Изобретение относится к автоматическим системам регулирования силовыми установками летательных аппаратов (СУЛА) и используется для управления частотой вращения винта и тягой авиационного турбовинтового двигателя (ТВД).
Наиболее близким техническим решением, выбранным в качестве прототипа, является способ регулирования авиационного ТВД [1] путем измерения частоты вращения двигателя и формирования сигнала управления на изменение угла установки лопастей винта; при этом можно измерять тягу двигателя и формировать сигнал управления на изменение расхода топлива.
Недостатком прототипа является то, что данный способ не обеспечивает высокой точности управления, так как значение задающих воздействий выбирается по усредненным характеристикам для большой группы или целого класса двигателей; кроме того, для каждого конкретного двигателя значения nзад и Gзад являются неоптимальными в части поддержания минимально допустимых расходных характеристик.
Целью изобретения является повышение точности регулирования.
Это достигается способом регулирования авиационного турбовинтового двигателя путем измерения частоты вращения двигателя и тяги двигателя и формирования сигнала управления на изменение угла установки лопастей винта и расхода топлива. В отличие от прототипа дополнительно измеряют текущее значение расхода топлива и значения ошибок управления по тяге и частоте вращения ротора при постоянных условиях полета в течение заданного интервала времени, формируют массив значений расхода топлива и частоты вращения ротора, при которых значения ошибок управления по тяге и частоте вращения ротора попадают в интервал их допустимых значений. По результатам статистической обработки массива определяют минимальное значение расхода топлива и соответствующее ему оптимальное значение частоты вращения ротора и формируют сигнал поправки на задающее воздействие по частоте ротора.
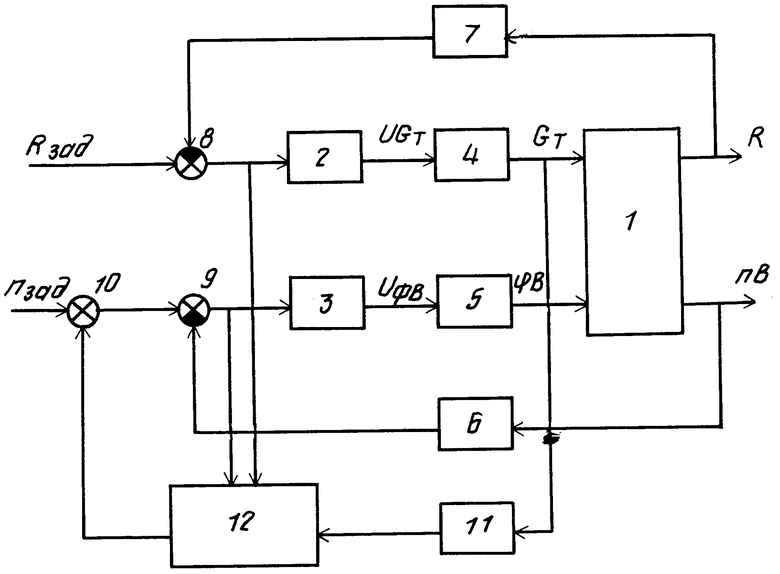
На чертеже представлена структурная схема устройства, реализующего предлагаемый способ.
Устройство содержит турбовинтовой двигатель (ТВД) 1, регулятор 2 расхода топлива, регулятор частоты вращения 3, исполнительный механизм 4, исполнительный механизм 5, датчик 6 значения частоты вращения, датчик 7 значения тяги, элементы сравнения 8 и 9, сумматор 10, датчик 11 значений текущего расхода топлива и блок 12 оптимизации.
Способ реализуют следующим образом. Управление ТВД по предложенному способу состоит из двух этапов: этапа накопления статистики и обучения; этапа текущего управления и адаптации.
На первом этапе осуществляется накопление статистических данных о процессах управления в системе при выборе управляющих воздействий по детерминированному алгоритму в течение времени обучения tобуч и обработка данной статистики. В качестве статистических параметров используются значения замеренных в равноотстоящие моменты времени t1величин: частоты вращения винта ТВД nтек; тяги Rтек; расхода топлива Gт.тек.
На первом этапе управление ТВД происходит следующим образом. Значение текущей частоты вращения, снимаемой с датчика 6, вычитается из значения задающего воздействия nзад и пропорционально полученной ошибке En=nзад-nтек регулятором 3 выбирается управляющее воздействие Un, которое подается на исполнительный механизм 5, непосредственно управляющий частотой вращения винта ТВД.
Значение текущей тяги, снимаемой с датчика 7, вычитается из значения задающего воздействия Rзад и пропорционально полученной ошибке ER=Rзад-Rтек регулятором 2 выбирается управляющее воздействие, которое подается на исполнительный механизм 4, регулирующий подачу топлива в ТВД, а соответственно, и тягу.
