоль оси X с помощью линейного актуатора, и от того, что посредством моторов, колëс с приводом или мотор-колëс изменяют угловую скорость указанных колес, обеспечивая изменение центра тяжести относительно точки опоры транспортного средства на плоскость и изменение линейной скорости транспортного средства, причем указанные действия происходят независимо от водителя, автоматически при считывании показателей телеметрии с датчиков и обработки этих данных микропроцессором в блоке управления.
Кроме того, указанный результат достигается при осуществлении заявленного способа.
Краткое описание чертежей.
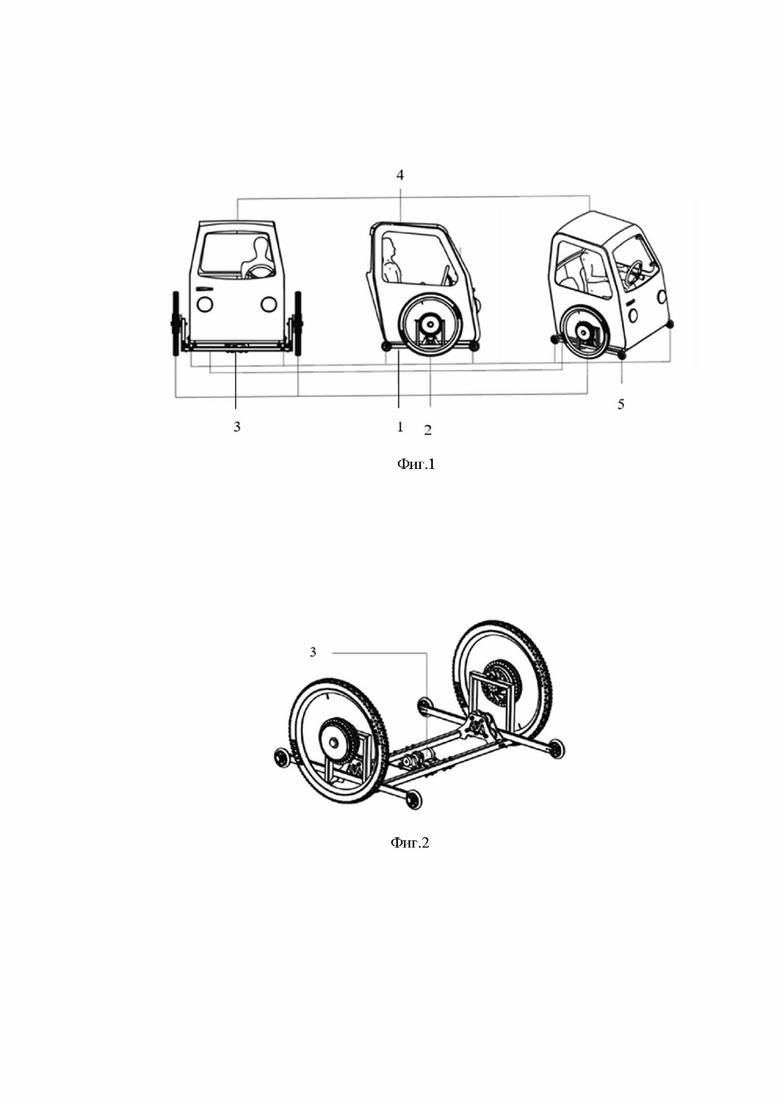
На фиг. 1 представлено транспортное средство с одноосным расположением колес с разных ракурсов, где:
1 - платформа;
2 - мотор-колëса либо колëса с приводом;
3 - линейный актуатор;
4 - кабина;
5 - опорные колëса.
На фиг. 2 представлена схема платформы транспортного средства.
