Изобретение относится к вычислительным устройствам, позволяющим решать различные задачи с кеплеровскими точками (КТ) и сферическими треугольниками, в частности расчет и построение следа орбиты КТ, прогноз ее положения относительно зоны целевого применения на заданный момент времени, и обратную задачу, определение взаимовидимости КТ и параметров наведения. Устройство может быть использовано для расчета, отображения и анализа элементов баллистической и навигационной обстановки при решении практических задач сферической тригонометрии.
Цель изобретения - расширение класса решаемых задач и повышение оперативности вычислений.
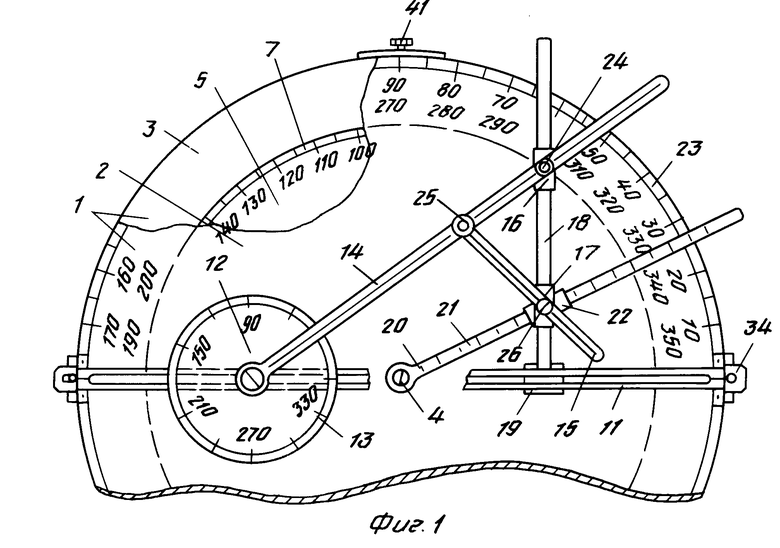
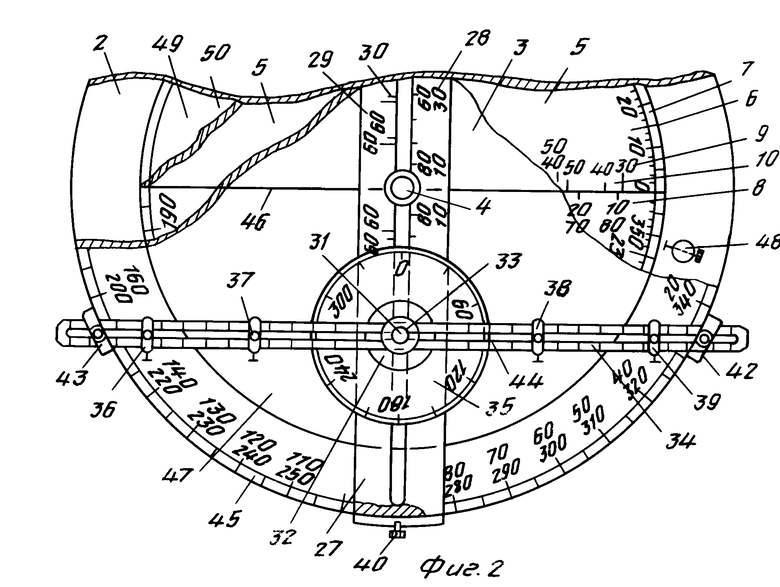
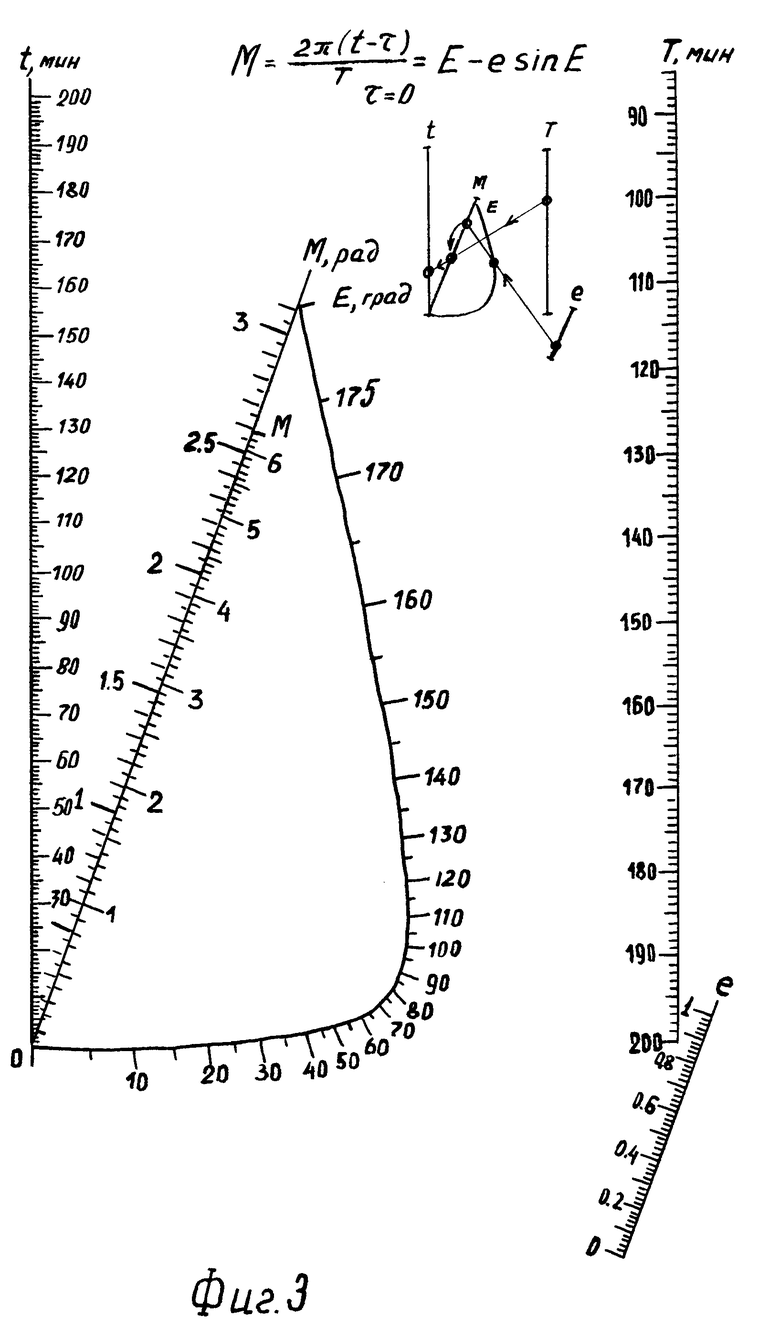
На фиг. 1 изображено предлагаемое устройство, вид со стороны первого диска футляра; на фиг. 2 - то же устройство, вид со стороны второго диска футляра; на фиг. 3 - номограмма для решения уравнения Кеплера.
Устройство содержит футляр 1 из двух прозрачных дисков 2 и 3, установленных на общей оси 4, между которыми размещен поворотный прозрачный диск 5 со шкалой 6 времени, градусной шкалой 7 на ободке диска и совмещенными по диаметру шкалами 8-10 широт соответственно стереографической, гномонической и ортографической проекций сферы с полюсами на общей оси 4, причем каждое деление шкал 8-10 оцифровано двумя цифрами, отличающимися на 90о. На внешней стороне диска 2 футляра диаметрально закреплена штанга 11, на которой установлен прозрачный лимб 12 с круговой градусной шкалой 13, закрепленный на одной оси с поворотным рычагом 14 с возможностью перемещения обоих вдоль оси штанги и фиксации заданного положения. На рычаге 14 одним концом с возможностью перемещения закреплен второй рычаг 15. Вторые концы рычагов 14 и 15 с помощью ползунов 16 и 17 связаны с направляющей 18, ориентированной перпендикулярно штанге 11, которая с помощью ползуна 19 имеет возможность возвратно-поступательного перемещения вдоль штанги 11. На общей оси 4 установлена линейка 20 с возможностью вращения на этой оси с линейной шкалой 21, которая снабжена ползуном 22, поворотно соединенным с ползуном 17. Для измерения угла поворота линейки 20 служит шкала 23, начало отсчета которой совпадает с продольной осью штанги 11. Для регулировки