Изобретение относится к автоматическим регуляторам. Предлагаемый пропорционально-интегральный регулятор Негоды может быть использован в разнообразных системах автоматического регулирования, там, где в настоящее время используются П, И, ПИ и ПИД-регуляторы. Пропорционально-интегральный регулятор Негоды можно использовать в системах регулирования, к которым предъявляются требования или повышенной степени устойчивости, или наилучшего быстродействия, или минимального перерегулирования. Пропорционально-интегральный регулятор Негоды может быть также использован для управления объектами с меняющимися параметрами, а также в системах автоматического регулирования (САР) с заранее неизвестными характеристиками.
Известны нелинейные интегральные регуляторы [1], [2]. Недостатком этих регуляторов является относительно низкая степень устойчивости и относительно низкое быстродействие.
Известен регулятор [3], являющийся прототипом предлагаемого регулятора. Этот регулятор содержит усилитель постоянного тока, первый масштабирующий резистор, первый диод, подключенный анодом к катоду второго диода и к первой обкладке первого интегрирующего конденсатора, второй масштабирующий резистор, соединенный первым выводом с первым выводом первого масштабирующего резистора, третий диод, подключенный катодом к аноду четвертого диода и к первой обкладке второго интегрирующего конденсатора.
Недостатком этого регулятора является относительно низкое быстродействие.
Целью изобретения является повышение быстродействия регулятора.