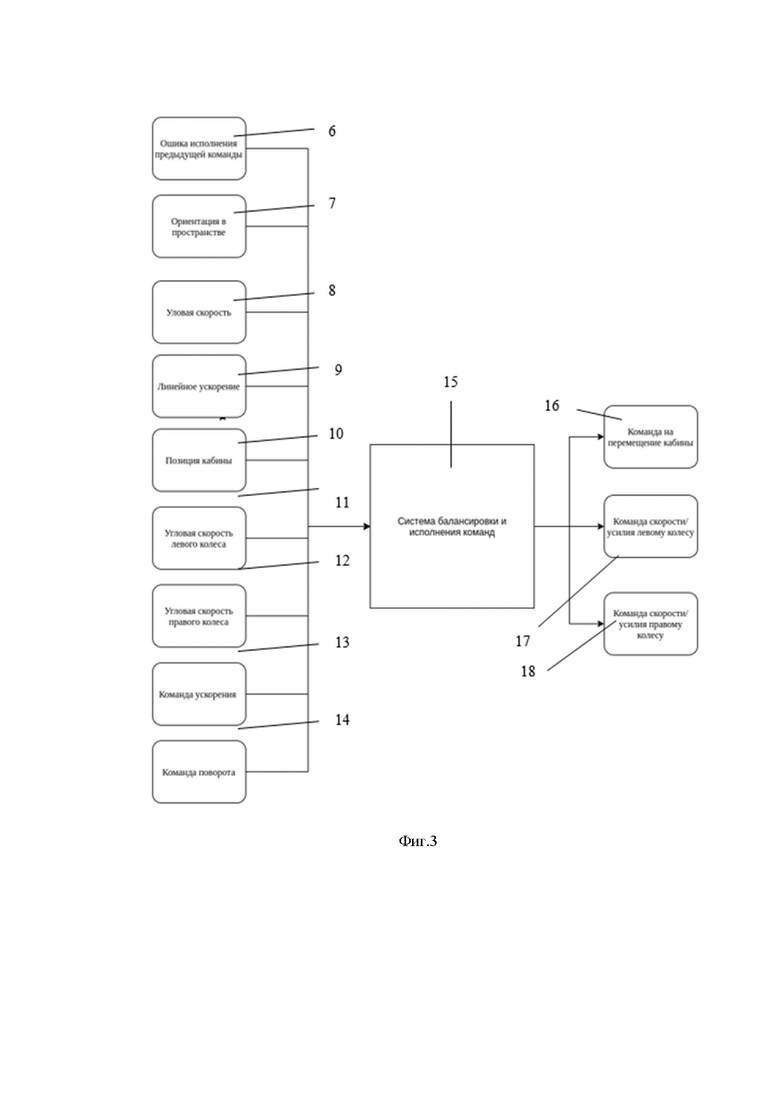
На фиг. 3 отображена схема блока управления транспортным средством.
6 - ошибка исполнения предыдущей команды;
7 - ориентация в пространстве;
8 - угловая скорость;
9 - линейное ускорение;
10 - позиция кабины;
11 - угловая скорость левого колеса;
12 - угловая скорость правого колеса;
13 - команда ускорения;
14 - команда поворота;
15 - блок балансировки и исполнения команд;
16 - команда на перемещение кабины;
17 - команда скорости/усилия левому колесу;
18 - команда скорости/усилия правому колесу.
На фиг. 4 изображена физическая модель балансировки транспортного средства.
На фиг. 5 представлен алгоритм управления показателями транспортного средства.
19 - цель;
20 - план;
21 - реализация плана;
23 - оценка результата;
23 - механизм обратной связи.
Ссылаясь на фиг. 1-2, в предпочтительном варианте осуществления изобретения транспортное средство состоит из кабины 4 и несущей платформы 1, под которой расположен по меньшей мере один линейный актуатор 3, двух основных колес 2, таких как мотор-колеса либо колеса с приводом, рамы, причем колеса выполнены с возможностью осуществления прямолинейного либо криволинейного движения транспортного средства с ускорением либо без ускорения, и установлены с противоположных сторон платформы параллельно друг другу посредством жесткого соединения с рамой либо с помощью амортизаторов или рессор. Кабина 4 соединена с линейным актуатором 3 и имеет четыре дополнительных опорных колеса 5. Линейный актуатор 3, являющийся конструктивным элементом транспортного средства, предназначен для перемещения кабины 4 по оси Х (вперед и назад) относительно платформы 1. При этом для повышения маневренности важно, чтобы перемещение кабины было плавным, для чего используется векторное управление моторами, линейными актуаторами, использования двигателей, например шаговых, как средств высокоточных линейных перемещений грузов. При этом кабина 4, предназначенная для размещения водителя, пассажиров и/или грузов, защищена от внешних условий. ТС содержит по меньшей мере один двигатель и блок управления транспортным средством (фиг.3), состоящий из руля, педали газа, педали тормоза, панели управления, микропроцессора, блока балансировки и исполнения команд 15 и датчиков, при этом датчиками являются гироскоп, акселерометр, магнетометр, датчик положения кабины и экодер углового положения основных колес 2. Опорные колëса 5 для обеспечения устойчивости транспортного средства в стоячем положении или для применения при экстренном торможении могут быть закреплены на кабине. Кроме того, за счет линейного актуатора транспортное средство выполнено с возможностью выполнения экстренного выкидывания. Центральный микропроцессор, выполнен с возможностью получения данных с датчиков и органов управления, а также обеспечения расчёта и отправки команд на мотор-колëса или колëса с приводом линейным актуатором. Центральный микропроцессор размещен внутри кабины на приборной панели и выполнен в виде сенсорного монитора. При этом блок балансировки и исполнения команд 15 размещен внутри кабины на приборной панели.