длин плеч рычагов 14 и 15 в соответствии с параметрами эллипса служат фиксаторы 24-26, причем длина плеча поворотного рычага 14 до фиксатора 24 равна большой полуоси эллипса, а длина плеча рычага 15 от точки его закрепления на рычаге 14 с помощью фиксатора 25 до точки закрепления на ползуне 17 равна длине части рычага 14 от фиксатора 25 до фиксатора 24 и равна полуразности длин полуосей эллипса. Элементы 11-26 с указанными связями составляют кулисно-рычажный эллипсограф. Точки эллипса с заданными параметрами лежат на общей оси ползунов 17, 22 и фиксатора 26. С внешней стороны второго диска 3 футляра на оси 4 закреплен с возможностью вращения движок 27 с нанесенными шкалами 28-30 широт в азимутальных проекциях сферы с полюсами на общей оси, совпадающими с аналогичными шкалами на прозрачном диске 5. С движком 27 посредством полой оси 31 и соосно соединенных ползунков 32 и 33 связана визирная линейка 34 с возможностью перемещения внутри ползунка 33. На ползунке 32 закреплен прозрачный лимб 35 с круговой градусной шкалой, начало отсчета которой совпадает с диаметральной осью движка. Движок 27 с ползунком 32 и визирная линейка 34 с ползунком 33, соединенные осью 31 с возможностью перемещения вдоль оси движка, составляют вращательную пару. На линейке 34 по два с разных сторон от оси 31 закреплены скользящие бегунки-указатели 36-39. Фиксация положения звеньев вращательной пары относительно диска 3 обеспечена фиксирующими элементами 40, 41 на движке 27 и фиксаторами 42, 43 на визирной линейке с возможностью перемещения вдоль ее оси. На линейке 34 нанесена равномерная шкала 44 на 100 делений. По границе диска 3 нанесена круговая шкала 45, начало отсчета которой совпадает с диаметральной базовой линией 46 кругового рабочего поля 47, нанесенного на диске 3, граница которого совпадает с диском 5. Фиксация положения диска 5 обеспечена фиксатором 48 положения. Кроме того, между дисками 2 и 5 на общей оси 4 размещен съемный диск 49 с расположенными с разных сторон картами полушарий Земли в проекции Постеля с нанесенной картографической обстановкой.
