Изобретение относится к устройствам для вынолнеиия графических расчетов, в частности расчетов снловы.х и кинематических параметров, характеризуюнтих подъе.мы конструкций и аппаратов методом выжималия, т. е. нодъемом В вертикальное положение шарнирпо за Крепленной па фундаменте н соединенной пеносредственпо с тюдъемпой подпоркой пли через тросовые нодвески (верхнюю и нижнюю) конструкпни при стягнваппн нолпснастов, соединяющих основной ее поворотный шарнир с основанием нодноркн.
Известный способ получеппя значений параметров, характеризуюш,их подъемы методом выжимания, предусматривает многократные вычерчнваиия взанмоиоложений конструкций с .монтажной оснасткой н определением усилий, возникающих в них нри различных вариантах иодъемо.в выжнманнем, и требует значительных затрат времени.
Определепне уснлнй в процессе нодъема н повышение производительности труда достигаются примепеннем подвижной рычажно-шарннрной системы линеек, выполненной в внде замкнутого подвижного треугольн;1ка с изменяемымн Сторонами, основание которого фиксировано осью круговой шкалы Корлуса с одного конца и шарннрной осью, перемещаемой по краю корпуса линейки, с другого конца, нричем обе осн расноложеиы в нродольисм
иазе линейки-основання. Одна сторона треугольника выполиеиа в виде ллнейки с иродольным пазом и транспортиром, центр которого совмещен с верщпной треугольника. К зершнне треугольника, противолежащей основапню, присоединены две донолннтельные лнпейкп с нродольны.мн пазаМн, в которые вставлепы фпкспрующпе щтыри, соедппяющ.ие лпнейкн с угольником, причем иа конце одной из линеек
нанесена прямоугольная сетка. Уголынпс снабжен продольным пазом, выполнеппым вдоль короткой стороны н соединяющим его с осью круговой шкалы корнуса, п отверстнямп вдоль другой стороны, в которые вставлепы фнксирующие штыри дополнительных лииеек. К вершине треугольника, нрогнволежащей осповапию, присоединена стрелка-указатель, связанная через шестеренку и зубчатую рейку с осью круговой шкалы корпуса.
Это нозволяет механизировать графическнй способ расчета, моделировать различиые разновидности подъемов, типоразмеров мо 1тажной оснастки н возможиых стадий нроцесса подъемов методов выжимаиия.
и - шкала высоты фундамента и значений нормального давления основания подпорки на рельсы;
б - шкала горизонтальной проекции расстояния между основным шарниром и основанием ноднорки;
в - угловая шкала для регистрации углов наклона поднимаемой конструкции и радиусавектора центра тяжести системы к горизонтали;
г - кольцевая шкала для определения значения косинуса угла наклона к горизонтали радиуса-вектора центра тяжести системы;
д - угловая шкала для регистрации углов наклона полиснастов к горизонтали;
2- рейсшина с направляюшим иазом;
3- двнжок с нанразляюш,им выступом и прижимным винтом;
4- лииейка-иМИтатор подпорки, снабженная линейной шкалой длины нодиорки;
5-указатель-дублер усилий в подпорке с силовой шкалой;
6- верхний шарнир 6 линейки-имитатора 4, свободно перемещаемый отпоситгльно карты;
7- лИНейка, соединенная с осиоваиием нодвижным фрикционным зажимом и снабженная механизмом нлоскопараллельного движения (на лннейке нанесены шкалы: е - линейная-шкала для регистрации расстояния между основным н верхннм шарнирами, ж - кольцевая шкала для установки указателя 8};