Транспортное средство содержит источник питания, предназначенный для подачи электроэнергии на все компоненты транспортного средства. Источник питания выполнен в виде, по меньшей мере, одной батареи, которая выполнена с возможностью ее быстрого снятия для зарядки вне транспортного средства. Внутри кабины транспортного средства под приборной панелью расположен разъем для зарядки батарей. Транспортное средство содержит датчики, выполненные с возможностью обеспечения определения положения транспортного средства в пространстве и одометрию движущихся элементов.
Транспортное средство может быть оснащено электрозамками на двери, омывателям лобового стекла, дворниками - очистителями лобового стекла, звуковым сигнализатором, аудиосистемой, монитором для отображения оперативных и статистических показателей транспортного средства. При этом монитор может быть выполнен с возможностью работы посредством сенсорного прикосновения. Кроме того, транспортное средство оснащено передними фарами головного освещения с функциями стояночного света, ближнего и дальнего света, расположенными в нижней части передней панели кабины. При этом задние стояночные сигнализаторы и стоп-сигнализаторы расположены в нижней части задней панели кабины. Кроме того, транспортное средство оснащено передними и задними сигнализаторами поворотников, расположенными на нижних частях передней и задней панели кабины соответственно. Транспортное средство оснащено центральным электромеханическим замком двери и системой вентиляции, воздушного охлаждения или отопления салона. Поворот транспортное средство совершает путем вращения мотор-колëс или колëс с приводом, которые имеют разную скорость вращения.
В частном случае 1, в качестве двигателя ТС используется шаговый электродвигатель.
В частном случае 2, на кабине либо несущей платформе ТС расположены дополнительные опорные колеса, оснащенные тормозами.
В частном случае 3, ТС оборудовано дополнительными датчиками, а именно датчиком глобального позиционирования GNSS/GPS/GLONASS, камерами кругового обзора, 3D лидаром.
Кабина и рама ТС исполнены из легких материалов высокой прочности с поперечными сечениями и формами, обеспечивающими достаточную прочность и жесткость. Типовые материалы включают, но без ограничения, композитные армированные полимеры, такие как пластики, графитопластиковые материалы и алюминий . Это позволяет обеспечивать малый вес кабины и всего ТС для обеспечения высокой энергоэффективности и маневренности передвижения.
Ссылаясь на фиг. 3-5, способ управления транспортным средством по п.1, включающий в себя выполнение следующей последовательности этапов
- в стояночном положении транспортное средство ожидает в состоянии устойчивого равновесия, опираясь на передние опорные колеса,
- водитель и пассажир заходят в кабину через дверь,
- переключают транспортное средство в режим движения
- транспортное средство перемещает кабину до ее положения параллельного земле, и переходит в состояние неустойчивого равновесия,
- в процессе движения водитель только управляет транспортным средством при помощи привычных для него органов управления - руля, педалей газа и тормоза, переключателя направления движения, а транспортное средство непрерывно обеспечивает положение кабины параллельное земле, основываясь на постоянном анализе данных, которые центральный микропроцессор блока управления получает от датчиков гироскопа, акселерометра, магнетометра, датчика положения кабины с помощью микропроцессора, который включает систему обратного маятника, а также
- при необходимости ТС изменяет положение кабины и угловые скорости колес, перемещение кабины транспортного средства вперед или назад относительно оси мотор-колëс или колëс с приводом транспортного средства осуществляют посредством линейного актуатора,
- при завершении движения водитель переводит ТС в состояние стоянки,
- кабина перемещается вперед до опоры на опорные колеса и перехода в состояние устойчивого равновесия.
При осуществлении способа транспортное средство может находиться в состоянии - стоянка. При этом кабина 4 транспортного средства перемещается вперед, и транспортное средство переходит в состояние устойчивого равновесия с помощью опоры на передние опорные колеса 5. В данном положении транспортное средство находится в выключенном состоянии.
