Изобретение относится к медицине, в частности к устройствам для лечебной гимнастики, предназначенным для тренировки мышц и суставов ног и туловища, которые позволяют лечить больных, требующих индивидуального подхода.
Известно и выбрано в качестве прототипа устройство для тренировки мышц, в котором тренировка осуществляется более эффективно за счет того, что нога может совершать амплитудные качания. Устройство содержит подложки с элементами крепления стоп на них и механизм амплитудного качания, представляющий собой ось вращения, установленную в подшипниках и жестко соединенную через стержни с регулируемыми пакетами грузов. На оси вращения жестко закреплены элементы фиксации стоп таким образом, что возможно их смещения по длине относительно оси вращения.
Однако устройство не достаточно эффективно в работе, так как изменение положения высоты ноги больного возможно только посредством перемещения кресла с больным вверх-вниз с помощью подъемного механизма (например гидравлического), либо с помощью вставок и изменения крепления ремней стопы, что создает неудобства при процедуре лечения. Кроме того, туфля ноги недостаточно устойчиво закреплена на подложке и поэтому возможно смещение ноги при тренировке или лечении.
Цель изобретения - устранение перечисленных недостатков, повышение эффективности лечения мышц нижней конечности и повышение удобства в работе.
Поставленная цель достигается тем, что в устройстве для тренировки мышц, содержащем подложки с элементами крепления стоп, жестко соединенную с подложками для стоп ось механизма амплитудного качения, средство для создания нагрузок в виде пакетов грузов, имеется дополнительный нагрузочный узел механизма амплитудного качения, выполненный в виде крестообразного стержня, один из концов которого жестко закреплен в П-образной гайке, соединенной с возможностью поворота с механизмом изменения высоты положения стоп, а другие концы крестообразного стержня через подшипники соединены с осью амплитудного качания, причем элементы фиксации стоп выполнены с электромагнитом и размыкателем в пятке.
Механизм изменения высоты положения стоп может быть выполнен в виде винта с насаженной маточной гайкой с цилиндрическими выступами, входящими в пазы П-образной опорной гайки.
Предлагаемое устройство, как и устройство по прототипу, позволяет оказывать плавное и глубокое воздействие на группы мышц стопы, бедра, тазобедренного сустава и туловища посредством амплитудного качания стопы ног с преодолением регулируемого груза. Смещение стопы ног перпендикулярно оси вращения позволяет осуществлять избирательное воздействие на отдельные мышцы стопы, ахиллесова сухожилия, голени (икроножную и камболовидную), малую и большую берцовую мышцы, бедра (двуглавую, четырехглавую и др. мышцы), туловища (ягодичные, мышцы спины, брюшного пресса).
Отличия предлагаемого устройства от известного заключаются прежде всего в том, что ось механизма амплитудного качания через крестовидный стержень жестко соединена с механизмом изменения положения стоп ног, что позволяет без особых затруднений, легко и быстро изменять высоту положения ног больного. Жесткое крепление ботинка с помощью электромагнита на подложке позволяет зафиксировать стопу больного в строго определенном положении, обусловленном его заболеванием, и избежать каких-либо смещений стопы при проведении лечения. Наличие размыкателя в пятке создает удобства при снятии нагрузки и освобождении ноги.
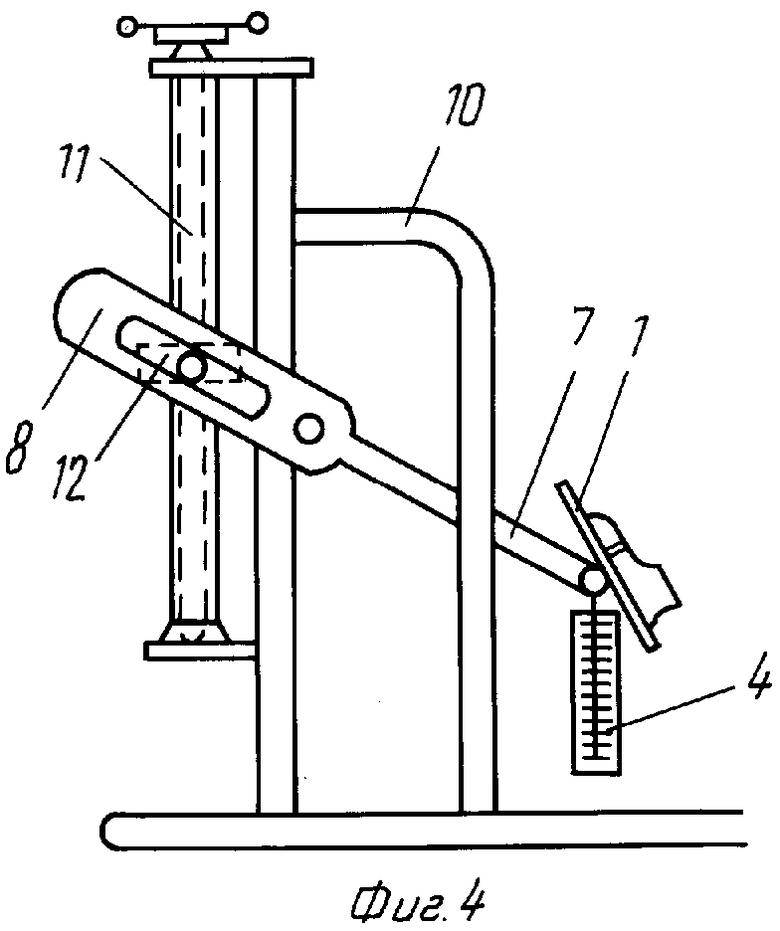
На фиг. 1 представлен схематично общий вид устройства, вид сверху; на фиг. 2 - схематично устройство, вид сбоку; на фиг.3 - механизм изменения положения высоты ступни с поднятой стопой ноги; на фиг.4 - с опущенной стопой ноги.
