Изобретение относится к транспортным средствам и может быть использовано в двигательных (тяговых) системах для перемещения объектов, в частности космических, в пространстве.
Наиболее близким способом к предлагаемому является способ перемещения объекта в пространстве, включающий создание на объекте магнитного поля и перемещение в этом поле тел, механически связанных с объектом.
Наиболее близким устройством к предлагаемому является устройство для перемещения объекта в пространстве, содержащее источник магнитного поля, механически связанный с объектом тела и средства для перемещения этих тел в магнитном поле.
Известные способ и устройство основаны на принципе электромагнитного ускорения внешней среды с дипольной микростpуктурой без ее ионизации и могут использоваться для создания тяги как на Земле, так и в космосе.
Недостатками известных способа и устройства являются ограниченная область применения (там, где есть подходящая среда) и относительно высокие энергозатраты на генерацию необходимых возбуждающих электромагнитных полей.
Целью изобретения является расширение области применения и снижение энергозатрат.
Это достигается тем, что в способе перемещения объекта в пространстве, включающем создание на объекте магнитного поля и перемещение в этом поле тел, механически связанных с объектом, магнитное поле создают с векторным потенциалом, ориентированным под углом 90-270о к космологическому электромагнитному векторному потенциалу, а по меньшей мере часть тел перемещают в области пониженных значений потенциала, равного сумме указанных выше векторных потенциалов. Кроме того, в устройстве для перемещения объекта