Изобретение относится к области машиностроения и может быть использовано в двигательных (тяговых) системах для перемещения объектов в пространстве и в устройствах преобразования механической энергии в другие виды энергии.
Известен способ генерирования механической энергии, включающий в себя создание в генераторе магнитного поля и перемещение в этом поле тел, механически вязанных с объектом-потребителем механической энергии. Устройство, реализующее данный способ, содержит источник магнитного поля, материальные тела, механически связанные с объектом-потребителем механической энергии, и средство для перемещения этих тел в магнитном поле генератора механической энергии (см. , например, [1]). Эти способ и устройство основаны на принципе электромагнитного ускорения внешней среды с дипольной микроструктурой без ее ионизации и может использоваться для генерирования механической энергии (например, для создания тяги) как на Земле, так и в космосе.
Недостатками способа и соответствующего устройства являются ограниченная область применения (требуется подходящая среда) и относительно высокие энергозатраты на генерирование необходимых возбуждающих электромагнитных полей.
Известен также способ генерирования механической энергии, используемой для перемещения объекта-потребителя механической энергии в пространстве, включающий создание в генераторе магнитного поля с векторным потенциалом A, ориентированным под углом 90 - 270o к космологическому векторному потенциалу Aг, и перемещение в этом поле тел, механически связанных с объектом-потребителем механической энергии, в области пониженных значений потенциала Aсум, равного сумме указанных векторных потенциалов.
Устройство для осуществления этого способа (генератора механической энергии) содержит источник магнитного поля, выполненный в виде тороидальной токовой обмотки, материальные тела, размещенные во внутренней полости обмотки, и средства для перемещения этих тел, выполненные в виде механизмов изменения положения тел относительно поверхности обмотки. Механизмы изменения положения тел могут быть выполнены в виде равномерно размещенных вдоль поверхности обмотки тяг, жестко связанных с корпусом объекта-потребителя механической энергии и снабженных приводами их выдвижения уборки вдоль радиальных направлений образующей окружности торовой поверхности обмотки (см. [2] ).
При этом реализуется несимметричное распределение вещества в окрестности области пространства, характеризуемой уменьшенным суммарным потенциалом Aсум, равным сумме векторного потенциала A магнитного поля устройства и космологического векторного потенциала Aг, что в соответствии с физическими теоретическими представлениями и подтверждающими их экспериментальными данными, изложенными, например, в тексте описания изобретения [2] и в работах [3 - 14] , приводит к возникновению силы, воздействующей на перемещаемые тела, механически связанные с объектом-потребителем механической энергии, и перемещающей за счет выработанной при этом процессе механической энергии объект в пространстве.
Недостатком этого способа является относительно малая величина силы, возникающей при его использовании и воздействующей на объект, а следовательно, и малая величина генерируемой механической энергии, а также значительные энергетические потери.
Устройство, реализующее способ, конструктивно достаточно сложно. Для отбора от него генерируемой механической энергии (для подключения к устройству иных потребителей и/или преобразователей механической энергии в другие виды энергии, например, в электрическую) необходимы сложные дополнительные устройства и системы их управления.
Наиболее близким по технической сущности и достигаемому результату к предлагаемому изобретению является способ генерирования механической энергии, включающий создание в генераторе магнитного поля с векторным потенциалом A, ориентированным под углом 90 - 270o к космологическому векторному потенциалу Aг, и вращение в этом поле материальных тел, механически связанных с потребителями механической энергии, в области пониженных значений потенциала Aсум, равного сумме указанных векторных потенциалов, при котором материальные тела предварительно раскручивают вокруг осей, перпендикулярных плоскостям, в которых расположены векторы векторного потенциала A магнитного поля генератора механической энергии и космологического векторного потенциала Aг, до достижения каждым из тел режима равенства нулю момента внешних сил относительно центра инерции тела, после чего предварительное раскручивающее воздействие снимают и к вращающимся материальным телам подключают потребителей механической энергии.
Устройство, обеспечивающее осуществление данного способа (генератор механической энергии), содержит источник магнитного поля, выполненный в виде цилиндрической осесимметричной магнитной системы, и размещенные во внутренней полости магнитной системы материальные тела, выполненные в виде установленных с возможностью вращения дисковых роторов, оси которых размещены параллельно оси симметрии магнитной системы, выведены за ее пределы, подсоединены к потребителям механической энергии и механически связаны с системами предварительной раскрутки роторов (см. [15] - прототип "Способа ...." и "Устройства ...").
Недостатком способа и устройства-прототипа [15] является относительно невысокая эффективность создания и использования силы, возникающей при взаимодействии масс материальных тел-роторов с полем суммарного векторного потенциала Aсум, равного сумме поля векторного потенциала A и поля космологического векторного потенциала Aг и как следствие пониженная величина генерируемой энергии.
Целью предлагаемого изобретения является устранение отмеченного недостатка, создание способа генерирования механической энергии, обеспечивающего достижение более высокого значения генерируемой энергии, чем в прототипе, и создание достаточно простого устройства-генератора механической энергии, обеспечивающего реализацию этого способа.
Эта цель достигается за счет того, что при генерации механической энергии путем создания в генераторе поля суммарного векторного потенциала Aсум, равного сумме основного поля векторного потенциала A тока и поля космологического векторного потенциала Aг, с пониженным по отношению к величине космологического векторного потенциала Aг значением суммарного векторного потенциала Aсум, путем ориентирования вектора основного поля векторного потенциала A тока под углом 90 - 270o к вектору космологического векторного потенциала Aг, размещения и перемещения материальных тел, механически связанных с потребителями механической энергии, в указанном поле суммарного векторного потенциала Aсум, при котором материальные тела подвергают раскручивающему воздействию вокруг осей, перпендикулярных плоскостям, в которых расположены векторы основного поля векторного потенциала A тока и поля космологического векторного потенциала Aг до достижения каждым из тел режима равенства нулю момента внешних сил относительно центра инерции тела, и последующего снятия указанного раскручивающего воздействия и подсоединения к вращающимся материальным телам потребителей механической энергии, создают связанные с материальными телами дополнительные поля векторного потенциала Aд тока, векторы Aд которого ориентируют по крайней мере частично под углом 90 - 270o к вектору космологического векторного потенциала Aг, и осуществляют перемещение указанных материальных тел путем их качения по замкнутой траектории, располагаемой по крайней мере частью своей длины в поле упомянутого суммарного векторного потенциала Aсум, равного сумме основного поля векторного потенциала A тока и поля космологического векторного потенциала Aг, в направлении, ориентированном по крайней мере на части траектории движения материальных тел под углом 0 -± 90o к направлению вектора космологического векторного потенциала Aг.
Отметим, что в настоящей заявке уточнена терминология, используемая при описании известных отличительных особенностей выбранного прототипа [15] и заявляемого технического решения, а именно вместо термина "векторный потенциал A магнитного поля" используется имеющий тот же физический смысл, но более общий и более физически правильный термин "векторный потенциал A тока" (см. [16, стр. 219]).
В соответствии с изобретением качение материальных тел осуществляют путем перемещения осей вращения этих тел по замкнутой траектории, эквидистантной траектории качения тел, с угловой скоростью ω, вектор которой ориентируют противоположно направлению вектора rot A, при этом вектор ωт угловой скорости вращения каждого материального тела вокруг своей оси ориентируют по направлению вектора rot A и противоположно направлению вектора rot Aд, где:
A - вектор основного поля векторного потенциала тока,
Aд - вектор связанного с каждым материальным телом дополнительного поля векторного потенциала тока.
При этом основное и/или дополнительное поля векторных потенциалов A, Aд тока создают либо путем использования источников полей векторного потенциала тока, выполненных из постоянных магнитов, либо путем пропускания электрического тока по токоведущим элементам генератора.
Для снижения потерь генерируемой энергии в области размещения и перемещения материальных тел снижают индукцию магнитного поля источника основного поля векторного потенциала A тока, например, либо путем концентрации и замыкания силовых линий магнитного поля источника основного поля векторного потенциала A тока вне области размещения и перемещения материальных тел, либо путем наложения в источнике основного поля векторного потенциала A тока друг на друга нескольких магнитных полей с различными направлениями векторов магнитной индукции, в частности, путем наложения в источнике основного поля векторного потенциала A тока друг на друга двух осесимметричных магнитных полей с противоположно направленными векторами магнитной индукции.
Для осуществления этих операций заявляемого "Способа ..." в устройстве-генераторе механической энергии, содержащем источник основного поля векторного потенциала A тока, выполненный в виде осесимметричной магнитной системы с внутренней полостью, и материальные тела, размещенные во внутренней полости магнитной системы и выполненные в виде установленных с возможностью вращения роторов, механически связанных с системами предварительной раскрутки роторов и с системами подсоединения роторов к потребителям механической энергии, эти материальные тела, размещенные во внутренней полости магнитной системы источника магнитного поля векторного потенциала A тока, снабжены закрепленными на них источниками дополнительных полей векторного потенциала Aд тока, введены в механическое зацепление с поверхностью внутренней полости магнитной системы источника основного поля векторного потенциала A тока и связаны с механизмом приведения роторов в движение качения роторов по поверхности внутренней полости указанной магнитной системы.