Устройство состоит из подложки 1 для стоп с туфлями 2. Подложки для стоп жестко соединены с осью амплитудного качания 3, на концах которой размещены грузы 4 для нагружения работы стоп. В туфлях 2 для стоп установлены подковообразные электромагниты 5 с размыкателями 5а в пятках. Ось амплитудного качания 3 через подшипники 6 соединена с одним из концов крестовидного стержня 7, противоположный конец которого жестко закреплен в П-образной опорной гайке 8. Два других конца крестовидного стержня 7 через подшипники 9 соединены с опорной стойкой 10. В опорной стойке 10 укреплен механизм изменения высоты положения стоп в виде червячного механизма, на винт 11 которого насажена матричная гайка 12, снабженная цилиндрическими выступами, входящими в пазы, выполненные в П-образной опорной гайке 8. Для большей устойчивости устройства предусмотрены направляющие 13, которые через подшипники 14 соединяют концы крестовидного стержня 7 с осью 3 амплитудного качания. Кроме того устройство содержит кресло 15 с подлокотниками 16 и подголовником 17. Сиденье кресла 15 установлено с возможностью горизонтального перемещения вперед-назад на Г-образной опоре 18. Предусмотрена также планка 19 для установления кресла под различными углами вплоть до горизонтального.
Устройство работает следующим образом. Больного помещают на кресло 15 на определенном расстоянии от устройства для амплитудного качания. Ногу (ноги) больного закрепляют в туфли 2 (можно работать с одной из ног или с двумя сразу). При необходимости сиденье кресла 15 может смещаться вперед-назад и закрепляться. Спинка сиденья может устанавливаться под различными углами в зависимости от состояния больного. Подголовник 17 регулируется по высоте. Туфли 2 с ногами пациента с помощью электромагнитов 5 жестко закрепляются на подложках 1. Устанавливаются грузы для нагружения каждой стопы. Грузы могут перемещаться и закрепляться на определенной высоте, что позволяет создать таблицу моментов. Вращая механизм с червячным винтом 11, матричная гайка устанавливается на определенной высоте, при этом П-образная опорная гайка 8, поворачиваясь, ведет в противоположную сторону крестообразный стержень 7 с вращением вокруг оси опорной стойки 10.
При воздействии на мышцы передней части ноги туфли 2 необходимо сместить вперед относительно оси 3 амплитудного качания. Вращая механизм с червячным винтом против часовой стрелки, матричная гайка 12 идет вверх, при этом П-образная опорная гайка 8, поворачиваясь, ведет крестообразный стержень 7 вниз с вращением вокруг оси опорной стойки 10.
Для воздействия на мышцы задней части ноги вращением маховика по часовой стрелке матричную гайку смещают вниз и воздействуют на П-образную опорную гайку 8 с крестовидным стержнем 7, которые поднимаются вверх, а туфель со стопой смещается вниз по отношению к оси амплитудного качания 3 (см. фиг.3).
Таким образом, предлагаемое устройство для тренировки мышц более удобно в работе. Механизм изменения положения стопы позволяет быстро без особых усилий изменять положение подложки и стопы на ней по высоте. Во время процедуры больной меньше перемещается. Жесткое закрепление стопы на подложке за счет магнитов исключает смещение стопы при процедуре лечения, повышая тем самым его эффективность, особенно для ортопедических больных, дает возможность эффективно лечить параличи (спастический, ДЦП).