в пространстве, содержащем источник магнитного поля, механически связанные с объектом тела и средства для перемещения этих тел в магнитном поле, источник магнитного поля выполнен в виде тороидальной токовой обмотки, тела размещены во внутренней полости обмотки, а средства для перемещения тел выполнены в виде механизмов изменения положений тел относительно поверхности обмотки. Кроме того, в предлагаемом устройстве механизмы изменения положений тел могут быть выполнены в виде равномерно размещенных вдоль поверхности обмотки тяг, жестко связанных с корпусом объекта и снабженных приводами их выдвижения-уборки вдоль радиальных направлений образующей окружности торовой поверхности обмотки.
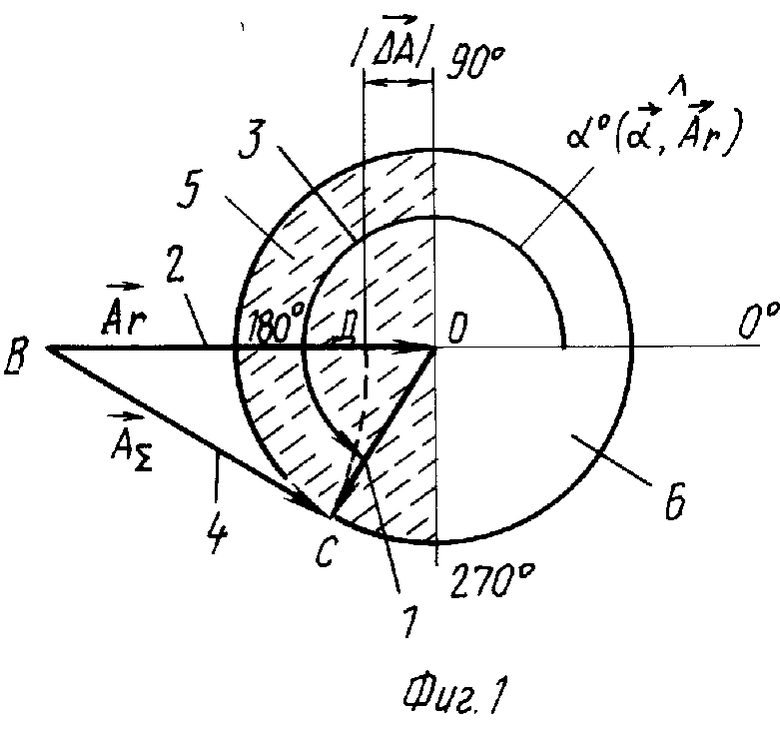
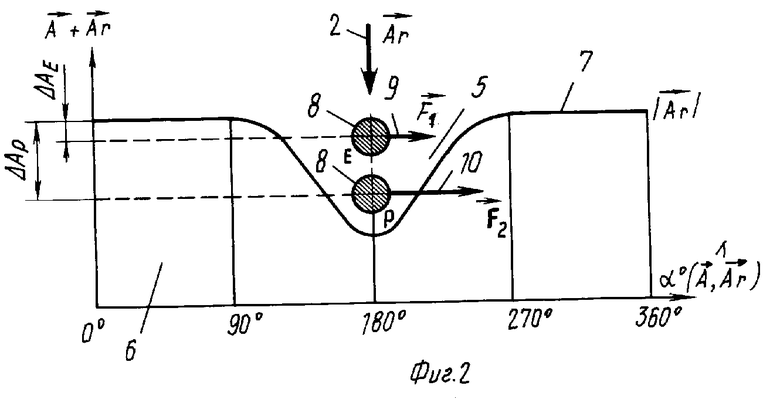
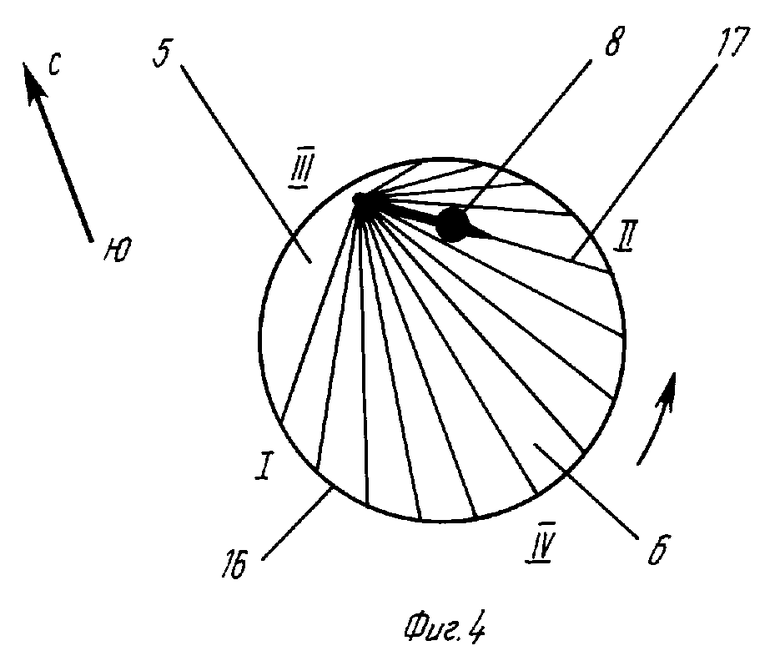
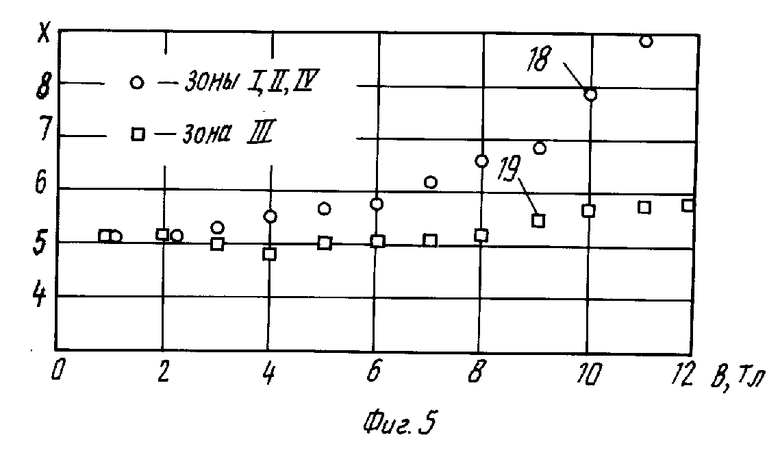
На фиг. 1 приведена принципиальная схема векторных потенциалов и областей пространства при осуществлении предлагаемого способа; на фиг. 2 - график, иллюстрирующий характер распределения в пространстве модуля суммарного векторного потенциала при осуществлении способа и сил, воздействующих на перемещаемый элемент объекта при изменении его положения в области пониженного суммарного потенциала; на фиг. 3 - конструктивная схема устройства; на фиг. 4 - схема, характеризующая условия проведения исследований на установке, использующейся при экспериментальной проверке эффекта появления и воздействия силы на массу в области уменьшенного суммарного векторного потенциала; на фиг. 5 - график изменения положения перемещающегося в пространстве объекта на установке по фиг. 4.
