Изобретение относится к электротехнике и может быть использовано при создании приводов транспортно-согласующих и робототехнических устройств поступательного перемещения.
Известен линейный электропривод, содержащий индуктор с магнитопроводом, многофазными обмотками подмагничивания, а также подвижный элемент [1].
Известен также линейный электропривод, принятый в качестве прототипа, содержащий индуктор, вторичный элемент и расположенный между ними ферромагнитный слой управления, подмагничиваемый обмоткой управления [2].
Недостатком известных линейных электроприводов, в том числе и прототипа, является неполное использование установленной мощности индуктора при наибольшем развиваемом усилии и узкий диапазон регулирования тягового усилия. Это обусловлено тем, что ферромагнитный слой управления даже при максимальном насыщении, когда электропривод развивает наибольшее тяговое усилие, шунтирует часть магнитного потока индуктора. Поэтому реально достижимые рабочий поток взаимоиндукции, тяговое усилие и мощность электропривода всегда остаются меньше своих значений, обеспечиваемых приводом при отсутствии ферромагнитного слоя управления.
Целью изобретения является обеспечение полного использования установленной мощности индуктора и расширение диапазона регулирования тягового усилия.
Цель достигается тем, что в известном лнейном электроприводе, содержащем индуктор, вторичный элемент, слой управления между ними с обмоткой управления, слой управления выполнен полым из диэлектрика, внутренняя полость которого заполнена магнитной жидкостью, и установлен вертикально в рабочей зоне индуктора, при этом часть слоя управления и обмотка управления размещены вне рабочей зоны индуктора.
Кроме этого согласно другому варианту изобретения известный электропривод снабжен упругой оболокой, а обмотка управления выполнена с подвижным сердечником, при этом внутренняя полость слоя управления сообщена вне рабочей зоны индуктора с полостью упругой оболочки, которая с противоположной стороны жестко связана с подвижным сердечником обмотки управления с возможностью деформирования в направлении перемещения сердечника.