Такое конструктивное выполнение механизма изменения высоты положения стоп позволяет снизить стоимость изделия на 20%.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для лечебной гимнастики стопы | 1989 |
|
SU1708334A1 |
| Кресло-тренажер | 1989 |
|
SU1703097A1 |
| КРЕСЛО ОПЕРАТОРА | 1992 |
|
RU2068646C1 |
| Тренировочное устройство для мышц спины и ног | 2018 |
|
RU2676493C1 |
| ЭЛЕКТРОЭНЕРГЕТИЧЕСКАЯ МАШИНА С МЫШЕЧНЫМ ПРИВОДОМ | 2014 |
|
RU2635201C2 |
| СПОСОБ СТИМУЛЯЦИИ ПРОИЗВОЛЬНОГО СОКРАЩЕНИЯ МЫШЦ И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2672482C1 |
| Устройство для тренировки мышечной системы спортсменов | 1989 |
|
SU1655523A1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ МЫШЦ И КОРРЕКЦИИ ОСАНКИ | 2001 |
|
RU2203711C2 |
| Кресло-тренажер | 1983 |
|
SU1139434A1 |
| Устройство для тренировки мышц Айунца | 1990 |
|
SU1741824A1 |
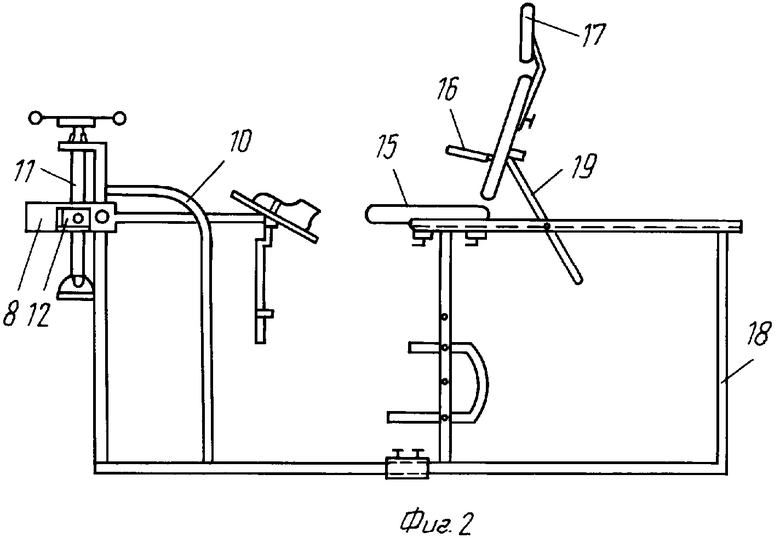

Использование: в медицине для лечебной гимнастики. Сущность : устройство для тренировки мышц содержит каркас с нагрузочным механизмом, включающим оси, установленные с возможностью амплитудного качания, на каждой оси 3 жестко закреплена педаль 1 с фиксатором стопы 2 и установлен набор грузов 4. В нагрузочный механизм введен крестообразный стержень 7 и червячная пара, винт 11 которой установлен на каркасе. Один конец крестообразного стержня 7 через подшипник 6 соединен с осями 3, а противоположный конец жестко связан с П-образной скобой, связанной с фигурной гайкой червячной пары. Перпендикулярные концы стержня 7 через подшипники 9 соединены с каркасом. Фиксатор стопы 2 выполнен в виде электромагнита и установленного в пяточной части размыкателя. 1 з.п.ф-лы, 4 ил.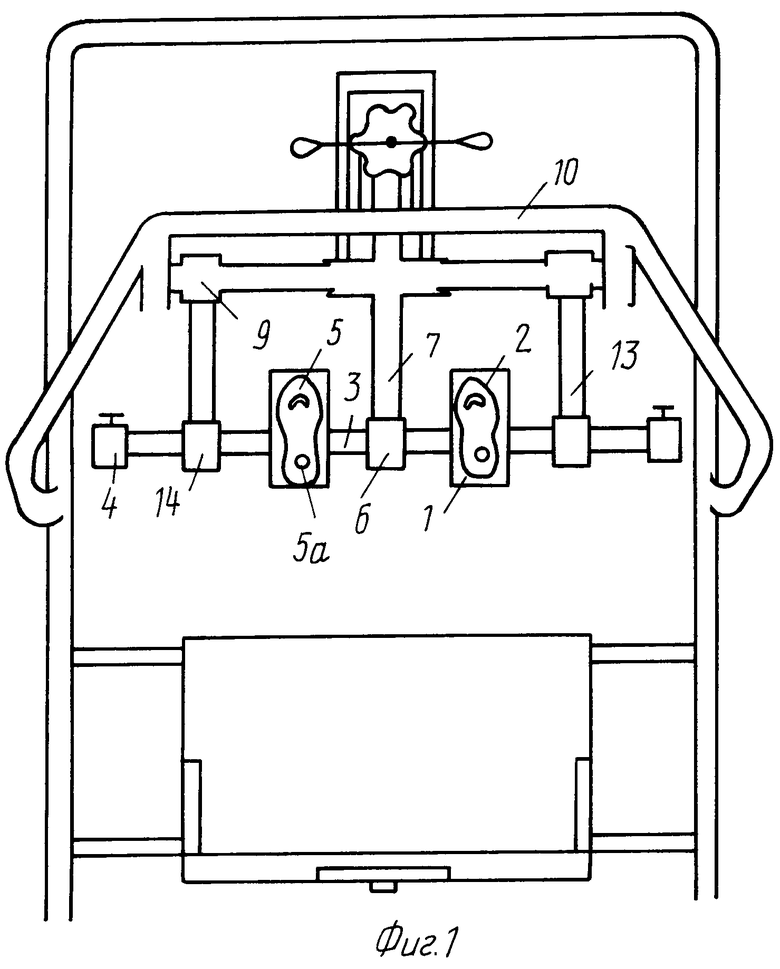
| Устройство для лечебной гимнастики стопы | 1989 |
|
SU1708334A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