В соответствии с изобретением механизм приведения роторов в движение качения роторов по поверхности внутренней поверхности магнитной системы может быть выполнен в виде сепаратора с закрепленными в нем с возможностью вращения роторами, механически связанного с системой предварительной раскрутки сепаратора и с системой подсоединения сепаратора к потребителям механической энергии, а магнитная система генератора может быть выполнена в виде осесимметричного источника магнитного поля и магнитопровода, выполненного в виде установленных на полюсах источника магнитного поля полюсных наконечников, развитых в радиальном относительно оси источника магнитного поля направлении и связанных между собой на периферии.
При этом упомянутый источник магнитного поля может быть выполнен в виде постоянного кольцевого магнита с осевой намагниченностью, либо в виде набора стержневых постоянных магнитов с осевой намагниченностью, оси которых размещены на замкнутой цилиндрической поверхности, оси которых размещены на замкнутой цилиндрической поверхности и расположены параллельно оси магнитной системы источника основного поля векторного потенциала A тока, либо в виде одной соленоидальной токовой обмотки, или в виде двух коаксиально расположенных осесимметричных соленоидов.
В соответствии с изобретением магнитная система генератора может быть выполнена в виде тороидальной токовой обмотки, которая в свою очередь может быть выполнена в виде отдельных прямолинейных участков, сопряженных между собой криволинейными переходниками.
Элементы, связывающие между собой на периферии полюсные наконечники магнитной системы, могут быть выполнены в виде магнитопроводящих полых цилиндров, размещенных коаксиально с источником магнитного поля, либо в виде набора магнитопроводящих стержней, размещенных на периферии полюсных наконечников.
Всю массу или по крайней мере часть массы материальных тел-роторов устройства рекомендуется выполнять из вещества с плотностью не менее 8000 кг/м3, например из тантала.
В соответствии с изобретением источники дополнительных полей векторного потенциала Aд тока, могут быть выполнены в виде закрепленных на материальных телах цилиндрических постоянных магнитов с осевой намагниченностью, либо в виде закрепленных на материальных телах соленоидальных токовых обмоток.
При реализации "Способа ..." и выполнении устройства - генератора механической энергии указанным образом силы, возникающие вследствие создания неравномерного распределения и перемещения вещества в областях пространства, характеризуемых наличием поля суммарного векторного потенциала Aсум, равного сумме основного поля векторного потенциала A тока и поля космологического векторного потенциала Aг, с пониженным по отношению к величине космологического векторного потенциала Aг значением суммарного векторного потенциала Aсум, и полей с пониженным суммарным потенциалом, равным сумме векторных потенциалов Aд дополнительных полей векторного потенциала и тока и космологического векторного потенциала Aг, и воздействующие на материальные тела, размещенные по крайней мере частью своей массы в этой области и вращаемые вокруг осей, перпендикулярных плоскостям, в которых расположены векторы векторных потенциалов A и Aд генератора механической энергии и космологического векторного потенциала Aг, после достижения этими телами (за счет их предварительной раскрутки) режима свободного инерциального вращения (т.е. режима равенства нулю момента внешних сил относительно центра инерции тела), продолжают действовать на материальные тела, в результате чего генерируемая при этом механическая энергия может быть отведена к потребителям (например, к электрогенераторам или к вращающимся элементам транспортных средств), что оптимальным образом обеспечивается предложенной конструкцией устройства. При этом сводятся к минимуму энергетические потери, обусловленные эффектами, возникающими при вращении электропроводных тел в магнитном поле.
Изобретение соответствует критериям патентоспособности:
- критерию новизны, поскольку предложенное техническое решение неизвестно из современного уровня техники (отсутствуют сведения об аналогах, ставшие общедоступными до даты приоритета изобретения);
- критерию наличия изобретательского уровня, поскольку оно для специалиста явным образом не следует из уровня техники (основано на новых физических принципах и явлениях - см., например, [2 - 14]);
