Изобретение относится к космической навигации, преимущественно в дальнем космосе, и может быть использовано в системах получения информации о навигационных параметрах космического аппарата относительно выбранной системы координат.
Известен способ инерциальной навигации космического аппарата, в соответствии с которым навигационные параметры аппарата, а именно координаты его местоположения, а также составляющие векторов скорости и ускорения, определяют интегрированием измеряемых в процессе движения космического аппарата составляющих указанных навигационных параметров (см., например, [1 - 5]).
В любом устройстве для осуществления способа инерциальной навигации как правило осуществляется три типа измерений, для каждого из которых используются свои приборы:
а) при измерении угловой скорости или направлении - гироскопические приборы; б) при измерении линейного ускорения - подвешенные инертные массы в аксельрометрах, в) при измерении времени - прецизионные источники стабилизированной частоты [5, стр.67]. Типичные примеры устройства и его элементов приведены, например, в [5, стр.171-216].
Основным недостатком такого способа и реализующих его устройств является нарастание с течением времени ошибок счисления результирующих данных о значении вектора навигационного состояния космического аппарата, что вызвано интегрированием ошибок измерений векторов скорости и ускорения аппарата.
В связи с тем, что по способу инерциальной навигации координаты и скорость объекта определяют путем интегрирования, требуется точное знание начальных значений этих величин.
Инерциальная система навигации не может почувствовать отклонений траектории от прогнозируемой, вызванных недостаточным знанием гравитационных сил.
На орбитальном и межпланетном участках космического полета инерциальные чувствительные элементы навигационной системы не в состоянии выработать информацию о местоположении космического аппарата (из-за отсутствия или из-за малости внешних (негравитационных) сил).
Вследствие вышеизложенного, местоположение и скорость космического корабля, полученные с помощью способа инерциальной навигации и устройств для его осуществления, следует периодически приводить в соответствии с данными радиолокационных или оптических наблюдений, произведенных с помощью наземных или бортовых средств (т. е. необходимо осуществлять навигационные сверки) (см., например, [5, стр.67-68, 146]).
Известен также способ геомагнитной навигации космического аппарата, включающий в себя сопоставление физических параметров магнитного поля, измеренных датчиками геомагнитной информации на борту объекта, с аналогичными параметрами магнитного поля, распределение которых в пространстве относительно Земли заранее известно (априорная информация) (см., например, [6]). Априорная информация о магнитном поле Земли фиксируется на географических картах с учетом высоты полета, а также в таблицах, в системах памяти ЭВМ или в аналитической форме.
Устройство для осуществления этого способа (система геомагнитной навигации) включает в себя датчики геомагнитной информации, датчики угловой информации, системы сравнения, коррекции, вычисления и выдачи выходных сигналов (см., например, [6, стр. 9, рис B. 1]).
Основными достоинствами геомагнитной навигации являются автономность измерений и большой объем выходной информации, которая может быть получена при определенной организации и обработке измерений.
Недостатком способа геомагнитной навигации и реализующих его устройств является то, что они могут быть использованы только при полетах в ближнем космосе на относительно небольшом удалении от Земли.
К существенным недостаткам этого способа следует отнести также и наличие изменений в широких пределах информационных свойств магнитного поля Земли в зависимости от географической широты и расстояния от планеты. Кроме того, параметры магнитного поля меняются во времени по случайному закону в зависимости от ряда физических причин (см. [6, стр.6]). Все это влияет на точность геомагнитной навигации и ограничивает область применения реализующих этот способ устройств.
Наиболее близким по технической сущности и достигаемому результату к предлагаемому изобретению является пригодный для осуществления полетов в относительно дальнем космосе способ астрономической навигации космического аппарата, включающий в себя выбор базового физического объекта (звезды или планеты), определение (визирование) направления в пространстве, соответствующего выбранному базовому объекту, по отношению к координатным осям космического аппарата (определение углового параметра базового объекта) и использование указанного направления в качестве одной из осей системы координат при определении положения космического аппарата.
Точку текущего местоположения космического аппарата находят путем выполнения одновременно по крайней мере трех измерений угловых параметров базовых объектов и определения трех поверхностей положения, пересекающихся в искомой точке (см. [7, стр.9 - прототип "Способа..."]).
Устройство для осуществления этого способа (система астронавигации) содержит датчики обнаружения и регистрации базового физического объекта, систему сканирования этими датчиками пространства, вычислительное оборудование (см. [7, стр.24, рис.5 - прототип "Устройства..."]).
Особенности конструкции отдельных элементов и конкретных систем астронавигации в целом и описание приемов технологии осуществления астронавигационных оптических измерений приведены также, например, в [5, стр. 95-101, 217-242], [7, стр.23-37).
Недостатком прототипов - астрономического способа навигации и устройства для его осуществления является то, что область их применения ограничена лишь той частью Галактики и Солнечной системы, в которой нам в настоящее время точно известна карта звездного неба и ее изменения, происходящие при перемещении космического аппарата.
В дальнем и сверхдальнем космосе этот способ и соответствующие устройства практически неприменимы, поскольку здесь уже несправедливо допущение о существовании так называемых "неподвижных" относительно аппарата звезд и их использование для определения поверхностей положения аппарата (как, например, широко используется в ближнем космосе звезда Канопус [8, стр.194] и т. п.) может привести к существенным ошибкам в вычислении значения вектора навигационного состояния космического аппарата.
Но и при полетах в ближнем космосе оказывается желательным использование для определения положения аппарата в пространстве дополнительного, принципиально нового природного естественного физического фактора, независимого от всех ранее применявшихся базовых физических объектов, поскольку это позволяет повысить точность навигационных операций.
Целью предлагаемого изобретения является устранение отмеченного недостатка прототипов и создание способа навигации космического аппарата и устройства для его осуществления с расширенной областью применения, обеспечивающих повышение точности при определении вектора навигационного состояния космического аппарата.
Эта цель достигается за счет того, что при выполнении навигационных операций, включающих выбор базового физического объекта, определение направления в пространстве, соответствующего выбранному базовому объекту по отношению к координатным осям космического аппарата и использование указанного направления в качестве одной из осей опорной системы координат при определении положения космического аппарата, в качестве базового физического объекта выбирают поле суммарного векторного потенциала Aсум тока, равного сумме поля космологического векторного потенциала Aг, полей векторного потенциала Aп, тока природных источников векторного потенциала и поля векторного потенциала A тока одного или более искусственных источников векторного потенциала, создают в локальной области пространства указанное поле векторного потенциала A тока и воздействуют этим полем на поле космологического векторного потенциала Aг, создавая при этом воздействии в упомянутой локальной области пространства поле указанного суммарного векторного потенциала Aсум с пониженным по отношению к величине космологического векторного потенциала Aг значением, получают и регистрируют физические эффекты, обусловленные созданием и существованием в пространстве области поля упомянутого суммарного векторного потенциала Aсум с пониженным значением и его изменениями и определяют по указанным эффектам направление поля суммарного векторного потенциала Aсум.
В соответствии с изобретением воздействие полем векторного потенциала A тока искусственного источника векторного потенциала на поле космологического векторного потенциала Aг осуществляют путем сканирования полем векторного потенциала A тока искусственного источника векторного потенциала пространства в диапазоне углов от 0o до 360o по отношению к одной из координатных осей космического аппарата.
В альтернативном варианте изобретения воздействие полем векторного потенциала A тока искусственных источников векторного потенциала на поле космологического векторного потенциала Aг осуществляют путем создания в пространстве этими источниками стационарной системы полей, направленных в диапазоне углов от 0 до 360o по отношению к одной из координатных осей космического аппарата.
При этом получение и регистрацию упомянутых физических эффектов, обусловленных созданием и существованием в локальной области пространства указанного поля суммарного векторного потенциала Aсум с пониженным по отношению к величине космологического векторного потенциала Aг значением суммарного векторного потенциала Aсум и определение направления поля суммарного векторного потенциала Aсум, осуществляют либо путем размещения в указанной области пространства по крайней мере одного материального тела и регистрации величин и направлений сил F, возникающих при воздействии полей векторного потенциала тока на физический вакуум и действующих на указанное тело в поле упомянутого суммарного векторного потенциала Aсум, при этом за направление поля суммарного векторного потенциала Aсум принимают направление, соответствующее направлению в пространстве максимальной из зарегистрированных указанных сил F, действующих на упомянутое материальное тело, либо путем размещения в указанной локальной области пространства по крайней мере одного материального тела, содержащего радиоактивное вещество, и регистрации активности и изменения активности распада радиоактивного вещества вследствие воздействия на него поля упомянутого суммарного векторного потенциала Aсум, при этом за направление поля суммарного векторного потенциала Aсум принимают направление, противоположное направлению в пространстве векторного потенциала A тока искусственного источника векторного потенциала, при котором зарегистрирована минимальная активность распада радиоактивного вещества.
В последнем случае в качестве радиоактивного вещества используют вещества, обладающие способностью к бета-распаду.
В соответствии с изобретением поле векторного потенциала A тока искусственного источника векторного потенциала в локальной области пространства создают либо путем размещения в указанной области пространства постоянных магнитов, либо путем пропускания электрического тока I по токоведущим элементам, расположенным в указанной области пространства.
В последнем случае воздействие полем векторного потенциала A тока искусственного источника векторного потенциала на поле космологического векторного потенциала Aг осуществляют, например, путем сканирования полем векторного потенциала A тока искусственного источника векторного потенциала пространства в диапазоне углов от 0o до 180o по отношению к одной из координатных осей космического аппарата, после чего изменяют направление пропускаемого электрического тока на противоположное и повторяют операцию сканирования пространства в том же диапазоне углов от 0 до 180o по отношению к той же координатной оси космического аппарата.
Для осуществления этих операций заявляемого "Способа..." в устройстве ("Навигационном приборе"), содержащем датчики обнаружения и регистрации базового физического объекта, систему сканирования пространства и систему определения положения датчиков по отношению к координатным осям космического аппарата, датчики обнаружения и регистрации базового физического объекта механически связаны с системой сканирования пространства и выполнены в виде систем создания в локальной области пространства поля векторного потенциала A тока искусственных источников векторного потенциала и размещенных в указанной области пространства средств для регистрации физических эффектов, обусловленных созданием и существованием в пространстве локальной области поля суммарного потенциала Aсум, равного сумме поля космологического векторного потенциала Aг, полей векторного потенциала Aп тока природных источников векторного потенциала и полей векторного потенциала A тока искусственных источников векторного потенциала с пониженным по отношению к величине космологического векторного потенциала Aг значением суммарного векторного потенциала Aсум и его изменениями.
В соответствии с изобретением система создания в локальной области пространства поля векторного потенциала A тока искусственных источников векторного потенциала может быть выполнена либо в виде соленоида, обмотка которого подсоединена к источнику электрического тока, либо в виде тороида, обмотка которого подсоединена к источнику электрического тока, либо в виде набора постоянных магнитов.
Входящие в датчик обнаружения и регистрации базового физического объекта средства для регистрации физических эффектов, обусловленных созданием и существованием в пространстве локальной области поля суммарного потенциала Aсум с пониженным по отношению к величине космологического векторного потенциала Aг значением суммарного векторного потенциала Aсум и его изменениями, могут быть выполнены:
- либо в виде размещенного в указанной локальной области пространства по крайней мере одного материального тела, механически связанного с датчиком величин и направлений сил F, возникающих при воздействии полей векторного потенциала тока на физический вакуум и действующих на указанное материальное тело в поле упомянутого суммарного векторного потенциала Aсум (в этом случае по крайней мере часть материального тела, механически связанного с датчиком величин и направлений сил F, наиболее целесообразно выполнять из вещества с плотностью не менее 8000 кг/м3),
- либо в виде размещенного в указанной локальной области пространства по крайней мере одного материального тела, содержащего радиоактивное вещество, и датчика активности и изменения активности распада радиоактивного вещества вследствие воздействия на него поля упомянутого суммарного векторного потенциала Aсум.
