Изобретение относится к авиационной технике, в частности к автоматическому управлению ГТД в составе многодвигательной силовой газотурбинной установки.
Известен способ автоматического управления турбовинтовой двигательной установкой путем измерения частоты вращения и ускорения ротора турбокомпрессора, сравнения измеренной частоты вращения ротора турбокомпрессора с заданной и управления расходом топлива на установившихся режимах пропорционально величине отклонения частоты вращения ротора турбокомпрессора от заданной величины, сравнения измеренного ускорения ротора турбокомпрессора с заданным и управления расходом топлива на переходных режимах пропорционально величине отклонения ускорения ротора турбокомпрессора от заданной величины, измерения частоты вращения винта и управления углом установки лопасти винта пропорционально измеренной частоте вращения винта.
Данный способ не обеспечивает приемлемую точность поддержания характеристик переходных процессов в течение выработки ресурса работы двигателей. При использовании временного закона подачи топлива в двигатель на переходных режимах может возникнуть разнотяговость многотопливной силовой установки летательного аппарата, что приводит к нежелательным эволюциям самолета.
Целью изобретения являются повышение динамической точности регулирования и стабильности процессов на переходных режимах.
Цель достигается тем, что в способе автоматического управления турбовинтовой двигательной установкой измеряют частоту вращения и ускорения ротора турбокомпрессора, сравнивают измеренную частоту вращения ротора турбокомпрессора с заданной и управляют расходом топлива на установившихся режимах пропорционально величине отклонения частоты вращения ротора турбокомпрессора от заданной величины, сравнивают измеренное ускорение ротора турбокомпрессора с заданным и управляют расходом топлива на переходных режимах пропорционально величине отклонения ускорения ротора турбокомпрессора от заданной величины, измеряют частоту вращения винта и управляют углом установки лопасти винта пропорционально измеренной частоте вращения винта.
Система дополнительно содержит сигнал регулирования скорости изменения тяги винта и логику включения этого канала в работу, обеспечивающую стабильность протекания переходных процессов по тяге на переходных режимах, так как скорость изменения тяги поддерживается по заданной программе, вследствие этого повышается динамическая точность регулирования по тяге.
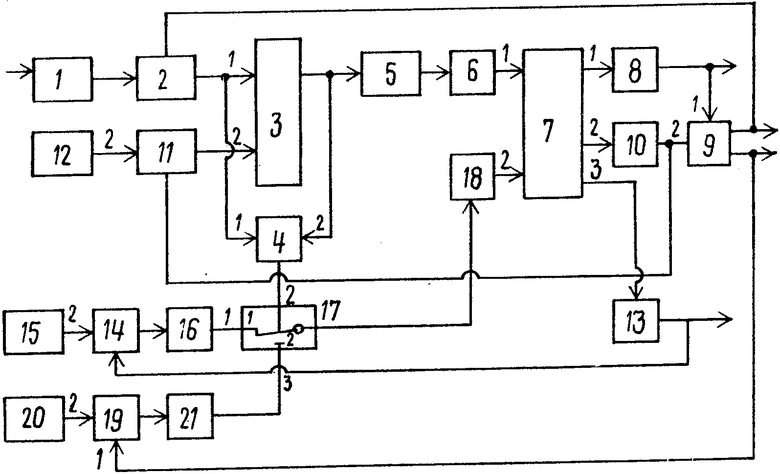
На чертеже представлена функциональная схема системы автоматического управления турбовинтовентиляторной установкой, реализующей заявляемый способ.
Система, реализующая способ, содержит задатчик 1 параметра динамических режимов двигательной установки (ДУ) - скорости изменения частоты вращения ротора турбокомпрессора, выход которого соединен с органом 2 сравнения, выход которого соединен с первым входом селектора 3 минимума и первым входом первого логического элемента 4 сравнения. Выход селектора 3 минимума соединен с вторым входом элемента 4 сравнения и через формирователь 5 управляющего сигнала, исполнительный механизм (дозатор топлива) 6 - с первым входом двигательной установки 7, выход датчика 8 частоты вращения ротора турбокомпрессора, вход которого соединен с первым выходом ДУ 7, через первый вход дифференциального звена 9 соединен с вторым входом органа 2 сравнения. Выход датчика тяги винтовентилятора 10, вход которого соединен с вторым выходом ДУ 7, соединен с входом второго элемента 11 сравнения, второй вход которого соединен с задатчиком параметра режима двигательной установки - тяги винтовентилятора 12, выход элемента 11 сравнения соединен с вторым входом селектора 3 минимума, выход датчика частоты вращения винтовентилятора 13, вход которого соединен с третьим выходом ДУ 7, соединен с первым входом третьего элемента 14 сравнения, второй вход которого соединен с задатчиком частоты вращения винтовентилятора 15, выход элемента 14 сравнения через формирователь 16 управляющего сигнала соединен с первым входом логического ключа 17, вторым входом логического ключа 17 является выход логического элемента 4 сравнения, выход логического ключа 17 через исполнительный механизм 18 соединен с вторым входом ДУ 7, выход датчика тяги винтовентилятора 10 через второй вход дифференциального звена 9 соединен с первым входом четвертого органа 19 сравнения, второй вход которого соединен с задатчиком скорости изменения тяги винтовентилятора 20, выход органа 19 сравнения через формирователь 21 управляющего сигнала соединен с третьим входом логического ключа 17.
