Изобретение относится к области транспортного машиностроения, в частности к автомобилестроению, и может быть использовано в автомобилях со всеми управляемыми колесами.
Известна система управления колесами транспортного средства по авт. св. N 1675147. Система содержит реечный рулевой механизм передних колес, входное звено которого кинематически связано с рулевым валом, а выходные звенья - с передними управляемыми колесами транспортного средства и посредством выходного и карданного валов - с входным валом рулевого механизма задних колес, выполненного в виде конической зубчатой пары, шестерня которой закреплена на входном валу рулевого механизма задних колес, а колесо снабжено эксцентриком, сопряженным со скользящим вкладышем в направляющей, соединенной с рулевыми тягами задних управляемых колес транспортного средства.
Недостатком ее является определенная сложность конструкции из-за сравнительно большого количества деталей в рулевом механизме задних колес (наличия конической зубчатой пары).
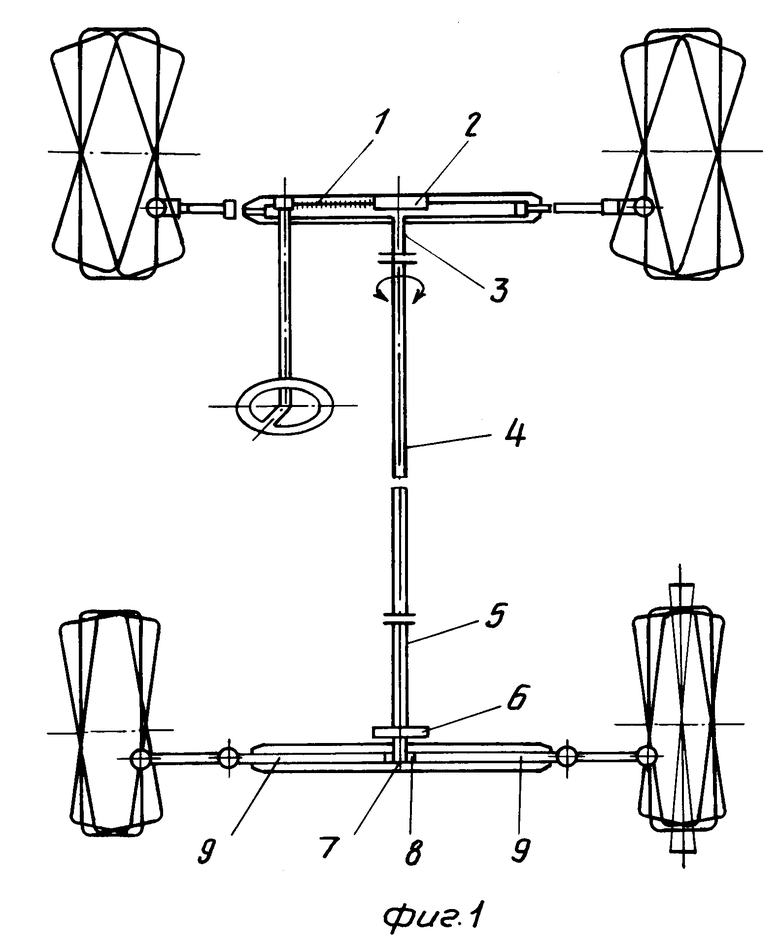
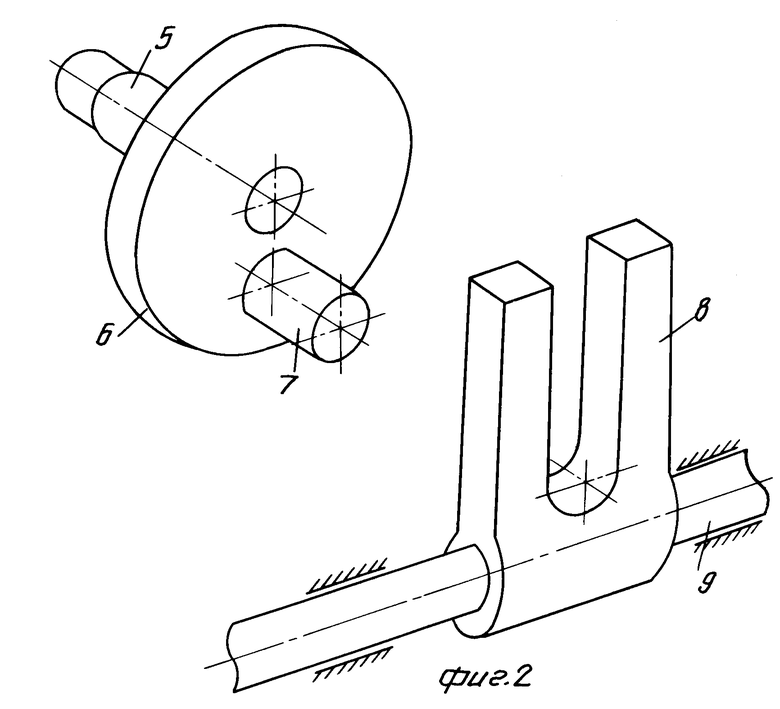
На фиг. 1 показана система управления всеми колесами в зависимости от угла поворота рулевого колеса; на фиг. 2 - рулевой механизм задних колес в аксонометрии.
Система содержит реечный рулевой механизм передних колес, входное звено которого кинематически связано с рулевым валом, а выходные звенья - с передними управляемыми колесами транспортного средства посредством передачи рейка 1 - зубчатое колесо 2. Выходной вал 3 соединен карданным валом 4 с входным валом 5 рулевого механизма задних колес. На заднем конце входного вала 5 установлен диск 6, снабженный эксцентриком 7.