При этом средства для регистрации физических эффектов, обусловленных созданием и существованием в пространстве локальной области поля суммарного потенциала Aсум. с пониженным по отношению к величине космологического векторного потенциала Aг значением суммарного векторного потенциала Aсум. и его изменениями, могут быть размещены как во внутренней полости, так и снаружи системы создания в локальной области пространства поля векторного потенциала A тока искусственных источников векторного потенциала.
Упомянутые средства для регистрации физических эффектов, обусловленных созданием и существованием в пространстве локальной области поля суммарного потенциала Aсум. с пониженным по отношению к величине космологического векторного потенциала Aг значением суммарного векторного потенциала Aсум. и его изменениями, могут быть установлены в системе создания в локальной области пространства поля векторного потенциала A тока искусственных источников векторного потенциала как с возможностью их перемещения относительно указанной системы и/или друг друга, так и механически жестко относительно указанной системы.
В последнем случае эти средства размещают в диапазоне углов от 0 до 360o по отношению к одной из координатных осей космического аппарата.
В соответствии с изобретением система сканирования пространства может быть выполнена как в виде устройства вращения датчика обнаружения и регистрации базового физического объекта в двух взаимно перпендикулярных плоскостях и системы определения суммарного угла поворота указанного датчика по отношению к одной из координатных осей космического аппарата, так и связана с системой многочисленных датчиков обнаружения и регистрации базового физического объекта, размещенных на замкнутой пространственной поверхности таким образом, что векторы A систем создания в локальной области пространства поля векторного потенциала A тока искусственных источников векторного потенциала указанных датчиков ориентированы в диапазоне углов от 0 до 360o по отношению к одной из координатных осей космического аппарата, либо в виде токовой обмотки, размещенной на замкнутой пространственной поверхности таким образом, что направления отдельных элементов указанной обмотки (а следовательно, и векторы I токов, пропускаемых по этим элементам) ориентированы в диапазоне углов от 0 до 360o по отношению к одной из координатных осей космического аппарата.
Упомянутая замкнутая пространственная поверхность может быть выполнена любой формы; наиболее оптимально выполнение этой поверхности в форме сферы либо в форме тороида.
При реализации "Способа. . ." и выполнении устройства ("Навигационного прибора") для его осуществления указанным образом регистрируется и определяется в пространстве направление нового природного фактора - поля суммарного векторного потенциала Aсум, которое в основном (по величине и по направлению) определяется полем космологического векторного потенциала Aг, существующим и имеющим по современным представлениям постоянное направление в области по меньшей мере всей Солнечной системы (см., например, [9 - 21]); направление поля суммарного векторного потенциала Aсум и используется в качестве одной из осей опорной системы координат при определении положения космического аппарата.
Изобретение соответствует критериям патентоспособности:
- критерию новизны, поскольку предложенное техническое решение не известно из современного уровня техники (отсутствуют сведения об аналогах с использованием для целей навигации полей векторных потенциалов Aг и Aсум., ставшие общедоступными до даты приоритета изобретения);
- критерию наличия изобретательского уровня, поскольку оно для специалиста явным образом не следует из уровня техники (основано на новых физических принципах и явлениях - см., например, [9-12, 27-29]);
- критерию промышленной применимости, поскольку получено опытное экспериментальное подтверждение существования новых физических явлений, на которых базируется изобретение (см., например, [13 - 21]).
Сущность изобретения поясняется при рассмотрении чертежа, на котором:
на фиг. 1 приведена принципиальная схема, поясняющая взаимное расположение координатных осей космического аппарата, осей опорной системы координат и одного из вариантов направлений полей векторных потенциалов Aг, Aп и A и соответствующего им Aсум при определении положения космического аппарата в соответствии с предлагаемым "Способом...";
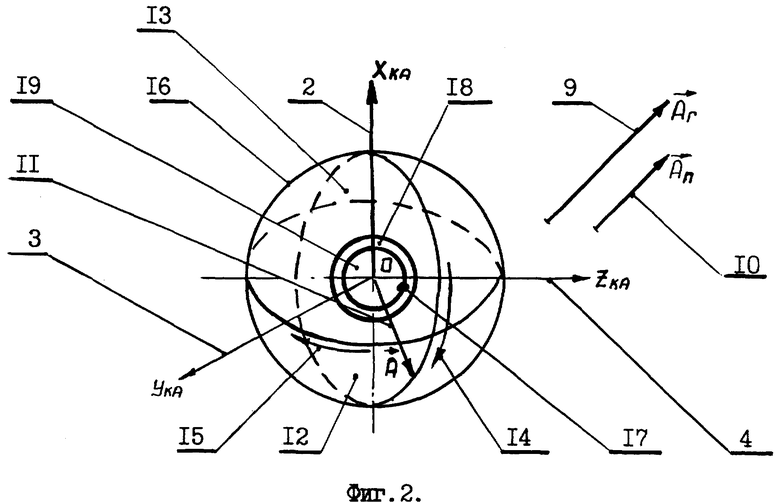
на фиг. 2 приведена схема, поясняющая принцип реализации предлагаемого "Способа. . . " при воздействии полем векторного потенциала A тока искусственного источника векторного потенциала на поле космологического векторного потенциала Aг путем сканирования полем векторного потенциала A тока пространства в диапазоне телесных углов от 0 до 360o по отношению к одной из координатных осей космического аппарата (в соответствии с п.2 формулы изобретения);
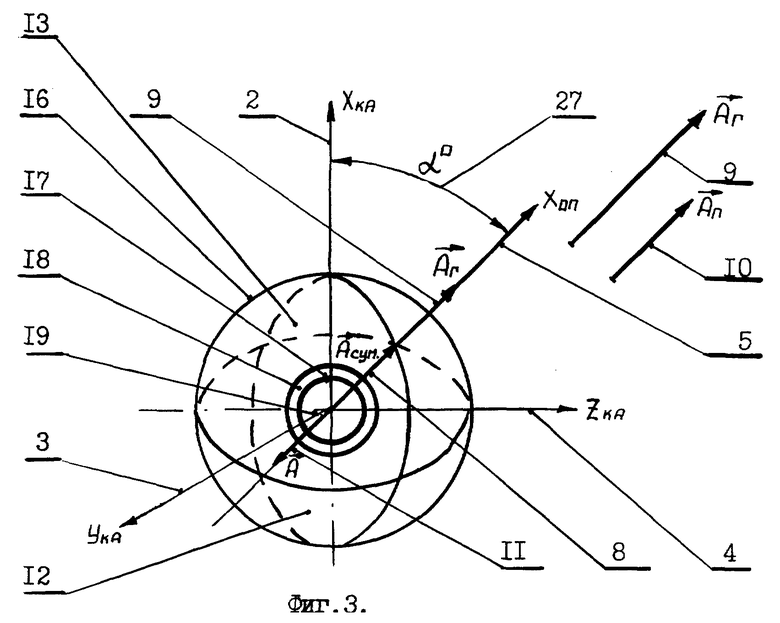
на фиг. 3 показан вариант взаимного расположения направлений полей векторных потенциалов Aг, Aп и A, при котором происходит определение искомого при осуществлении предлагаемого "Способа. .." направления поля суммарного векторного потенциала Aсум;