С помощью предлагаемого устройства может быть решен целый ряд задач определения кинематических характеристик КТ и орбитальных систем, а также практических задач сферической тригонометрии, в частности решение сферических треугольников. Сущность решения задач с КТ с использованием предлагаемого устройства заключается в возможности определения с помощью эллипсографа угловых параметров положения КТ на орбитальном эллипсе, истинной и эксцентрической аномалии и возможности связать их с помощью специальной номограммы (фиг. 3) со временем, т.е. решить уравнение Кеплера, а также найти длину радиуса-вектора КТ. При этом поворот линейки 20 на угол, равный значению истинной аномалии, за счет связей элементов кулисно-рычажного механизма и соотношений длин его звеньев перемещает поворотный рычаг 14 на угол, равный эксцентрической аномалии Е, измеряемый по шкале 13 лимба 12. Положение центра фиксатора 26 относительно линейки 20 указывает на шкале 21 длину радиуса-вектора КТ. Положение КТ в сферической системе координат на заданный момент времени определяется через наклонение плоскости орбиты i и аргумент широты U = ν + ω путем решения прямоугольного сферического треугольника. Решение задач сферической тригонометрии с помощью устройства основано на реализации в его элементах и связях основных свойств перспективно-азимутальных проекций сферы: для гномонической проекции - изображение ортодромии в проекции прямой линией, для стереографической - отображение окружности в окружность на плоскости проецирования и для ортографической - возможность параллельного переноса проекций точек дуг больших и малых кругов, а также различных комбинаций указанных свойств. Сущность решения сферических треугольников с использованием устройства заключается в совмещении проекций одной из сторон сферического треугольника с диаметральной осью движка 27 и приведении принадлежащей этой стороне вершины к центру движка на оси 4. Для этого визирную линейку 34, на которой с помощью указателей 36-39 зафиксирована гномоническая проекция стороны в виде отрезка прямой, перемещают вдоль оси движка 27, зафиксированного по отношению к линейке в перпендикулярном положении, до совмещения оси 31 с центром движка. Искомую сторону получают на широтной шкале 28-30 движка в соответствующей проекции, а угол между двумя последовательно совмещенными с осью движка проекциями сторон - на шкале 45 долгот диска 3. Рассматривается работа предлагаемого устройства для решения следующих задач.