Предлагаемый электропривод отличается от прототипа, следовательно, заявляемое устройство соответствует критерию изобретения "новизна".
При проведении поиска существенных признаков, отличающих заявляемое устройство от прототипа, не обнаружено источников патентной и научно-технической информации, свидетельствующих об их известности, следовательно, заявляемое устройство соответствует критерию изобретения "существенные отличия".
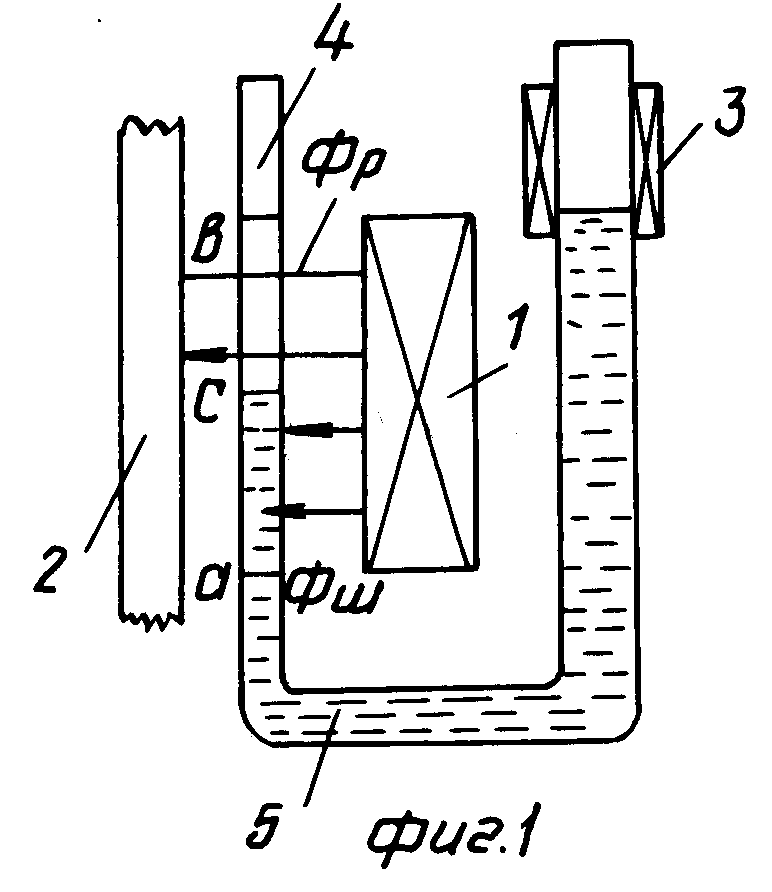
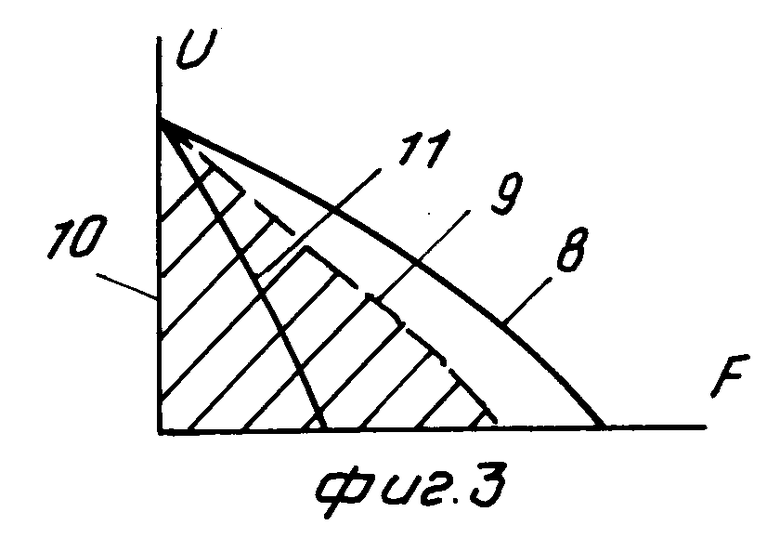
На фиг.1 приведен пример его конкретного выполнения; на фиг.2 представлен другой вариант выполнения линейного электропривода; на фиг.3 показаны формируемые механические характеристики электропривода: V = f(F), где V - скорость перемещения вторичного элемента; F - развиваемое тяговое усилие.
На фиг.1 и 2 использованы следующие обозначения: Фр - рабочий магнитный поток взаимоиндукции; Фш - поток, шунтируемый слоем управления; a, b и с - положения уровня магнитной жидкости во внутренней полости слоя управления.
Линейный электропривод (см. фиг. 1) содержит индуктор 1, вторичный элемент 2 и обмотку 3 управления. Слой управления (на чертеже не обозначен) выполнен полым из диэлектрика в виде оболочки 4, во внутреннюю полость которой введена магнитная жидкость 5. Часть слоя управления и охватывающая его обмотка 3 управления размещены вне рабочей зоны индуктора 1. Согласно другому варианту (см. фиг. 2) внутрення полость слоя управления, иначе - часть полой оболочки 4, вне рабочей зоны индуктора 1 сообщена с внутренней полостью упругой деформируемой оболочки 6, которая с противоположной стороны жестко связана с подвижным сердечником 7 обмотки 3 управления с возможностью деформирования в направлении перемещения сердечника 7.
Работе линейного асинхронного электропривода с максимальным тяговым усилием F = Fmax соответствует механическая характеристика 8 (см. фиг.3), которая лежит правее предельной механической характеристики 9 по прототипу. Режим работы с нулевым тяговым усилием F = 0 представлен механической характеристикой 10, а промежуточная механическая характеристика 11 соответствует режиму работы привода с тяговым усилием 0 < F < Fmax.