Значение выходного сигнала блока 12 оптимизации Δ nзад на этом этапе равно нулю, и значение скорректированного задающего воздействия на выходе сумматора 10 nзад= nзад, т. е. коррекция задающего воздействия по частоте вращения не производится. На блок оптимизации поступают сигналы, соответствующие значению ошибки управления по тяге, ограниченной предельно допустимыми значениями, и значению ошибки управления по частоте вращения, а также значение расхода топлива, снимаемое с датчика 11. Первоначально интервал разбивается на М равных отрезков, границы которых задаются значениями:
Δ n0, Δn1, Δn2,...,Δ nK,..., ΔnM, (1) причем Δ n0= Δnmin,Δ nM=Δ nmax. Таким образом, в каждый момент времени t1 можно с точностью до Q описать значение nтек, зная лишь номер отрезка разбиения К, в который попадает это значение, где Q= =( Δnmax- Δnmin)/2M.
Далее в блоке оптимизации 12 в каждый 1-й момент времени формируются два массива N и G с размерностью М следующим образом. В случае попадания ERi в отрезок [бRmin, бRmax] определяется отрезок разбиения (1), в который попало значение Eni и его индекс К из условия:
Eni-[Δ nK-1,Δ nK]. (2)
Затем производятся следующие действия над значениями элементов массивов N(K) и G(K):
G(K)=G(K)N(K)+Gтi
N(K)=N(K)+1 (3)
G(K)=G(K)/N(K).
На этом этап обучения завершается.
На втором этапе управление ТВД происходит следующим образом. На блок оптимизации 12 поступают сигналы, соответствующие значению ошибки управления по тяге ERi, сигналы, соответствующие значению ошибки управления по частоте вращения Eni, а также значению расхода топлива Gтi, снимаемому с датчика 11.
В случае попадания значения ERi в допустимый отрезок определяется индекс отрезка разбиения (1) - К из условия (2), замеряют текущее значение расхода топлива. Затем над значениями массивов F(K) и N(K) производятся действия (3). Далее определяется индекс минимального элемента массива G-GKo из условия:
GKo= minKGK; и в соответствии с индексом Ко вычисляется значение корректирующего воздействия Δnопт следующим образом:
Δnопт=1/2 nК+Δn
nК+Δn .
.
Cигнал, соответствующий значению корректирующего воздействия Δnопт, поступает в сумматор 10, где и происходит коррекция значения частоты вращения ротора ТВД nтек.
Предлагаемый способ регулирования авиационного ТВД обеспечивает повышение точности управления и выбор оптимального задающего воздействия по частоте вращения, обеспечивающего минимальный расход топлива при поддержании тяги на заданном уровне за счет постоянной адаптации системы регулирования к изменяющимся условиям полета, вследствие чего увеличивается дальность полета. Вместе с тем при увеличении точности управления режим эксплуатации двигателя приближается к оптимальному, вследствие чего увеличивается его долговечность.
Использование: автоматическое регулирование силовыми установками летательных аппаратов, управление частотой вращения винта и тягой авиационного турбовинтового двигателя. Сущность изобретения: при регулировании авиационного турбовинтового двигателя путем измерения частоты вращения двигателя и тяги двигателя и формирования сигнала управления на изменение угла установки лопастей винта и расхода топлива измеряют текущее значение расхода топлива и значения ошибок управления по тяге и частоте вращения ротора при постоянных условиях полета в течение заданного интервала времени, формируют массив значений расхода топлива и частоты вращения ротора, при которых значения ошибок управления по тяге и частоте вращения ротора попадают в интервал их допустимых значений. По результатам статистической обработки массива определяют минимальное значение расхода топлива и соответствующее ему оптимальное значение частоты вращения ротора и формируют сигнал поправки на задающее воздействие по частоте ротора. 1ил.
СПОСОБ РЕГУЛИРОВАНИЯ АВИАЦИОННОГО ТУРБОВИНТОВОГО ДВИГАТЕЛЯ путем измерения частоты вращения и тяги двигателя и формирования сигнала управления на изменение угла установки лопастей винта и расхода топлива, отличающийся тем, что, с целью повышения точности, измеряют текущее значение расхода топлива и значения ошибок управления по тяге и частоте вращения ротора при постоянных условиях полета в течение заданного интервала времени, формируют массив значений расхода топлива и частоты вращения ротора, при которых значения ошибок управления по тяге и частоте вращения ротора попадают в интервал их допустимых значений, по результатам статистической обработки массива определяют минимальное значение расхода топлива и соответствующее ему оптимальное значение частоты вращения ротора и по последнему формируют сигнал поправки на задающее воздействие по частоте вращения ротора.
| Шевяков А.А | |||
| Автоматика авиационных и ракетных силовых установок, М.: Машиностроение, 1970, с.296. |