Сущность изобретения заключается в том, что в нем установлены блоки выделения положительных и отрицательных отклонений сигнала управления от его среднего текущего значения, блок формирования среднего текущего значения сигнала управления и третий масштабирующий резистор, причем вход блока формирования среднего текущего значения сигнала управления соединен с выходом постоянного тока, а выход - с первыми входами блоков выделения положительных и отрицательных отклонений сигнала управления от его среднего значения, подключенных вторыми входами к выходу усилителя постоянного тока, а выходами - к вторым обкладкам соответственно второго и первого интегрирующих конденсаторов, первые выходы первого и второго масштабирующих резисторов соединены с инвертирующим входом усилителя постоянного тока и первым выводом третьего масштабирующего резистора, анод второго и катод четвертого диодов соединены с общей шиной регулятора, второй вывод первого масштабирующего резистора является входом "Задание" регулятора, второй вывод второго масштабирующего резистора является входом "Регулируемая величина" регулятора, выход усилителя постоянного тока является выходом регулятора, а второй вывод третьего масштабирующего резистора соединен с катодом первого и с анодом третьего диодов.
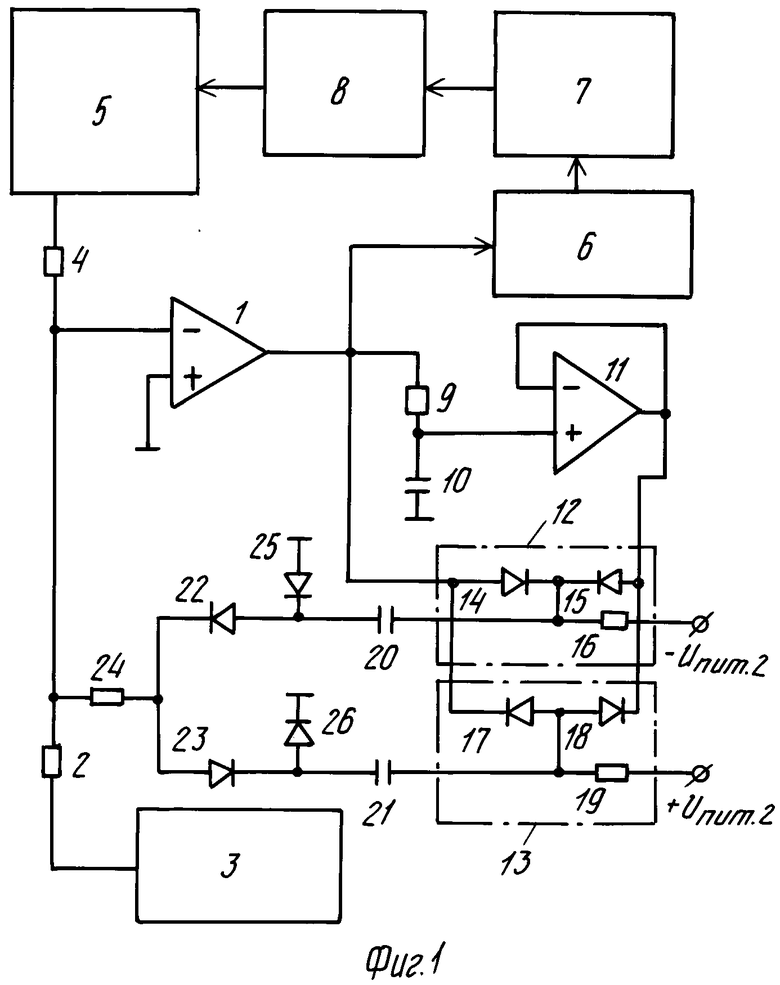
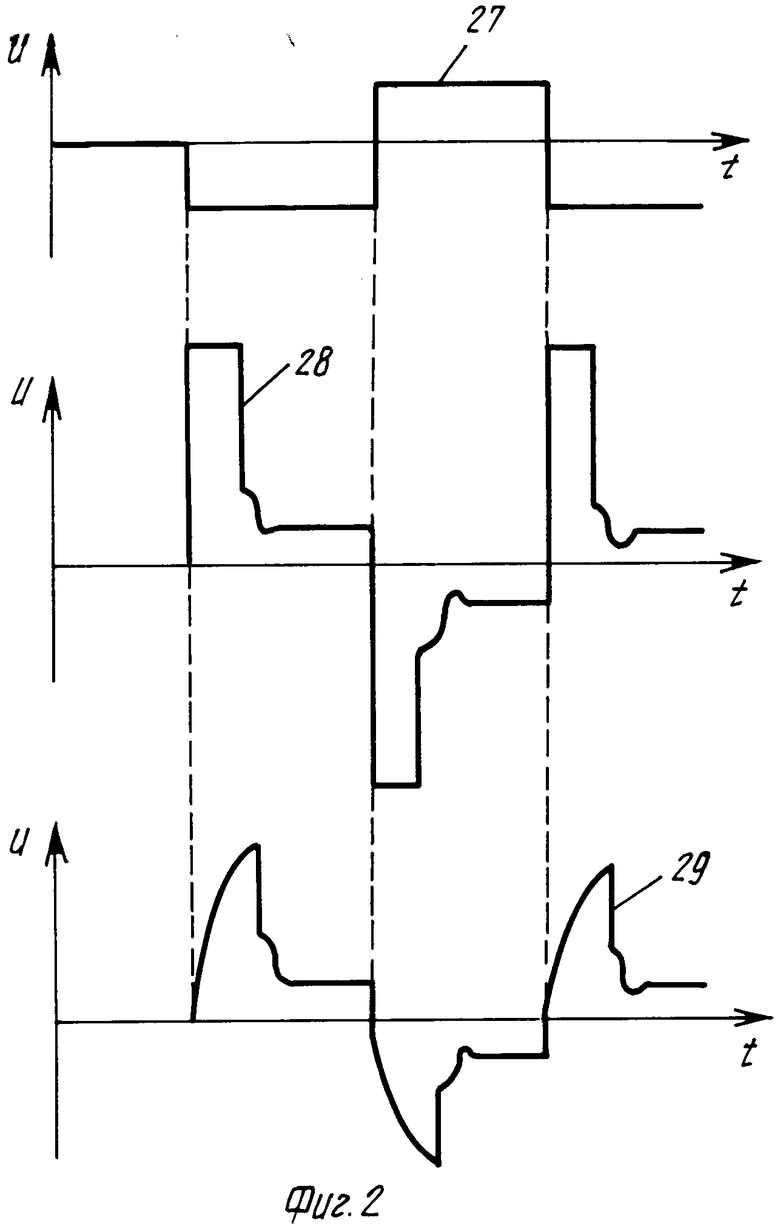
На фиг. 1 изображена принципиальная схема предлагаемого регулятора; на фиг. 2 - сравнительные временные диаграммы сигналов управления с третьим резистором и с закороченным третьим резистором.
