Изобретение относится к вычислительным устройствам, в частности, к устройствам, позволяющим выбирать оптимальные созвездия астроориентиров и кеплеровских навигационных точек в любой точке маршрута потребителя и может быть использовано для отображения и анализа элементов звездной, баллистической, навигационной обстановки в процессе планирования работы астронавигационных приборов, при решении задач штурманской подготовки, а также при решении целого ряда практических задач сферической тригонометрии, сводящихся к решению сферических треугольников в азимутальных проекциях, в частности, при определении характеристик кинематических элементов орбитальных систем.
Наиболее близким по технической сущности и достигаемому положительному эффекту к предлагаемому устройству является навигационные устройство, выполненные в виде собранных на общей оси основания, двух прозрачных подвижных дисков и двух движков, установленных по разные стороны основания. С одной стороны основания нанесена карта областей небесных сфер с градусной шкалой по окружности, на подвижном диске нанесен маршрут потребления, на движке - шкала широт. На другой стороне основания нанесены звездная карта небесной сферы и шкала звездного времени на ободке, на диске - сетка из дуг больших кругов и линий равных расстояний от узлов, а движок со шкалой широт снабжен подвижным вдоль движка прозрачным лимбом с градусной шкалой. Планшет позволяет выбирать пары астроориентиров, определять их высоты и азимуты и границы восхода и захода Солнца и Луны.
Недостатком известного устройства является его узкое использование лишь для выбора пар астроориентиров и невозможность использования для выбора рабочих созвездий подвижных ориентиров, например: кеплеровских навигационных точек (КНТ) с заданной баллистической структурой, а также при решении сферических треугольников. Техническая сущность этого планшета может быть использована для разработки устройств с расширенным диапазоном решаемых задач.
Целью предлагаемого технического решения является расширение класса решаемых задач, по сравнению с известным устройством, а именно: обеспечение возможности выбора потенциально оптимальных созвездий кеплеровских навигационных точек с заданной баллистической структурой и решение сферических треугольников в азимутальных проекциях при решении ряда задач сферической тригонометрии и определении кинематических характеристик кеплеровских точек и орбитальных систем.
Поставленная цель достигается тем, что в известное устройство, содержащее собранные на общей оси основание планшета, два прозрачных подвижных диска с графическими элементами, движок со шкалой широт и подвижный вдоль его продольной оси прозрачный лимб с круговой градусной шкалой, введены на общую ось три прозрачных концентрических подвижных диска и две параллельно соединенные с возможностью разъема круглые прозрачные пластины. Между центрами пластин на общей оси расположены пять концентрических, поворотных относительно друг друга, прозрачных дисков с нанесенными графическими элементами в азимутальных проекциях сферы: трассами кеплеровских точек, рабочими районами звезд, шкалами, сетками межвитковых сдвигов, дугами больших кругов, базовыми линиями. С внешней стороны верхней пластины основания нанесено круговое рабочее поле со шкалами долгот и времени по его границе и центром на общей с дисками оси, а также закреплен на общей оси блок для решения задач в проекциях сферы (БПС). Блок содержит движок с диаметральными шкалами широк азимутальных пароекций сферы и связанную с ним посредством соосно соединенных двух ползунков визирную линейку с подвижными, с возможностью фиксации указателями и равномерной линейной шкалой.
Движок с ввевденными в известную конструкцию первым ползуном и закрепленным на нем лимбом и связанным с ним вторым ползуном с закрепленной в нем, но с возможностью перемещения визирной линейкой, составляют вращательную пару, фиксация звеньев которой обеспечивается фиксирующими элементами. Решение задач сферической тригонометрии с использованием БПС основано на реализации с помощью его элементов основных свойств перспективно-азимутальных проекций сферы.
Такими свойствами являются (2): для гномонической проекции-изображение ортодромии в проекции прямой линией, что используется для определения промежуточных точек ортодромии при переходе в любую другую проекцию, для стереографической проекции - отображение любой окружности конечных размеров на сфере в проекции окружностью и для ортографической проекции - возможность параллельного переноса проекций точек больших и малых дуг. Таким образом, прозрачность и независимость вращения дисков с нанесенными графическими элементами позволяют проводить совместные операции над графическими элементами с разных дисков и полученный результат этих операций в виде точек, дуг больших и малых кругов, линий копировать на рабочее поле основания. И далее с помощью БПС решать сферические треугольники или другие практические задачи в проекциях сферы.
Сущность решения подобных задач с использованием БПС заключается в совмещении одной из сторон сферического треугольника, полученного на рабочем поле в определенной азимутальной проекции, с плоскостью движка, и приведении принадлежащей стороне вершины к центру движка. Для этого визирную линейку, на которой с помощью указателей зафиксирована гномоническая проекция стороны в виде отрезка прямой, перемещают вдоль продольной оси движка, зафиксированного в этом направлении с помощью фиксатора, до совпадения оси ползунов с центром движка. Искомую сторону получают на широтной шкале движка в соответствующей проекции, а угол между двумя последовательно совмещенными с плоскостью движка проекциями сторон - на шкале долгот рабочего поля. Возможность измерения дуг и углов проекций сферического треугольника, а также построение и привязка по координатам на рабочем поле треугольника заданных размеров, позволяют рассматривать с помощью БПС все случаи решения сферических треугольников. С помощью же устройства - прототипа возможно определение только дуги большого круга.