- критерию промышленной применимости, поскольку получено опытное экспериментальное подтверждение существования новых физических явлений, на которых базируется изобретение, и воздействия возникающих при этом сил на материальные тела (см., например, [9 - 14]).
Сущность изобретения поясняется чертежами, на которых
на фиг. 1 приведена принципиальная схема, поясняющая реализацию предлагаемого "Способа ..." при осуществлении движения качения материальных тел (роторов) по внутренней полости источника основного поля векторного потенциала A тока (осесимметричной магнитной системы) в направлении движения осей роторов по часовой стрелке;
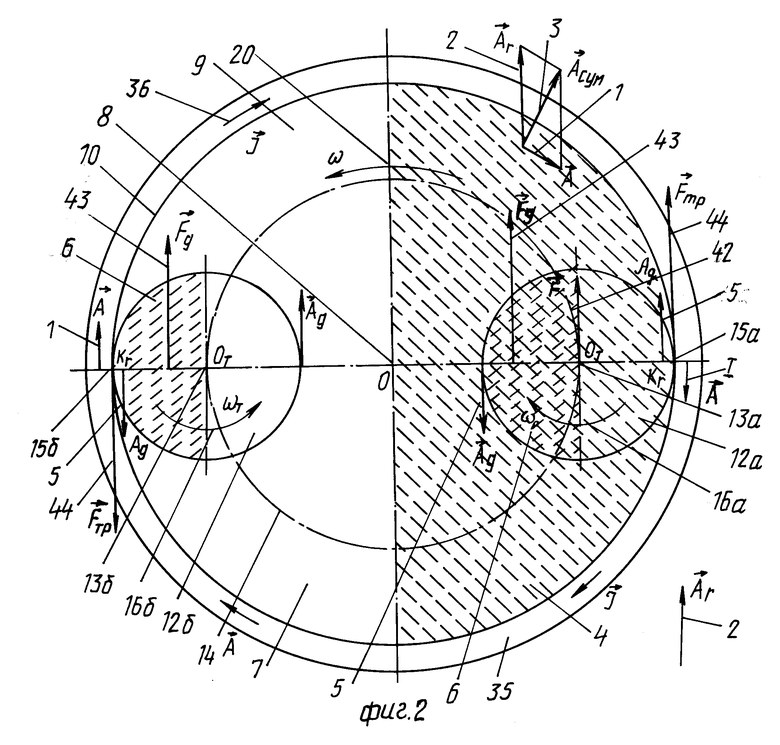
на фиг. 2 приведена принципиальная схема, поясняющая реализацию предлагаемого "Способа ..." при осуществлении движения качения материальных тел (роторов) по внутренней полости источника основного поля векторного потенциала A тока (осесимметричной магнитной системы) в направлении движения осей роторов против часовой стрелки;
(кроме того фиг. 1 и 2 иллюстрируют принцип осуществления конструкции устройства - генератора механической энергии, в котором источник магнитного поля выполнен в виде соленоидальной токовой обмотки в соответствии с п. 14 формулы изобретения);
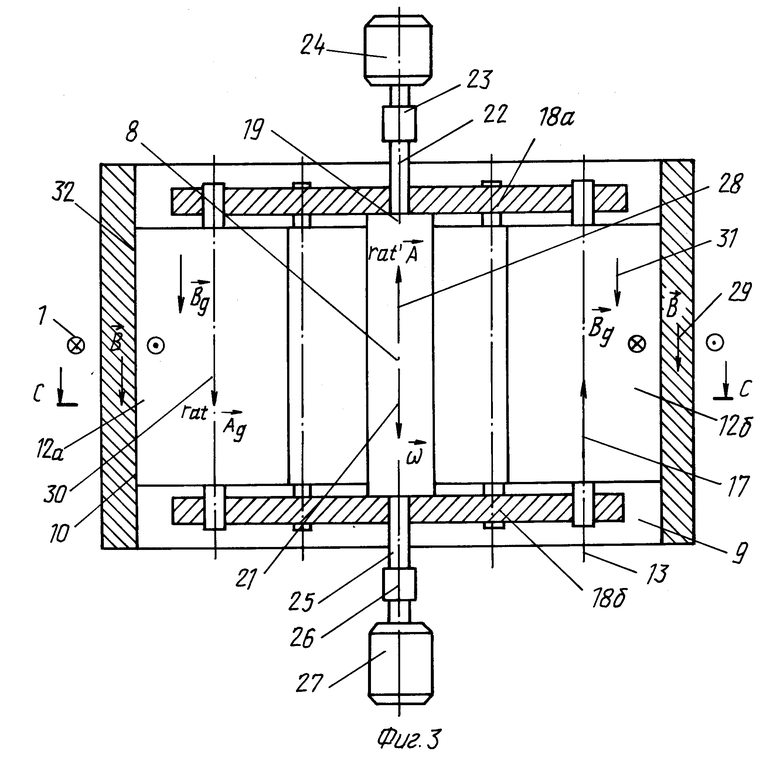
на фиг. 3 приведена принципиальная схема конструкции устройства - генератора механической энергии с источником основного поля векторного потенциала A тока, выполненным в виде осесимметричной магнитной системы с внутренней полостью, содержащего материальные тела, размещенные во внутренней полости магнитной системы (источник магнитного поля которой выполнен в виде постоянного кольцевого магнита с осевой намагниченностью) и выполненные в виде установленных с возможностью вращения роторов, механически связанных при помощи сепаратора с системами предварительной раскрутки роторов и с системами подсоединения роторов к потребителям механической энергии (в соответствии с пп. 9, 10, 12 формулы изобретения), с указанием направлений векторов индукции B основного и Bд дополнительных полей векторных потенциалов A и Aд тока, соответствующим направлению движения качения материальных тел (роторов) по часовой стрелке (как показано на фиг. 1), при этом источники дополнительных полей векторного потенциала Aд тока выполнены в виде закрепленных на материальных телах цилиндрических постоянных магнитов с осевой намагниченностью (в соответствии с п. 23 формулы изобретения);
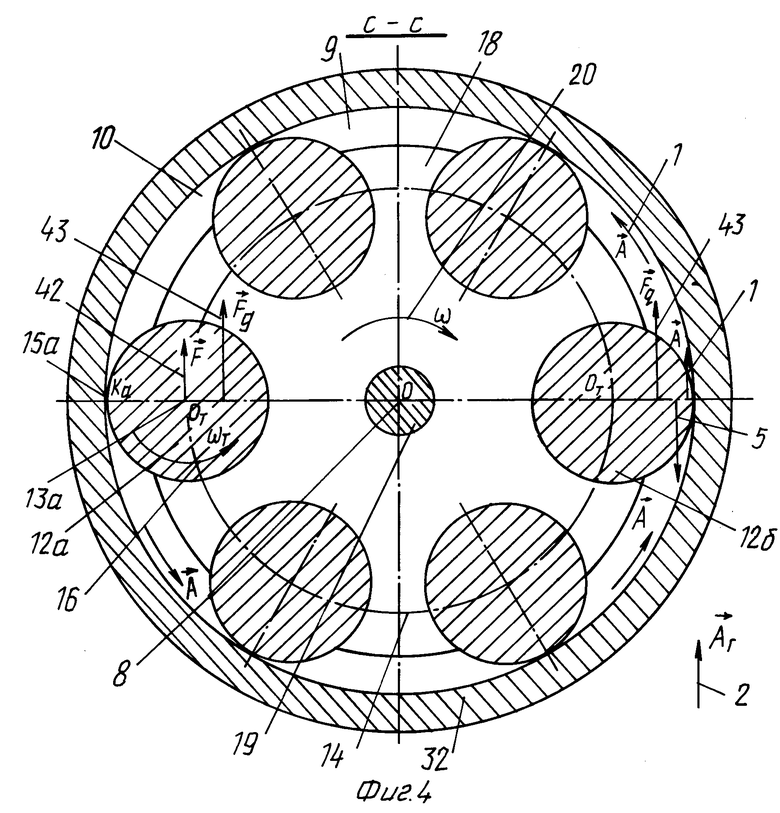
на фиг. 4 показан разрез C-C генератора на фиг. 3 с указанием взаимного расположения вектор-потенциала A основного поля генератора, вектор-потенциала Aд дополнительного поля, космологического векторного потенциала Aг и векторов сил (F, Fд), действующих на материальное тело (ротор-диск) и приводящих его в движение вращения и качения;
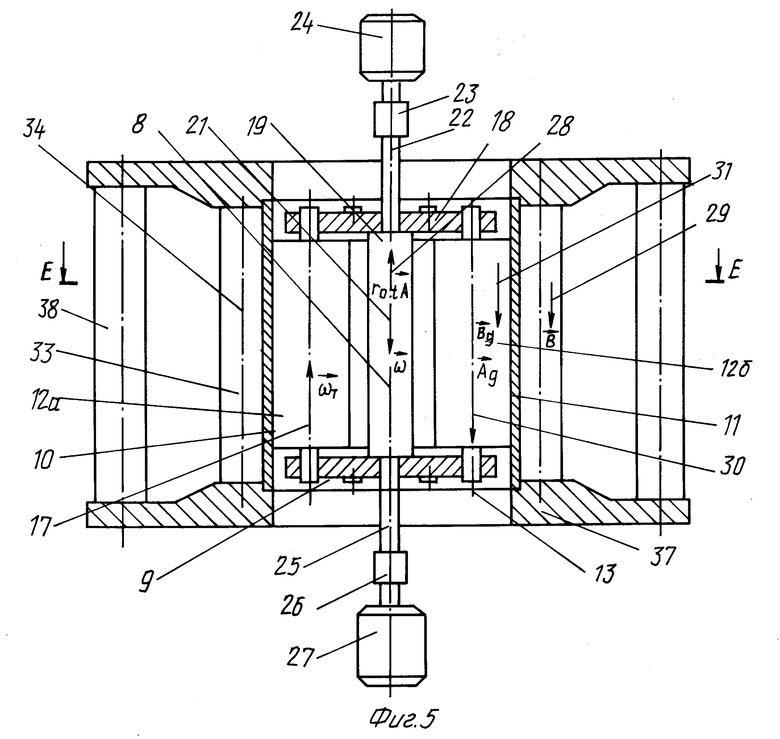
на фиг. 5 приведена принципиальная схема конструкции устройства - генератора механической энергии с магнитной системой, выполненной в виде осесимметричного источника магнитного поля и магнитопровода, выполненного в виде установленных на полюсах источника магнитного поля полюсных наконечников, развитых в радиальном относительно оси источника магнитного поля направления и связанных между собой на периферии (в соответствии с п. 11 формулы изобретения), при этом источник магнитного поля системы выполнен в виде набора стержневых постоянных магнитов с осевой намагниченностью, оси которых размещены на замкнутой цилиндрической поверхности и расположены параллельно оси магнитной системы источника основного поля векторного потенциала A тока (в соответствии с п.13 формулы изобретения), а элементы, связывающие между собой полюсные наконечники магнитной системы, выполнены в виде набора магнитопроводящих стержней, размещенных на периферии полюсных наконечников (в соответствии с п.19 формулы изобретения);
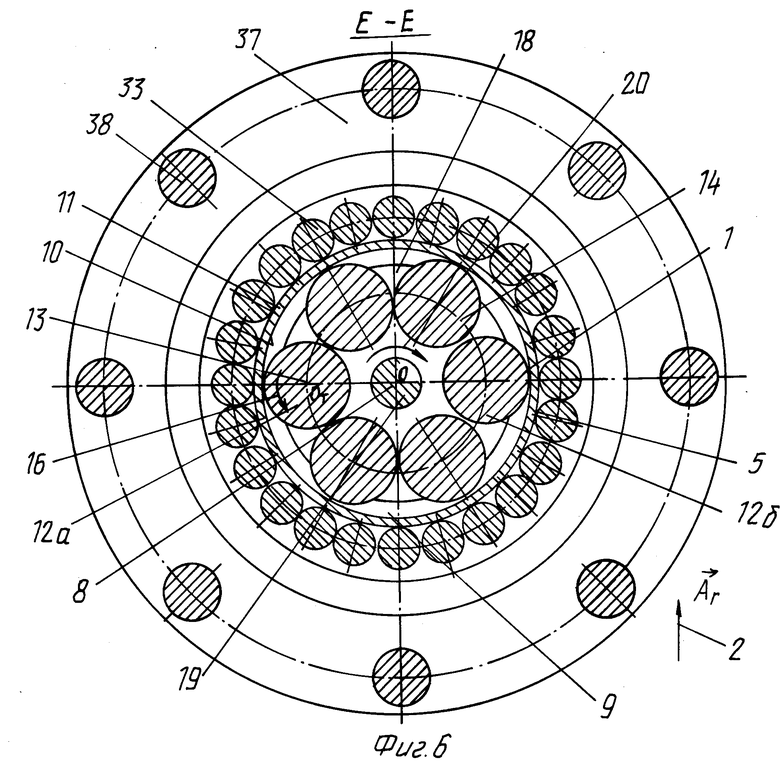
на фиг. 6 показан разрез E-E генератора на фиг.5 с указанием взаимного расположения вектор-потенциала A основного поля генератора, вектор-потенциала Aд дополнительного поля и космологического векторного потенциала Aг;
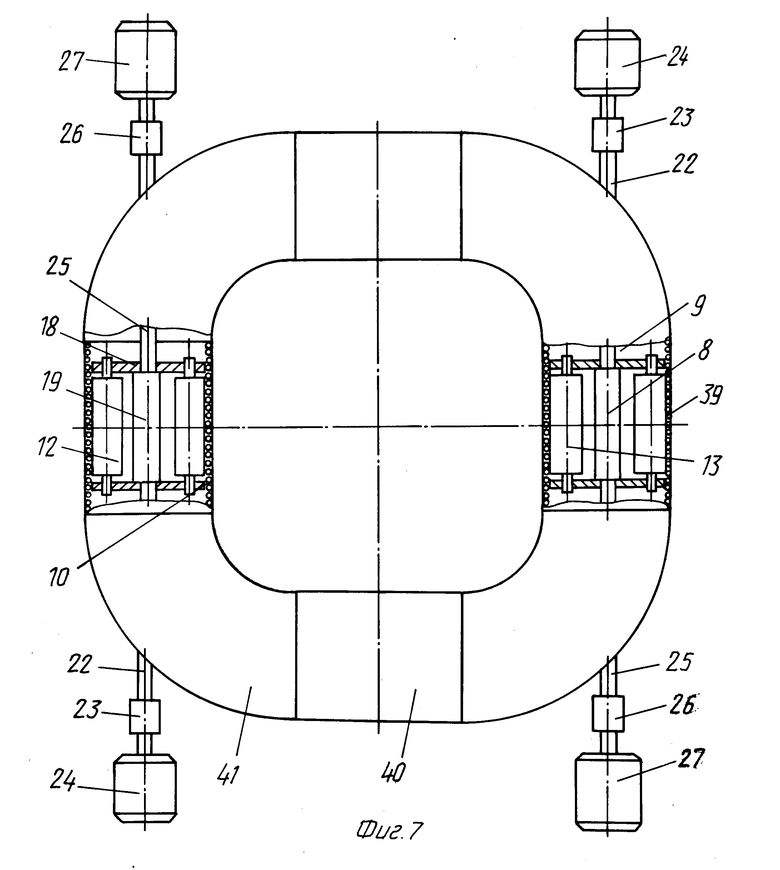
на фиг. 7 приведена принципиальная схема конструкции устройства - генератора механической энергии с магнитной системой, выполненной в виде тороидальной токовой обмотки, сформированной в виде отдельных прямолинейных участков, сопряженных между собой криволинейными переходниками (в соответствии с пп. 16, 17 формулы изобретения).