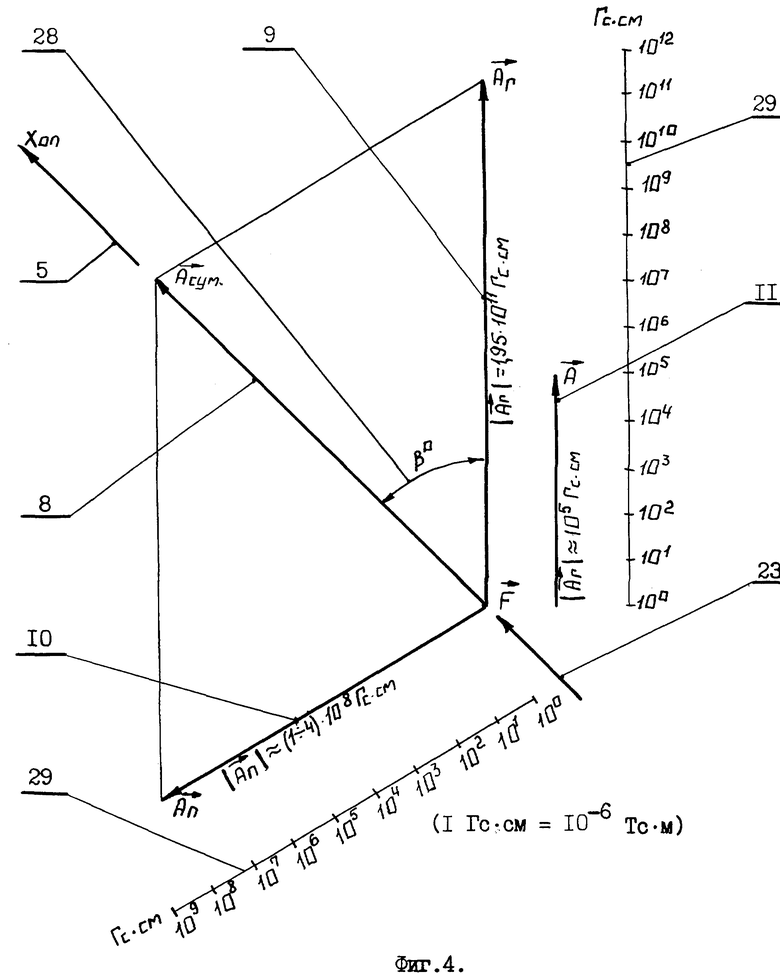
на фиг. 4 изображена векторная диаграмма, поясняющая принцип взаимодействия в природе поля космологического векторного потенциала Aг и поля векторного потенциала Aп тока природных источников векторного потенциала и формирования при этом взаимодействии поля суммарного векторного потенциала Aсум. тока, равного сумме поля космологического векторного потенциала Aг и поля векторного потенциала Aп тока природных источников векторного потенциала с указанием характерных существующих в природе и создаваемых искусственно величин численных значений модулей вектор-потенциалов Aг, Aп и A, а также с указанием направления регистрируемой в иллюстрируемом на фиг. 4 варианте взаиморасположения вектор-потенциалов Aг, Aп и A силы F, возникающей при воздействии полей векторного потенциала тока на физический вакуум и действующей на материальные тела в поле суммарного векторного потенциала Aсум;
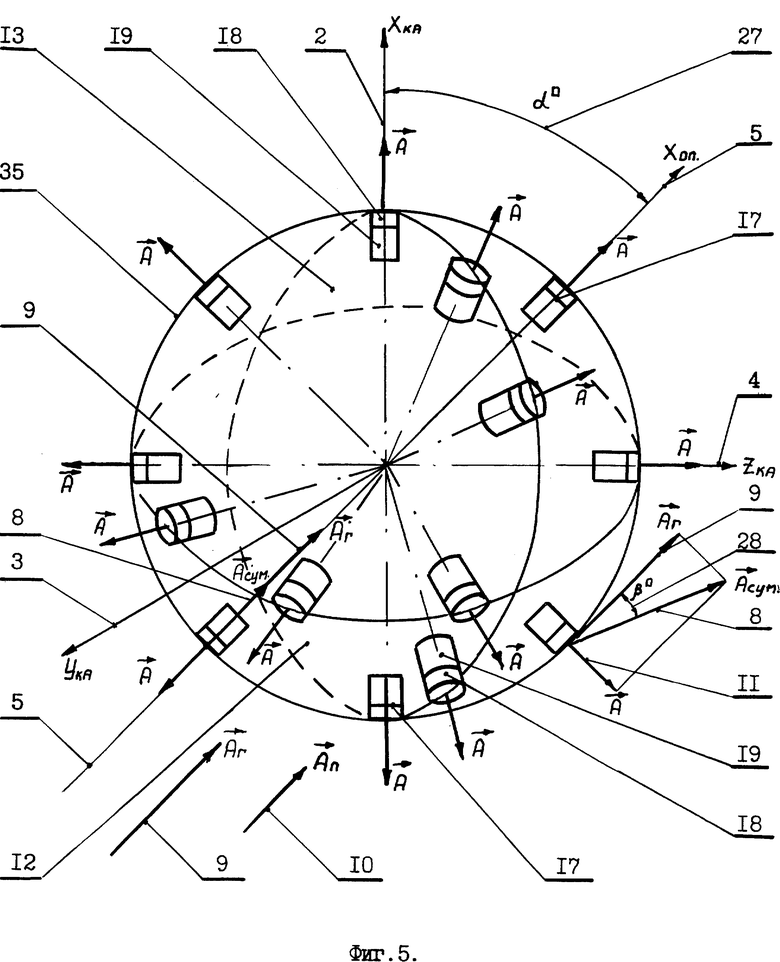
на фиг. 5 приведена схема, поясняющая принцип реализации предлагаемого "Способа. . . " при воздействии полем векторного потенциала A тока искусственного источника векторного потенциала на поле космологического векторного потенциала Aг путем создания в пространстве стационарной системы полей векторного потенциала A тока, направленных в диапазоне телесных углов от 0 до 360o по отношению к одной из координатных осей космического аппарата (в соответствии с п.3 формулы изобретения);
кроме того, фиг. 5 иллюстрирует принцип осуществления конструкции устройства - навигационного прибора, в котором система сканирования пространства выполнена в виде системы многочисленных датчиков обнаружения и регистрации базового физического объекта, размещенных на замкнутой сферической пространственной поверхности таким образом, что векторы A систем создания в локальной области пространства полей векторного потенциала A тока указанных датчиков ориентированы в диапазоне телесных углов от 0 до 360o по отношению к одной из координатных осей космического аппарата - в соответствии с пп. 23, 25 формулы изобретения;
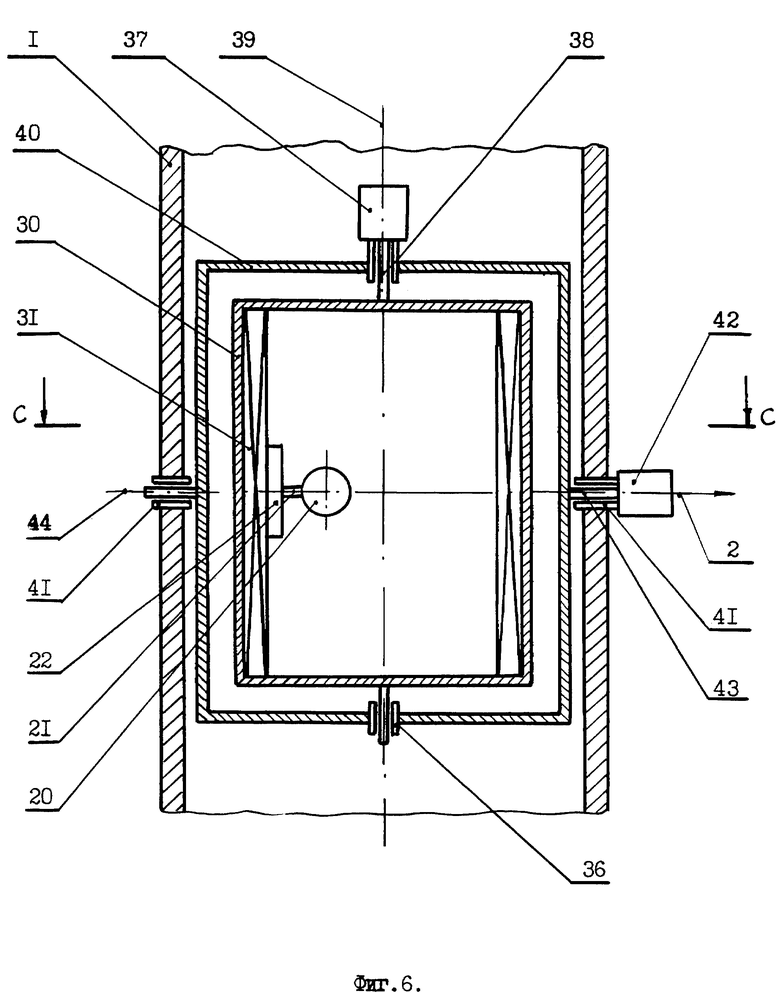
на фиг. 6 приведена принципиальная схема конструкции устройства - навигационного прибора, в котором система сканирования пространства выполнена в виде устройства вращения датчика обнаружения и регистрации базового физического объекта в двух взаимно перпендикулярных плоскостях, связанного с системой определения положения датчика по отношению к координатным осям космического аппарата (в соответствии с п.22 формулы изобретения), а сам датчик выполнен в виде соленоида, обмотка которого подсоединена к источнику электрического тока (в соответствии с п.11 формулы изобретения) и во внутренней полости которого (в соответствии с п. 17 формулой изобретения) размещено материальное тело, механически связанное с датчиком величин и направлений сил F, возникающих при воздействии полей векторного потенциала тока на физический вакуум и действующих на указанное материальное тело в поле суммарного векторного потенциала Aсум (в соответствии с п. 14 формулы изобретения);
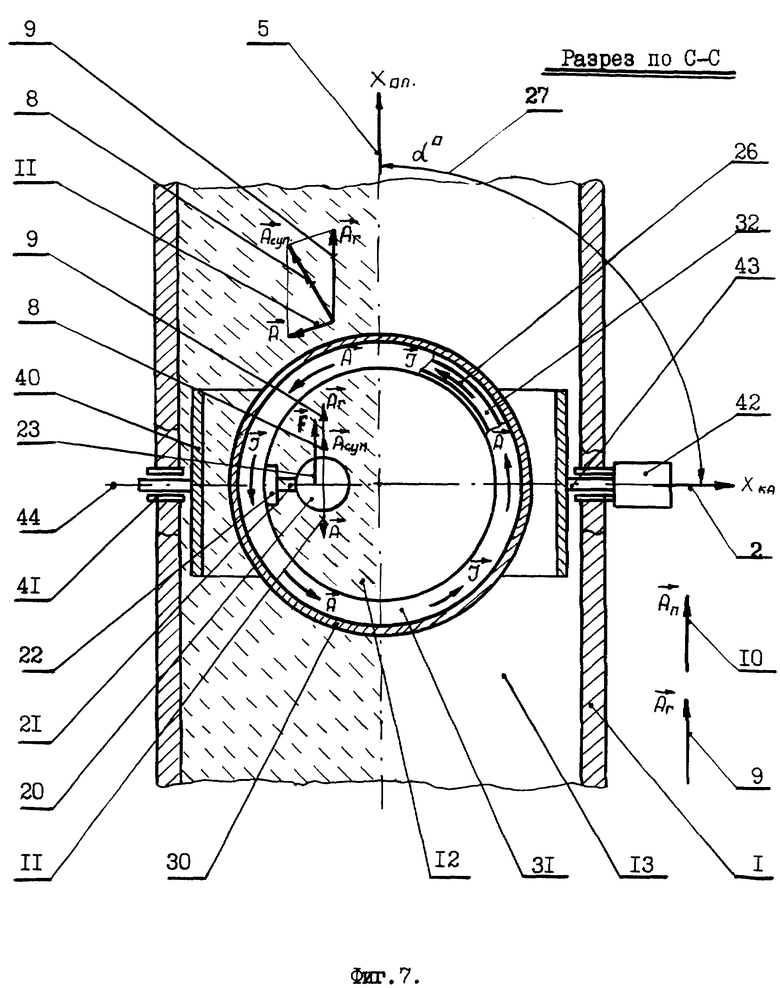
на фиг. 7 показан разрез С-С навигационного прибора на фиг. 6 с указанием варианта взаимного расположения направлений полей векторных потенциалов Aг, Aп и A, поля суммарного потенциала Aсум и направления вектора силы F, действующей на материальное тело в поле суммарного векторного потенциала Aсум;
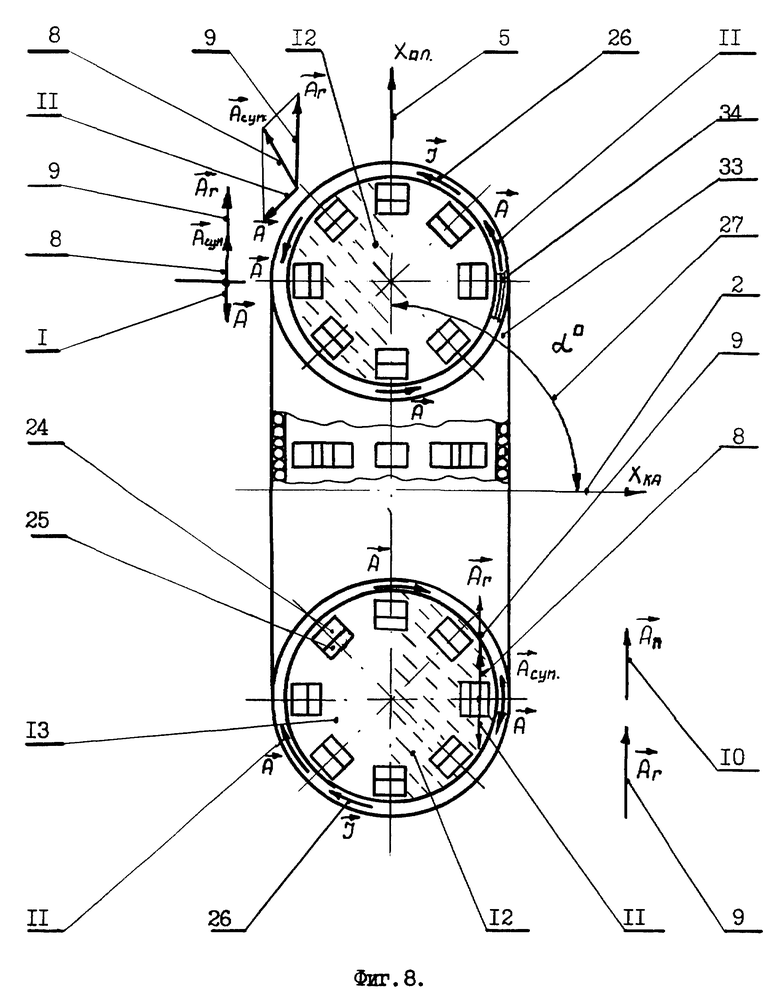
на фиг. 8 приведена принципиальная схема конструкции устройства - навигационного прибора, в котором система сканирования пространства выполнена в виде токовой обмотки, размещенной на замкнутой пространственной поверхности (на поверхности тороида) таким образом, что направления отдельных элементов указанной обмотки (а соответственно и векторы I пропускаемых по ним токов) ориентированы в диапазоне телесных углов от 0 до 360o по отношению к одной из координатных осей космического аппарата (в соответствии с пп. 24, 26 формулы изобретения), а средства для регистрации физических эффектов, обусловленных созданием и осуществлением в пространстве локальной области поля суммарного потенциала Aсум с пониженным по отношению к величине космологического векторного потенциала Aг значением суммарного векторного потенциала Aсум и его изменениями, размещены во внутренней области тороида (в соответствии с п. 17 формулы изобретения) в диапазоне телесных углов от 0 до 360o по отношению к одной из координатных осей космического аппарата (в соответствии с п. 21 формулы изобретения) и выполнены любо в виде набора материальных тел, механически связанных с датчиками величины и направлений сил F, возникающих при воздействии полей векторного потенциала тока на физический вакуум и действующих на указанные материальные тела в поле упомянутого суммарного векторного потенциала Aсум (в соответствии с п. 14 формулы изобретения), либо в виде набора материальных тел, содержащих радиоактивное вещество, и датчиков активности и изменения активности распада радиоактивного вещества вследствие воздействия на него поля упомянутого суммарного векторного потенциала Aсум (в соответствии с п. 16 формулы изобретения).