Использование разработанного устройства для выбора рабочих созвездий из системы КНТ с заданной баллистической структурой паредполагает последовательное решение таких задач, как установка опорного положения дисков в соответствии с заданным моментом времени, построение зоны радиовидимости (ЗРВ) КНТ потребителем в данной пространственно-временной области, определение положения каждой КНТ на заданный момент времени, анализ принадлежности КНТ зоне радиовидимости на момент определения местоположения потребителя, выбор рабочих созвездий КНТ в соответствии с выбранным критерием.
Для определения ЗРВ или другой зоны целевого обслуживания (ЗЦО) потребителя используется БСП. При этом реализация блоком основного свойства стереографической проекции сводится к определению центра и радиуса границы ЗРВ на меридиане потребителя и перенос его к центру рабочего поля, совпадающего с центром проекции орбитальной сферы КНТ.
Сущность решения задачи прогнозирования положения кеплеровской точки с помощью разработанного устройства заключается в смещении по часовой стрелке трассовых дисков относительно опорного положения на межвитковое расстояние, умноженное на количество прогнозируемых витков. Временное положение точки на трассе для данной широты определяется по разности долгот восходящих узлов (ВУЗ) следа точки соответственно на вращающейся и невращающейся Земле, деленной на ее угловую скорость 0,25о/мин. Положение каждой из системы КНТ и целевой кеплеровской точки (ЦКТ) в координатах "широта-долгота" на стереографической проекции сферы на прогнозируемый момент времени определяется как точка пересечения трассы кеплеровской точки, нанесенной на трассовом диске, с дугой большого круга, следа плоскости орбиты на невращающейся сфере на рабочем диске. При этом ВУЗ трассы, определяемой КНТ, совпадает с соответствующим ему опорным положением узла на рабочем поле, а для ЦКТ он совпадает с ближайшим к прогнозируемому моменту времени узлом шкалы межвитковых сдвигов, привязанным по времени относительно опорного положения. Сдвиг соответствующей дуги большого круга от указанного ВУЗ производится по шкале времени до совпадения начала дуги с прогнозируемым моментом времени. Полученные таким образом положения КНТ и ЦКТ копируются на рабочее поле.
Для дальнейшего анализа выбираются точки, попавшие в ЗРВ. Выбор потенциального оптимального созвездия из КНТ, входящих в ЗРВ потребителя, осуществляется по критерию: одна КНТ - в зените потребителя, а три других равномерно распределены по границе конуса радиовидимости. Указанная конфигурация четверки КНТ, необходимой для решения навигационной задачи, вытекает из того, что максимальный объем пирамиды, построенной на разностных градиентах, будет у правильной пирамиды, вписанной в сферический сегмент сферы радиовидимости потребителя.
Алгоритм выбора рабочего созвездия в соответствии с предложенным критерием заключается в следующем. На первом шаге выбирается КНТ Е1, имеющая по дуге большого круга минимальный угол отклонения от геоцентрической вертикали потребителя. На 2-м шаге выбирается КНТ Е2 с углом разнесения относительно выбранной на 1-м шаге точки наиболее близким к 109.5 град. На третьем шаге осуществляется выбор такой КНТ Е3, которая в совокупности с точками Е1 и Е2 дает фигуру максимального объема. На четвертом шаге выбирается такая точка Е4, которая дает пирамиду максимального объема, построенную на векторах разности попарно взятых векторов "потребитель - КНТ Ej", j=  . Длины указанных векторов разности, являющихся ребрами фигур, анализируемых на максимум объема на 3-м и 4-м шагах, определяется с помощью БСП из равнобедренного треугольника, образованного звеньями вращательной пары "визирная линейка-движок с лимбом и первым ползуном". Сторона определяется по линейной шкале визирной линейки из решения равнобедренного треугольника по двум сторонам, равным радиусу орбитальной сферы КНТ и углу между ними, определенному с помощью БПС как часть дуги большого круга, опирающуюся на искомое ребро. Объемы анализируемых на 3-м и 4-м шагах фигур вычисляются по формуле
. Длины указанных векторов разности, являющихся ребрами фигур, анализируемых на максимум объема на 3-м и 4-м шагах, определяется с помощью БСП из равнобедренного треугольника, образованного звеньями вращательной пары "визирная линейка-движок с лимбом и первым ползуном". Сторона определяется по линейной шкале визирной линейки из решения равнобедренного треугольника по двум сторонам, равным радиусу орбитальной сферы КНТ и углу между ними, определенному с помощью БПС как часть дуги большого круга, опирающуюся на искомое ребро. Объемы анализируемых на 3-м и 4-м шагах фигур вычисляются по формуле
V = 




(1) где l,m,n - стороны основания, найденные с помощью БПС
а,b,c - боковые ребра, найденные с помощью БПС
Таким образом, введенные новые признаки в их связи позволяют решить задачу выбора потребителем оптимального рабочего созвездия КНТ, тем самым расширив класс решаемых задач.