Введены следующие основные обозначения:
1 - вектор-потенциал (AVec) магнитного поля объекта;
2 - космологический вектор-потенциал (AVecг);
3 - угол (α) между вектор-потенциалом (1) магнитного поля объекта и космологическим вектор-потенциалом (2);
4 - суммарный вектор-потенциал (AVecΣ);
5 - область пространства с уменьшенным суммарным потенциалом;
6 - область пространства с постоянным суммарным потенциалом, равным космологическому вектор-потенциалу AVecг;
7 - график зависимости величины модуля суммарного потенциала (AVec+ AVecг) от угла α(поз.3) между этими векторами;
8 - масса тела, перемещаемого в область 5 пониженного суммарного потенциала;
9 - вектор FVec1 силы, действующей на тело 8 при его расположении в точке Е области 5 с пониженным суммарным потенциалом 7;
10 - вектор FVec2 силы, действующей на тело 8 при его расположении в точке P области 5.
Устройство содержит источник магнитного поля, выполненный в виде тороидальной токовой обмотки 11, во внутренней полости которой (в областях 5, 6) расположены тела 8, закрепленные на выведенных из внутренней полости тороида 11 и жестко скрепленных с корпусом 12 объекта тягах 13, размещенных равномерно по торовой поверхности (на фиг. 3 показаны только два поперечных сечения тороида) и снабженных механизмами 14 их перемещения в радиальных направлениях образующей окружности тора (позицией 15 на фиг. 3 обозначен вектор FVec силы, действующей на одно из тел 8 силы той же физической природы, что и силы FVec1 , FVec2 ).
При экспериментальном исследовании эффекта возникновения силы, воздействующей на массу 8, размещаемую в области 5 пониженного суммарного потенциала, используется создающий магнитное поле соленоид 16 (фиг. 4), во внутреннюю область которого вводится в различных зонах (I, II, III и IV) масса 8, закрепляемая на крутильных весах (нержавеющая проволока диаметром 0,1 мм и длиной 1600 мм + шелковая нить длиной 70 мм). Ось крутильных весов перпендикулярна плоскости чертежа и обозначена на фиг. 4 точкой 01.
К нижнему концу нити из нержавеющей стали подвешен цилиндрический груз (масса - поз. 8, m = 26-30 г) таким образом, что его ось параллельна нити и находится от нее на расстоянии 10 мм. Чувствительность весов не хуже 20 мкН/град.
Позицией 17 на фиг. 4 отмечены направления от оси поворота 01 к стенке соленоида 16, регистрирующиеся при эксперименте и соответствующие координате Х на графике фиг. 5. Стрелка С-Ю показывает направление магнитного поля Земли.
На фиг. 5 - представлены экспериментальные результаты, полученные при исследовании эффекта в зонах I, II и IV (точки 18), где отсутствует уменьшение суммарного потенциала (соответствуют области 6 на фиг. 1-3), и в зоне III (точки 19), где уменьшение суммарного потенциала имеет место (соответствует области 5 на фиг. 1-3).
Перемещение объекта в пространстве осуществляется на базе следующих принципов. На объекте создают магнитное поле, вектор-потенциал AVec которого направляют под углом α- в диапазоне углов 90о< α<270о - к космологическому электромагнитному векторному потенциалу, который представляется одной из фундаментальных констант и направление которого одно и то же в окрестности Солнца и ближайших звезд. Вследствие этого в некоторой зоне объекта, охватывающей часть элементов его конструкции, создается область 5 (заполнена на фиг. 1 и 3 штриховыми линиями, а на фиг. 2 показана в виде потенциальной ямы функции 7) с пониженным суммарным потенциалом.
В этой области возникает сила FVec, действующая на тела (массы) 8, располагающиеся внутри нее (выталкивающая тела из области 5); телами 8 могут служить некоторые элементы конструкции объекта. Перемещая в области 5 пониженного суммарного потенциала 7 элементы 8 конструкции тела, осуществляют изменение силы FVeci (поз. 9, 10), поскольку, как видно из фиг. 2, это перемещение приводит к изменению величины градиента Δ|AVec|: силе FVec1 в точке Е области 5 соответствует изменение модуля космологического векторного потенциала, равное ΔАЕ, а силе FVec2 в точке P- ΔAp; т. к. ΔAE< ΔAp, то | FVec1|< |FVec2|.
Аналогичное влияние на силу, воздействующую на объект, оказывает изменение величины векторного потенциала 1 магнитного поля объекта, приводящее также к увеличению или уменьшению ΔА.
Суммарное изменение положения тел 8, величины векторного потенциала 1 объекта и его направления (угла α- поз. 3) позволяет осуществлять точно регулируемое управление движением объекта (тягой), т. е. его перемещение в требуемом направлении пространства с требуемой скоростью.