На чертеже обозначено:
поз. 1 - космический аппарат (указан на фиг. 1, 6, 7);
поз. 2 - координатная ось абсцисс (Xка) космического аппарата (фиг. 1, 2, 3, 5, 6, 7, 8);
поз. 3 - координатная ось ординат (Yка) космического аппарата (фиг. 1, 2, 3, 5);
поз. 4 - координатная ось аппликат (Zка) космического аппарата (фиг. 1, 2, 3, 5);
поз. 5 - ось абсцисс (Xоп) опорной системы координат (фиг. 1, 3, 4, 5, 7, 8);
поз. 6 - ось ординат (Yоп) опорной системы координат (фиг. 1);
поз. 7 - ось аппликат (Zоп) опорной системы координат (фиг. 1);
поз. 8 - суммарный вектор-потенциал (Aсум) тока, равный сумме космологического векторного потенциала 9(Aг), векторного потенциала 10(Aп) тока природных источников векторного потенциала и векторного потенциала 11(A) тока искусственных источников векторного потенциала, характеризующий величину и направление в пространстве поля Aсум (фиг. 1, 3, 4, 5, 7, 8);
поз. 9 - космологический вектор-потенциал (Aг), характеризующий величину и направление в пространстве поля Aг (фиг. 1, 2, 3, 4, 5, 7, 8);
поз. 10 - вектор-потенциал (Aп) тока природных источников векторного потенциала, характеризующий величину и направление в пространстве поля Aп (фиг. 1, 2, 3, 4, 5, 7, 8);
поз. 11 - вектор-потенциал A тока искусственных источников векторного потенциала, характеризующий величину и направление в пространстве поля A (фиг. 1, 2, 3, 4, 5, 7, 8);
поз. 12 - область пространства с пониженным по отношению к величине космологического векторного потенциала 9(Aг) значение суммарного векторного потенциала 8(Aсум) (на фиг. 7, 8 область 12 заштрихована штриховыми линиями под углом 135 к горизонтальной оси чертежа); (фиг. 2, 3, 5, 7, 8);
поз. 13 - область пространства с неизмененным по отношению к величине космологического векторного потенциала 9(Aг) значением суммарного векторного потенциала 8(Aсум) (фиг. 2, 3, 5, 7, 8);
поз. 14 - направление сканирования пространства полем векторного потенциала 11(A) тока искусственного источника векторного потенциала по ширине (фиг. 2);
поз. 15 - направление сканирования пространства полем векторного потенциала 11(A) тока искусственного источника векторного потенциала по долготе (фиг. 2);
поз. 16 - схематичное изображение сферы пространства (фиг. 2, 3);
поз. 17 - датчик обнаружения и регистрации базового физического объекта (поля суммарного векторного потенциала 8(Aсум) тока); (фиг. 2, 3, 5);
поз. 18 - система создания в локальной области пространства поля векторного потенциала 11(A) тока искусственных источников векторного потенциала); (фиг. 2, 3, 5);
на фиг. 6, 7 показан вариант системы 18, выполненный в виде соленоида 31 с токовой оболочкой 32; на фиг. 8 - вариант системы 18, выполненный в виде тороида 33 с токовой обмоткой 34;
поз. 19 - средства для регистрации физических эффектов, обусловленных созданием и существованием в пространстве локальной области 12 поля суммарного потенциала 8(Aсум) с пониженным по отношению к величине космологического векторного потенциала 9( Aг) значением суммарного векторного потенциала 8(Aсум) и его изменениями (фиг. 2, 3, 5);
поз. 20 - материальное тело, механически связанное с штангой 21, с датчиком 22 величины и направлений сил 23(F), возникающих при воздействии полей векторного потенциала тока на физический вакуум и действующих на указанное материальное тело 20 в поле суммарного векторного потенциала 8(Aсум) (фиг. 6, 7);
поз. 21 - штанга, механически связывающая материальное тело 20 с датчиком 22 величин и направлений сил 23(F) (фиг. 6, 7);
поз. 22 - датчик величин и направлений сил 23(F), возникающих при воздействии полей векторного потенциала тока на физический вакуум и действующих на материальное тело 20 в поле суммарного векторного потенциала 8(Aсум) (фиг. 6, 7);
поз. 23 - вектор, характеризующий направление сил F, возникающих при воздействии полей векторного потенциала тока на физический вакуум и действующих на материальное тело 20 в поле суммарного векторного потенциала 8(Aсум) (фиг. 4, 7);
поз. 24 - материальное поле, содержащее радиоактивное вещество (фиг. 8);
поз. 25 - датчик активности и изменения активности распада радиоактивного вещества материального тела 24 вследствие воздействия на него поля суммарного векторного потенциала 8(Aсум); (фиг. 8);
поз. 26 - направление электрического тока (I), пропускаемого по токоведущим элементам (в частности, по токовой обмотке 32 соленоида 31 (фиг. 7) и/или по токовой обмотке 34 тороида 33); (фиг. 8);
поз. 27 - угол (αo) между координатной осью космического аппарата 1 и осью опорной системы координат, соответствующей направлению поля суммарного векторного потенциала 8(Aсум) (например, между координатной осью абсцисс 2(Xка) космического аппарата и осью абсцисс 5(Xоп) опорной системы координат, совпадающей с направлением суммарного вектора-потенциала 8(Aсум); (фиг. 1, 3, 5, 7, 8);
поз. 28 - угол (βo) между направлением поля суммарного векторного потенциала 8(Aсум) и поля космологического векторного потенциала 9(Aг) (фиг. 4, 5);
поз. 29 - логарифмическая масштабная шкала к диаграмме фиг. 4 для оценки числовых значений векторных потенциалов 8A(сум), 9(Aг), 10(Aп) и 11(A) (фиг. 4);
поз. 30 - обойма соленоида 31 (фиг. 6, 7);
поз. 31 - соленоид с токовой обмоткой 32 (вариант системы 18 создания в локальной области пространства поля векторного потенциала 11A тока искусственных источников векторного потенциала по п. 11 формулы изобретения); (фиг. 6, 7);
поз. 32 - токовая обмотка соленоида 30; (фиг. 7);
поз. 33 - тороид с токовой обмоткой 34 (вариант системы 18 создания в локальной области пространства поля векторного потенциала 11(A) тока искусственных источников векторного потенциала по п. 12 формулы изобретения); (фиг. 8);
поз. 34 - токовая обмотка тороида 33 (фиг. 8);
поз. 35 - сферическая замкнутая поверхность, на которой размещена система многочисленных датчиков 17 обнаружения и регистрации базового физического объекта (направления в пространстве поля суммарного потенциала 8(Aсум); (фиг. 5);
поз. 36 - подшипник обоймы 30 соленоида 31 (фиг. 6);
поз. 37 - двигатель, обеспечивающий вращение соленоида 31 и закрепленных в его внутренней полости материального тела 20, штанги 21 и датчика 22 величин и направлений тел 23F вокруг оси 39 (фиг. 6);
поз. 38 - вал двигателя 37 (фиг. 6);
поз. 39 - ось вращения соленоида 31 и закрепленных в его внутренней полости материального тела 20, штанги 21 и датчика 22 величин и направлений сил 23(F) (фиг. 6);
поз. 40 - рамка (фиг. 6, 7);
поз. 41 - подшипник рамки 40 (фиг. 6, 7);
поз. 42 - двигатель, обеспечивающий вращение рамки 40 и закрепленной в ней с возможностью вращения обоймы 30 соленоида 31 вокруг оси 44 (фиг. 6, 7);
поз. 43 - вал двигателя 42 (фиг. 6, 7);
поз. 44 - ось вращения рамки 40 (фиг. 6, 7).
В соответствии с чертежом устройство для навигации - навигационный прибор - содержит датчик 17 обнаружения и регистрации базового физического объекта (поля суммарного векторного потенциала 8(Aсум) тока, равного сумме поля космологического векторного потенциала 9(Aг), полей векторного потенциала 10(Aп) тока природных источников векторного потенциала и полей векторного потенциала 11(A) токов искусственных источников векторного потенциала), систему сканирования пространства и систему определения положения датчика по отношению к координатным осям 2(Xка), 2(Yка), 4(Zка) космического аппарата 1.
Датчик 17 обнаружения и регистрации базового физического объекта 8(Aсум) механически связан с системой сканирования пространства и выполнен в виде системы 18 создания в локальной области пространства поля векторного потенциала 11A тока искусственных источников векторного потенциала и размещенных в указанной области пространства средств 19 для регистрации физических эффектов, обусловленных созданием и существованием в пространстве локальной области 12 поля суммарного потенциала 8(Aсум) с пониженным по отношению к величине космологического векторного потенциала 9(Aг) значением суммарного векторного потенциала 8(Aсум) и его изменениями.
На чертеже система 18 создания в локальной области пространства поля векторного потенциала 11(A) тока искусственных источников векторного потенциала показана в двух вариантах: в первом варианте (см. фиг. 5, 6) - в виде закрепленного в силовой обойме 30 соленоида 31, обмотка 32 которого подсоединена к источнику электрического тока (в соответствии с п. 11 формулы изобретения), и во втором варианте (см. фиг. 8) - в виде тороида 33, обмотка 34 которого также подсоединена к своему источнику электрического тока в соответствии с п. 12 формулы изобретения (источники электрического тока на чертеже не показаны).
Кроме того, система 18 в общем виде схематично изображена на фиг. 2,3,5.
Входящие в датчик 17 обнаружения и регистрации базового физического объекта 8(Aсум) средства 19 для регистрации физических эффектов, обусловленных созданием и существованием в пространстве локальной области 12 поля суммарного потенциала 8(Aсум) с пониженным по отношению к величине космологического векторного потенциала 9(Aг) значением суммарного векторного потенциала 8(Aсум) и его изменениями, на чертеже показаны также в двух вариантах:
в одном варианте (см. фиг. 6,7) - в виде размещенного в указанной локальной области 12 пространства материального тела 20, механически связанного штангой 21 с датчиком 22 величин и направлений сил 23F, возникающих при воздействии полей векторного потенциала тока на физический вакуум и действующих на указанное материальное тело 20 в поле упомянутого суммарного векторного потенциала 8(Aсум) (в этом случае материальное тело 20, механически связанное с датчиком 22 величин и направлений сил 23(F), наиболее целесообразно выполнять из вещества с плотностью не менее 8000 кг/м3),
и во втором варианте (см. фиг. 8) - в виде размещенного в локальной области пространства материального тела 24, содержащего радиоактивное вещество, и датчика 25 активности и изменения активности распада радиоактивного вещества вследствие воздействия на него поля упомянутого суммарного векторного потенциала 8(Aсум).
Кроме того, средства 19 в общем виде схематично изображены на фиг. 2,3,5.
Отметим также, что все описанные конкретные варианты выполнения средств 19 взаимозаменяемы для любого из чертежей.
В обоих вариантах выполнения конструкции (фиг. 6,7 и фиг. 8) средства 19 для регистрации физических эффектов могут быть размещены как во внутренней полости, так и снаружи систем 18 создания в локальной области пространства поля векторного потенциала 11(A) тока искусственных источников векторного потенциала (в частности, соленоида 31 и/или тороида 33).
Возможность расположения средств 19 снаружи систем 18 связано с тем, что проявление регистрируемых средствами 19 физических эффектов, например, сил 23(F) обусловлено наличием в области 12 не индукции магнитного поля, а наличием векторных потенциалов 11(A), которое, как отмечается, например, в [22-24] , имеет место даже при отсутствии в этой области пространства индукции магнитного поля (т.е., например, снаружи тороида 33).
На фиг. 6 - 8 средства 19 для регистрации физических эффектов, обусловленных созданием и существованием в пространстве локальной области 12 поля суммарного потенциала 8(Aсум), показаны установленными в системах 18 создания в локальной области пространства поля векторного потенциала 11(A) тока искусственных источников векторного потенциала механически жестко относительно указанных систем 18 (относительно соленоида 31 и тороида 33) (в соответствии с п. 20 формулы изобретения). На фиг. 5 и 8 показаны варианты конструкции навигационного прибора с жестким размещением упомянутых средств 19 в диапазоне телесных углов от 0 до 360o по отношению к координатной оси 2(Xка) космического аппарата 1 (в соответствии с п. 21 формулы изобретения). (На фиг. 5 средства 19 размещены, например, равномерно на замкнутой поверхности, выполненной в виде сферы 35, на фиг. 8 эти средства расположены в соответствии с конфигурацией тороида 33).