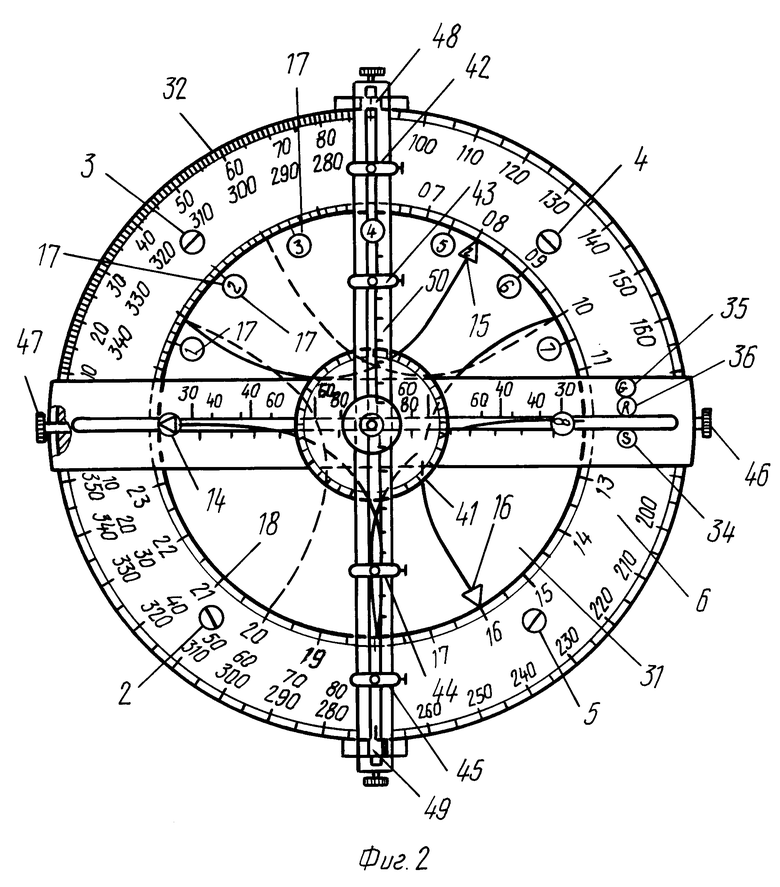
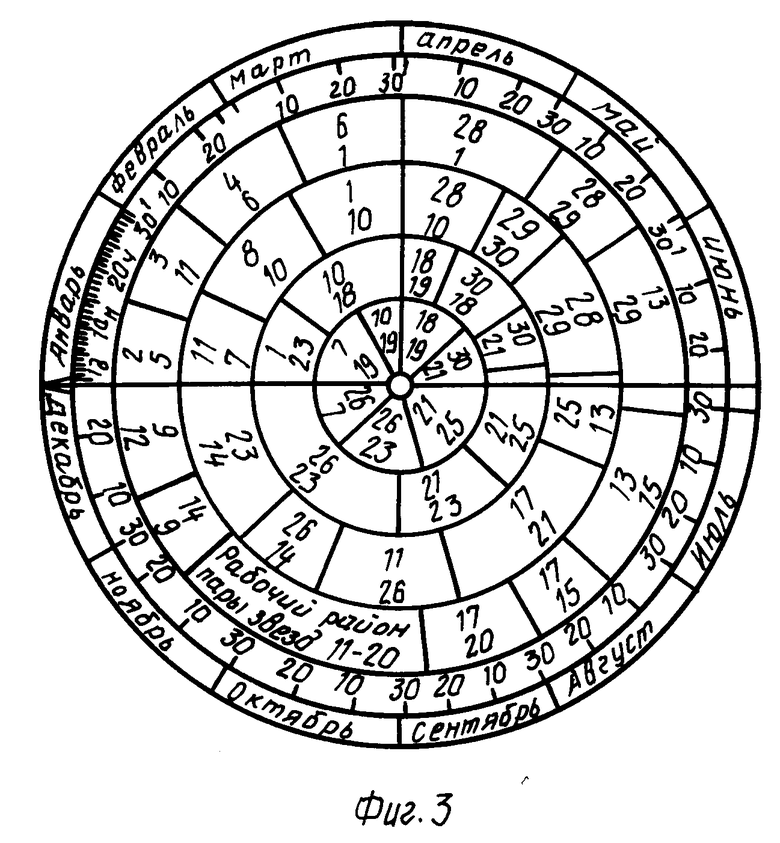
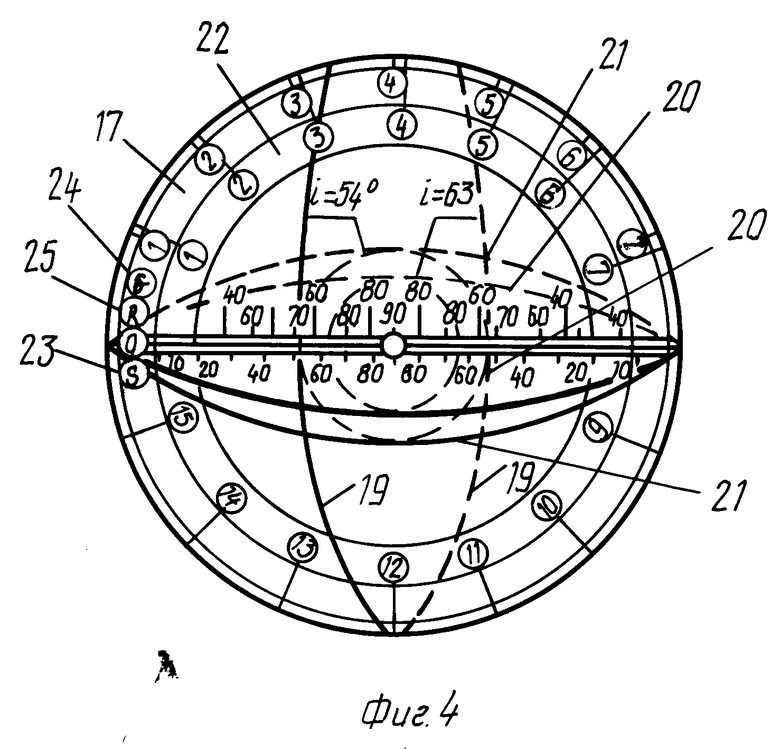
На фиг. 1 изображено предлагаемое устройство; на фиг. 2 - то же, вид спереди; на фиг. 3 - диск с рабочими районами пар звезд; на фиг. 4 рабочий диск с нанесенными графическими элементами.
Устройство (фиг.1,2) содержит основание 1, соединенное с помощью винтов 2-5 с пластиной 6. На закрепленной между центрами основания 1 и пластины 6 общей оси 7 расположены пять одинаковых по размеру концентрических дисков 8-12, имеющих возможность поворота вокруг оси 7. На каждом диске имеется диаметральная базовая линия. Диски 9-12 с нанесенными графическими элементами в стереографической проекции выполнены из прозрачного материала, а на съемном диске 8 с разных сторон наклеены карты северного и южного полушарий Земли с координатной сеткой стереографической проекции, полюса которых совмещены с осью 7. Возможность смены сторон диска 8 с картами полушарий обеспечена радиальной прорезью на диске и фиксирующей защелкой 13, обеспечивающей плотное прилегание диска 8 к оси 7. На прозрачном диске 9 (фиг. 3) в стереографической проекции небесной полусферы, полюс мира которой совпадает с осью 7, нанесены координаты и рабочие районы пар звезд (разным цветом для северной и южной небесной полусферы). Рабочие районы расчитаны так, чтобы разность азимутов выбранной пары составляла 90±30о, а высота была в пределах от +10о до +70о. Диск служит для выбора пар астроориентиров.
На прозрачном диске 10 в стереографической проекции нанесены трассы 14-16 КНТ из трех разнесенных на 120о плоскостей. Баллистическая структура системы из 24 КНТ следующая: в трех плоскостях с наклонением 63о, разнесенных по долготе экватора на 120о, размещены по 8 КНТ с периодом следования 1,5 ч или 45о. Восходящие узлы 8 КНТ из одной плоскости нанесены