На чертежах обозначены:
поз. 1 - вектор-потенциал (A) основного поля векторного потенциала тока генератора механической энергии; (указан на фиг. 1, 2, 3, 4, 6);
поз.2 - космологический вектор-потенциал (Aг); (фиг.1, 2, 4, 6);
поз.3 - суммарный вектор-потенциал (Aсум), равный сумме векторного потенциала 1(A) основного поля векторного потенциала тока генератора и космологического векторного потенциала 2(Aг); (фиг.1, 2);
поз.4 - область пространства с пониженным суммарным потенциалом 3(Aсум), равным сумме векторного потенциала 1(A) основного поля векторного потенциала тока генератора и космологического векторного потенциала 2(Aг) (на фиг.1, 2 область 4 заштрихована штриховыми линиями под углом 135o к горизонтальной оси чертежа); (фиг.1, 2);
поз.5 - вектор-потенциал (Aд) дополнительных полей векторного потенциала тока; (фиг.1, 2, 4, 6);
поз. 6 - области пространства с пониженным суммарным потенциалом, равным сумме вектор-потенциалов 5(Aд) дополнительных полей векторного потенциала тока и космологического векторного потенциала 2(Aг); (на фиг.1, 2 области 6 заштрихованы штриховыми линиями под углом 45o к горизонтальной оси чертежа);
поз. 7 - область пространства с неизменным, постоянным суммарным потенциалом, равным космологическому векторному потенциалу 2(Aг); (фиг.1, 2);
поз. 8 - ось магнитной системы генератора механической энергии; (фиг. 1-7), (точка "О" на фиг.1, 2, 4, 6);
поз.9 - внутренняя полость магнитной системы генератора механической энергии; (фиг.1-7);
поз. 10 - внутренняя поверхность внутренней полости 9 магнитной системы генератора механической энергии; (фиг.1-7);
поз.11 - обойма магнитной системы; (фиг.5, 6);
поз.12 - материальные тела (роторы); (фиг.1-7);
поз. 13 - ось вращения материального тела (ротора) 12, ориентированная перпендикулярно плоскости расположения векторов векторного потенциала 1(A) магнитного поля генератора механической энергии и космологического векторного потенциала 2(Aг); (фиг.1-7), (точка "От" на фиг.1, 2, 4, 6);
поз. 14 - траектория перемещения осей 13 материальных тел (роторов) 12 при их качении по внутренней поверхности 10 внутренней полости 9 (или обоймы 11) магнитной системы; (фиг.1, 2, 4, 6);
поз. 15 - мгновенная ось вращения материального тела 12 при его качении по внутренней поверхности 10 внутренней полости 9 (или обоймы 11) магнитной системы; (точка "К" на фиг.1, 2, 4);
поз. 16 - направление вращения материального тела (ротора) 12 вокруг оси 13 с угловой скоростью ωт; (фиг.1, 2, 4, 6);
поз.17 - вектор ωт угловой скорости вращения материального тела (ротора) 12 вокруг оси 13 (соответствует направлению 16 вращения тела 12); (фиг.3, 5);
поз. 18 - сепаратор для установки вращаемых материальных тел (роторов) 12; (фиг.3-7);
поз.19 - вал сепаратора 18; (фиг.3-7);
поз. 20 - направление вращения сепаратора 18 вокруг оси 8 с угловой скоростью ω (направление качения материальных тел 12 по внутренней поверхности 10 внутренней полости 9 (или обоймы 11) магнитной системы); (фиг.1, 2, 4, 6);
поз. 21 - вектор ω угловой скорости вращения сепаратора 18 вокруг оси 8 (соответствует направлению 20 вращения сепаратора 18); (фиг.3, 5);
поз.22 - вал для механической связи материального тела (ротора) 12 с системой 24 предварительной раскрутки материальных тел (роторов) 12; (фиг.3, 5, 7);
поз. 23 - управляемая муфта системы 24 предварительной раскрутки материальных тел (роторов) 12; (фиг.3, 5, 7);
поз. 24 - система предварительной раскрутки материальных тел (роторов) 12; (фиг.3, 5, 7);
поз.25 - вал для механической связи материального тела (ротора) 12 с потребителем 27 механической энергии; (фиг.3, 5, 7);
поз. 26 - управляемая муфта потребителя 27 генерируемой механической энергии; (фиг.3, 5, 7);
поз.27 - потребитель генерируемой механической энергии; (фиг.3, 5, 7);
поз. 28 - вектор (rot A) основного поля векторного потенциала 1(A) тока; (фиг.3, 5);
поз. 29 - вектор (B) магнитной индукции основного поля векторного потенциала 1(A) тока; (фиг.3, 5);
поз. 30 - вектор (rot Aд) дополнительного поля векторного потенциала тока, создаваемого закрепленными на материальных телах 12 цилиндрическими постоянными магнитами (или соленоидальными токовыми обмотками) с осевой намагниченностью; (фиг.3, 5);
поз. 31 - вектор (Bд) магнитной индукции дополнительного поля векторного потенциала Aд тока, совпадающий по направлению с вектором 30 (rot Aд); (фиг. 3, 5);
поз. 32 - постоянный кольцевой магнит с осевой намагниченностью; (фиг.3, 4);
поз.33 - стержневой постоянный магнит с осевой намагниченностью; (фиг.5, 6);
поз.34 - ось стержневого постоянного магнита 33; (фиг.5);
поз.35 - соленоидальная токовая обмотка; (фиг.1, 2);
поз. 36 - электрический ток (I), пропускаемый по соленоидальной токовой обмотке 35; (фиг.1, 2);
поз. 37 - полюсные наконечники магнитной системы генератора механической энергии; (фиг.5, 6);
поз. 38 - магнитопроводящий стержень для связи полюсных наконечников 37; (фиг.5, 6);
поз.39 - тороидальная токовая обмотка; (фиг.7);
поз.40 - прямолинейный участок тороидальной токовой обмотки; (фиг.7);
поз.41 - криволинейный переходник тороидальной токовой обмотки; (фиг.7);
поз. 42 - вектор суммарной механической силы (F), действующей на материальное тело (ротор) 12 (или на его часть) вследствие расположения тела 12 (или его части) в области 4 пространства с пониженным суммарным потенциалом 3(Aсум), равным сумме векторного потенциала 1(A) основного поля векторного потенциала тока генератора и космологического векторного потенциала 2(Aг); (фиг.1, 2, 4);
поз. 43 - вектор суммарной механической силы (Fд), действующей на материальное тело (ротор) 12 (или на его часть) вследствие расположения тела 12 (или его части) в области 6 пространства с пониженным суммарным потенциалом, равным сумме вектор-потенциалов 5(Aд) дополнительных полей векторного потенциала тока и космологического векторного потенциала 2(Aг); (фиг.1, 2, 4);
поз. 44 - вектор силы (Fтр) трения, действующей на материальное тело (ротор) 12 в точке 15 ("К" контакта ротора 12 с внутренней поверхностью 10 внутренней полости 9 магнитной системы генератора механической энергии; (фиг.1, 2);
В соответствии с чертежом генератор механической энергии содержит источник основного поля векторного потенциала 1(A) тока, выполненный в виде симметричной относительно оси 8 магнитной системы с внутренней полостью 9, имеющей внутреннюю поверхность 10, и материальные тела 12, размещенные во внутренней полости 9 магнитной системы и выполненные в виде установленных с возможностью вращения роторов, размещенных в сепараторах 18, соединенных между собой валом 19, которые механически связаны валом 22 через управляемую муфту 23 с системами 24 предварительной раскрутки материальных тел (роторов) 12, а через вал 25 и управляемую муфту 26 с потребителем 27 генерируемой механической энергии (например, с электрогенератором).
В качестве материала, из которого изготовлены материальные тела (роторы) 12 (или, по крайней мере, материала части их массы), использованы вещества с достаточно высокой плотностью - не менее 8000 кг/м3, т.е. выбранные, например, из ряда: латунь, медь, молибден, свинец, тантал, вольфрам и т.п. (см. , например, [17]).
Материальные тела (роторы) 12, генераторы, размещенные во внутренней полости 9 магнитной системы источника основного поля векторного потенциала 1(A) тока, снабжены закрепленными на них источниками дополнительных полей векторного потенциала 3(Aд) тока - постоянными цилиндрическими магнитами с осевой намагниченностью (их векторы 30 (rot Aд) и 31 (Bд - магнитной индукции) параллельны осям 13 материальных тел (роторов) 12) или закрепленными на материальных телах (роторов) 12 соленоидальными токовыми обмотками, введены в механическое зацепление (фрикционное или зубчатое) с внутренней поверхностью 10 внутренней полости 9 магнитной системы источника основного поля векторного потенциала 1(A) тока и связаны с механизмом приведения материальных тел (роторов) 12 в движение качения роторов 12 по внутренней поверхности 10 внутренней полости 9 указанной магнитной системы; этот механизм включает в себя систему 24 предварительной раскрутки роторов 12, управляемую муфту 23, вал 22, сепаратор 18 и его вал 19.