Так, в стояночном положении транспортное средство находится в состоянии устойчивого равновесия, опираясь на передние опорные колеса 5. Затем водитель и пассажир заходят в кабину с помощью передней двери. Водитель осуществляет переключение транспортного средства в режим движения, что позволяет перемещать кабину до того положения, когда кабина перейдет в положение, параллельно земле, а все транспортное средство перейдет в состояние неустойчивого равновесия.
Транспортное средство приводят в движение следующим образом.
Транспортное средство может находиться в состоянии движения. При этом кабина 4 транспортного средства находится в положении параллельно уровню земли. Угловая скорость колëс изменяется в соответствии с командами водителя. Балансировка производится с помощью перемещения кабины 4, а также изменения угловой скорости мотор-колëс или колëс с приводом 2. Движение вперед транспортного средства выполняют путем вращения обоих мотор-колëс или колëс с приводом 2, вращающихся с одинаковой скоростью в направлении вперед. Движение назад транспортного средства выполняют путем вращения обоих мотор-колëс или колëс с приводом 2, вращающихся с одинаковой скоростью в направлении назад.
Разница указанных скоростей может влиять на величину радиуса поворота.
Вращение обоих мотор-колëс или колëс с приводом 2 в одинаковом направлении, при котором одно мотор-колесо или колесо с приводом вращается значительно быстрее другого мотор-колеса или колеса с приводом, приводит к дугообразному повороту.
Вращение только одного мотор-колеса или колеса с приводом заставляет транспортное средство, по существу, разворачиваться вокруг невращающегося колеса.
Вращение мотор-колëс или колëс с приводом 2 в противоположных направлениях с равными скоростями разворачивает транспортное средство вокруг вертикальной оси посередине между колесами.
Следующим состоянием транспортного средства может быть - остановка. При этом кабина 4 транспортного средства находится в положении параллельно уровню земли. Угловая скорость колëс стремится к нулю. Положение транспортного средства в пространстве стремится оставаться неизменным. Балансировка производится с помощью перемещения кабины 4.
При завершении движения водитель переводит транспортное средство в режим стоянки, кабина 4 перемещается вперед до опоры на опорные колеса 5 и перехода в состояние устойчивого равновесия.
В случае критического ускорения транспортного средства или резкого торможения, при которых балансировка транспортного средства кабиной невозможна, транспортное средство опирается на передние или задние опорные колëса 5.
Управление транспортным средством, а именно, балансировку транспортного средства осуществляют следующим образом.
Блок управления транспортным средством, схема которой представлена на фиг. 3, через систему балансировки и исполнения команд 15, поддерживает устойчивость транспортного средства, с учетом ошибки исполнения предыдущей команды 6, непрерывно отслеживая ориентацию транспортного средства в пространстве 7, угловую скорость 8, линейное ускорение 9, положение (позицию) кабины 10, угловую скорость вращения левого колеса 11, угловую скорость вращения правого колеса 12, команду ускорения 13, команду поворота 14, определяя корректирующие действия для поддержания устойчивости, и направляя команду 16 линейному актуатору на перемещение кабины и команды скорости/усилия 17 и 18 левому и правому мотор-колëсам на выполнение корректирующих действий.
В компьютерной системе центральный микропроцессор получает показатели датчиков, таких как, гироскоп, акселерометр, магнетометр, датчик положения кабины и на основании встроенных алгоритмов обеспечивает изменения положения кабины с помощью линейного актуатора 3 и угловой скорости мотор-колëс или колëс с приводом 2 в целях или балансировки транспортного средства, то есть удержания его параллельным относительно оси X, или исполнения команд управления.
Транспортное средство может управляться водителем, находящимся в кабине с помощью таких органов управления, как руль, педаль газа, педаль тормоза, кнопками переключения направления движения, кнопками включения транспортного средства. Органы управления транспортным средством, расположенные в кабине на приборной панели транспортного средства, представляют собой набор датчиков и электромоторов, таких каких, как датчик угла поворота для руля.
При этом руль транспортного средства может также содержать в себе электромотор для физического дублирования (отображения) команд, получаемых при дистанционном или автономном управлении транспортным средством. Кроме того, транспортное средство оснащено датчиками уровня нажатия педалей газа и тормоза. Наряду с вышесказанным, транспортное средство имеет удаленную систему блока управления, включающую джойстик удаленного управления, который позволяет управлять транспортным средством на расстоянии менее 100 м, а также пульт удаленного управления, позволяющий управлять транспортным средством на расстояниях более 100 м.