с интервалом 22,5о по окружности рабочего диска 12 на шкале узлов 17. Параметры орбиты КНТ: наклонение 63о, период обращния 12 ч, орбита круговая высотой 20 тыс. км. Система считается динамически устойчивой. Привязка системы по времени осуществляется по шкале времени 18. На диске 11 в стереографической проекции нанесена трасса целевой кеплеровской точки 19. На рабочем диске 12 нанесены дуга большого круга 20 с углом наклона 63о кеплеровской навигационной точки, дуга большого круга 21 с наклонением, равным наклонению орбиты целевой кеплеровской точки, шкала межвитковых сдвигов 22, угловое расстояние между соседними узлами котроой равно произведению драконического периода обращения на угловую скорость Земли, минус вековой уход долготы ВУЗ за виток. Кроме указанных графических элементов на рабочем диске нанесены совмещенные по диаметру базовой линии градусные деления шкал широт 23-25, соответственно, стереографической, гномонической и ортографической проекций сферы. Причем, деление 90о всех шкал совпадает с центром оси 7 и полюсом проекций, а оцифровка и градусные деления шкалы 23 и совмещенных шкал 24-25 расположены по разные стороны диаетра диска. На крепежном винте 2 имеются винтовые стопоры 26-30, обеспечивающие фиксацию дисков 8-12. На основании 1 нанесено круговое рабочее поле 31 с диаметральной базовой линией, центр которого совпадает с осью 7, а его диаметр равен диаметру дисков 8-12. По границе рабочего поля нанесена круговая градусная шкала 32 от 0 до 360о, совпадающая со шкалой долгот на карте полушария диска 8, а каждое деление оцифровано двумя цифрами, отличающимися на 360о, причем, деление (0,360о) и начало отсчета шкалы 18 совпадают с базовой линией. Рабочее поле 31 служит для отображения маршрута движения потребителя, копирования графических элементов с дисков и на диски в силу их прозрачности.