Способ реализуется следующим образом.
При работе ДУ 7 на установившихся режимах селектор 3 минимума пропускает сигнал рассогласования с элемента 11 сравнения. Таким образом, условие равенства в логическом элементе 4 сравнения не выполняется, и логический ключ 17 находится в положении (1). Это положение логического ключа 17 замыкает канал регулирования частоты вращения винтовентилятора. При работе ДУ 7 на переходных режимах при появлении текущего значения скорости изменения частоты вращения турбокомпрессора происходит переключение селектора 3 на канал регулирования скорости изменения частоты вращения турбокомпрессора. В момент пропускания через селектор 3 минимума сигнала рассогласования с органа 2 сравнения, по условию равенства сигналов на выходе органа 2 сравнения и выходе селектора 3, происходит переключение логического ключа 17 в положение (2). Это положение логического ключа 17 замыкает канал регулирования скорости изменения тяги винтовентилятора. Канал регулирования скорости изменения тяги винтовентилятора Rв путем варьирования скорости изменения угла установки лопасти винтовентилятора пропорционально отклонению текущего значения скорости изменения тяги от заданного обеспечивает поддержание заданного закона по скорости изменения тяги независимо от индивидуальных особенностей двигателей и степени их износа. Тем самым обеспечивается постоянство динамических характеристик двигательной установки по мере выработки ее ресурса и регулирование приемистости многодвигательной силовой установки, исключающее разнотяговость двигателей.
В процессе приемистости, согласно прототипу, управление винтовентилятором осуществляется по закону: nв = nвзад = сonst c воздействием на угол установки лопасти винтовентилятора (ϕв). Так как при разгоне газогенератора по закону  =
=  увеличивается мощность на турбине винтовентилятора Nтв, то регулятор nв = nвзад = соnst реагирует на это затяжелением винта (увеличением ϕв). Таким образом при наличии избыточной мощности на турбине Δ Nтв всегда существует статическая ошибка регулирования nв. В предлагаемой схеме выдерживается не nвзад, а
увеличивается мощность на турбине винтовентилятора Nтв, то регулятор nв = nвзад = соnst реагирует на это затяжелением винта (увеличением ϕв). Таким образом при наличии избыточной мощности на турбине Δ Nтв всегда существует статическая ошибка регулирования nв. В предлагаемой схеме выдерживается не nвзад, а  =
=  зад, при этом nв может изменяться для компенсации ошибки регулирования
зад, при этом nв может изменяться для компенсации ошибки регулирования  , т.е. nв = var.
, т.е. nв = var.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТУРБОВИНТОВОЙ ДВИГАТЕЛЬНОЙ УСТАНОВКОЙ | 1991 |
|
RU2006633C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКОЙ | 2001 |
|
RU2204044C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ С ФОРСАЖНОЙ КАМЕРОЙ СГОРАНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2466287C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ НА ДИНАМИЧЕСКИХ РЕЖИМАХ РАЗГОНА И ДРОССЕЛИРОВАНИЯ | 2006 |
|
RU2337250C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2490492C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ТУРБОВИНТОВОГО ДВИГАТЕЛЯ | 1992 |
|
RU2022144C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2409751C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ НАДДУВОЧНОГО ВОЗДУХА ДИЗЕЛЬ-ГЕНЕРАТОРА В ДИНАМИЧЕСКИХ РЕЖИМАХ | 2015 |
|
RU2637793C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ПОДАЧИ ТОПЛИВА В КАМЕРУ СГОРАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2474711C1 |
| СПОСОБ ПОДДЕРЖАНИЯ ЧИСЛА ОБОРОТОВ НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА В ДОПУСТИМЫХ ПРЕДЕЛАХ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2231479C2 |
Использование: авиационная техника, автоматическое управление ГТД в составе многодвигательной силовой установки. Сущность изобретения: на переходных режимах работы двигательной установки управление расходом топлива производят из условия поддержания заданного значения ускорения ротора турбокомпрессора, а управление углом установки лопасти винта производят из условия поддержания заданных темпов изменения тяги. 1 ил.
СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТУРБОВИНТОВОЙ ДВИГАТЕЛЬНОЙ УСТАНОВКОЙ путем измерения частоты вращения и ускорения ротора турбокомпрессора, сравнения измеренной частоты вращения ротора турбокомпрессора с заданной и управления расходом топлива на установившихся режимах пропорционально величине отклонения частоты вращения ротора турбокомпрессора от заданной величины, сравнения измеренного ускорения ротора турбокомпрессора с заданным и управления расходом топлива на переходных режимах пропорционально величине отклонения ускорения ротора турбокомпрессора от заданной величины, измерения частоты вращения винта и управления углом установки лопасти винта пропорционально измеренной частоте вращения винта, отличающийся тем, что, с целью повышения динамической точности регулирования и стабильности процессов на переходных режимах, дополнительно измеряют скорость изменения тяги винта, сравнивают ее с заданной величиной, а управление на переходных режимах углом установки лопаста винта дополнительно осуществляют пропорционально величине отклонения текущего значения скорости изменения тяги от заданной.
| Теория автоматического управления силовыми установками летательных аппаратов | |||
| Под ред.А.А.Шевекова | |||
| М.: Машиностроение, 1976, с.210. |