З а д а ч а 1. Расчет и построение следа орбиты КТ.
Пусть заданы следующие параметры орбиты КТ: большая а и малая b полуоси орбитального эллипса с эксцентриситетом е, наклонение орбиты i, период обращения Т, аргумент перигея ω и время его прохождения τ . Необходимо построить след КТ в стереографической проекции. Решение задачи выполняется следующим образом. Сначала настраивают эллипсограф на заданные параметры орбитального эллипса. Для этого совмещают центр лимба 12 с осью 4, а рычаги 14 и 15 и линейку 20 с осью штанги 11. Центр лимба 12 с рычагом 14 закрепляют на расстоянии с = а . е от оси 4. Длину плеча рычага 14 с помощью фиксатора 24 устанавливают равной большой полуоси а эллипса, длину плеча рычага 15 с помощью фиксаторов 25 и 26 - равной полуразности длин полуосей эллипса, причем между фиксаторами 24 и 25 устанавливается такое же расстояние. Диск 5 фиксируется на отметке, равной углу ω , с помощью фиксатора 48. Эллипсограф настроен. Рассматривается получение одной точки следа. Остальные точки с заданным шагом по времени или эксцентрической аномалии Е находят аналогично.
Установив рычаг 14 по шкале 13 лимба 12 на отметке, равной углу Е, на шкале 7 диска 5 линейка 20 указывает соответствующее значение аргумента широты U. По шкале 21 линейки 20 в центре фиксатора 26 снимают значение r длины радиуса-вектора КТ. Далее определяют проекцию КТ в сферической системе координат на вращающуюся сферическую Землю. Для этого сначала решают прямоугольный сферический треугольник, связывающий широту ϕ и долготу λ через наклонение i и аргумент широты U, найденный ранее. Для определения долготы λ движок 27 устанавливают по шкале 45 на угол, равный наклонению i, отсчитанный от базовой линии диска 5, и фиксируют элементами 40, 41. Визирную линейку 34, установленную по шкале лимба 35 перпендикулярно движку 27, перемещают вдоль движка 27 с сохранением взаимно перпендикулярного положения обоих до пересечения оси линейки 34 с делением на гномонической шкале 9 диска 5, соответствующим углу аргумента широты U. Центр оси 31 на гномонической шкале 29 указывает значение искомой долготы λ . Для определения широты ϕ точку U, отмеченную на предыдущем шаге, переводят по шкале 10 диска 5 в ортографическую проекцию путем перемещения линейки 34 с сохранением перпендикулярного положения до пересечения линейкой отметки на шкале 10, соответствующей углу U. В полученной точке фиксируется один из бегунков-указателей 36-39. Далее, совмещая визирную линейку 34 с осью движка 27 с сохранением длины отрезка, отмеченного указателем, и центры осей 31 и 4, по отметке бегунка-указателя на шкале 30 снимают значение широты ϕ . На следующем шаге находят проекции КТ на вращающуюся с угловой скоростью ω3 = =0,25 град/мин сферическую Землю. Для этого по номограмме (фиг. 3) и заданному значению Е находят значение времени t и вычисляют значение угла поворота Земли за время t по формуле Δλ = ω3. t. Далее движок 27 и совмещенную с ним визирную линейку 34 с отмеченным на последней с помощью бегунка-указателя значением широты ϕ устанавливают по шкале 45 на деление, соответствующее углу λ . Смещая движок и линейку относительно отметки λ на угол Δλ , зафиксированный на визирной линейке бегунок указывает положение КТ относительно вращающейся Земли, которое помечается на рабочем поле 47. Плавно соединяя найденные с помощью описанных операций положения КТ, получают ее след, который может быть скопирован на диск 5 и использоваться для решения других задач.
З а д а ч а 2. Определение взаимовидимости КТ.