На оси 7 с внешней стороны пластины 6 закреплен диаметральный движок 33 с прорезью по диаметру и двумя направляющими, параллельными прорези. Движок выполнен из прозрачного материала и имеет возможность поворота вокруг оси 7. На движке нанесены совмещенные по диаметральной оси шкалы широт 34-36, соответственно стереографической, гномонической и ортографической проекцией сферы с градусными делениями от 0 до 90о, причем деление 90о у всех шкал совпадает с центром оси 7. В совмещенном положении базовой линии рабочего диска 12 и диаметральной оси движка 33 деления шкал 23-25 совпадают с одноименными деленияи шкал 34-36 перспективно-азимутальных проекций. На движке 33 расположен первый ползунок 37, выполненный в виде цилиндра с двумя пазами на нижнем основании для направляющих движка, благодаря которым у него имеется возможность перемещения вдоль диаметральной оси движка. В центре верхнего основания ползуна 37 одним концом ввинчена полая ось 38, на которой закреплен второй ползун 39, выполненный в виде цилиндра с прорезью для визирной линейки 40 и сквозным отверстием под ось 38, имеющей возможность поворота вокруг оси 38 и относительно первого ползуна 37. Визирная линейка 40 с продольной прорезью для перемещения в ней оси 38 составляет вращательную пару с ползунком 37 и движком 33, угол между звуньяи которой может быть измерен с помощью круговой градусной шкалы лимба 41, закрепленного на ползунке 37, а 0 отсчета его шкалы совпадает с диаметральной осью движка 33. На линейке 40 закреплены скользящие бегунки-указатели 42-45, по два с разных сторон от оси 38. На концах движка 33 имеются винтовые стопоры 46-47, а на визирной линейке закреплены подвижные фиксирующие элеенты 48-49, обеспечивающие фиксацию в любом положении, соответственно, движка 33 и визирной линейки 40 относительно пластины 6 как звеньев вращательной пары. На визирной линейке 40 нанесена линейная равномерная шкала 50 на 100 делений, используемая для построения и решения линейных треугольников.
С помощью предлагаемого устройства может быть решен целый ряд навигационных задач, связанных с выбором для потребителя рабочих созвездий навигационных точек, например, астроориеантиров, кеплеровских навигационных точек, ориентиров на поверхности Зели. Сущность решения таких задач заключается в определении зоны навигационного обслуживания, установлении факта попадания навигационной точки или потребителя в эту зону на заданный момент времени, выборе в соответствии с выбранным критерием и ограничениями созвездий навигационных точек. Во многих случаях решение подобных задач сводится к решению сферических треугольников, которые решаются с помощью БПС. Работу устройства демонтстрирует решение следующей задачи. Для потребителя на поверхности Земли со сферическими координатами ϕпи λп на момент времени τпопределить потенциально оптимальное созвездие из 4-х КНТ, принадлежащих орбитальной системе КНТ, баллистическая структура которой представлена на трассовом диске 10 и графическии элементами на рабочем диске. Восходящие узлы ведущих точек из 3-х орбитальных плоскостей, сдвинуты на 120о, равны
λ1(τ1), λ2(τ1+8h), λ3(τ1+16h), где τ1- московское время ВУЗ-а, ведущей точки из первой орбитальной плоскости.
Орбитальная система считается динамически устойчивой.