Кроме того, транспортное средство может работать автономно, при подключении к системам автономного управления без вмешательства или с вмешательством водителя.
Мотор-колëса или колëса с приводом 2 имеют электромоторы и драйверы, и могут быть выполнены любого размера, но оптимально применять колеса бóльшего диаметра.
Большее пятно контакта с поверхностью, как следствие большую площадь опоры и большую устойчивость, поскольку тело, имеющее большую площадь опоры, будет находиться в равновесии до тех пор, пока линия действия центра тяжести будет проходить через площадь опоры.
Кроме того, указанный диаметр мотор-колëс и колëс с приводом 2 увеличивает силу трения качения.
Обеспечивают меньший угол атаки, а также снижают силу опрокидывания при наезде на препятствия.
Клиренс и центр тяжести транспортного средства могут располагаться без ограничений, но оптимально иметь максимально низкий центр тяжести. Это обеспечивает необходимость меньшего перемещения кабины для балансировки транспортного средства, что позволяет сэкономить энергию и увеличить быстроту реакции. При снижении центра тяжести ниже оси вращения мотор-колëс или колëс с приводом система из состояния неустойчивого равновесия переходит в состояние устойчивого равновесия. По аналогии с игрушкой «ванькой-встанькой» при возбуждении стремится минимизировать потенциальную энергию и занять состояние равновесия.
Тормозная система транспортного средства оснащена рекуперативным торможением, мотор-колëсами или колëсами с приводом; инерционным торможением кабиной; механическими тормозами, расположенными на мотор-колëсах или колëсах с приводом; тормозами, расположенными на опорных колëсах.
Все электронные приборы транспортного средства связаны между собой и внешними участниками посредством проводной связи, например, по таким протоколам как CAN, I2C, UART, Ethernet или беспроводной связи, например, по таким каналам как WiFi, Bluetooth, радиоканал, используемый пультом дистанционного управления.
Кроме того, данные телеметрии транспортного средства можно передавать на сервер для сбора, последующего анализа данных о состоянии и перемещения транспортного средства.
Для открытия дверей и сообщения о местоположении транспортного средства пользователю, отображения телеметрии транспортного средства может быть использовано мобильное приложение для смартфона, получаемое с сервера провайдера или производителя транспортного средства.
Команды управления, вычисляемые центральным микропроцессом, подаются на мотор-колëса или колëса с приводом и линейный актуатор, перемещающий кабину. Командой на мотор-колëса или колëса с приводом может быть требуемая скорость или крутящий момент. На линейный актуатор подается команда положения кабины. Ошибка исполнения команды корректируется обратной связью от датчиков с помощью цикла из теории управления.
Заявленное транспортное средство с одноосным расположением колëс работает посредством осуществления следующих приемов. При этом задачей блока управления транспортным средством является обеспечение положения кабины параллельно земле при движении транспортного средства с ускорением за счет перемещения кабины, и представляет собой задачу системы с неустойчивым равновесием.
Одним из примеров такой задачи является система обратного маятника, решение которой является базовой задачей в машинном обучении с подкреплением (reinforcement learning).
Таким образом, рассматривается движение прямо без вертикального ускорения, что продемонстрировано на фиг. 4.
m - центр тяжести транспортного средства;
Fтр - сила трения покоя, равна по модулю и противоположна по направлению силе инерции при прямолинейном движении;
Fe - сила инерции, равна по модулю и противоположна по направлению произведению ускорения тела на его массу;
Fn - сила нормальной реакции поверхности равна по модулю и противоположна по направлению силе тяжести;
α - угол между центром масс и точкой опоры;
l - расстояние от центра тяжести до точки опоры по оси y;
k - расстояние от центра тяжести до точки опоры по оси x.
В момент ускорения на транспортное средство действуют силы ma с плечом h и сила тяжести mg с плечом b. Их моменты должны быть равны, чтобы кабина транспортного средства не начала вращаться по окружности с центром в точке опоры.
m*a*h = m*g*b
a*h = g*b
b = a/g*h
При этом имеются следующие допущения, представленные в расчетах:
- Трение в оси колеса = 0
- Нет колебаний кабины в стационарном положении
- Не используются в расчетах внешние силы, действующие на транспортное средство, в том числе и сила сопротивления воздуха.