Источник магнитного поля основного поля векторного потенциала 1(A) тока (создающий поле, векторы 28 (rot A) и 29(B) которого направлены параллельно оси 8 магнитной системы - оси вращения сепаратора 18 - и осям 13 вращения материальных тел 12), может быть выполнен либо в виде постоянного кольцевого магнита 32 с осевой намагниченностью (фиг.3, 4), либо в виде набора стержневых постоянных магнитов 24 с осевой намагниченностью, оси 25 которых размещены на замкнутой цилиндрической поверхности и расположены параллельно оси 8 магнитной системы источника основного поля векторного потенциала 19A) тока (фиг. 5, 6), либо в виде соленоидальной токовой обмотки 35, по которой пропускают электрический ток 36 (I) (фиг.1, 2).
Источник основного магнитного поля 29 (B) может быть снабжен магнитопроводом, выполненным в виде установленных на полюсах источника (поз.32, 33, 35) магнитного поля 29 (B) полюсных наконечников 37, развитых в радиальном относительно оси 8 источника магнитного поля направлении и связанных между собой на периферии при помощи магнитопроводящих полых цилиндров, размещенных коаксиально с источником магнитного поля или (как показано на фиг.5, 6) при помощи набора магнитопроводящих стержней 38, размещенных на периферии полюсных наконечников 37.
Магнитная система генератора может быть выполнена также в виде тороидальной токовой обмотки 39, которая в свою очередь может быть выполнена в виде отдельных прямолинейных участков 40, сопряженных между собой криволинейными переходниками 41.
В соответствии с предлагаемым "Способом..." генерирование механической энергии осуществляется следующим образом:
Путем пропускания электрического тока 36(I) по соленоидальной токовой обмотке 35 (фиг.1, 2) или по тороидальной токовой обмотке 39(40, 41) (фиг.7) (либо путем использования постоянных магнитов: кольцевого магнита 32 (фиг.3, 4) или набора стержневых магнитов 33 (фиг.5, 6)) во внутренней полости 9 магнитной системы генератора механической энергии, в области 4 пространства создают за счет ориентирования вектора основного поля векторного потенциала 1(A) тока под углом 90 - 270o к вектору космологического векторного потенциала 2(Aг) (имеющему постоянное направление в окрестности Солнца и ближайших к Земле звезд) поле суммарного векторного потенциала 3(Aсум), равного сумме основного поля векторного потенциала 1(A) тока и поля космологического векторного потенциала 2(Aг), с пониженным по отношению к величине космологического векторного потенциала 2(Aг) значением суммарного векторного потенциала 3(Aсум). (Область 4 на фиг.1, 2 заштрихована штриховыми линиями под углом 135o к горизонтальной оси чертежа).
Заметим при этом, что графически иллюстрируемое на фиг.1, 2 сложение векторов 1(A) и 2(Aг) служит только для наглядности; аналитически их сумма выражается сложным математическим рядом, см., например, [12].
Поскольку в соответствии с теорией и экспериментами [3-14] величина космологического векторного потенциала Aг при его взаимодействии с любым другим векторным потенциалом тока может быть только уменьшена до некоторого суммарного векторного потенциала и не может быть увеличена, например, при совпадении направлений космологического вектор-потенциала Aг и другого вектор-потенциала, взаимодействующего с Aг, и так как направление вектор-потенциала 1(A) основного поля векторного потенциала тока в соленоидальной токовой обмотке 35 совпадает с направлением пропускаемого по этой обмотке тока 36(I), то в зависимости от конкретного направления тока 36(I) (против - фиг. 1, и по - фиг.2 часовой стрелке) область 4 пространства с пониженным суммарным потенциалом 3 (Aсум), равным сумме векторного потенциала 1(A) основного поля векторного потенциала тока генератора и космологического векторного потенциала 2(Aг), будет создана либо в левой (относительно вертикальной оси чертежа) (фиг.1), либо в правой (фиг.2) половине внутренней полости 9 магнитной системы.
Во второй половине внутренней полости 9 магнитной системы генератора образуется область 7 пространства с неизменным, постоянным суммарным потенциалом, равным космологическому векторному потенциалу 2(Aг).
Во внутренней полости 9 магнитной системы размещают материальные тела (роторы) 12 и за счет установки и закрепления на этих материальных телах (роторах) 12 источников полей векторного потенциала тока (выполненных, например, из постоянных магнитов с осевой намагниченностью или в виде соленоидальных токовых обмоток) создают связанные с материальными телами (роторами) 12 дополнительные поля векторного потенциала 5(Aд) тока, векторы 5(Aд которого ориентируют по крайней мере частично под углом 90 - 270o к вектору космологического векторного потенциала 2(Aг).
Таким образом создают дополнительно к области 4 еще и области 6 пространства с пониженным суммарным потенциалом, равным сумме вектор-потенциалов 5(Aд) дополнительных полей векторного потенциала тока и космологического векторного потенциала 2(Aг); (на фиг.1, 2 области 6 заштрихованы штриховыми линиями под углом 45o к горизонтальной оси чертежа).
Согласно данным [3-14] в результате этого, в областях 4 и 6 пространства возникают механические силы, действующие на соответствующие части массы материальных тел (роторов) 12, расположенные в областях 4 и 6.
Каждая из этих сил складывается из большего количества сил, распределенных по элементам тела (ротора) 12 и имеющих различную величину в зависимости от конкретного места расположения того или иного элемента тела 12 в областях пространства 4 и 6 и от величины и направления вектора скорости движения этого элемента материального тела (ротора) 12.
Результирующие всех сил, воздействующих на материальное тело (ротор) 12, показаны на чертеже (см. фиг.1, 2, 4) в виде:
- вектора 42 суммарной механической силы (F), действующей на материально тела (ротор) 12 (или на его часть) вследствие расположения тела 12 (или его части) в области 4 пространства с пониженным суммарным потенциалом 3(Aсум), равным сумме векторного потенциала 1(A) основного поля векторного потенциала тока генератора и космологического векторного потенциала 2(Aг), и приложенной к оси 13 (точка "Ог" фиг.1, 2, т.е. к линии, проходящей через центр тяжести всего тела);
- вектора 43 суммарной механической силы (Fд), действующей на материальное тело (ротор) 12 (или на его часть) вследствие расположения тела 12 (или его части) в области 6 пространства с пониженным суммарным потенциалом, равным сумме вектор-потенциалов 5 (Aд) дополнительных полей векторного потенциала тока и космологического векторного потенциала 2(Aг), и приложенной к сегменту материального тела (ротора) 12, соответствующему области 6 пространства.
Во всей остальной области пространстве (отмеченной на фиг.1, 2 позицией 7) изменения суммарного потенциала не происходит, и упомянутые виды сил на тела (или на части тел) 12, размещенные в области 7 пространства, не действуют.
Как видно из чертежа (фиг.1,2) на материальное тело (ротор) 12a, расположенное в области 4 пространства, действуют обе вышеуказанные силы: и 32(F) и 43(Fд), а на материальное тело (ротор) 12, находящееся в области 7, только сила 43(Fд).
При наличии зацепления материальных тел (роторов) 12 с внутренней поверхностью 10 внутренней полости 9 магнитной системы возникает сила 44(Fтр) трения, действующая на материальное тело (ротор) 12 в точке 15("K") контакта ротора 12 с внутренней поверхностью 10 внутренней полости 9 магнитной системы генератора механической энергии.
В результате действия сил 42(F), 43(F) и 44(Fтр)материальное тело (ротор) 12 приходит в движение качения по внутренней поверхности 10 внутренней полости 9 магнитной системы, при котором оси 13 (точки "От") тел 12 перемещаются в направлении 20 с угловой скоростью 21 (ω) по траектории 14, располагаемой частью своей длины в поле суммарного векторного потенциала 3(Aсум), равного сумме основного поля векторного потенциала 1(A) тока и поля космологического векторного потенциала 2(Aг). При этом возникает вращение материальных тел (роторов) 12 относительно собственных осей 13 в направлении 16 с угловой скоростью 17 (ωт)
Величины сил 42(F) и 43(Fд), действующих на материальные тела 12, зависят от величин векторного потенциала 1(A) тока, создаваемого источником 35(32, 33) поля векторного потенциала тока, векторного потенциала 5(Aд) дополнительных полей векторного потенциала тока (от степени обусловленных ими изменений суммарного векторного потенциала и его градиента) и от угловой скорости вращения материального тела (ротора) 12 (от скорости перемещения массы тела в областях пространства с пониженным суммарным потенциалом в направлении, ориентированном по крайней мере на части траектории движения материальных тел под углом 0 - ± 90o к направлению вектора космологического векторного потенциала 2(Aг).