8- указатель значения косинуса угла наклона радиуса-вектора центра тяжести системы и значения синуса суммы углов наклона верхней нодвескн и иодиорки, а также угла наклона системы к горизонтали;
9- линейка-имитатор нижней иодвески, снабженная линейной шкалой длины;
W - указатель усилий в нижней (иодвеске, с номощыо направляющего шлица соединенный с линейкой-имитатором нижней подвески,
11- транснортнр нодвесок, снабженный шкалами (угловая шкала «и для регистрации координатных углов подвесок; к-нрямоугольная сетка, иснользуемая нри оиределении усилий в нодвесках);
12- линейка-имитатор верхней подвески, снабженная линейной шкалой длины;
13- лииейка-имитатор ноднимаемой коиструкции, снабженная рядом отверстий;
14- моделирующий поворотный шарнир, соединяющий всю систему линеек с основанием;
15- указатель угла наклона иоднимаемой конструкции;
16- указатель угла наклона к -горизонтали радиуса-вектора центра тяжести системы;
17- линейка-имнтатор полиспастов, замыкающая цепь подвижных звеньев, снабженная линейной ЩКалой «л для регистрации длины грузовых полиспастов ii величины усилий в них;
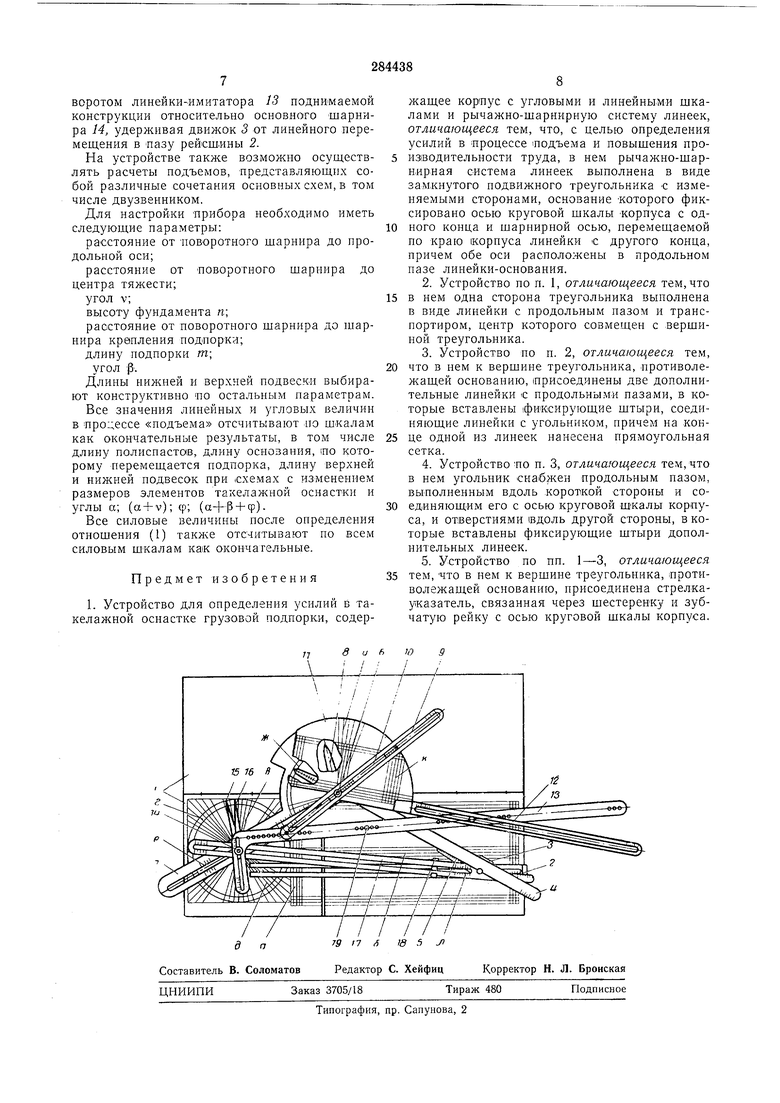
Прибор сконструирован по -принципу плоского рычажно-шарнирного механизма с замкнутым контуром подвижных звеньев и изменяемыми геометрическими параметрами кинематической цепи. На двустворчатой карте 1 ирижимным винтом подвижно закреплена рейсшина 2 с Направляющим иазом. В на-ира вляющий паз рейсщнны 2 вставлен нанравляющим выступом движок 3 с нрижимным винтом.
Направляющим выступом движка 3 шарнирно сопряжены линейка-имитатор подпорки 4, указатель-дублер 5 усилий в подпорке, линейка-имитатор 17 иолиспастов, замыкающая цепь иодвижных звеньев, с бегунком 18. Движок 3 нрижимиым винтом закреплен на линейке-имитаторе 4 подпорки, которая заканчивается указателем усилий в нодиорке. Через верхний шарнир 6 линейка-имитатор подпорки сопрягается с линейкой 7, указателем 8
значения косинуса угла наклона радиуса-вектора центра тяжести системы, линейкой-нмитатором 9 ннжней иодвески, соединенной шлицевым соединением с указателем усилий 10 в ннжней подвеске и трансиоргиром // нодвесок.
К транспортиру // нодвесок неподвижно прикреплена линейка-имитатор 12 верхней иодвески, которая шарнирно соединена с линейкой-имитатором 13 иоднимаемой конструкции.
Линейка-имитатор 9 нижней иодвески шарнирно соединена с линейкой-иамитатором 13 нодиимаемой конструкции, которая через основной шарнир 14, закрепленный неподвижно
на двустворчатой карте /, сонрягается с линейкой 7, указателем угла наклона 15 поднимаемой конструкцни, указателем 16 угла наклона раднуса-вектора центра тяжестн системы н линейкой-имитатором 17 иолиспастов с
бегунком 18.
На линейке-нмитаторе 13 поднимаемой конструкции имеется кнопка-указатель 19 центра тяжести системы.
Усилия -в подиорках для всех схем подъема характеризуются (определяются) отношением
COS(ot -}- ч)
(1)
sii:(o. + fl-bc)
где а - угол между горизонталью и осью
конструкцию;
V - угол между осью конструкции и радиусом-вектором центра тяжести; |5-угол между осью конструкции и лииней, соединяющей поворотный шарннр конструкции и шарнир креиления подпорки; Ф - угол наклона поднэркн к горизонту.