Для уменьшения общего количества средств 19 допустима их установка в системах 18 с возможностью перемещения средств 19 относительно указанных систем 18 и/или относительно друг другу (в соответствии с п. 19 формулы изобретения).
На чертеже показаны три варианта конструкции систем сканирования полем векторного потенциала 11(A) тока искусственного источника векторного потенциала пространства в диапазоне телесных углов от 0 до 360o по отношению к одной из координатных осей 2(Xка), 2(Yка) или 4(Zка)) космического аппарата 1, обеспечивающие необходимое для определения направления базового объекта (направление поля суммарного потенциала 8Aсум, воздействие полем векторного потенциала 11(A) тока искусственного источника векторного потенциала на поле космологического векторного потенциала 9(Aг):
- по первому варианту (фиг. 6,7; п. 22 формулы изобретения) система сканирования пространства выполнена в виде устройства вращения датчика 17 обнаружения и регистрации базового физического объекта в двух взаимно перпендикулярных плоскостях, что обеспечено путем установки обоймы 30 соленоида 31 в подшипнике 36, ее жесткой механической связи с ротором двигателя 37, вращающего своим валом 38 соленоид 31 и закрепленные в его внутренней полости материальное тело 20, штангу 21 и датчик 22 величин и направлений сил 23(F) вокруг оси 39, установки обоймы 30 соленоида 31 в рамке 40, закрепленной в подшипнике 41 и жестко механически связанной валом 43 с ротором двигателя 42, закрепленного на корпусе космического аппарата 1 и вращающего рамку 40 (вместе с обоймой 30 соленоида 31) вокруг оси 44 (на фиг. 7 показан частный, предпочтительный случай совпадения оси 44 с координатной осью 2(Xка) космического аппарата 1) и системы определения суммарного угла поворота указанного датчика 17 по отношению к одной из координатных осей (в частности, например, относительно оси 2(Xка) космического аппарата 1 (система определения суммарного угла поворота датчика 18 по отношению к координатным осям космического аппарата 1 на чертеже не показана вследствие ее общеизвестности, см., например, [5, стр. 181-194, рис. 4,9; стр. 240-241]);
- по второму варианту (фиг. 5; пп. 23,25 формулы изобретения) система сканирования пространства выполнена в виде системы многочисленных датчиков 17 обнаружения и регистрации базового физического объекта 8(Aсум), размещенных на замкнутой пространственной сферической поверхности 35 таким образом, что векторы 11(A) систем создания в локальной области пространства поля векторного потенциала 11(A) тока искусственных источников векторного потенциала указанных датчиков 17 ориентированы в диапазоне телесных углов от 0 до 360o по отношению к одной из координатных осей (например, к оси 2(Xка)) космического аппарата 1;
- по третьему варианту (фиг. 8; пп. 24, 26 формулы изобретения) система сканирования пространства выполнена в виде токовой обмотки 34, размещенной на замкнутой пространственной поверхности тороида 33 таким образом, что векторы 26(I) тока отдельных элементов указанной обмотки ориентированы в диапазоне телесных углов от 0 до 360o по отношению к одной из координатных осей (например, к оси 2(Xка)) космического аппарата 1, что обеспечивается намоткой обмотки 34 по всей поверхности тороида 33.
В соответствии с предлагаемым "Способом..." навигация космического аппарата осуществляется следующим образом.
Как известно, задачей навигации является определение совокупности навигационных координат космического аппарата 1 относительно какой-либо опорной системы координат (см., например, [5, стр. 12-31], [6, стр. 501]). Важная часть этой задачи заключается в возможно более точном определении направлений в пространствен осей 5(Xоп), 6(Yоп, 7(Zоп) опорной системы координат, с помощью которых определяется интересующая нас траектория движения космического аппарата 1, а также в определении положения координатных осей 2(Xка), 3(Yка), 4(Zка) самого аппарата 1 относительно осей 5(Xоп), 6(Yоп, 7(Zоп) опорной системы координат (т.е., в соответствии с чертежом, в определении угла 27 (αo) между координатной осью 2(Xка) космического аппарата 1 и осью 5(Xоп) опорной системы координат).
По предложенному "Способу..." в качестве направления одной из осей опорной системы координат (в соответствии с чертежом, см., например, фиг. 1 - оси 5(Xоп)) выбирают направление поля суммарного векторного потенциала 8(Aсум) тока, равного сумме поля космологического векторного потенциала 9(Aг), полей векторного потенциала 19(Aп) тока природных источников векторного потенциала и полей векторного потенциала 11(A) тока искусственных источников векторного потенциала.
По современным физическим представлениям (см., например, [12, стр. 37, 13,14,16, 17, стр. 51]) направление поля суммарного векторного потенциала 8(Aсум) тока с достаточно большой точностью практически постоянно в области Солнечной системы и имеет на Земле координаты: прямое восхождение: 270 ± 7o и склонение: +30o, что и обеспечивает возможность использования этого поля в качестве базового физического объекта при навигации космических аппаратов.
Указанные численные значения координат даны при использовании второй экваториальной системы небесных координат, см., например, [25, стр. 26-30, рис. 5].
Чтобы определить упомянутое направление поля суммарного векторного потенциала 8(Aсум) тока создают в локальной области пространства при помощи по крайней мере одной системы 18 поле векторного потенциала 11(A) тока искусственных источников векторного потенциала и воздействуют этим полем 11(A) на поле космологического векторного потенциала 9(Aг).
В соответствии с терминологическим определением физического понятия "векторный потенциал тока" (см., например, [26, стр. 219]) поле векторного потенциала 11(A) тока искусственного источника векторного потенциала в локальной области пространства может быть создано путем размещения в указанной области пространства постоянных магнитов (входящих в системы 18) либо путем пропускания электрического тока 26(I) по токоведущим элементам, расположенным в указанной области пространства (в частности, по токовой обмотке 32 соленоида 31 (фиг. 7), и/или по токовой обмотке 34 тороида 33 (фиг. 8)).
Упомянутое воздействие полем векторного потенциала 11(A) тока искусственного источника векторного потенциала на поле космологического векторного потенциала 9(Aг) осуществляют либо путем непрерывного сканирования полем векторного потенциала 11(A) тока искусственного источника векторного потенциала пространства в диапазоне телесных углов от 0 до 360o по отношению к одной из координатных осей (например, оси 2(Xка))космического аппарата 1 (т. е. путем непрерывного изменения направления вектора 11(A) по широте 14 и по долготе 15 сферы 16 пространства - см. фиг. 2), либо путем дискретного сканирования за счет создания в пространстве стационарной системы полей векторного потенциала 11(A) тока (от многочисленных систем 18), направленных в диапазоне телесных углов от 0 до 360o по отношению к одной из координатных осей (например, оси 2(Xка космического аппарата 1 (см. фиг. 5).
Указанным воздействием полем векторного потенциала 11(A) тока на поле космологического векторного потенциала 9(Aг) создают в локальной области 12 пространства поле суммарного векторного потенциала 8(Aсум), равного сумме поля космологического векторного потенциала 9(Aг), полей векторного потенциала 10(Aп) тока природных источников векторного потенциала и полей векторного потенциала 11(A) тока искусственных источников векторного потенциала с пониженным по отношению к величине космологического векторного потенциала 9(Aг) значением суммарного векторного потенциала 8(Aсум).
Поскольку в соответствии с теорией и экспериментами [9-21, 27-29] величина космологического вектора потенциала 9(Aг) при его взаимодействии с любым другим вектор-потенциалом тока может быть только уменьшена до некоторого суммарного вектора потенциала 8(Aсум) и не может быть увеличена, (например, при совпадении направлений космологического вектор-потенциала 9(Аг) и другого вектор-потенциала, взаимодействующего с 9(Аг)), то область 12 пространства с пониженным по отношению с величине космологического векторного потенциала 9(Аг) значением суммарного векторного потенциала 8(Асум) может быть создана только в случае ориентирования векторов-потенциалов 10(Ап) и 11(А) в пространстве под углом от 90 до 270o к вектору космологического векторного потенциала 9(Аг).
При иной взаимной ориентации векторов 9(Аг), 10(Ап), 11(А) в пространстве образуется область 13 с неизменным по отношению к величине космологического векторного потенциала 9(Аг) (равным величине 9(Аг)) постоянным значением суммарного векторного потенциала 8(Асум).
Как видно из векторных диаграмм фиг. 1, 3, 5, 7, 8, максимальное уменьшение суммарного векторного потенциала 8(Асум) имеет место при противоположном направлении вектора 9(Аг) и взаимодействующих с ним вектор-потенциалов 10(Ап) и 11(А).
(Заметим при этом, что графически иллюстрируемое на фиг. 1, 3-5, 7-8 сложение векторов 9(Аг), 10(Ап), 11(А) показано условно и служит только для наглядности; аналитически их сумма выражается сложным математическим рядом, см., например, [12, 16]).
После создания в пространстве области 12 с пониженным по отношению к величине космологического векторного потенциала 9(Аг) значением суммарного векторного потенциала 8(Асум) получают и регистрируют физические эффекты, обусловленные созданием и существованием этой области 12 поля упомянутого суммарного потенциала 8(Асум) и его изменениями.
Одним из таких физических эффектов является возникновение в области 12 механических сил 23(F), действующих на материальные тела (например, на тело 20 - см. фиг.7), размещенные в указанной локальной области 12 пространства (см., например, [13-18]).
Согласно теории и экспериментам [9-18] искомое направление поля суммарного векторного потенциала 8(Асум)(принятое по предлагаемому "Способу навигации. . ." в качестве базового физического объекта и совпадающее с направлением одной из осей опорной системы координат (например, оси 5(Хоп)) соответствует направлению в пространстве максимальной из сил 23(F), действующих на упомянутое материальное тело 20 и зарегистрированных (например, датчиками 22, см. фиг. 6, 7 чертежа) при сканировании полем векторного потенциала 11(А) тока искусственного источника векторного потенциала пространства в диапазоне телесных углов от 0 до 360o по отношению к одной из координационных осей (например, оси 2(Хка)) космического аппарата 1.
Отметим, что изображенные на фиг. 6 и 7 материальное тело 20, штанга 21 и датчик 22 составляют в совокупности (по терминологии настоящей заявки) средства 19 для регистрации физических эффектов, обусловленных созданием и существованием в пространстве локальной области поля суммарного потенциала 8(Асум.), и в общем виде схематично изображены также на фиг. 2, 3, 5.
Другим из возможных для регистрации физических эффектов является изменение в области 12 вероятности осуществления в расположенном в этой области радиоактивном веществе физических процессов, обусловленных слабыми взаимодействиями элементарных частиц, в частности, изменение активности распада радиоактивного вещества вследствие воздействия на него поля упомянутого суммарного векторного потенциала 8(Асум) (см., например, [19-21]).
В соответствии с этим для определения искомого направления поля суммарного векторного потенциала 8(Асум) в пространстве размещают материальные тела 24, содержащие радиоактивные вещества (в частности вещества, обладающие способностью к бета-распаду) и регистрируют (например, датчиками 25, см.фиг. 8) активность и изменения активности распада радиоактивного вещества вследствие воздействия на него поля упомянутого суммарного векторного потенциала 8(Асум).
Отметим, что изображенные на фиг.8 материальные тела 24 и датчики 25 также составляют в совокупности (по терминологии настоящей заявки) средства 19 для регистрации физических эффектов, обусловленных созданием и существованием в пространстве локальной области поля суммарного потенциала 8(Асум) и в общем виде схематично изображены также на фиг.2, 3, 5.
В экспериментах [19 - 21] получено, что минимальная активность распада радиоактивного вещества имеет место в зоне области 12 с минимальным значением поля суммарного векторного потенциала 8(Асум), что соответствует случаю максимального уменьшения векторного потенциала 8(Асум) относительно космологического векторного потенциала 9(Аг), т.е. при противоположно направленных векторах космологического вектор-потенциала 9(Аг) и вектор-потенциала 10(Ап) тока природных источников векторного потенциала и вектор-потенциала 11(А) тока искусственных источников векторного потенциала.