Влияние на величины сил 42(F) и 43(Fд) скорости движения материального тела (ротора) 12 показано, например, в работе [12], из результатов которой следует пропорциональность силы F, возникающей при воздействии сильноточных систем с векторным потенциалом 1(A) на космический вакуум, сложному ряду λ(ΔA), что может быть записано в виде
F ~ λ(ΔA) = (1-V2/C2)1/2,
где ΔA - нелокальный параметр, равный
а) при расчете силы 42(F): разности величин суммарного потенциала 3(Aсум), равного сумме векторного потенциала 1(A) основного поля векторного потенциала тока генератора и космологического векторного потенциала 2(Aг), в точке расположения мгновенной оси вращения материального тела (ротора) 12 при его качении по внутренней поверхности 10 внутренней полости 9 (или обоймы 11) магнитной системы (т.е. в точке, соответствующей точке 15("K") чертежа), и в любых других конкретных точках расположения элементарных масс, входящих в состав материального тела (ротора) 12;
б) при расчете силы 43(Fд): разности величин суммарного потенциала, равного сумме векторного потенциала 5(Aд) дополнительных полей векторного потенциала тока и космологического векторного потенциала 2(Aг), в точке расположения оси вращения материального тела (ротора) 12 (т.е. в точке, соответствующей точке 13("От") чертежа), и в любых других конкретных точках расположения элементарных масс, входящих в состав материального тела (ротора) 12.
Т. е. в определении нелокального параметра ΔA фигурируют все точки материального тела 12, и для каждой i-й точки (для каждой элементарной массы, соответствующей этой точке) величина ΔAi будут иметь свое определенное значение, отличающееся от величины ΔAi в других точках тела 12.
Это для некоторой i-й элементарной массы материального тела 12 может быть записано в виде:
ΔAi= Aco-Aci,
где ΔAi - нелокальный параметр, соответствующий i-й точке (i -й элементарной массе) тела 12;
Aco - величина проекции вектора Aсум на направление вектора Aг в точке, относительно которой вращается масса материального тела 12 [т.е.а) для силы 42(F) - в точке 15("К") и б) для силы 43(Fд) - в точке 13("От")];
Aci - величина проекции вектора Aсум на направление вектора Aг в i-й точке материального тела 12.
Полная величина параметра ΔA получается при суммировании ΔAi по всем точкам (элементарным массам) i материального тела 7.
C - скорость света;
V - компонента скорости пары нейтрино-антинейтрино, образующей внутреннее пространство элементарных частиц, из которых образуется материальный объект, совпадающая по направлению с направлением космологического векторного потенциала 2(Aг).
Если материальную массу 12 в области с пониженным по отношению к величине космологического векторного потенциала 2(Aг) значением суммарного векторного потенциала 3(Aсум) (т.е. в областях 4 и 6 существования сил 42(F) и/или 43(Fд)) перемещать с некоторой скоростью Vo в направлении, совпадающем с направлением космологического векторного потенциала 2(Aг), то ряд λ(ΔA) примет вид
λ(ΔA) = (1-V
где
V1 - компонента скорости движения пары нейтрино-антинейтрино, аналогичная V, но в системе координат, движущейся со скоростью V0 в направлении вектора 2(Aг). Величина V1 < V. (Численные значения величин V и V1 находятся на уровне 108 м/с. Достигнутые значения V0, как правило, составляют 102 - 103 м/с).
Отсюда следует, что величина силы F (сил 42(F), 43(Fд)) возрастает с увеличением скорости движения массы 12 (скорости движения совокупности ее элементарных частиц) в направлении, совпадающем с направлением вектора 2(Aг), или более общей формулировке, в направлении, ориентированном под углом от 0 до ± 90o к направлению вектора космологического векторного потенциала 2(Aг).
Этот физический процесс приобретения материальной массой 12 механической энергии может быть для аналогии в какой-то степени уподоблен процессу отбора энергии электронами от распространяющейся электромагнитной волны при наличии разности скоростей движения электрона и фазовой скорости волны (так называемое "затухание Ландау", при котором максимальная эффективность взаимодействия частицы с электромагнитной волной достигается в режиме фазового резонанса, т. е. когда скорость частицы равна фазовой скорости волны) (см., например, [18]), хотя физическая сущность описываемого процесса и затухания Ландау, естественно, совершенно различны.
Другой механической наглядной аналогией описываемого процесса отбора материальным телом энергии от физического вакуума может служить процесс, происходящий при серфинге (передвижении на доске по большим прибойным волнам [19), когда максимальная эффективность передачи энергии от морской волны к доске имеет место при равенстве скоростей волны и доски.
Эффект взаимосвязи силы, аналогичной 43(Fд), со скоростью движения материального тела (магнитного диска) подтвержден в экспериментах [14].
Воздействие сил 42(F) и 43(Fд) на материальные тела роторы) 12 приводит к осуществлению движения качения этих тел по внутренней поверхности 10 внутренней полости 9 магнитной системы, в результате чего генерируется механическая энергия.
Чтобы эту механическую энергию можно было полезно использовать, материальные тела (роторы) 12 сначала путем их принудительного качения (обеспечиваемого механической системой поз.22, 23, 24) по замкнутой траектории, располагаемой по крайней мере частью своей длины в поле суммарного векторного потенциала 3(Aсум), равного сумме основного поля векторного потенциала 1(A) тока и поля космологического векторного потенциала 2(Aг) (по траектории, совпадающей с поперечным сечением поверхности 10), в направлении 16, ориентированном по крайней мере на части траектории движения материальных тел под углом от 0 до ± 90o к направлению вектора космологического векторного потенциала 2(Aг), предварительно раскручивают вокруг осей 13, перпендикулярных плоскостям, в которых расположены векторы основного поля векторного потенциала 1(A) тока и поля космологического векторного потенциала 2(Aг), до достижения каждым из тел (роторов) 12 режима свободного инерциального вращения, т. е. режима равенства нулю момента внешних сил относительно центра инерции тела 12.
Экспериментально установлено (см., например, [9, 10, 12]), что величина силы 41(F), воздействующей на материальные тела (роторы) 12 в области 4 пространства, зависит не только от величины абсолютного значения суммарного вектор-потенциала 3(Aсум), от его градиента в зоне расположения материального тела 12 и от скорости движения элементов материального тела 12 в этой зоне, но при вращении тела также зависит и от местонахождения точки, относительно которой осуществляется абсолютное вращение тела 12, приближаясь к максимуму при вращении материального тела относительно мгновенной оси 15 (точка "К", см. фиг.1, 2, 4), находящейся в каждый момент времени на внутренней поверхности 10 внутренней полости 9 магнитной системы.
Реализуемое по предлагаемому "Способу..." движение качения (при котором точка 15("К") для материальных тел (роторов) 12 как раз и является мгновенной осью вращения) позволяет обеспечить наибольшее воздействие силы 42(А) на тела 12.
Поскольку (как показано выше) силы 42(F) и 43(Fд) увеличиваются с увеличением линейной скорости движения, а следовательно, соответственно с увеличением угловой скорости 17(ωт) вращения и угловой скорости 21(ω) перемещения тела (ротора) 12 при его качении, то после обеспечения предварительной раскруткой равенства нулю момента всех внешних сил относительно центра инерции тела 12 (т.е. когда раскручивающий момент равен моменту сил трения и других сил) имеет дальнейший рост угловой скорости материального тела (ротора) 12. В этом режиме предварительное раскручивающее воздействие от системы 24 снимают (отключают управляемую муфту 23), а к вращающемуся и катящемуся по поверхности 10 материальному телу (ротору) 12 при помощи сепараторов 18, связанных валом 27 выработанной механической энергии (например, электрогенератор), вал которого приходит во вращение в направлении 20 вращения сепаратора 18 (по часовой стрелке при взаимном расположении полей, показанном на фиг. 1, и против часовой стрелки при взаимном расположении полей, показанном на фиг.2 чертежа).
Для максимальной реализации положительного эффекта должны быть осуществлены вполне определенные взаимосвязи между направлениями в пространстве вектора 17(ωт) угловой скорости вращения материального тела (ротора) 12, вектора 21(ω) угловой скорости вращения сепаратора 18, вектора 28(rot A) основного поля векторного потенциала 1(A) тока и вектора 30(rot Aд) дополнительного поля векторного потенциала тока, а именно вектор 21(ω) угловой скорости вращения сепаратора 18 (угловой скорости перемещения по замкнутой траектории, эквидистантной траектории качения тел 12, осей 13 вращения этих тел) ориентируют противоположно направлению вектора 28(rot A), а вектор 17(ωт) угловой скорости вращения каждого материального тела (ротора) 12 вокруг своей оси 13 ориентируют по направлению вектора 28(rot A) и противоположно направлению вектора 30(rot Aд) (см. фиг.3,5).
(Направления указанных векторов в пространстве определяются в соответствии с известными, общепринятыми правилами, см., например, [20, стр.24, 502]).
При движении (вращении) материальных тел (роторов) 12 в осесимметричных магнитных полях, создаваемых источниками 32, 33, 35, 39 (с магнитной индукцией 29(B)) и источниками дополнительных полей векторного потенциала 5(Aд) тока, (выполненными, например, в виде закрепленных на материальных телах цилиндрических постоянных магнитов с осевой намагниченностью и создающих поля с магнитной индукцией 31(Bд), возникают дополнительные силы, тормозящие роторы 12. Эти силы обусловлены затратами энергии на сопровождающее описываемый процесс генерирования механической энергии униполярное генерирование электрической энергии, эффективность которого, как известно (см., например, [16, стр.549-553]), зависит от величины магнитной индукции (B, Bд) в зоне расположения вращающихся тел 12 и от скорости их вращения.
Любые изменения скорости вращения материальных тел (роторов) 12, вызванные, например, изменением нагрузки на потребителе 27, приводят к дополнительным ("униполярным") потерям энергии.