Линейный электропривод работает следующим образом. При подключении индуктора 1 к питающей сети образуется магнитный поток Фи индуктора (на фиг.1 не показан), часть которого - рабочий поток взаимоиндукции Фр - взаимодействует с вторичным элементом 2 и создает тяговое усилие F в направлении, перпендикулярном плоскости чертежа. Другая часть потока Фшиндуктора 1 шунтируется магнитной жидкостью 5 в оболочке 4 и не создает тягового усилия. Значение тягового усилия F электропривода от соотношения двух потоков Фр и Фш, которые изменяются в зависимости от уровня, а следовательно, магнитной жидкости 5, определяемого значением тока в обмотке 3 управления. При этом изменение уровня магнитной жидкости 5 обеспечивается непосредственным воздействием на нее магнитного поля тока обмотки 3 управления (см. Ольховский А. Н. и др. Магнитные жидкости в средствах измерения теплоэнергетических величин измерения, контроль, автоматизация. /Информ. прибор, 1989, N 4, с. 43-49/).
В результате этого воздействия магнитная жидкость втягивается в обмотку 3 управления и ее уровень в оболочке 4 между индуктором 1 и вторичным элементом 2 изменяется. При отсутствии тока в обмотке 3 управления уровень магнитной жидкости в оболочке 4 максимальный и соответствует положению b на фиг. 1. В этом случае слой магнитной жидкости 5 полностью шунтирует магнитный поток Фи индуктора 1, а рабочий поток взаимоиндукции Фр равен 0 (Фш= Фи). В соответствии с этим электропривод не развивает тягового усилия (F = 0) и формируется механическая характеристика 10 (фиг.3).
При наибольшем токе в обмотке 3 управления магнитная жидкость максимально втянута в оболочку 3, в результате чего ее уровень в оболочке 4 соответствует положению а, т.е. по существу в рабочей зоне индуктора 1 магнитная жидкость 5 отсутствует. При этом весь магнитный поток Фи индуктора является рабочим Фр, а поток Фш = 0. Электропривод развивает максимальное для данного индуктора тяговое усилие F = Fmax, значение которого больше наивысшего достижимого у прототипа значения Fmax', так как у последнего поток Фш≠ 0. Для линейного асинхронного привода формируется механическая характеристика 8 (фиг.3), которая лежит правее предельной механической характеристики 9, соответствующей прототипу.
При промежуточных значениях тока управления в обмотке 3 уровень магнитной жидкости 5 соответствует положению с, находящемуся между положениями а и b, имеются рабочий поток Фр и шунтируемый Фш (Фр≠0, Фш≠0). Привод развивает тяговое усилие 0 < F < Fmax, определяемое соотношением Фр и Фш, а его механическая характеристика 11 занимает промежуточное положение между характеристиками 8 и 10 (см. фиг.3). Таким образом, регулируя величину тока в обмотке 3 управления, можно установить любой уровень магнитной жидкости 5 между положениями а и b на фиг.1 и получить любые тяговые усилия F и механическую характеристику V = f(F) в интервале между характеристиками 8 и 9.
Таким образом, при уровне магнитной жидкости 5, соответствующем положению а (фиг.1), реализуется наибольшее возможное для данного индуктора и зазора между индуктором 1 и вторичным элементом 2 тяговое усилие F и формируется предельная механическая характеристика 8, лежащая правее наибольшей достижимой для прототипа характеристики 9. Поэтому диапазон регулирования тягового усилия заявляемого линейного электропривода, соответствующий области между характеристиками 8 и 10, больше диапазона регулирования тягового усилия в прототипе (заштрихованная область на фиг.3). Соответственно, при работе линейного электропривода на характеристике 8 реализуется полная установленная мощность индуктора, таким образом, расширяется также диапазон использования установленной мощности.
При выполнении электропривода согласно второму варианту (фиг.2) изменение положения уровня магнитной жидкости 5 обеспечивается также благодаря изменению тока в обмотке 3 управления. При отсутствии тока в обмотке 3 управления сердечник 7 под действием сил упругости деформируемой оболочки 6 занимает крайнее правое положение. Внутренний объем оболочки 6 при этом максимален, а положение уровня магнитной жидкости 5 минимален и соответствует положению а. В рабочей зоне индуктора 1 отсутствует магнитная жидкость, поэтому магнитный поток индуктора 1 Фи является рабочим Фр, а поток Фш = 0. Электропривод в этом случае развивает максимальное для данного индуктора тяговое усилие F = Fmax. Для электропривода формируется механическая характеристика 8.