Работа устройства заключается в последовательном выполнении следующих операций. Сначала проводят юстировку прибора. Для этого совмещают базовые линии всех дисков 8-12 с базовой линией рабочего поля, а шкалы широт 34-36 движка 33 соответствующими шкалами 23-25 рабочего диска 12. Лимб 41 перемещают в центр общей оси 7, а визирную линейку 40 выставляют вдоль диаметральной оси движка 33 так, чтобы ее центр совпадал с осью 7 и центром лимба 41, а деление "100" на шкале - с окружностью границы рабочего поля. В полученном положении базовые линии дисков и одноименные шкалы широт и долгот должны совпадать. После этого выставляется опорное положение дисков. Диск 8 сдвигается до совпадения меридиана потребителя λпс временной меткой τпна шкале времени 18. Положение диска фиксируется с помощью стопора 26, а точка потребителя копируется на рабочее поле 31. Относительно этой точки с помощью БПС строится ЗРВ потребителя со сферическим радиусом 69о, соответствующим минимальному углу места 7о. Для этого базовая линия с широтной шкалой на рабочем диске выставляется по меридиану потребителя и от широты потребителя фиксируются точки ϕп±34,5о, дающие диаметр окружности ЗРВ. Разделив с помощью линейной шкалы 50 отрезок проекции пополам, находим на меридиане потребителя центр и радиус ЗРВ, и циркулем очерчиваем окружность ЗРВ на рабочем поле. Далее устанавливается опорное положение трассового диска 10. Для этого ВУЗ базовой точки 14 из первой плоскости сдвигается по шкале 18 до совпадения с меткой τ1.ВУЗ-ы точек 15-16 займут на шкале времени положения (τ1+8) и (τ1+16). ВУЗ-ы остальных точек из 1 плоскости, смещенные относительно друг друга на 1,5 ч, определяются по шкале узлов 17, нулевой узел которой совпадает с меткой τ1 . Аналогичные операции проделываются для КНТ из 2-х других плоскостей. Полученные ВУЗ-ы всех 24 КНТ копирируются на границу рабочего поля.
Следующим шагом будет определение положения каждой из 24 КНТ относительно вращающейся Земли на момент τп. Для этого начало любой из ветвей трассы на диске 10 и начало стереографической проекции дуги большого круга 20 на рабочем диске 12 совмещают с первым узлом КНТ, нанесенным на рабочем поле. Вращая диск 12 с дугой 20 по часовой стрелке до совпадения начала дуги с временной меткой на τпшкале времени, в пересечении ветвей следа КНТ на дисках 10 и 12 получаем положение КНТ на момент τп. В случае попадания в ЗРВ потребителя, полученная точка копируется на рабочее поле. Аналогичные операции совершаются над всеми 24 точками.
Для дальнейшего анализа выбираются только попавшие в ЗРВ точки, и с помощью БПС находятся угловые расстояния по дуге большого круга между потребителем и каждой КНТ, принадлежащей ЗРВ. Для этого решается типовая задача определения в азимутальных проекциях углового расстояния между двумя точками по дуге большого круга. Решение типовой задачи рассмотрим на примере определения угла разнесения между потребителем и КНТ.
Базовая линия рабочего диска 12 выставляется по меридиану потребителя на долготной шкале карты зафиксированного диска 8 и диск фиксируется стопором 30. Движок 33 совмещается с меридианом λ1первой КНТ, стереографическая проекция которой переводится в гномоническую проекцию по шкале 35 движка, и полученная проекция точки помечается на рабочем поле 31. Аналогичный перевод в гномоническую проекцию осуществляется по шкале 24 для точки потребителя ϕпДалее через полученные точки устанавливается положение визирной линейки 40 и фиксируется элементами 48-49. Перпендикулярно линейке 40 по шкале лимба 41 выставляется ось движка 33, фиксируемая в этом положении стопорами 46-47. Зафиксировав по линейке 40 с помощью указателей 43-44 отмеченные на рабочем поле точки (ϕп,λп)и (ϕ1,λ1), но переведенные по шкале 25 рабочего диска в ортографическую проекцию, визирную линейку после расфиксации элементов 48-49, но с сохранением ее положения относительно центра лимба 41, совмещают с продольной осью движка 33, и далее центр лисба 41 совмещают с осью 7. Угловые положения указателей 43-44 на шкале 36 движка 33 в сумме дают искомое значение угла дуги большого круга. Далее ортографическая прокция точки потребителя совмещается с осью 7, полюсом проекции, из которого проводится окружность ЗРВ с угловым радиусом 34,5о в ортографической проекции. Направление переноса точки потребителя в центр рабочего поля на ось 7 по меридиану потребителя фиксируется базовой линией рабочего диска с помощью стопора 30. В зафиксированном направлении осуществляется параллельный перенос в ортографической проекции по дугам малых кругов всех КНТ, принадлежащих ЗРВ. Для реализации этой операции визирная линейка 40 устанавливается параллельно базовой линии рабочего диска последовательно через каждую КНТ и фиксируется с помощью элементов 48-49. Передвигая движок 33 до совмещения деления на его ортографической шкале 25, соответствующего величине дуги большого круга от потребителя до заданной КНТ, с установленным направлением визирной линейки, находим положение КНТ в результате параллельного переноса, которое фиксируется на рабочем поле.