Поэтому за направление поля суммарного векторного потенциала 8(Асум) принимают направление, противоположное направлению сканирующего пространства поля векторного потенциала 11(А) тока искусственного источника векторного потенциала, при котором зарегистрирована минимальная активность распада радиоактивного вещества. Изменять в области 12 направление вектор-потенциала 10(Ап) тока природных источников векторного потенциала (Земли, Солнца, других звезд), по-видимому, невозможно и это направление 10(Ап) всегда будет входить в результат в виде некоторой постоянной векторной величины, взаимодействующей с векторами 9(Аг и 11(А).
Определенное по указанным эффектам направление поля суммарного векторного потенциала 8(Асум) принимают в качестве направления в пространстве на базовый физический объект, по отношению к которому определяют направление координатных осей 2(Xка), 3(Yка), 4(Zка) космического аппарата 1 и используют указанное направление поля суммарного векторного потенциала 8(Асум) в качестве одной из осей опорной системы координат (оси 5(Xоп) или 6(Yоп, или 7(Zоп) при регистрации положения космического аппарата 1.
Отметим, что на фиг. 1-3, 5, 7, 8 для упрощения пояснений изображен вариант с параллельным и однонаправленным расположением в пространстве полей космологического векторного потенциала 9(Аг) и векторного потенциала 10(Ап) тока природных источников векторного потенциала, при котором поле векторного потенциала 10(Ап) не меняет ни величину, ни направление поля суммарного векторного потенциала 8(Асум) тока.
Влияние поля векторного потенциала 10(Ап) тока природных источников векторного потенциала на направление поля суммарного векторного потенциала 8(Асум) тока иллюстрирует фиг. 4. Видно, что максимальное отклонение вектора 8(Асум) от направления космологического вектор-потенциала 9(Аг) будет иметь место в случае взаимно перпендикулярно направленных вектор-потенциалов 9(Аг) и 10(Ап).
Поскольку абсолютные значения рассматриваемых векторных потенциалов тока находятся на уровне:
- космологический вектор-потенциала 9(Аг):  = 1,95 • 10+11 Гс•см,
= 1,95 • 10+11 Гс•см,
вектор-потенциал 10(Ап) тока природных источников векторного потенциала:  = (1-4) • 10+8 Гс•см,
= (1-4) • 10+8 Гс•см,
вектор-потенциал 11(А) тока современных искусственных источников векторного потенциала:  = (10+5 - 10+7) Гс•см (1 Гс• см (гаусс•см) = 10-5 Тс•м (тесла•м)) (см. , например, [19 - 21]), тангенс максимального угла 28 (βo) между направлением поля суммарного векторного потенциала 8(Асум) и поля космологического векторного потенциала 9(Аг) составляет порядка 10-3, т.е. максимальные отклонения при определении направления в пространстве вектора суммарного векторного потенциала 8(Асум) (ошибки в определении направления в пространстве на базовый физический объект по заявляемому "Способу...") не превышают 0,001o.
= (10+5 - 10+7) Гс•см (1 Гс• см (гаусс•см) = 10-5 Тс•м (тесла•м)) (см. , например, [19 - 21]), тангенс максимального угла 28 (βo) между направлением поля суммарного векторного потенциала 8(Асум) и поля космологического векторного потенциала 9(Аг) составляет порядка 10-3, т.е. максимальные отклонения при определении направления в пространстве вектора суммарного векторного потенциала 8(Асум) (ошибки в определении направления в пространстве на базовый физический объект по заявляемому "Способу...") не превышают 0,001o.
Устройство для реализации "Способа..." ("Навигационный прибор") работает следующим образом:
За счет пропускания электрического тока 26(I) по токовой обмотке 32 соленоида 31 (фиг. 6,7) или по токовой обмотке 34 тороида 33) (фиг.8), или за счет использования в средствах 18 датчиков 17 постоянных магнитов (а также электромагнитов) (фиг. 5) создают в локальной области пространства (или в ряде локальных областей пространства - фиг.5) поле (поля) векторного потенциала 11(А) тока искусственного источника векторного потенциала. (Направление вектора 11(А) в соответствии с его математическим определением соответствует направлению в данной области пространства тока 26(I) - см., например, [26]).
Вращая соленоид 31, закрепленный в обойме 30, с помощью двигателей 37 и 42, механически связанных с обоймой 30, валами 38 и 43, установленными в подшипниках 36 и 41, в двух взаимно перпендикулярных плоскостях (вокруг осей 39 и 44), осуществляют сканирование созданием этим соленоидом 31 полем векторного потенциала 11(А) тока искусственного источника векторного потенциала пространства в диапазоне телесных углов от 0 до 360o по отношению к одной из координатных осей космического аппарата (в частности, по отношению к оси 2(Хка), см. фиг.6, 7).
Отметим, что изображенная на фиг. 6, 7 совокупность конструктивных элементов: соленоид 31 с токовой обмоткой 32, закрепленный в обойме 30 с возможностью вращения валом 38 двигателя 39 относительно рамки 40, которая в свою очередь валом 43 двигателя 42, закрепленным на корпусе космического аппарата 1, приводится во вращение относительно этого корпуса, а также материальное тело 20, механически связанное штангой 21 с датчиком 22 величин и направлений сил 23(F), образует, согласно терминологии настоящей заявки, датчик 17 обнаружения и регистрации базового физического объекта - поля суммарного векторного потенциала 8(Асум)).
При достижении ориентации соленоида 31 датчика 17, обеспечивающей образование в пространстве области 12 с пониженным по отношению к величине космологического векторного потенциала 9(Аг) значением суммарного векторного потенциала 8(Асум) на датчике 22 появляется сигнал, характеризующий величину и направление силы 23(F), возникающей при воздействии полей векторного потенциала тока на физический вакуум и действующих на материальное тело 20 в поле суммарного векторного потенциала 8(Асум).
Сила 23(F) пропорциональна абсолютной величине уменьшения суммарного векторного потенциала 8(Асум) относительно космологического векторного потенциала 9(Аг), а также величине градиента суммарного векторного потенциала 8(Асум) в той зоне области 12 пространства, в которой размещено материальное тело 20, и действует на тело 20 в направлении 8(Асум), выталкивая тело 20 из области 12 с пониженным по отношению к величине космологического векторного потенциала 9(Аг) значением суммарного векторного потенциала 8(Асум) (см., например, [12]).
Выполнение материального тела 20 (или части его массы) из вещества с достаточно большой плотностью (не менее 8000 кг/м3, например, из тантала) дает возможность увеличить в единице объема материального тела 20 количество частиц, на которые действует сила 23(F), и, вследствие этого, уменьшить габаритные размеры устройства (или, при сопоставимых размерах, повысить его силовые характеристики и, следовательно, увеличить чувствительность навигационного прибора и точность осуществляемых измерений).
По достижении и замере датчиком 22 максимальной из всех полученных при сканировании пространства значений величины силы 23(F) обычной типичной системой определения положения датчика 17 по отношению к координатным осям космического аппарата 1 (см., например, [5]) регистрируется и фиксируется угол 27 (α°) между координатной осью комического аппарата 1 и соответствующей этому положению датчика 17 осью опорной системы координат, в результате чего определяется (по отношению к координатным осям 2(Xка), 3(Yка), 4(Zка) космического аппарата 1) направление поля суммарного векторного потенциала 8(Aсум), принимаемое в соответствии с заявляемым "Способом..." в качестве одной из осей опорной системы координат (на фиг. 7 показано определение угла 27 (α°) между осью абсцисс 2(Zка космического аппарата и осью абсцисс 5(Xоп опорной системы координат).
Известно (см. , например, [5, стр. 351]), что для вращающихся механических систем сканирования пространства легко достигаются углы поворота ± 270o относительно нулевого положения, а следовательно, требуемое по настоящему "Способу..." сканирование в диапазоне телесных углов от 0 до 360oС (т. е. ± 180o) по отношению к одной из координатных осей космического аппарата обеспечивается достаточно просто. Еще большее упрощение конструкции может быть достигнуто за счет того, что, как указано выше, согласно физике формирования в пространстве поля векторного потенциала 11(A) направление сканирующего пространство вектора 11(A) соответствует направлению в данной области пространства тока 26(I), вследствие чего простое изменение направления пропускаемого по обмотке 32 соленоида 31 электрического тока 26(I) на противоположное (обеспечивающее изменение на противоположное направления вектор-потенциала 11(A)) дает возможность заменить сканирование (поворот соленоида 31) в диапазоне углов от 0 до 360o на два попеременных сканирования пространства в диапазоне телесных углов от 0o до 180o (т.е. ± 90o) по отношению к одной и той же координатной оси космического аппарата (в соответствии с п.9 формулы изобретения).
В варианте выполнения в заявляемом навигационном приборе системы 18 создания в локальной области пространства поля векторного потенциала 11(A) тока искусственных источников векторного потенциала в виде тороида 33, обмотка 34 которого подсоединена к источнику электрического тока (в соответствии с п.12 формулы изобретения) (фиг. 8), формируется стационарная, неподвижная система непрерывного сканирования пространства полем векторного потенциала 11(A), поскольку векторы 26(I) тока отдельных элементов торообразной токовой обмотки 34 в соответствии с геометрической формой тороида 33 ориентированы в диапазоне телесных углов от 0 до 360o по отношению к одной из координатных осей (в частности, к оси 2(Xка)) космического аппарата 1 (п. 24 формулы изобретения) и, следовательно, точно также ориентированы векторы 11(A).
В результате в пространстве образуется стационарная область 12 с пониженным по отношению к величине космологического векторного потенциала 9(Aг) значением суммарного векторного потенциала 8(Aсум) и на датчиках 25 появляются сигналы, характеризующие активность и изменения активности распада радиоактивного вещества материального тела 24 вследствие воздействия на него поля упомянутого суммарного векторного потенциала 8(Aсум).
Искомое направление поля суммарного векторного потенциала 8(Aсум), принимаемое в соответствии с заявляемым "Способом..." в качестве одной из осей опорной системы координат (оси 5(Xоп) - фиг. 8), определяют как направление, противоположное направлению поля векторного потенциала 11(A) тока искусственного источника векторного потенциала в той области пространства, где расположены материальное тело 24, содержащее радиоактивное вещество, и соответствующий ему датчик 25 активности, которым зарегистрирована минимальная активность распада этого радиоактивного вещества (как видно из фиг. 8 в торообразной системе существует два таких датчика, что естественно повышает точность измерений).
Поскольку месторасположение отдельных материальных тел 24 и датчиков 25 относительно тороида 33 известно, а также известно расположение самого тороида относительно космического аппарата 1, обычными методами легко определяется и ориентация космического аппарата 1 относительно опорной системы координат (т.е. угол 27 (α°) между координатной осью космического аппарата 1 и осью опорной системы координат, соответствующей направлению поля суммарного векторного потенциала 8(Aсум) (например, как показано на фиг. 8, между координатной осью абсцисс 5(Xоп) опорной системы координат, совпадающей с направлением суммарного вектор-потенциала 8(Aсум).
Выполнение материальных тел 24 и датчиков 25 с возможностью их перемещения относительно тороида 33 и/или относительно друг друга (в соответствии с п.19 формулы изобретения) несколько усложняет механику устройства и его вычислительные средства, но не приводит ни к каким принципиальным трудностям в обеспечении работы устройства. В то же время возможность перемещения этих элементов устройства (образующих в совокупности средства 19 для регистрации физических эффектов, обусловленных созданием и сосуществованием в пространстве локальной области поля суммарного векторного потенциала 8(Aсум) позволяет обеспечить более тонкое (непрерывное, а не дискретное) исследование сканируемого пространства и/или уменьшить количество необходимых средств 19.
Отметим, что в изображенной на фиг. 8 тороидальной конструкции навигационного прибора средства 19 для регистрации физических эффектов могут быть выполнены и в виде показанного ранее на фиг. 6, 7 материального тела 20, механически связанного штангой 21 с датчиком 22 величин и направлений сил 23(F).