Поскольку величина суммарного потенциала не может превышать значения AVecг (космологический векторный потенциал AVecг может быть только уменьшен), векторный потенциал 1 магнитного поля объекта (AVec) должен быть направлен навстречу под углом 90-270о к космологическому векторному потенциалу 2 (AVecг). В противном случае невозможно создать область 5 пониженного суммарного потенциала 4, в которой реализуется эффект воздействия на массы в данной области (во всем остальном пространстве величина суммарного потенциала 7 постоянна и равна (|AVecг|- см. фиг. 2).
Как видно из фиг. 1, предельные величины углаα определяются условием наличия компоненты от AVec, направленной навстречу AVecг.
В технических системах на данной стадии их развития ΔA/Aг ≈10-5 для реализации способа достаточно обеспечить отклонение углаα от границ внутрь указанного диапазона 90-270о всего лишь на ≈10-5 радиан (10-4 град.).
Таким образом, выполнение операций дает возможность реализовать перемещение объекта вследствие отталкивания его элементов от области физического вакуума, в которой создан уменьшенный суммарный электромагнитный векторный потенциал.
При этом не нарушается следствие из третьего закона Ньютона, говорящее о том, что центр масс системы нельзя сдвинуть за счет внутренних сил, так как при осуществлении предлагаемого процесса перемещения объекта происходит обмен импульсом между объектом и физическим вакуумом Галактики.
Устройство (фиг. 3) для реализации способа работает следующим образом.
Путем запитки током тороидальной обмотки 11 на объекте создают магнитное поле, вектор-потенциал 1 которого вблизи обмотки совпадает с направлением витков обмотки 11.
При этом, если, например, первоначально плоскость поперечной симметрии тороида 11 располагается перпендикулярно космологическому векторному потенциалу 2 (фиг. 3), то в периферийных областях внутренней полости тороидальной обмотки 11 создается область 5 с пониженным суммарным потенциалом и центральная область 6, где потенциал не изменяется.
Для создания тяги на объекте в пространстве во внутренней полости тороида 11 в области 5 создают несимметричное расположение вещества путем перемещения тел 8 тягами 13, приводимыми в движение механизмами 14 (например, линейными электро- или пневмомоторами). Тяги 13 через механизмы 14 их перемещения жестко скреплены с корпусом 12 объекта, вследствие чего любые усилия, действующие на тела 8, передаются объекту в целом. При расположении тел 8, показанном на фиг. 3 (в одной части тороида массы, попадающие в область 5, максимально приближены к обмотке тороида, а в противоположной части аналогичные массы приближены к оси тороида), вследствие наличия разницы в величинах возникающей при этом силы FVec суммарная результирующая сила тяга приводит к перемещению (ускорению) объекта. Изменяя механизмами 14 и тягами 13 расстояние тел 8 от оси тороида 11 (т. е. меняя модуль космологического векторного потенциала (AVecг) на различные величины ΔA), получают требуемые значения и направления результирующей силы, перемещающей объект в пространстве.
Экспериментальную проверку и подтверждение наличия эффекта отталкивания материальных тел от области физического вакуума, в которой обеспечено уменьшение суммарного векторного потенциала (AVec+AVecг) (поз. 7 фиг. 3), проводят путем регистрации отклонения (поворота на крутильных весах) массы 8 (фиг. 4) относительно стенки цилиндрического соленоида 16. Положение в пространстве соленоида 16 такое, что ось 01 крутильных весов располагается поочередно в различных зонах соленоида: в зоне III, где направление вектор-потенциала магнитного поля соленоида 16 имеет существенную компоненту, направленную навстречу космологическому векторному потенциалу AVecг (что соответствует области 5 фиг. 1-3), и в других зонах внутренней полости соленоида 16 (I, II, IV), где эта компонента мала и соответствующая сила отсутствует. В качестве материала массы 8 используют слабые парамагнетики, на которые действует сила притяжения к обмотке (к стенке) соленоида 16 (β-олово).
Результаты экспериментов показали (фиг. 5), что вследствие заметного парамагнетизма материала массы 8, она во всех зонах притягивается к обмотке, но в зоне III, где направление магнитной силы противоположно направлению действия силы, возникающей в результате уменьшения суммарного потенциала, это притяжение существенно меньше (точки 19), чем в зонах I, II, IV, где уменьшение суммарного потенциала /ΔA/ слабое или вообще отсутствует (точки 18). Разность ординат точек 18 и 19 качественно характеризует возникающую силу и ее зависимость от величины векторного потенциала магнитного поля объекта.