Пропорционально-интегральный регулятор Негоды, изображенный на фиг. 1, содержит усилитель 1 постоянного тока, выполненный на операционном усилителе, инверсный вход которого через первый масштабирующий резистор 2 подключен к выходу задатчика 3 и через второй масштабирующий резистор 4 - к выходу датчика 5 обратной связи. Выход усилителя 1 является выходом управляющего сигнала регулятора. Этот выход через согласующее устройство 6 и регулирующий орган 7 соединен с объектом 8 управления. Согласующее устройство 6 может включать в себя или усилитель, или усилитель со схемой регулятора, например регулятора тока в системе электропривода. Объект 8 управления соединен с входом датчика 5 обратной связи. Выход усилителя 1 постоянного тока подключен также к входу формирователя сигнала среднего текущего значения управляющего сигнала, собранного на последовательно включенных резисторе 9 и конденсаторе 10, общая точка которых подключена к неинверсному входу операционного усилителя 11 собранного по схеме повторителя напряжения. Выходы усилителей 1 и 11 подаются на входы устройства 12 выделения положительных отклонений управляющего сигнала от его среднего текущего значения и устройства 13 выделения отрицательных отклонений. Устройство 12 выделения положительных отклонений собрано на диодах 14 и 15, аноды которых соответственно подключены к выходам усилителей 1 и 11, а катоды соединены между собой и через резистор 16 подключены к отрицательному источнику питающего напряжения -Uпит.2. Устройство 13 выделения отрицательных отклонений управляющего сигнала от его среднего текущего значения собрано на диодах 17, 18, катоды которых соответственно подключены к выходам усилителей 1 и 11, а их аноды соединены между собой и через резистор 19 подключены к положительному источнику питающего напряжения + Uпит.2. Общая точка катодов диодов 14 и 15 и общая точка анодов диодов 17 и 18 являются соответственно выходными клеммами устройств выделения положительных и отрицательных отклонений управляющего сигнала от его среднего текущего значения, которые соответственно через первый и второй интегрирующие конденсаторы 20 и 21 и соответственно через первый диод 22 и третий диод 23, а также через третий масштабирующий резистор 24 подключены к инверсному входу усилителя 1. Общая точка первого интегрирующего конденсатора 20 и первого диода 22, а также общая точка второго интегрирующего конденсатора 21 соответственно через второй диод 25 и четвертый диод 26 подключены к общему проводу схемы. Между общей точкой диодов 22 и 23 и инверсным входом усилителя 1 постоянного тока включен третий масштабирующий резистор 24.
Предлагаемый пропорционально-интегральный регулятор Негоды работает следующим образом. Если параллельно третьему масштабирующему резистору 24 включить закоротку, то получится схема интегрального регулятора. Суть работы такого регулятора заключается в следующем.
С помощью усилителя 1 производится усиление сигнала управления, который через согласующее устройство 6 и регулирующий орган 7 подается на объект 8 управления, а также на вход формирователя среднего текущего значения управляющего сигнала, включающего резистор 9 и конденсатор 10.