Для динамических расчетов показателей и балансировки транспортного средства могут использоваться PID (ПИД) - регуляторы, настроенные эмпирическим путем, многослойные и однослойные нейронные сети, обученные методом обучения с подкреплением (reinforcement learning) в реальных испытаниях, виртуальной среде или в смешанной модели.
Таким образом, основным отличием балансировки в заявленном способе управления транспортного средства от других систем балансировки двухколëсных одноосных и одноколëсных персональных транспортных средств является отсутствие необходимости водителя данного транспортного средства обеспечивать баланс транспортного средства изменяя центр тяжести собственного тела - наклоняя его вперед или назад, влево или вправо, приседая, перенося вес тела с одной ноги на другую, с пятки на носок и т.д., потому что в предлагаемом механизме изменение центра тяжести производится за счет перемещения кабины и изменения угловых скоростей колëс транспортного средства. Значения команд по перемещению кабины и изменения угловых скоростей мотор-колëс или колëс с приводом транспортного средства осуществляют центральным микропроцессом с программным обеспечением через каждый настраиваемый интервал времени путем анализа показателей телеметрии транспортного средства и расчета команд, подаваемых на линейный актуатор кабины и мотор-колëс или колëс с приводом. При этом водителю нет необходимости обеспечивать активную и постоянную балансировку транспортного средства собственным телом. Водитель только управляет транспортным средством при помощи привычных для него органов управления руля, педалей газа и тормоза, переключателя направления движения.
Далее в процессе движения транспортное средство постоянно обеспечивает положение кабины параллельно земле за счет анализа данных датчиков, указанных на фиг. 3, изменяя положение кабины и угловые скорости колëс.
Таким образом, для поддержания равновесия транспортного средства выполняют следующий ряд приемов: посредством автоматического управления изменяют положение центра тяжести с помощью перемещения кабины транспортного средства с помощью работы линейного актуатора и изменения угловых скоростей мотор-колëс или колëс с приводом транспортного средства. При этом кабину транспортного средства перемещают вперед или назад относительно оси мотор-колëс или колëс с приводом транспортного средства посредством линейного актуатора, а угловые скорости мотор-колëс или колëс с приводом задают и изменяют электромотором и драйверами указанных колëс, при этом контроль потери равновесия осуществляют электронным следящим устройством, а восстановление равновесия осуществляют за счет перемещения центра тяжести транспортного средства путем перемещения кабины относительно оси вращения колëс и изменения угловых скоростей мотор-колëс или колëс с приводом посредством подачи энергопитания от бортового или внешнего источника питания.
При этом при возникновении ситуации, кода под воздействием внешних сил транспортное средство выходит из равновесного состояния, возникает опрокидывающий момент. С помощью линейного актуатора перемещают кабину транспортного средства, а посредством моторов, колëс с приводом или мотор-колëс изменяют угловую скорость указанных колес, обеспечивая изменение центра тяжести относительно точки опоры транспортного средства на плоскость и изменение линейной скорости транспортного средства, достаточные для контропрокидывающего момента, что компенсирует опрокидывающий момент, превосходя его, возвращает положение центра тяжести транспортного средства в равновесное состояние. При этом контроль за положением транспортного средства и возникающими отклонениями осуществляют посредством электронного следящего устройства, а управление приводами линейного актуатора кабины и колëс осуществляют посредством компьютерной системы. Сам механизм перемещения кабины оси может быть зубчатым, винтовым, ременным, гидравлическим или иным, энергопитание которого осуществляется от бортового или внешнего источника питания.

Изобретение относится к транспортным средствам. В способе управления транспортным средством в стояночном положении транспортное средство находится в состоянии устойчивого равновесия, опираясь на передние опорные колеса. При переключении в режим движения транспортное средство перемещает кабину до положения, параллельного земле, и переходит в состояние неустойчивого равновесия. В процессе движения транспортное средство управляется органами управления, при этом транспортное средство непрерывно обеспечивает положение кабины, параллельное земле, основываясь на постоянном анализе данных, полученных центральным микропроцессором от гироскопа, акселерометра, магнетометра, датчика положения кабины с помощью микропроцессора, включающего систему обратного маятника. Транспортное средство может изменять положение кабины и угловые скорости колес. Перемещение кабины вперед или назад осуществляется линейным актуатором. При завершении движения кабина перемещается вперед до опоры на опорные колеса и перехода в состояние устойчивого равновесия. Повышается маневренность. 2 н. и 4 з.п. ф-лы, 5 ил.