Естественно, что определение искомого направления поля суммарного векторного потенциала 8(Aсум) в этом случае осуществляют в соответствии с п.4 формулы изобретения, т.е. за направление поля суммарного векторного потенциала 8(Aсум) принимают направление, соответствующее направлению в пространстве максимальной из зарегистрированных датчиками 22 сил 23(F), действующих на материальное тело 20.
Аналогично средства 19, показанные на фиг. 8 (материальное тело 24 с радиоактивным веществом и датчик 25 активности), могут быть использованы в варианте конструкции, изображенном на фиг. 6,7, с определением искомого направления поля суммарного векторного потенциала 8(Aсум) согласно вышеприведенному описанию работы варианта устройства по фиг. 8 (т.е. в соответствии с п.5 формулы изобретения).
Точно также оба варианта средств 19 (и указанные выше соответствующие этим конструктивным вариантам последовательности действий при определении искомого направления поля суммарного векторного потенциала 8(Aсум)) могут быть использованы и в составе датчиков 17 в модификации устройства сферической конфигурации - фиг. 5, т.е. работа этого устройства принципиально не отличается от работы устройств, изображенных на фиг. 6-8.
При работе варианта устройства по фиг. 5 в случае неподвижных датчиков 17 желательно использование вычислительной системы сравнения величин сигналов, поступающих со средств 19 (т.е. с датчиков 22 или 25), т.к. это позволит более точно определить направление поля суммарного векторного потенциала 8(Aсум) (направление оси 5(Xоп)) при расположении этого направления между дискретно размещенными по сфере 35 датчиками 17.
Отметим, что использование такой вычислительной системы полезно и для обработки результатов измерений при работе варианта устройства, показанного на фиг. 8 (и для любой иной аналогичной конструкции, использующей дискретное, а не непрерывное сканирование пространства).
Варианты конструкции заявляемого устройства, изображенные на фиг. 6-8, соответствуют случаю, когда средства 19 для регистрации физических эффектов размещены во внутренней полости системы 18 создания в локальной области пространства поля векторного потенциала 11(A) тока искусственных источников векторного потенциала, т.е. в соответствии с п.17 формулы изобретения.
Принципы работы устройства и последовательность действий при его работе не изменятся и в варианте, когда средства 19 для регистрации физических эффектов будут размещены не во внутренней полости, а снаружи системы 18 создания в локальной области пространства поля векторного потенциала 11(A) тока искусственных источников векторного потенциала (в соответствии с п.18 формулы изобретения), поскольку, как указано выше, возникновение и проявление используемых в изобретении физических эффектов обусловлено наличием в области 12 не индукции магнитного поля, а наличием векторного потенциала 11(A), которое (см. , например, [22-24]) имеет место даже при отсутствии в этой области пространства индукции магнитного поля, что и обеспечивает получение результатов даже в системах 18 торообразной геометрии (фиг. 8). В то же время размещение средств 19 снаружи систем 18 позволяет значительно упростить конструкцию, особенно при выполнении средств 19 с возможностью их перемещения.
Проведенные предварительные исследования подтвердили реализуемость заложенных в изобретение физических принципов.
Источники информации
1. Г. Н. Громов Способ определения навигационных параметров, авторское свидетельство N 1 098 383, опубликовано 23.05.85 г., заявка N 3308387/40-23 от 16.07.81 г.
2. В. Риглей, Р.Вудбери, Дж.Говорка Инерциальная навигация, пер. с анг., под ред. Г.О. Фридлендера, М.: Издательство иностранной литературы, 1958 г.
3. М.И.Захарин Способ определения текущих координат движущихся объектов, авторское свидетельство N 182 347, опубликовано 25.05.66 г. , заявка 468999/40-23 от 17.06.58 г., МПК G 01 C 21/18.
4. М.И.Захарин Способ инерциальной навигации, авторское свидетельство N 182 423, опубликовано 07.10.69 г., заявка N 700048/40-23 от 03.10.58 г., МПК G 01 C 21/16; G 01 C 21/24.
5. Навигация, наведение и стабилизация в космосе, кол. авторов (Ч.С. Дрейпер, У. Ригли и др.) , под ред. Дж.Э.Миллера, пер. с англ., М.: Машиностроение, 1970 г.
6. Б. З. Михлин, В.П.Селезнев, А.В.Селезнев Геомагнитная навигация, М.: Машиностроение, 1976 г.
7. Н.Ф.Романтеев, Е.В.Хрунов Астрономическая навигация космических кораблей, М.: Машиностроение, 1976 г., (стр. 9 - прототип).
8. Н.М.Иванов, А.И.Мартынов Управление межпланетными космическими аппаратами, В сборнике "Вопросы управления космическими аппаратами", под ред. акад. Б.Р.Петрова, М.: Мир, 1975 г., стр. 187-216.
9. Ю.Н.Бабаев, Ю.А.Бауров О происхождении фундаментальных констант и некоторых квантовых чисел, Препринт ИЯИ АН СССР, П-0362, Москва, 1984 г.
10. Ю. Н.Бабаев, Ю.А.Бауров Нейтрино в дискретном пространстве и космология, Препринт ИЯИ СССР, П-0386, Москва, 1985 г.
11. Ю.А.Бауров О структуре пространства и происхождении волновых свойств частиц, "Астрофизические проявления предлагаемой структуры физического вакуума". В сборнике: "Физика плазмы и некоторые вопросы общей физики", Сборник научных трудов ЦНИИМАШ, 1990 г., стр. 71-83, 84-91.
12. Ю. А. Бауров "О структуре физического пространства и новом взаимодействии в природе", "Физическая мысль России", N 1, 1994 г., август, стр. 18-41.
13. Ю. А.Бауров, Е.Ю.Клименко, С.И.Новиков Экспериментальное наблюдение магнитной анизотропии пространства, "Доклады Академии Наук СССР", 1990 г., т. 315, N 5, стр. 1116-1120. УДК 539.12.01.
14. Yu.A.Baurov, E.Yu.Klimenko, S.I.Novikov "Experimental observation of space magnetic anisotropy", Phisics Letters A 162 (1992), p. 32-34, North-Holland.
15. Ю. А. Бауров, П.М.Рябов. "Экспериментальные исследования магнитной анизотропии пространства с помощью кварцевых пьезорезонансных весов", "Доклады Академии Наук", 1992 г., т. 326, N 1, стр. 73-77.
16. Yu. A. Baurov "Space magnetic anisotropy and new interaction in nature", Phisics Letters A 181 (1993), p. 283-288, North-Holland.
17. Ю. А.Бауров, Б.М.Серегин, А.В.Черников. "Экспериментальные исследования взаимодействия сильноточных систем с физическим вакуумом и реализация нового принципа движения", "Физическая мысль России", N 1, 1994 г., август, стр. 1 - 6.
18. Ю.А.Бауров, В.Г.Вержиковский. "Об асимметрии торможения вращающихся магнитных дисков в вакууме при правом и левом вращении", "Физическая мысль России", N 2, 1995 г., стр. 21-27.
19. Yu. A.Baurov, V. Schutov. "On the magnetic potential influence onto the velocity beta-decay", International conference: "Space, time, gravitation", Program and abstracts, May 23-28, 1994, St.-Petersburg, Russia.
20. Ю. А.Бауров, Шутов В.Л. "О влиянии векторного магнитного потенциала на скорость бета-распада", в сборнике: "Новые идеи в естествознании", (По материалам 3-ей Международной Конференции "Пространство, время, тяготение"). Часть 1 "Физика", серия "Проблемы исследования Вселенной", выпуск 18. Российская Академия наук, изд. Центральная научно-исследовательский институт машиностроения, Санкт-Петербург, 1995 г, стр. 16-23.
21. Ю. А.Бауров, В.Л.Шутов. "О влиянии векторного магнитного потенциала Земли и Солнца на скорость бета-распада", "Прикладная физика", N 1, 1995 г., стр. 40-45.
22. I. R.Walker. "Verification of the Aharonov-Bohm effect in superconductors by use of toroidal flux geometry", Physical Reviev B, V. 33, N 7, p. 5028-5029 (1986).
23. "Ааронова-Бома эффект", "Физическая энциклопедия", гл. ред. А.М.Прохоров, изд. "Советская энциклопедия", Москва, 1988 г., том 1, стр. 7-8.
24. Е. Ю.Клименко, С.И.Новиков. "Проведение проектных и расчетных работ для создания магнитных систем движителя и генератора, использующих энергию физического вакуума. Разработка и изготовление источника питания для сверхпроводящей системы движителя". Научно-технический отчет, "Российский научный центр "Курчатовский институт", Москва, 1994 г.
25. П.И.Бакулин, Э.В.Кононович, В.И.Мороз. "Курс общей астрономии", изд. 5-е, переработанное, изд. "Наука", Главная редакция физико-математической литературы, Москва, 1983 г.
26. И. Е.Тамм. "Основы теории электричества", изд. "Наука", Главная редакция физико-математической литературы, 8-е изд., Москва, 1966 г., стр. 219.
27. Ю. А. Бауров, Ю. Н. Бабаев, В.К.Аблеков. "Об одной модели слабого, сильного и электромагнитного взаимодействий", "Доклады Академии Наук", 1981 г., т. 259, N 5, стр. 1080.
28. Ю. А. Бауров, Ю.Н.Бабаев, В.К.Аблеков. "О неоднозначности скорости распространения электромагнитного поля", "Доклады Академии Наук", 1982 г., т. 262, N 1, стр. 68.
29. Ю. А. Бауров, Ю. Н.Бабаев, В.К.Аблеков. "Электромагнитный вакуум и сильные взаимодействия", "Доклады Академии Наук", 1982 г., т. 265, N 5, стр. 1108.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ГЕНЕРИРОВАНИЯ МЕХАНИЧЕСКОЙ ЭНЕРГИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2121602C1 |
| СПОСОБ ПОЛУЧЕНИЯ ЭНЕРГИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2147696C1 |
| СПОСОБ УПРАВЛЕНИЯ СЛАБЫМ ВЗАИМОДЕЙСТВИЕМ ЭЛЕМЕНТАРНЫХ ЧАСТИЦ ВЕЩЕСТВА | 1994 |
|
RU2089953C1 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1994 |
|
RU2106748C1 |
| ГЕНЕРАТОР МЕХАНИЧЕСКОЙ ЭНЕРГИИ (ВАРИАНТЫ) | 1996 |
|
RU2132109C1 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2099875C1 |
| СПОСОБ ПЕРЕМЕЩЕНИЯ ОБЪЕКТА В ПРОСТРАНСТВЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2023203C1 |
| СПОСОБ ГЕНЕРИРОВАНИЯ МЕХАНИЧЕСКОЙ ЭНЕРГИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1994 |
|
RU2091976C1 |
| СПОСОБ ПЕРЕМЕЩЕНИЯ ОБЪЕКТА В ПРОСТРАНСТВЕ | 1992 |
|
RU2082900C1 |
| СПОСОБ ПОЛУЧЕНИЯ ТЕПЛОВОЙ ЭНЕРГИИ И УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2251629C1 |
Изобретение относится к навигации преимущественно в дальнем космосе. Согласно изобретению, в качестве базового физического объекта для навигации выбирают поле суммарного векторного потенциала тока  равного сумме полей векторного потенциала: космологического
равного сумме полей векторного потенциала: космологического  природных
природных  и искусственных
и искусственных  источников. Воздействуют полем
источников. Воздействуют полем  на поле
на поле  создавая область пространства с пониженным значением векторного потенциала
создавая область пространства с пониженным значением векторного потенциала  В этой области получают и регистрируют физические эффекты, обусловленные пониженным значением
В этой области получают и регистрируют физические эффекты, обусловленные пониженным значением  и его изменениями. По данным эффектам определяют направление поля
и его изменениями. По данным эффектам определяют направление поля  и соответствующую ему ориентацию осей космического аппарата. Навигационный прибор содержит систему сканирования пространства, один или более датчиков поля
и соответствующую ему ориентацию осей космического аппарата. Навигационный прибор содержит систему сканирования пространства, один или более датчиков поля  с системами создания поля
с системами создания поля  и регистрации указанных физических эффектов. Изобретение позволяет расширить область применения и повысить точность способа и устройства определения вектора навигационного состояния космического аппарата. 2 c. и 24 з.п.ф-лы, 8 ил.