Сигнал, снимаемый с конденсатора 10, усиливается по мощности усилителем 11. Сигналы с выходов усилителей 1 и 11 подаются на соответствующие входы устройств выделения положительных отклонений 12 и отрицательных отклонений 13, которые выделяют соответствующие однополярные отклонений управляющего сигнала от сигнала его среднего текущего значения. Устройства 12 и 13 выделения однополярных отклонений питаются от источников питающих постоянных напряжений -Uпит.2 и +Uпит.2. Эти напряжения выбираются значительно, например раза в два больше напряжения питания операционных усилителей 1 и 11. Устройство 12 выделения положительных отклонений управляющего сигнала от сигнала его среднего текущего значения работает следующим образом. При равных напряжениях на выходе усилителей 1 и 11 ток через резистор 16 распределяется поровну на ток через диод 14 и усилитель 1 и на ток через диод 15 и усилитель 11, а напряжение на выходе устройства выделения положительных отклонений (общая точка диодов 14 и 15) будет равно напряжению на выходе усилителей 1 и 11. При появлении положительного отклонения управляющего сигнала от сигнала его среднего текущего значения диод 14 продолжает оставаться открытым, а диод 15 запирается. В этом случае весь ток от резистора 16 протекает через диод 14 и усилитель 1, а напряжение на выходе устройства 12 выделения положительных отклонений будет равно напряжению на выходе усилителя 1. Таким образом напряжение на общей точке диодов 14 и 15 при отсутствии положительных отклонений равно напряжению на выходе усилителя 11 (равно напряжению сигнала текущего значения управляющего сигнала), а при наличии положительных отклонений равно напряжению на выходе усилителя 1 (равно управляющему сигналу). Точно так же работает и устройство 13 выделения отрицательных отклонений.
Если зашунтировать закороткой третий масштабирующий резистор 24, то предлагаемый пропорционально-интегральный регулятор превращается в интегральный регулятор, осуществляющий следующую функцию: всякое удаление управляющего сигнала от сигнала его среднего текущего значения осуществляется замедленно (по интегральному закону), а всякое сближение этих сигналов осуществляется быстро (по пропорциональному закону). Реализация этой функции авторегулирования и обеспечивает положительные свойства интегрального регулятора: улучшение степени устойчивости и быстродействия системы, а также уменьшение перерегулирования.
Интегральная зависимость при всяких удалениях управляющего сигнала от сигнала его среднего текущего значения получается за счет того, что при указанных удалениях управляющего сигнала между входом и выходом усилителя 1 оказывается включенным или конденсатор 20 или конденсатор 21. Причем при нарастании положительных отклонений через диоды 14 и 22 оказывается подключенным конденсатор 20, а при нарастании отрицательных отклонений через диоды 17 и 23 - конденсатор 21. При всяких приближениях управляющего сигнала к сигналу его среднего текущего значения конденсаторы 20 и 21 оказываются с помощью диодов 22 и 23 отключенными от входа усилителя 1.
Если снять шунтирующую третий масштабирующий резистор 24 закоротку, то работа интегрального регулятора пропорционально изменится. В этом случае при удалениях управляющего сигнала от сигнала его среднего текущего значения последовательно с конденсаторами 20 и 21 оказывается включенным резистор 24.
Это приводит к тому, что удаления управляющего сигнала происходят не по интегральному, а по пропорционально-интегральному закону, сближение же управляющего сигнала с сигналом его среднего текущего значения происходит, как и раньше, быстро - по пропорциональному закону. При таком законе авторегулирования в случае скачкообразного изменения сигнала рассогласования сигнал управления также изменяется скачками, что приводит к увеличению быстродействия регулятора.
Улучшение быстродействия регулятора с включенным резистором 24 по сравнению с закороченным резистором иллюстрируется временными диаграммами сигналов, изображенными на фиг. 2. Кривая 27 изображает сигнал задания, кривая 28 - сигнал управления, кривая 29 - сигнал управления при закороченном резисторе 24.