Пусть положение двух КТ на заданный момент времени to на их следах определено сферическими координатами КТ1 ( ϕ1 , λ1 ) и КТ2 ( ϕ2 , λ2 ). Полагают, что следы обоих КТ построены в соответствии с решением задачи 1 и нанесены на рабочее поле 47 от заданных долгот восходящих узлов λэ1 (t1) и
λэ2 (t2), где t1 и t2 - ближайшие к моменту to времена восходящих узлов орбит первой и второй КТ. Необходимо проверить условие взаимовидимости КТ на момент to : h > hд, где h - удаление по перпендикуляру линий визирования КТ от центра Земли; hд - допустимое для визирования расстояние.
Задача решается за несколько шагов. На первом шаге находят угловое расстояние Θ между КТ по дуге большого круга. Для этого координаты точек КТ1 и КТ2 по шкалам широт движка 27 или диска 5 переводят из стереографической проекции в гномоническую. Через полученные точки на рабочем поле 47 проводят визирную линейку 34 и фиксируют ее в этом положении с помощью фиксаторов 42, 43. Движок 27 устанавливается с помощью лимба 35 перпендикулярно визирной линейке и фиксируется стопором 40, 41. Далее демонстрируется решение сферического треугольника при определении стороны по известным двум сторонам ϕ1 и ϕ2 и углу между ними λ12 = |λ2 -λ1| . Переводя последовательно базовую линию диска 5 с ортографической шкалой 10 в точки λ1 и λ2 и помечая на указанных долготах значения широт ϕ1 и ϕ2 в ортографической проекции, визирную линейку 34 перемещают вдоль движка до совмещения с отмеченными точками ϕ1 и ϕ2 , положение которых на линейке фиксируется бегунками-указателями. Совмещая линейку 34 с осью движка 27 путем ее вращения относительно занятого осью 31 на движке положения, линейку с сохранением положения указателей относительно оси 31 перемещают вдоль движка до совпадения осей 31 и 4. Положение бегунков-указателей в достигнутом положении на ортографической шкале 30 движка дает искомое значение Θ угла дуги большого круга. На втором шаге решается прямоугольный сферический треугольник, связывающий аргумент широты U и наклонение i с широтой ϕ и долготой λ . Определение аргумента широты U для каждой КТ как стороны прямоугольного сферического треугольника по известной стороне ϕ и двум прилежащим углам i и 90о аналогично рассмотренному в задаче 1 определению широты, но с выполнением операций в обратной последовательности. На третьем шаге с помощью эллипсографа находят длины радиусов-векторов КТ1 и КТ2 на момент to, предварительно настроив его в соответствии с параметрами орбитального эллипса каждой из точек. При этом линейку 20 устанавливают на деление шкалы 23, соответствующее значению угла ν = U - ω , U для каждой КТ определено на предыдущем шаге. Центр фиксатора 26 указывает на шкале 21 линейки 20 деление, соответствующее значению длины радиуса вектора КТ. На четвертом шаге решается линейный треугольник, в котором по длинам двух сторон r1 и r2 и углу Θ между ними, найденным на третьем и первом шагах, определяют высоту h, опущенную на третью сторону. Для этого на сторонах угла Θ , построенных с помощью базовых линий дисков 3 и 5 по шкале 45, используя шкалу 44 на визирной линейке, отмечают концы r1 и r2 сторон треугольника и с ними совмещают визирную линейку, фиксируя последнюю в этом положении. Перемещая движок 27 относительно зафиксированной линейки 34, его устанавливают в перпендикулярное положение. На оси движка 27 отмечают в масштабе шкалы 44 точку hд допустимого для визирования расстояния. Если метка hд при выставлении движка в перпендикулярное положение не пересекает продольную ось визирной линейки, то КТ1 и КТ2 взаимовидимы, в противном случае нет. Случай h = r3, где r3 - радиус Земли, характеризует взаимовидимость по горизонту КТ и наземного наблюдателя. Это используется для построения зон радиовидимости или других зон целевого применения для наземных потребителей.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ РЕШЕНИЯ НАВИГАЦИОННЫХ ЗАДАЧ | 1990 |
|
RU2028667C1 |
| Прибор для построения аксонометрических проекций объекта | 1972 |
|
SU449830A1 |
| Эллипсограф | 1989 |
|
SU1729816A1 |