Реализация алгоритма выбора потенциально оптимального созвездия. На первом шаге с помощью ортографической шкалы 25 движка 33 путем его поворота выбирается КНТ Е1 с минимальным угловым расстоянием от точки потребителя, совпадающей с осью 7. На 2-ом шаге решается типовая задача по определению углового расстояния между Е1 и остальными навигационными точками. Из полученных значений выбирается КНТ Е2 с максимальным углом разноса между Е1 и Е2. На 3-ем шаге анализируются КНТ наиболее близкие к границе окружности ЗРВ и одновременно равномерно разнесенные относительно точки Е2 и между собой на углы, близкие к 120о. Анализ производится по шкале 32 или круговой шкале лимба 41. Точек, удовлетворяющих обоим критериям, может быть несколько. Поэтому вычисляются объем фигур, построенных на анализируемых точках в совокупности с ранее выбранными точками Е1 и Е2, и выбираются такие КНТ Е3 и Н4, которые дают максимальный объем образованной на них пирамиды. Точки Е1 - Е4 принадлежат орбитальной сфере радиуса 20 тыс.км. Половина шкалы 50 на визирной линейке 40 соответствует орбитальному радиусу, принятому за 100 условных единиц. Длины ребер пирамиды определяются с помощью БПС путем решения линейных треугольников. Для их определения движок 33 совмещается с базовой линией рабочего поля и вдоль его продольной оси перемещается лимб 41 с перпендикулярно выставленной визирной линейкой до пересечения с границей окружности по концам его дуги, соответствующим угловому расстоянию по дуге большого круга между точками Ei и Ej, i≠j˙,i,j= . Длина хорды этой дуги, измеряемая по шкале 50 визирной линейки, дает длину искомого ребра. На 4-ом шаге по формуле (1) вычисляются объемы фигур, построенных на точках Е1. . . Е4 и выбираются те точки Е3, Е4, которые дают максимальный объем. С помощью БПС могут быть определены параметры наведения из точки потребителя на КНТ выбранного созвездия. Для этого движок 33 выставляется по меридиану потребителя и с помощью шкалы 50 визирной линейки на нем делается отметка, соответствующая высоте потребителя в условных единицах относительно радиуса орбитальной сферы, равная
. Длина хорды этой дуги, измеряемая по шкале 50 визирной линейки, дает длину искомого ребра. На 4-ом шаге по формуле (1) вычисляются объемы фигур, построенных на точках Е1. . . Е4 и выбираются те точки Е3, Е4, которые дают максимальный объем. С помощью БПС могут быть определены параметры наведения из точки потребителя на КНТ выбранного созвездия. Для этого движок 33 выставляется по меридиану потребителя и с помощью шкалы 50 визирной линейки на нем делается отметка, соответствующая высоте потребителя в условных единицах относительно радиуса орбитальной сферы, равная
H · 100 где Rn - радиус потребителя относительно центра Земли.
· 100 где Rn - радиус потребителя относительно центра Земли.
В полученную точку смещается центр лимба 41, а визирная линейка устанавливается в точке на границе рабочего поля, соответствующей углу разноса потребителя и наводимой КНТ по дуге большого круга, найденного ранее. По шкале лимба, в точке пересечения ее визирной линейкой, снимается искомый угол места, отсчитанный от деления 90о. Азимуты КНТ и потребителя вычисляются по разности их долгот относительно окружности ЗРВ потребителя, приведенной к центру рабочего поля на оси 7, с помощью шкалы лимба 41.
При выборе пар астроориентиров для данного района потребителя необходимо цифру, соответствующую дате наблюдения на диске 9, совместить с 0 шкалы времени 18. Пару астроориентиров выбирают путем проецирования на диск 9 вертикали точки потребителя. Для определения навигационных параметров берут ту пару астроориентиров, в область которых спроецирована вертикаль потребителя. В дальнейшем они используются для определения навигационных параметров потребителя.
Таким образом, технико-экономический эффект от практического использования устройства заключается в расширении класса решаемых задач.