Особенно неблагоприятные условия при этом создаются в случае наличия во внутренней полости 9 источников 32, 33, 35 неоднородных (градиентных) магнитных полей 29(B), 31(Bд) (что имеет место, например, при малом отношении высоты источников 32, 33, 35 к их диаметру), поскольку в этом режиме (даже при постоянных скоростях вращения роторов 12) по массе материальных тел (роторов) 12 происходит непрерывное перетекание электрических токов с соответствующими потерями.
Для снижения величины этих энергетических потерь необходимо в области 9 размещения и перемещения материальных тел (роторов) 12 снижать индукцию 29(B) магнитного поля источника основного поля векторного потенциала 1(A) тока.
По предложенному "Способу. . . " это осуществлено путем концентрации и замыкания силовых линий магнитного поля источника основного поля векторного потенциала 1(A) тока, например, в магнитопроводе, включающем в себя полюсные наконечники 37 и связывающие их на периферии магнитопроводящие элементы (стержни 38 - фиг.5, 6), т.е. путем концентрации и замыкания силовых линий этого магнитного поля вне области размещения и перемещения материальных тел (роторов) 12.
Такой же результат уменьшения индукции 29(B) магнитного поля источника основного поля векторного потенциала 1(A) тока достигается и при наложении в источнике основного поля векторного потенциала 1(A) тока друг на друга нескольких магнитных полей с различными направлениями векторов магнитной индукции, например, путем наложения в источнике основного поля векторного потенциала 1(A) тока друг на друга двух осесимметричных магнитных полей с противоположно направленными векторами магнитной индукции (что практически наиболее просто выполнимо в источнике 35 - фиг.1,2).
Вследствие того, что в областях 4 и 7, где размещают и осуществляют вращение (качение) материальных тел (роторов) 12, снижена индукция 29(B) магнитного поля, то сводится к минимуму энергетические потери, обусловленные эффектами, возникающими при вращении электропроводных тел в этом магнитном поле, т. е. вышеуказанные потери, связанные с генерированием разности потенциалов, с образованием и перетеканием по материальному телу 12 электрических токов (потери, связанные с явлением униполярной индукции [16, стр. 549-553] и с токами Фуко).
Следует отметить, что возникновение вращающей материальные тела (роторы) 12 силы 42(F) обусловлено наличием в области 4 не индукции 29(B) магнитного поля, а наличием векторного потенциала 1(A), который, как установлено, например, в [21] , имеет место даже при отсутствии в этой области пространства индукции (B) магнитного поля, что обеспечивает получение положительного эффекта (генерирование механической энергии) при минимуме потерь.
Снижение величины индукции 29(B) во внутренней полости 9 магнитной системы (т.е. областях 4 и 7) позволяет не только повысить энергетические характеристики процесса генерирования механической энергии, но и устранить опасность самопроизвольного процесса в режим торможения материальных тел (роторов) 12, т.е. в режим самоотключения генератора.
Устройство для реализации "Способа..." ("Генератор механической энергии") работает следующим образом.
За счет пропускания электрического тока 36(I) по соленоидальной токовой обмотке 35 (фиг. 1,2) или по тороидальной токовой обмотке 39 (фиг. 7) (либо за счет использования постоянных магнитов: кольцевого 32 (фиг. 3, 4) или набора стержневых 33 (фиг. 5, 6),) во внутренней полости 9 магнитной системы генератора механической энергии создают основное магнитное поле, вектор-потенциал 1(А) которого располагается в плоскостях, перпендикулярных оси 8 магнитной системы (источника 32, 33, 35, 39) магнитного поля.
В случае концентрации и замыкания силовых линий магнитного поля источника 33 основного поля векторного потенциала 1(А) тока вне области 9 размещения и перемещения материальных тел (роторов) 12 ( в соответствии с п. 6 формулы изобретения и с фиг. 5, 6 чертежа) основная часть индукции 29(B) этого магнитного поля сконцентрирована в самих магнитах 33, в полюсных наконечниках 37 и в периферийных элементах магнитопровода: в магнитопроводящем полом цилиндре (на чертеже не показан) или в магнитопроводящих стержнях 38, так что во внутренней полости 9 магнитной системы создано пространство с пониженным значением индукции 29(B) магнитного поля генератора.
Затем устройство располагают в пространстве таким образом, чтобы обеспечить создания во внутренней полости 9 магнитной системы области 4 с пониженным по отношению к величине космологического векторного потенциала 2(Aг) значением суммарного векторного потенциала 3(Aсум).
Практически это осуществляется путем ориентирования оси 8 магнитной системы генератора перпендикулярно направлению космологического вектор-потенциала 2(Aг), который согласно, например, экспериментальным результатам [9, 10, 12] имеет на Земле координату прямого восхождения 270± 7o.
Включив муфты 23, системами 24 через валы 22 и 19, вращая сепараторы 18 в направлении 20, осуществляют предварительную раскрутку установленных в сепараторе 18 с возможностью вращения материальных тел (роторов) 12 вокруг их осей 13 в направлении 16; при этом материальные тела (роторы) 12 совершают движение качения по внутренней поверхности 10 внутренней полости 9 магнитной системы.
Поскольку воздействующие на материальные тела (роторы) 12 силы 42(F) и 43(Fд) увеличиваются с ростом скоростей вращения и качения роторов, то после преодоления всех сил сопротивления (трение, электродинамические силы ...) вращающиеся роторы 12 выходят на режим свободного инерциального вращения (т. е. на режим равенства нулю момента внешних сил относительно центра инерции тела), после чего происходит дальнейшее увеличение угловых скоростей 17 17(ωт) роторов 12 и 21 21(ω) сепаратора 18, т.е. генерирование механической энергии.
Включением управляемых муфт 26 обеспечивается отвод генерируемой энергии от материальных тел (роторов) 12 и сепаратора 18 к ее потребителям 27.
При предварительной раскрутки роторов 12 и при подкключении нагрузки - потребителей 27 механической энергии в устройстве (генераторе) возникают дополнительные силы, тормозящие роторы 12 и сепаратор 18. Эти силы обусловлены рассмотренными выше затратами энергии на сопровождающее описываемый процесс генерирования механической энергии униполярное генерирование электрической энергии [16, стр. 549-553] и на образование токов Фуко.
Однако, поскольку конструкция генератора (см. , например, фиг. 5, 6) может обеспечить концентрацию и замыкание силовых линий магнитного поля 29(B) по массе магнитов 33(32), полюсных наконечников 37 и элементов (стержней 38) магнитной системы, то в зоне 4 (как указано выше) величина индукции магнитного поля 29(B) оказывается существенно пониженной, и, следовательно, малы потери энергии при ее генерировании, эффективность процессе генерирования механической энергии высока.
Тот же результат тем же методом достигается и при выполнении обмотки 35 в виде двух коаксиально расположенных осесимметричных соленоидов (в соответствии с п. 15 формулы изобретения), поскольку из-за различия в радиальных размерах этих соленоидов, а также вследствие возможности пропускания по ним разных по направлению токов во внутренней полости 9 магнитной системы генератора создается зона с пониженным значением индукции суммарного от наружного и от внутреннего соленоидов магнитного поля.
В случае выполнения магнитной системы генератора в виде тороидальной токовой обмотки (фиг. 7, пп. 16, 17 формулы изобретения) при запитке током тороидальной токовой обмотки 39 (или ее элементов 40, 41) в генераторе создается магнитное поле, вектор-потенциал 1(A) которого располагается в плоскостях, перпендикулярных оси 8 тороида.
Для получения энергии устройство располагают в пространстве таким образом, чтобы обеспечить создание в по крайней мере одной из областей размещения роторов 12 (во внутренней полости 9 магнитной системы-тороида 39(40, 41)) области 4 с пониженным по отношению к величине космологического векторного потенциала 2(Aг) значением суммарного векторного потенциала 2(Aсум).
Это осуществляется, например, путем ориентирования касательной к оси 8 магнитной системы тороида (или осей 3 вращения ров 12) перпендикулярно направлению космологического вектор-потенциала 2(Aг) (или, что равнозначно, путем ориентирования плоскости, в которой образующая окружность тороида 39(40, 41) располагается перпендикулярно оси вращения по крайней мере одного из материальных тел (роторов) 12, параллельно вектору 2(Aг) космологического векторного потенциала).
Включив муфты 23, системами 24 через валы 22, 19, вращая, сепараторы 18 в направлении 20, осуществляют путем качения по внутренней поверхности 10 внутренней полости 9 тороидальной магнитной системы материальных тел (роторов) 12, установленных в сепараторах 18, их предварительную, раскрутку в направлении 16.
После преодоления всех сил сопротивления и выхода вращающихся роторов 12 и сепараторов 18 на режим свободного инерциального вращения происходит (за счет действия сил 42(F) и 43(Fд) дальнейшее увеличение угловой скорости роторов 12, сепараторов 18 и вращаемых ими в направлении 20 валов 19 и 25, т.е. генерирование механической энергии.
Включением управляемых муфт 26 обеспечивается отвод генерируемой энергии от материальных тел (роторов) 12 и сепараторов 18 к ее потребителям 27.
Выполнение материальных тел (роторов) 12 (или части массы этих материальных тел) из вещества с достаточно большой плотностью (не менее 8000 кг/м3, например, из тантала) дает возможность увеличить в единице объема материальных тел количество частиц, на которые действуют силы 2(F) и 43(Fд), и вследствие этого уменьшить габаритные размеры генератора (или при сопоставимых размерах повысить его силовые, а следовательно, и энергетические характеристики).