1. Способ управления транспортным средством, включающий в себя выполнение следующей последовательности этапов:
- в стояночном положении транспортное средство ожидает в состоянии устойчивого равновесия, опираясь на передние опорные колеса,
- для начала работы переключают транспортное средство в режим движения,
- транспортное средство перемещает кабину до положения, параллельного земле, и переходит в состояние неустойчивого равновесия,
- в процессе движения транспортным средством управляют при помощи органов управления - руля, педалей газа и тормоза, переключателя направления движения, а транспортное средство непрерывно обеспечивает положение кабины, параллельное земле, основываясь на постоянном анализе данных, которые центральный микропроцессор блока управления получает от датчиков гироскопа, акселерометра, магнетометра, датчика положения кабины с помощью микропроцессора, который включает систему обратного маятника, а также
- при необходимости транспортное средство изменяет положение кабины и угловые скорости колес, а перемещение кабины транспортного средства вперед или назад относительно оси мотор-колес или колес с приводом транспортного средства осуществляют посредством линейного актуатора,
- при завершении движения транспортное средство переводят в состояние стоянки,
- кабина перемещается вперед до опоры на опорные колеса и перехода в состояние устойчивого равновесия.
2. Транспортное средство, управляемое способом по п.1, состоящее из кабины и несущей платформы, двух основных колес с рамой, по меньшей мере одного двигателя и блока управления транспортным средством, состоящего из руля, педали газа, педали тормоза, панели управления и микропроцессора, взаимосвязанного с датчиками проводной либо беспроводной связью, отличающееся тем, что в качестве основных колес выбраны мотор-колеса либо колеса с приводом, кабина выполнена с возможностью перемещения вперед и назад относительно платформы благодаря линейному актуатору, расположенному под ней, датчиками являются гироскоп, акселерометр, магнетометр, датчик положения кабины и экодер углового положения основных колес.
3. Транспортное средство по п.2, отличающееся тем, что в качестве двигателя используется шаговый электродвигатель.
4. Транспортное средство по п.2, отличающееся тем, что на кабине либо несущей платформе расположены дополнительные опорные колеса, оснащенные тормозами.
5. Транспортное средство по п.2, отличающееся тем, что оборудовано дополнительными датчиками, а именно датчиком глобального позиционирования GNSS/GPS/GLONASS, камерами кругового обзора, 3D лидаром.
6. Транспортное средство по п.2, отличающееся тем, что кабина и рама выполнены из облегченных материалов, таких как композитные армированные полимеры - пластики, графитопластиковые материалы и алюминий.
| WO 2015090618 А2, 25.06.2015 | |||
| US 2011035101 А1, 10.02.2011 | |||
| БЕСПРОВОДНОЙ ДАТЧИК УРОВНЯ ТОПЛИВА ДЛЯ ТОПЛИВНОГО БАКА ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2584068C2 |
| Мотор-колесо транспортного средства | 1990 |
|
SU1745570A1 |
| МЕХАНИЗМ ОБРАТНОЙ СВЯЗИ РУЛЕВОГО КОЛЕСА | 2018 |
|
RU2716525C2 |
| ЭЛЕКТРОПРИВОД ТРАНСПОРТНЫХ СРЕДСТВ С АВТОНОМНЫМИ ИСТОЧНИКАМИ ПИТАНИЯ | 1997 |
|
RU2136104C1 |
| FR 3000666 A1, 11.07.2014 | |||
| US 2019258878 A1, 22.08.2019 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОНИЦАЕМОСТИ ДЕРЕВЯННЫХ ОБРАЗЦОВ ГАЗАМИ И ЖИДКОСТЯМИ | 0 |
|
SU161143A1 |
| МНОГОЦЕЛЕВЫЕ ТЕРМООБРАБАТЫВАЕМЫЕ АЛЮМИНИЕВЫЕ СПЛАВЫ И СВЯЗАННЫЕ С НИМИ ПРОЦЕССЫ И ОБЛАСТИ ПРИМЕНЕНИЯ | 2015 |
|
RU2676817C2 |
| US 4705716 A, 10.11.1987 | |||
| ОДНООСНОЕ КОЛЕСНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2007 |
|
RU2333862C1 |