В нроцессе -подъема угла а и ф, я-вляющиеся -иеременными, для всех схем подъема связаны зависимостью:
где п - разность отметок осей поворотного шарнира конструкции и опоры -подпорки;
т - длина ПОДПорки между осями шарнира крепления к конструкции и оиоры.
Поскольку сумма углов (a + v) в процессе подъема изменяется в пределах от v до 90°, а (a+v) cos(a + v).
Такое преобразование позволяет рядом конструктивных мер совместить отсчет значений числителя и знаменателя па одной шкале, расположенной на линейке 7.
31п(а+1р+ф) отсчитывают с помошыо стрелки, которой заканчивается линейка 4, а (a + v) - с помон ью указателя 8. Указатель 8 соединен специальным шестеренчато-реечным устройством сосновным шарниром 14, обеспечи.ваюшим поворот указателя 8 па угол, соответствующий углу .поворота линейки.
Первоначальную установку указателя 8 производят поворотом шестерни у шарнира 14 с последующим ее закреплением.
Характер движеппя указателя 8 и стрелки липейки 4 цозволяет сразу же определить правильность выбора геометрических параметров схемы. Так, опережение роста значений величины, отсчитываемой указателем 8 относительно отсчитываемой стрелкой линейки 4, указывает на рост усилий в подпорках.
Для ликвидации этого явления необходимо увеличить длипу подпорки либо уменьшить угол р.
Изменение геометрических параметров схемы может быть вызвано ограничением грузоподъемности такелажных устройств либо другими заданными ограничителями. После определения геометрических параметров схемы делением значения, отсчитанного указателем 8, на значение, отсчитанное указателем 4, определяют отношение (1), по :которому находят все остальные усилия в такелажной оснастке.
Для этого получеппую величину раскладывают от оси указателя движка 3 и шарнира 6 вдоль соответствующих указателей и шкал.
Для построения графиков усилий отсчеты нроизводят при повороте «конструкции на угол, отсчитываемый указателем 15 через определенный интервал.
Па Ш1кале «арты 1 движком 3 отсчитывают положение основания подпорки, а на линейке 17 - длину полиспастов в соответствующем масштабе.
Кнопка-имитатор 19 центра тяжести служит для контроля с помощью вертикальной сетки карты } -взаим-ного расположения в процессе подъема проекции центра тяжести и основания подпорки. При неправильно выбранной длине подпорки или других элементов схемы в процессе подъема основание подпорки может оказаться между проекциями центра тяжести и основного шарпира 14. При этом «конструкция будет стремиться опрокинуться
вокруг основания подпорки, а в шарнире 14 возпикнут отрывающие усилия.
При схемах подъема, когда одновременно с изменением углов а и ф меняется расстояние между шарнирами 6 и 14, значение cos (a + v) определяют стрелкой 16, соединенной с линейкой 13, на круговой шкале карты /.
Указатель 15 связан с липейкой 13 и отсчитывает па шкале карты / угол наклона конструкции iK горизонту.
Настройка прибора. В зависимости от длины асоиструкции выбирают масштаб для ма1кетирования подъема, в соответствии с которым устанавливают линейные размеры всех элементов схемы. По расстоянию от поворотного шарнира до оси конструкции устанавливают линейку 13 относительно шарнира 14 и кнопкой 19 фпксируют центр тяжести. По величине л устанавливают линейку 2 на карте 1. На
подвижной линейке 7 между шарнирами 6 и 14 устанавливают расстояние этими шарнирами в соответствующем масштабе, на липейке 4 - размер т, на линейке 12 - длину верхней подвески, на линейке 9 - длину нижией подвески.
Движок 5 выступом соединяют с линейкой 2, а шарниром 14 - с линейкой 17.
Стрелкн /5 и 16 устанавливают относительно линейки 13, а линейку 13 устанавливают
на угол, соответствующий начальному положению конструкцни.
Стрелку 8 настраивают относительно карты 1 новоротом шестерни шарнира 14.
В процессе подъема 1конструкций могут быть
измеияемыми различные элементы кинематической цепи. После настройки прибора в зависим.ости от выбранной схемы подъема работа с прибором начинается приведением в движение того звена кинематической цепи, которое моделирует ведущее звено выбранной схемы.
Возможны следующие схемы подъема. 1. Подъем конструкций за счет сокращения расстояиия между основпым шарпнром и шарн.иром у основания подпорки. При этом для съема показаний по шкалам прибор движком 3 устанавливают в заданные промежуточные положения перемещепием в направляющем пазе рейсшины 2.
2. Подъем за счет увеличення рабочей длины подпорки. При этом для съема показапий пастроенный прибор устанавли1вают в заданные промежуточные положения перемещением линейкн-имитатора 4 подпорки в пазах движка 3, который иеобходимо удерживать от перемещепий в пазу рейсшины 2.
3.Подъем за счет уменьшения длины нижней подвески. Для этого установку прибора в заданные промежуточные положения осуществляют перемещепием линейки 7 относительно основного шарнира 14, удерж:ивая движок 3 от линейного перемещения в пазу рейсшины 2.