При подаче в обмотке 3 управления наибольшего управляющего тока подвижный сердечник 7 втягивается в обмотку 3, перемещаясь влево на максимальное значение хода, оболочка 6, сжимаясь, уменьшает объем своей внутренней полости до минимального. При этом уровень магнитной жидкости 5 соответствует положению b в полой оболочке 4, т.е. максимальному положению, происходит полное шунтирование магнитного потока Фи индуктора 1, а рабочий поток взаимоиндукции равен 0 (Фш = Фи). Соответственно электропривод не развивает тягового усилия (F = 0) и формируется механическая характеристика 10. При промежуточных положениях уровня магнитной жидкости работа электропривода происходит аналогично рассмотренному выше варианту. В обоих представленных вариантах электропривода регулирование тягового усилия осуществляют изменением тока в обмотке 3 управления.
На основании изложенного можно сделать вывод о том, что по сравнению с известными устройствами заявляемый электропривод обладает следующими преимуществами: при отсутствии магнитной жидкости в рабочей зоне (зазоре) индуктора реализуется максимальное для данного индуктора и зазора тяговое усилие, т.е. обеспечивается полное использование установленной мощности индуктора, обеспечивается также большой диапазон регулирования тягового усилия.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛИНЕЙНЫЙ ЭЛЕКТРОПРИВОД | 1991 |
|
RU2024167C1 |
| СПОСОБ УПРАВЛЕНИЯ ЛИНЕЙНЫМ ЭЛЕКТРОПРИВОДОМ | 1991 |
|
RU2050674C1 |
| ЛИНЕЙНЫЙ ЭЛЕКТРОПРИВОД | 1992 |
|
RU2046524C1 |
| Линейный асинхронный двигатель | 1980 |
|
SU917271A1 |
| ЛИНЕЙНЫЙ ЭЛЕКТРОПРИВОД | 1993 |
|
RU2050676C1 |
| ВЕНТИЛЬНО-ИНДУКТОРНЫЙ РЕАКТИВНЫЙ ДВИГАТЕЛЬ | 1999 |
|
RU2159494C1 |
| СПОСОБ УПРАВЛЕНИЯ РАБОТОЙ УБОРОЧНОЙ МАШИНЫ | 1994 |
|
RU2078170C1 |
| ВЕНТИЛЬНО-ИНДУКТОРНАЯ МАШИНА | 2001 |
|
RU2189685C1 |
| УСТРОЙСТВО ДЛЯ ДИНАМИЧЕСКИХ ИСПЫТАНИЙ ДОРОЖНЫХ ОДЕЖД | 1997 |
|
RU2134738C1 |
| ЛИНЕЙНЫЙ ЭЛЕКТРОПРИВОД | 1993 |
|
RU2050677C1 |

Использование: в приводах транспортно-согласующих и робототехнических устройств поступательного перемещения. Сущность: линейный электропривод содержит индуктор, вторичный элемент и обмотку управления, слой управления, выполненный в виде полой диэлектрической оболочки, заполненный магнитной жидкостью. Частично слой управления и охватывающая его обмотка управления размещены вне рабочей зоны индуктора. При работе электропривода часть магнитного потока индуктора взаимодействует с вторичным элементом, создавая тяговое усилие, при этом часть потока шунтируется магнитной жидкостью в оболочке, не участвуя в создании тягового усилия. Изменить уровень магнитной жидкости можно воздействием на нее магнитного поля тока обмотки управления. Такое выполнение слоя управления обеспечивает полное использование установленной мощности индуктора и расширяет диапазон регулирования тягового усилия. 2 з.п.ф-лы, 3 ил.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Линейный асинхронный двигатель | 1980 |
|
SU917271A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