С помощью предлагаемого устройства возможно решение следующим задач:
- возможность выбора потенциально оптимальных созвездий КНТ с заданной баллистической структурой;
- выбор пар астроориентиров для решения навигационных задач, в том числе, для кеплеровских точек;
- решение практических задач сферической тригонометрии, сводящихся к решению сферических треугольников в азимутальных проекциях;
- решение линейных треугольников;
- определение кинематических характеристик кеплеровских точек, в частности, прогнозирование положения кеплеровской точки на заданный момент времени и решение обратной задачи, определение факта попадания кеплеровской точки в зону целевого обслуживания, взаимовидимость кеплеровских точек, определение параметров наведения для потребителей и кеплеровских точек между собой;
- отображение и анализ элементов звездной, баллистической и навигационной обстановки на основе решения перечисленных выше задач.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КИНЕМАТИЧЕСКИХ ХАРАКТЕРИСТИК КЕПЛЕРОВСКИХ ТОЧЕК И РЕШЕНИЯ ЗАДАЧ В ПРОЕКЦИЯХ СФЕРЫ | 1990 |
|
RU2022357C1 |
| Дериватор | 1976 |
|
SU610684A1 |
| НАВИГАЦИОННЫЙ ПЛАНШЕТ ДЛЯ ВЫБОРА ПАР СВЕТИЛ | 1966 |
|
SU184463A1 |
| СПОСОБ ПОСТРОЕНИЯ АСТРОИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2016 |
|
RU2641515C2 |
| Чертежный прибор для построенияпРяМОугОльНыХ АКСОНОМЕТРичЕСКиХизОбРАжЕНий | 1978 |
|
SU799967A1 |
| УСТРОЙСТВО ДЛЯ РАСШИФРОВКИ ОСЦИЛЛОГРАММ | 1973 |
|
SU408152A1 |
| ВЫЧИСЛИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ | 1991 |
|
RU2011223C1 |
| Чертежный прибор | 1979 |
|
SU859220A1 |
| Вычислительный прибор для определения установочных геометрических параметров | 1980 |
|
SU935974A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВЗАИМНОГО ПОЛОЖЕНИЯ ДИСКОВ В СОБРАННОМ РОТОРЕ | 1973 |
|
SU370372A1 |
Изобретение служит для выбора оптимальных созвездий астроориентиров и кеплеровских навигационных точек на маршруте потребителя. Может быть использовано для отображения и анализа элементов звездной, баллистической и навигационной обстановки, при решении задач штурманской подготовки, а также при решении практических задач сферической тригонометрии в азимутальных проекциях сферы. Сущность изобретения: устройство содержит основание 6, пять прозрачных дисков 8 - 12, поворотных относительно друг друга, установленных на общей оси 7, на диски и основание нанесены графические элементы: карты полушарий Земли, трассы кеплеровских точек, рабочие районы пар звезд, шкала, сетки межвитковых сдвигов, дуги больших кругов сферы, движок со шкалами, лимб 41, визирную линейку 40. 4 ил.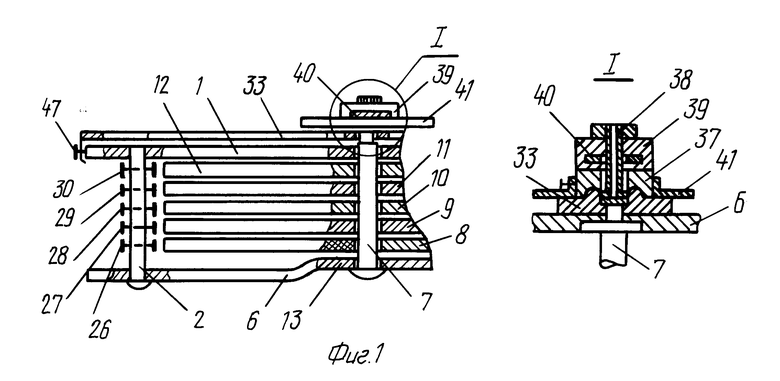
УСТРОЙСТВО ДЛЯ РЕШЕНИЯ НАВИГАЦИОННЫХ ЗАДАЧ, содержащее установленные на общей оси прозрачное основание с градусной шкалой на ободке, два диска и движок, выполненные прозрачными, на движке диаметрально расположена шкала широт в азимутальных проекциях сферы с полюсами сферы на общей оси, движок снабжен подвижным вдоль его продольной оси прозрачным лимбом с градусной шкалой, причем диски и движок установлены с возможностью вращения, отличающееся тем, что в него дополнительно введены визирная линейка с линейной шкалой, снабженная подвижными с возможностью фиксации указателями, соосно расположенные первый и второй ползунки, три диска, выполненные прозрачными и установленные на общей оси с возможностью вращения, причем все прозрачные диски снабжены фиксаторами положения, на основании соосно с прозрачными дисками по границе прозрачных дисков расположено рабочее круговое поле со шкалами долгот и местного времени, на первом диске, выполненном съемным, нанесены с разных сторон карты полушарий Земли в стереографической проекции с полюсами на общей оси, на втором диске расположены в стереографической проекции карта небесной полусферы с полюсом мира на общей оси, координаты и рабочие районы пар звезд, выполненные разным цветом для северной и южной полусфер, на третьем и четвертом дисках в соответственно с баллистической структурой нанесены трассы кеплеровских навигационных и целевых точек соответственно, на пятом диске расположены дуги больших кругов следов плоскостей орбит кеплеровских навигационных и целевых точек, Солнца и Луны, круговые шкалы узлов межвитковых сдвигов кеплеровских точек, совмещенные по диаметральной базовой линии шкалы широт в стереографической, гномонической и ортографической проекции сферы с полюсами на общей оси, первый ползунок, на котором установлен с возможностью вращения лимб, расположен на движке с возможностью перемещения вдоль его продольной оси, второй ползунок, на котором установлена визирная линейка с возможностью перемещения внутри его, установлен с возможностью вращения относительно первого ползунка, визирная линейка и движок снабжены фиксаторами положения.
| 0 |
|
SU171122A1 | |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