Эксцентрик 7 введен непосредственно в вертикальный паз вилки 8 рулевых тяг 9, скользящих в горизонтальных направляющих, и может быть снабжен подшипником скольжения, например игольчатым.
Система управления колесами транспортного средства работает следующим образом.
В исходном положении рулевого колеса передние и задние колеса установлены в прямом направлении (параллельно оси карданного вала). При этом эксцентрик 7 расположен в середине (по вертикали) вертикального паза вилки 8 скользящих в горизонтальных направляющих рулевых тяг 9 задних колес и в одной вертикальной продольной плоскости, совпадающей с осью карданного вала 4.
При повороте рулевого колеса вправо от исходного и отклонении передних колес до 1/3 от полного отклонения вправо диск 6 повернется на 90о таким образом, что эксцентрик 7 займет крайнее левое положение. При этом эксцентрик 7 перемещается в вертикальном пазу вилки 8 и толкает ее и скользящие в горизонтальных направляющих рулевые тяги 9 в крайнее левое положение, тяги при этом поворачивают задние колеса максимально вправо (на расчетный угол).
При дальнейшем повороте рулевого колеса вправо и отклонении передних колес до 2/3 полного отклонения вправо диск 6 повернется на 90о таким образом, что эксцентрик 7 займет крайнее левое положение. При этом эксцентрик 7 перемещается в вертикальном пазу вилки 8 и толкает ее и скользящие в горизонтальных направляющих рулевые тяги 9 в крайнее левое положение, тяги 9 поворачивают задние колеса максимально вправо (на расчетный угол).
При дальнейшем повороте рулевого колеса вправо и отклонении передних колес до 2/3 полного отклонения вправо диск 6 повернется еще на 90о (всего уже на 180о), эксцентрик 7 снова установится в одной вертикальной продольной плоскости с осью карданного вала (на фиг. 2 эксцентрик 7 будет вверху), а задние колеса тягами 9 установятся в прямом направлении.
При повороте рулевого колеса максимально вправо в полном отклонении передних колес вправо диск 6 повернется еще на 90о (всего уже на 270о), эксцентрик 7 займет крайнее правое положение, а задние колеса повернутся рулевыми тягами 9 максимально влево.
При обратном повороте рулевого колеса в исходное положение все повторяется в обратной последовательности.
При повороте рулевого колеса от исходного максимально влево передние колеса вначале отклонятся на 1/3 от полного отклонения влево, далее - на 2/3, а затем и до полного отклонения влево. Диск 6 вначале повернется на 90о, далее на 180о, а затем на 270о, но уже в обратном направлении (по сравнению с поворотом рулевого колеса вправо от исходного). На фиг. 2 нахождение эксцентрика 7 соответственно: крайнее правое, верхнее, крайнее левое). При этом задние колеса вначале повернутся максимально влево, далее вернутся в прямое направление, а затем повернутся максимально вправо.
Передаточное отношение зубчатой пары рейка 1 - зубчатое колесо 2 выбрано таким, чтобы в процессе поворота рулевого колеса вправо до упора, т.е. при отклонении передних колес от прямого направления максимально вправо, задние колеса вначале отклонились на расчетный угол вправо, далее возвратились в исходное прямое положение, а затем, до максимального отклонения передних колес вправо, отклонились влево (противофазно передним).
Например, при 1,5 оборотах рулевого колеса вправо от исходного положения для полного отклонения передних колес от прямого направления вправо диск 6 должен повернуться на 270о в одном направлении. Аналогично при 1,5 оборотах рулевого колеса влево от исходного положения для полного отклонения передних колес от прямого направления влево диск 6 должен повернуться на 270о в другом направлении.
Таким образом, при повороте передних колес из крайнего правого в крайнее левое положение задние колеса повернутся из крайнего левого в крайнее правое, далее из крайнего правого в крайнее левое, а затем из крайнего левого в крайнее правое. Диск 6 при этом повернется на 1,5 оборота. Поэтому задние колеса при этом процессе три раза будут установлены в прямом направлении.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления колесами транспортного средства | 1990 |
|
SU1754549A1 |
| Система рулевого управления транспортного средства | 1989 |
|
SU1675147A1 |
| АЭРОМОБИЛЬ | 1999 |
|
RU2148004C1 |
| АВТОМОБИЛЬ С ГИДРОГАЗОДИНАМИЧЕСКИМ ДВИГАТЕЛЕМ | 1999 |
|
RU2176959C2 |
| СИСТЕМА УПРАВЛЕНИЯ КОЛЕСАМИ ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2029699C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО С УПРАВЛЕНИЕМ КРЕНОМ | 2003 |
|
RU2264306C2 |
| Аэромобиль | 2015 |
|
RU2609541C1 |
| МОТОРНОЕ СУДНО | 1999 |
|
RU2167081C1 |
| ТРАНСПОРТНЫЙ САМОЛЕТ "САМОЛЕТ В.С.ГРИГОРЧУКА" | 1995 |
|
RU2086478C1 |
| ВЕРТОЛЁТ | 2001 |
|
RU2222474C2 |
Использование: относится к области транспортного машиностроения, в частности к автомобилестроению, и может быть использовано в автомобилях со всеми управляемыми колесами. Сущность изобретения: рейка связана с передними колесами и посредством зубчатых колес с рулевым валом и с входным валом рулевого механизма задних управляемых колес. Последний выполнен в виде диска с эксцентриком, взаимодействующим с пазом вилки. Вилка соединена с тягами задних колес. 1 з.п.ф-лы, 2 ил.
| Система рулевого управления транспортного средства | 1989 |
|
SU1675147A1 |