Проведенные предварительные исследования подтвердили реализуемость заложенных в изобретение физических принципов.
Источники информации
1. "Астронавтика и ракетодинамика", "Экспресс-информация", - М.: изд. ВИНИТИ, 1981 г., N 39, с. 22-24.
2. Ю.А.Бауров, В.М.Огарков
"Способ перемещения объекта в пространстве и устройство для его осуществления", Патент Российской Федерации N 2023203 от 15.11.94 г., (Заявка РФ N 4881920/07 от 11.11.90 г. , международная заявка N PCT/RU92/00180 от 30.09.92 г. , номер международной публикации: WO 94/08137 от 14.04.94 г.), МПК: F 03 G 7/00, H 02 K 57/00, B 64 G 1/40.
3. Ю. А.Бауров, Ю.Н.Бабаев, В.К.Аблеков "Об одной модели слабого, сильного и электромагнитного взаимодействия", "Доклады Академии Наук", 1981 г., т. 259, N5, стр. 1080.
4. Ю. А. Бауров, Ю. Н.Бабаев, В.К. Аблеков "О неоднозначности скорости распространения электромагнитного поля", "Доклады Академии Наук", 1982 г., т. 262, N1, стр. 68.
5. Ю.А.Бауров, Ю.Н.Бабаев, В.К.Аблеков "Электромагнитный вакуум и сильные взаимодействия", "Доклады Академии Наук", 1982 г., т. 265, N5, стр. 1108.
6. Ю. Н. Бабаев, Ю.А.Бауров "О происхождении фундаментальных констант и некоторых квантовых числе", Препринт ИЯИ АН СССР, П-0362, М., 1984 г.
7. Ю. Н.Бабаев, Ю.А.Бауров "Нейтрино в дискретном пространстве и космология", Препринт ИЯИ АН СССР, П-0386, Москва, 1985 г.
8. Ю.А.Бауров "О структуре пространства и происхождения волновых свойств частиц", "Астрофизические проявления предполагаемой структуры физического вакуума".
В сборнике: "Физика плазмы и некоторые вопросы общей физики", Сборник научных трудов ЦНИИМАШ, 1990 г., стр. 71-83, 84-91.
9. Ю. А.Бауров, Е.Ю.Клименко, С.И.Новиков "Экспериментальное наблюдение магнитной анизотропии пространства", "Доклады Академии Наук СССР", 1990 г., т. 315, N 5, стр. 1116-1120. УДК 539.12.01.
10. Yu.A.Baurov, E.Yu.Klimenko, S.I.Novikov "Experimental observation of space magnetic anisotropy", Phisics Letters A 162 (1992), p. 32-34, North-Holland.
11. Ю. А. Бауров, П. М.Рябов "Экспериментальные исследования магнитной анизотропии пространства с помощью кварцевых пьезорезонансных весов", "Доклады Академии Наук", 1992 г., т. 326, N1, стр. 73-77.
10. Yu. A.Baurov, "Space magnetic anisotropy and new interaction in nature" Phisics Letters A 181 (1993), p. 283-288, North-Holland.
13. Ю. А. Бауров, Б.М.Серегин, А.В.Черников "Экспериментальные исследования взаимодействия сильноточных систем с физическим вакуумом и реализация нового принципа движения", "Физическая мысль России", N1, 1994 г., август, стр. 1 - 6.
14. Ю.А.Бауров, В.Г.Вержиковский "Экспериментальные исследования нового взаимодействия в природе с помощью центробежных стендов", "Физическая мысль России", N1, 1995 г.
15. Ю. А. Бауров, В.М.Огарков "Способ генерации механической энергии и устройство для его осуществления", Заявка РФ N 93-013725/06 (012777) от 12.03.93 г. , положительное решение от 24.01.95 г., прототип, МПК F 03 G 7/00.
16. И. Е. Тамм "Основы теории электричества", М.:изд. "Наука", Главная редакция физико-математической литературы, 8-е изд., 1996 г.
17. У.Чайлдс "Физические постоянные", справочное пособие, пер. с англ., -М.: Государственное издательство физико-математической литературы, 2-е издание, 1962 г., стр. 22-23.
18. Д. А.Франк-Каменецкий "Плазма - четвертое состояние вещества",- М.: Госатомиздат , 2-е издание, 1963 г., стр. 134-136.
19. Советский энциклопедический словарь", гл. редактор А.М.Прохоров, изд.= М.:"Советская энциклопедия", 4-е издание, 1987 г., стр. 1202.
20. Б.М.Яворский, А.А.Детлаф "Справочник по физике для инженеров и студентов ВУЗов" -М.: Наука, Главная редакция физико-математической литературы, 4-е изд., 1968 г.
21. I. R. Walker "Verification of the Aharonov-Bohm effect in superconductors by use of toroidal flux geometry", Physical Reviev B, V33, N 7, p. 5028-5029 (1986).
Способ и устройство предназначены для использования в двигательных (тяговых) системах для перемещения в пространстве и для преобразования механической энергии. Изобретение реализуется путем создания в генераторе поля суммарного векторного потенциала Асум равного сумме основного поля векторного потенциала А тока и поля космологического векторного потенциала Аг, с пониженным по отношению к величине космологического векторного потенциала Аг значением суммарного векторного потенциала Асум путем ориентирования вектора основного поля векторного потенциала А тока под углом от 90o до 270o к вектору космологического векторного потенциала Аг , размещения и перемещения материальных тел, механически связанных с потребителями механической энергии, в указанном поле суммарного векторного потенциала Асум , при котором материальные тела подвергают раскручивающему воздействию вокруг осей, перпендикулярных плоскостям, в которых расположены векторы основного поля векторного потенциала А тока и поля космологического векторного потенциала Аг до достижения каждым из тел режима равенства нулю момента внешних сил относительно центра инерции тела и последующего снятия указанного раскручивающего воздействия и подсоединения к вращающимся материальным телам потребителей механической энергии, создают связанные с материальными телами дополнительные поля векторного потенциала Ад тока, векторы Ад которого ориентируют по крайней мере частично, под углом 90 - 270o к вектору космологического векторного потенциала Аг, и осуществляют перемещение указанных материальных тел путем их качения по замкнутой траектории, располагаемой по крайней мере частью своей длины в поле упомянутого суммарного векторного потенциала Асум, в направлении, ориентированном по крайней мере на части траектории движения материальных тел под углом 0 - ±90o к направлению вектора космологического векторного потенциала Аг. Изобретение позволяет повысить КПД и упростить конструкцию. 2 с. и 22 з.п. ф-лы, 7 ил.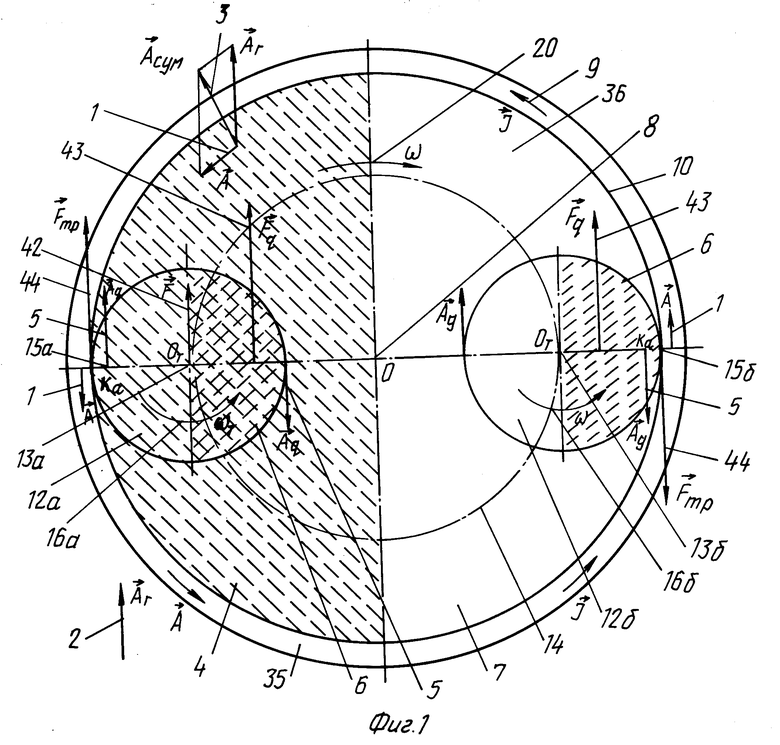
| RU 93013725 A1, 27.06.95 | |||
| СПОСОБ ПЕРЕМЕЩЕНИЯ ОБЪЕКТА В ПРОСТРАНСТВЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2023203C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ДЛЯ ОКОЛОЗЕМНЫХ И КОСМИЧЕСКИХ ПОЛЕТОВ | 1991 |
|
RU2030339C1 |
| ДЕТЕКТИРОВАНИЕ РЕНТГЕНОВСКОГО ИЗЛУЧЕНИЯ ИНТЕРФЕРЕНЦИОННОЙ КАРТИНЫ В ПАДАЮЩЕМ РЕНТГЕНОВСКОМ ИЗЛУЧЕНИИ ПРИ ФАЗОВО-КОНТРАСТНОЙ И/ИЛИ ТЕМНОПОЛЬНОЙ РЕНТГЕНОВСКОЙ ВИЗУАЛИЗАЦИИ | 2018 |
|
RU2721153C1 |
| Автоматический огнетушитель | 0 |
|
SU92A1 |