В зоне экспериментов зарегистрировано также изменение величины искомой силы FVec в зависимости от времени, связанное с изменением углаα из-за суточного вращения Земли и обращения ее вокруг Солнца.
Таким образом, проведенные исследования подтверждают наличие сил, возникающих при целенаправленном изменении суммарного векторного потенциала, и соответственно реализуемость заложенных в изобретении физических принципов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ГЕНЕРИРОВАНИЯ МЕХАНИЧЕСКОЙ ЭНЕРГИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1994 |
|
RU2091976C1 |
| ГЕНЕРАТОР МЕХАНИЧЕСКОЙ ЭНЕРГИИ (ВАРИАНТЫ) | 1996 |
|
RU2132109C1 |
| СПОСОБ ПЕРЕМЕЩЕНИЯ ОБЪЕКТА В ПРОСТРАНСТВЕ | 1992 |
|
RU2082900C1 |
| СПОСОБ НАВИГАЦИИ КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2132042C1 |
| СПОСОБ ГЕНЕРИРОВАНИЯ МЕХАНИЧЕСКОЙ ЭНЕРГИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2121602C1 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2099875C1 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1994 |
|
RU2106748C1 |
| СПОСОБ ПОЛУЧЕНИЯ ЭНЕРГИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2147696C1 |
| СПОСОБ УПРАВЛЕНИЯ СЛАБЫМ ВЗАИМОДЕЙСТВИЕМ ЭЛЕМЕНТАРНЫХ ЧАСТИЦ ВЕЩЕСТВА | 1994 |
|
RU2089953C1 |
| СПОСОБ ПОЛУЧЕНИЯ ТЕПЛОВОЙ ЭНЕРГИИ И УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2251629C1 |
Использование: в транспортных средствах, в частности космических, в двигательных системах для перемещения различных объектов в пространстве. Сущность изобретения: на борту некоторого объекта создают магнитное поле с векторным потенциалом 1, ориентированным под углом 90 - 270° к космологическому векторному потенциалу 2, чем обеспечивается возникновение областей 6 с постоянным и областей 5 с пониженным значениями суммарного векторного потенциала, например, внутри установленной на объекте тороидальной токовой обмотки 11. Жестко связанные с корпусом 12 объекта тела (элементы конструкции) 8 при помощи механизмов 14 перемещения могут вводиться и выводиться в области (из областей) 5 и 6, посредством чего может регулироваться величина и направление равнодействующей сил F 15, приложенных к телам в областях 5. Тела 8 могут быть выполнены из любых материалов, располагаясь вместе с приводами перемещения, например, равномерно по поверхности тороидальной обмотки 11. 2 с. и 1 з.п.ф-лы, 5 ил.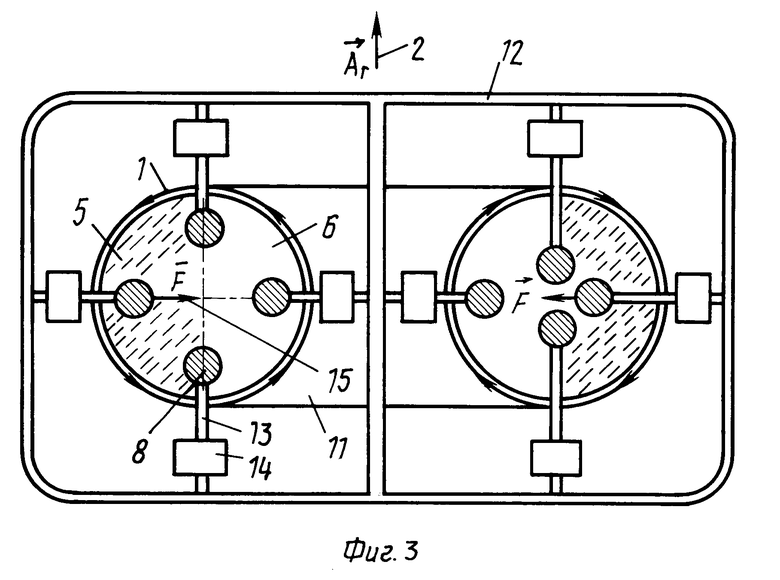
| Астронавтика и ракетодинамика /Экспресс-информация, М., 1981, N 39, с.22-23. |