Описанный пропорционально-интегральный регулятор Негоды испытывался в составе электропривода "Кемрон" болгарского производства, в котором вместо ПИ-регулятора монтировался предлагаемый пропорционально-интегральный регулятор Негоды. Испытания показали, что система авторегулирования с предлагаемым регулятором обладает высоким быстродействием по сравнению с известными регуляторами. Испытания велись на холостом ходу электропривода при ступенчатом изменении сигнала задания.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНТЕГРАЛЬНЫЙ РЕГУЛЯТОР НЕГОДЫ | 1990 |
|
RU2020536C1 |
| ИНТЕГРАЛЬНЫЙ РЕГУЛЯТОР НЕГОДЫ | 1990 |
|
RU2020535C1 |
| Интегральный регулятор Негоды | 1990 |
|
SU1805447A1 |
| ТИРИСТОРНЫЙ ЭЛЕКТРОПРИВОД НЕГОДЫ | 1989 |
|
RU2020715C1 |
| РЕВЕРСИВНЫЙ ЭЛЕКТРОПРИВОД | 1990 |
|
RU2020720C1 |
| ЗАДАТЧИК ОБОРОТОВ ДЛЯ ЭЛЕКТРОДВИГАТЕЛЯ | 1990 |
|
RU2020713C1 |
| РЕВЕРСИВНЫЙ ЭЛЕКТРОПРИВОД | 1990 |
|
RU2020716C1 |
| Электронный коммутатор | 1990 |
|
SU1781448A1 |
| Регулятор постоянного тока | 1990 |
|
SU1817075A1 |
| ОКТАН-КОРРЕКТОР | 1990 |
|
RU2030617C1 |
Изобретение относится к автоматическим регуляторам. Пропорционально-интегральный регулятор содержит усилитель постоянного тока, первый масштабирующий резистор, первый диод, подключенный анодом к катоду второго диода и к первой обкладке первого интегрирующего конденсатора, второй масштабирующий резистор, соединенный первым выводом с первым выводом масштабирующего резистора, третий диод, подключенный катодом к аноду четвертого диода и к первой обкладке второго интегрирующего конденсатора. Целью изобретения является повышение быстродействия регулятора. В регуляторе установлены блоки выделения положительных и отрицательных отклонений сигнала управления от среднего текущего значения, блок формирования среднего текущего значения сигнала управления и третий масштабирующий резистор, причем вход блока формирования среднего текущего значения сигнала управления соединен с выходом усилителя постоянного тока, а выход - с первыми входами блока выделения положительных и отрицательных отклонений сигнала управления от его среднего значения, подключенных вторыми входами к выходу усилителя постоянного тока, а выходами - к вторым обкладкам соответственно второго и первого интегрирующих конденсаторов, первые выводы первого и второго масштабирующего резисторов соединены с инвертирующим входом усилителя постоянного тока и первым выводом третьего масштабирующего резистора, анод второго и катод четвертого диодов соединены с общей шиной регулятора, второй вывод первого масштабирующего резистора является входом "Задание" регулятора, второй вывод второго масштабирующего резистора является входом "Регулируемая величина" регулятора, выход усилителя постоянного тока является выходом регулятора, а второй вывод третьего масштабирующего резистора соединен с катодом первого и с анодом третьего диодов. 2 ил.
Пропорционально-интегральный регулятор, содержащий усилитель постоянного тока, первый масштабирующий резистор, первый диод, подключенный анодом к катоду второго диода и к первой обкладке первого интегрирующего конденсатора, второй масштабирующий резистор, соединенный первым выводом с первым выводом первого масштабирующего резистора, третий диод, подключенный катодом к аноду четвертого диода и к первой обкладке второго интегрирующего конденсатора, отличающийся тем, что, с целью повышения быстродействия регулятора, в нем установлены блоки выделения положительных и отрицательных отклонений сигнала управления от его среднего текущего значения, блок формирования среднего текущего значения сигнала управления и третий масштабирующий резистор, причем вход блока формирования среднего текущего значения сигнала управления соединен с выходом усилителя постоянного тока, а выход - с первыми входами блоков выделения положительных и отрицательных отклонений сигнала управления от его среднего значения, подключенных вторыми входами к выходу усилителя постоянного тока, а выходами - к вторым обкладкам соответственно второго и первого интегрирующих конденсаторов, первые выводы первого и второго масштабирующих резисторов соединены с инвертирующим входом усилителя постоянного тока и первым выводом третьего масштабирующего резистора, анод второго и катод четвертого диодов соединены с общей шиной регулятора, второй вывод первого масштабирующего резистора является входом "задание" регулятора, второй вывод второго масштабирующего резистора является входом "регулируемая величина" регулятора, выход усилителя постоянного тока является выходом регулятора, а второй вывод третьего масштабирующего резистора соединен с катодом первого и с анодом третьего диодов.
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Тэлер Дж | |||
| и Пестель М | |||
| Анализ и расчет нелинейных систем автоматического управления | |||
| М | |||
| - Л., 1964, с.379-382. | |||