| Прибор для масштабного перевода линейных величин | 1975 |
|
SU719899A1 |
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ УСИЛИЙ В ТАКЕЛАЖНОЙ ОСНАСТКЕ ГРУЗОВОЙ ПОДНОРКИ | 1970 |
|
SU284438A1 |
| Прибор для геодезических построений | 1987 |
|
SU1440751A1 |
| Счетная линейка | 1984 |
|
SU1231516A1 |
| Чертежный прибор для построенияпРяМОугОльНыХ АКСОНОМЕТРичЕСКиХизОбРАжЕНий | 1978 |
|
SU799967A1 |
| Линейка для суммирования | 1990 |
|
SU1791821A1 |
| Устройство для графического решения задач | 1984 |
|
SU1171810A1 |
Изобретение относится к устройствам, для решения задач с кеплеровскими точками и сферическими треугольниками в азимутальных проекциях сферы и может быть использовано для отображения и анализа элементов баллистической обстановки, при решении практических задач сферической тригонометрии. Целью изобретения является расширение класса решаемых задач. Сущность изобретения: устройство содержит футляр из двух прозрачных дисков, установленных на оси, поворотный диск со шкалой времени, градусной шкалой и шкалами широт, причем на одном прозрачном диске закреплена штанга с установленным на ней лимбом с градусной шкалой, закрепленным на одной оси с поворотным рычагом, на котором закреплен второй рычаг, при этом оба рычага с помощью ползунов связаны с направляющей, которая с помощью третьего ползуна имеет возможность возвратно-поступательного перемещения вдоль штанги, линейку с линейной шкалой и четвертым ползуном, шкалу, фиксаторы, движок, установленный с внешней стороны другого прозрачного диска, со шкалами широт, который посредством полой оси и двух соосно соединенных ползунков связан с визирной линейкой, причем на одном ползунке закреплен лимб, бегунки-указатели, установленные на визирной линейке, фиксаторы. 3 ил.
УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КИНЕМАТИЧЕСКИХ ХАРАКТЕРИСТИК КЕПЛЕРОВСКИХ ТОЧЕК И РЕШЕНИЯ ЗАДАЧ В ПРОЕКЦИЯХ СФЕРЫ, содержащее поворотный рычаг, один конец которого осью поворотно закреплен на штанге, на которой с возможностью возвратно-поступательного перемещения установлен первый ползун с направляющей, на последней с возможностью вертикального перемещения установлены второй и третий ползуны, на втором ползуне поворотно закреплен второй конец поворотного рычага, а на третьем - первый конец рычага, второй конец которого поворотно закреплен на поворотном рычаге, при этом длина рычага равна длине плеча поворотного рычага от точки его закрепления на нем до ползуна, отличающееся тем, что оно дополнительно содержит футляр из двух прозрачных дисков с градусными шкалами по границе, установленных на общей оси, между которыми размещены съемный диск с расположенными с разных сторон картами полушарий Земли в проекции Постеля и прозрачный диск с фиксатором положения со шкалами широт в азимутальных проекциях сферы, круговой шкалой времени и градусной шкалой на ободке, на внешней стороне первого диска футляра диаметрально закреплена штанга, на которой установлен прозрачный лимб с круговой градусной шкалой, закрепленный на одной оси с поворотным рычагом с возможностью перемещения обоих вдоль оси штанги, а также линейку с линейной шкалой, установленную с возможностью вращения на общей оси и снабженную четвертым ползуном, поворотно соединенным с третьим ползуном, движок, закрепленный на общей оси с возможностью вращения и расположенный с внешней стороны второго диска футляра с нанесенными шкалами широт в азимутальных проекциях сферы с полюсами на общей оси и совпадающими с аналогичными шкалами на прозрачном диске, вторую визирную линейку с линейной шкалой и бегунками-указателями, связанную с движком посредством соосно соединенных пятого и шестого ползунков, лимб с круговой градусной шкалой, закрепленный на пятом ползунке, причем движок с пятым ползунком и вторая визирная линейка, имеющая возможность перемещения относительно шестого ползунка, составляют вращательную пару, движок и вторая визирная линейка снабжены фиксирующими элементами.
| Артоболевский И.И | |||
| Механизмы в современной технике, т.II.М.: Наука, 1979, N 990. |