и регистрации указанных физических эффектов. Изобретение позволяет расширить область применения и повысить точность способа и устройства определения вектора навигационного состояния космического аппарата. 2 c. и 24 з.п.ф-лы, 8 ил.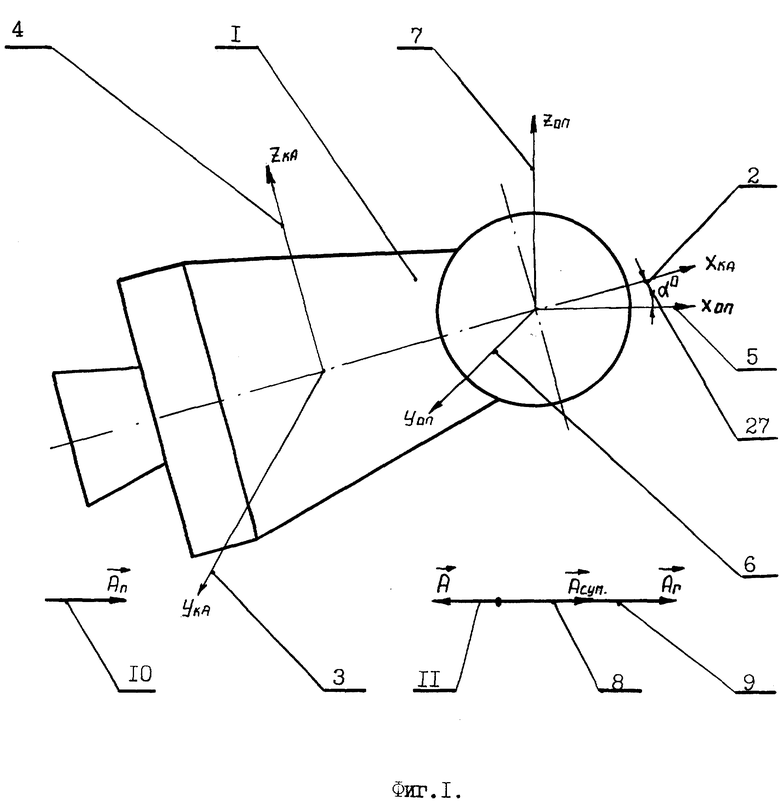
 равного сумме поля космологического векторного потенциала
равного сумме поля космологического векторного потенциала  полей векторного потенциала
полей векторного потенциала  тока природных источников векторного потенциала и поля векторного потенциала
тока природных источников векторного потенциала и поля векторного потенциала  тока одного или более искусственных источников векторного потенциала, создают в локальной области пространства указанное поле векторного потенциала
тока одного или более искусственных источников векторного потенциала, создают в локальной области пространства указанное поле векторного потенциала  и воздействуют этим полем на поле космологического векторного потенциала
и воздействуют этим полем на поле космологического векторного потенциала  создавая при этом воздействии в упомянутой локальной области пространства поле указанного суммарного векторного потенциала
создавая при этом воздействии в упомянутой локальной области пространства поле указанного суммарного векторного потенциала  с пониженным по отношению к величине космологического векторного потенциала
с пониженным по отношению к величине космологического векторного потенциала  значением, получают и регистрируют физические эффекты, обусловленные созданием и существованием в пространстве области поля упомянутого суммарного потенциала
значением, получают и регистрируют физические эффекты, обусловленные созданием и существованием в пространстве области поля упомянутого суммарного потенциала  с пониженным значением и его изменениями, и определяют по указанным эффектам направление поля суммарного векторного потенциала
с пониженным значением и его изменениями, и определяют по указанным эффектам направление поля суммарного векторного потенциала  .
. тока искусственного источника векторного потенциала на поле космологического векторного потенциала
тока искусственного источника векторного потенциала на поле космологического векторного потенциала  осуществляют путем сканирования полем указанного векторного потенциала
осуществляют путем сканирования полем указанного векторного потенциала  пространства в диапазоне углов от 0 до 360o по отношению к одной из координатных осей космического аппарата.
пространства в диапазоне углов от 0 до 360o по отношению к одной из координатных осей космического аппарата. тока искусственных источников векторного потенциала на поле космологического векторного потенциала
тока искусственных источников векторного потенциала на поле космологического векторного потенциала  осуществляют путем создания в пространстве этими источниками стационарной системы полей, направленных в диапазоне углов от 0 до 360o по отношению к одной из координатных осей космического аппарата.
осуществляют путем создания в пространстве этими источниками стационарной системы полей, направленных в диапазоне углов от 0 до 360o по отношению к одной из координатных осей космического аппарата. с пониженным по отношению к величине космологического векторного потенциала
с пониженным по отношению к величине космологического векторного потенциала  значением, и определение направления поля суммарного векторного потенциала
значением, и определение направления поля суммарного векторного потенциала  осуществляют путем размещения в указанной локальной области пространства по крайней мере одного материального тела и регистрации величин и направлений сил
осуществляют путем размещения в указанной локальной области пространства по крайней мере одного материального тела и регистрации величин и направлений сил  возникающих при воздействии указанных полей векторного потенциала тока на физический вакуум и действующих на указанное тело в поле упомянутого суммарного векторного потенциала
возникающих при воздействии указанных полей векторного потенциала тока на физический вакуум и действующих на указанное тело в поле упомянутого суммарного векторного потенциала  при этом за направление поля суммарного векторного потенциала
при этом за направление поля суммарного векторного потенциала  принимают направление, соответствующее направлению в пространстве максимальной из зарегистрированных указанных сил
принимают направление, соответствующее направлению в пространстве максимальной из зарегистрированных указанных сил  действующих на упомянутое материальное тело.
действующих на упомянутое материальное тело. с пониженным по отношению к величине космологического векторного потенциала
с пониженным по отношению к величине космологического векторного потенциала  значением, и определение направления поля суммарного векторного потенциала
значением, и определение направления поля суммарного векторного потенциала  осуществляют путем размещения в указанной локальной области пространства по крайней мере одного материального тела, содержащего радиоактивное вещество, и регистрации активности и изменения активности распада радиоактивного вещества вследствие воздействия на него поля упомянутого суммарного векторного потенциала
осуществляют путем размещения в указанной локальной области пространства по крайней мере одного материального тела, содержащего радиоактивное вещество, и регистрации активности и изменения активности распада радиоактивного вещества вследствие воздействия на него поля упомянутого суммарного векторного потенциала  при этом за направление поля суммарного векторного потенциала
при этом за направление поля суммарного векторного потенциала  принимают направление, противоположное направлению в пространстве поля векторного потенциала
принимают направление, противоположное направлению в пространстве поля векторного потенциала  тока искусственного источника, при котором зарегистрирована минимальная активность распада радиоактивного вещества.
тока искусственного источника, при котором зарегистрирована минимальная активность распада радиоактивного вещества. тока в локальной области пространства создают путем размещения в указанной области пространства постоянных магнитов.
тока в локальной области пространства создают путем размещения в указанной области пространства постоянных магнитов. тока искусственного источника векторного потенциала в локальной области пространства создают путем пропускания электрического тока I по токоведущим элементам, расположенным в указанной области пространства.
тока искусственного источника векторного потенциала в локальной области пространства создают путем пропускания электрического тока I по токоведущим элементам, расположенным в указанной области пространства. тока искусственного источника на поле космологического векторного потенциала
тока искусственного источника на поле космологического векторного потенциала  осуществляют путем сканирования полем указанного векторного потенциала
осуществляют путем сканирования полем указанного векторного потенциала  пространства в диапазоне углов от 0 до 180o по отношению к одной из координатных осей космического аппарата, после чего изменяют направление пропускаемого электрического тока на противоположное и повторяют операцию сканирования пространства в том же диапазоне углов от 0 до 180o по отношению к той же координатной оси космического аппарата.
пространства в диапазоне углов от 0 до 180o по отношению к одной из координатных осей космического аппарата, после чего изменяют направление пропускаемого электрического тока на противоположное и повторяют операцию сканирования пространства в том же диапазоне углов от 0 до 180o по отношению к той же координатной оси космического аппарата. тока искусственных источников векторного потенциала и размещенных в указанной области пространства средств для регистрации физически эффектов, обусловленных созданием и существованием в пространстве локальной области поля суммарного потенциала
тока искусственных источников векторного потенциала и размещенных в указанной области пространства средств для регистрации физически эффектов, обусловленных созданием и существованием в пространстве локальной области поля суммарного потенциала  равного сумме поля космологического векторного потенциала
равного сумме поля космологического векторного потенциала  полей векторного потенциала
полей векторного потенциала  природных источников векторного потенциала и поля векторного потенциала
природных источников векторного потенциала и поля векторного потенциала  тока искусственных источников векторного потенциала, с пониженным по отношению к величине космологического векторного потенциала
тока искусственных источников векторного потенциала, с пониженным по отношению к величине космологического векторного потенциала  значением указанного векторного потенциала
значением указанного векторного потенциала  и его изменениями.
и его изменениями. тока искусственных источников векторного потенциала выполнена в виде соленоида, обмотка которого подсоединена к источнику электрического тока.
тока искусственных источников векторного потенциала выполнена в виде соленоида, обмотка которого подсоединена к источнику электрического тока. тока искусственных источников векторного потенциала выполнена в виде тороида, обмотка которого подсоединена к источнику электрического тока.
тока искусственных источников векторного потенциала выполнена в виде тороида, обмотка которого подсоединена к источнику электрического тока. тока искусственных источников векторного потенциала выполнена в виде набора постоянных магнитов.
тока искусственных источников векторного потенциала выполнена в виде набора постоянных магнитов. возникающих при воздействии указанных полей векторного потенциала тока на физический вакуум и действующих на указанное материальное тело в поле упомянутого суммарного векторного потенциала
возникающих при воздействии указанных полей векторного потенциала тока на физический вакуум и действующих на указанное материальное тело в поле упомянутого суммарного векторного потенциала  .
. .
. тока искусственных источников векторного потенциала.
тока искусственных источников векторного потенциала. тока искусственных источников векторного потенциала.
тока искусственных источников векторного потенциала. тока искусственных источников векторного потенциала с возможностью их перемещения относительно указанной системы и/или друг друга.
тока искусственных источников векторного потенциала с возможностью их перемещения относительно указанной системы и/или друг друга. тока искусственных источников векторного потенциала механически жестко относительно указанной системы.
тока искусственных источников векторного потенциала механически жестко относительно указанной системы. формируемые системами создания в локальной области пространства поля векторного потенциала
формируемые системами создания в локальной области пространства поля векторного потенциала  тока искусственных источников векторного потенциала указанных датчиков, ориентированы в диапазоне углов от 0 до 360o по отношению к одной из координатных осей космического аппарата.
тока искусственных источников векторного потенциала указанных датчиков, ориентированы в диапазоне углов от 0 до 360o по отношению к одной из координатных осей космического аппарата. выполнена в виде токовой обмотки, размещенной на замкнутой пространственной поверхности так, что направления отдельных элементов указанной обмотки ориентированы в диапазоне углов от 0 до 360o по отношению к одной из координатных осей космического аппарата.
выполнена в виде токовой обмотки, размещенной на замкнутой пространственной поверхности так, что направления отдельных элементов указанной обмотки ориентированы в диапазоне углов от 0 до 360o по отношению к одной из координатных осей космического аппарата.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Романеев Н.Ф., Хрунов Е.В | |||
| Астрономическая навигация космических кораблей | |||
| -М.: Машиностроение, 1976, с.9 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Там же, с.24 | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Способ определения навигационных параметров | 1981 |
|
SU1098382A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕКУЩИХ ЗНАЧЕНИЙ КООРДИНАТ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 0 |
|
SU182347A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| 0 |
|
SU182423A1 | |
