Изобретение относится к электротехнике.
Известен линейный электропривод, содержащий индуктор и вторичный элемент, разделенные зазором [1]
Недостатки аналога обусловлены наличием сложных и дорогих силовых полупроводниковых преобразователей, необходимых для регулирования тягового усилия привода в широких пределах.
Известен также линейный электропривод, принятый в качестве прототипа, в котором кроме индуктора и вторичного элемента имеются ферромагнитный слой управления, размещенный между индуктором и вторичным элементом, а также обмотка управления этим слоем, расположенная на зубчатых полюсных наконечниках [2]
Тяговое усилие привода наибольшее Fmax, когда магнитная проницаемость слоя управления минимальна (μсу μо), и минимально Fmin= 0, когда магнитная проницаемость максимальна ( μсу ∞ ).
Недостатки прототипа связаны с ограниченным диапазоном регулирования тягового усилия привода. Это обусловлено ограниченным диапазоном изменения магнитной проницаемости слоя управления за счет подмагничивания
Минимальная магнитная проницаемость слоя управления μсу, равная магнитной проницаемости воздуха (μсу μ о), и максимальная μсу ∞ физически недостижимы за счет подмагничивания. Поэтому тяговые усилия привода в этих случаях Flmax < Fmax и Flmin > Fmin за счет подмагничивания изменяются в диапазоне ΔFFlmax Flmin < Fmax 0.
Задача, которую решает изобретение, создание линейного привода с расширенным диапазоном регулирования тягового усилия.
Сущность изобретения заключается в том, что линейный электропривод, содержащий зубчатый индуктор, вторичный элемент и обмотку управления ферромагнитным слоем управления в рабочем зазоре, размещенную на зубчатых полюсных наконечниках, снабжен дополнительным магнитопроводом, при этом ферромагнитный слой управления в рабочем зазоре выполнен в виде магнитной жидкости в диэлектрической оболочке, размещенной между зубчатым индуктором и вторичным элементом, а зубчатые полюсные наконечники обмотки управления выполнены на дополнительном магнитопроводе охватывающими магнитную жидкость с продольных его торцов, причем оси зубцов полюсных наконечников совпадают с продольными осями зубцов индуктора.
Отличие изобретения от прототипа заключается в том, что ферромагнитный слой управления в рабочем зазоре выполнен в виде магнитной жидкости в диэлектрической оболочке, размещенной меду зубчатым индуктором и вторичным элементом, привод снабжен дополнительным магнитопроводом с обмоткой управления и зубчатыми полюсными наконечниками, охватывающими магнитную жидкость с продольных его торцов, причем оси зубцов полюсных наконечников совпадают с продольными осями зубцов индуктора.
Технический результат, получаемый при осуществлении изобретения, заключается в расширении диапазона регулирования тягового усилия привода.
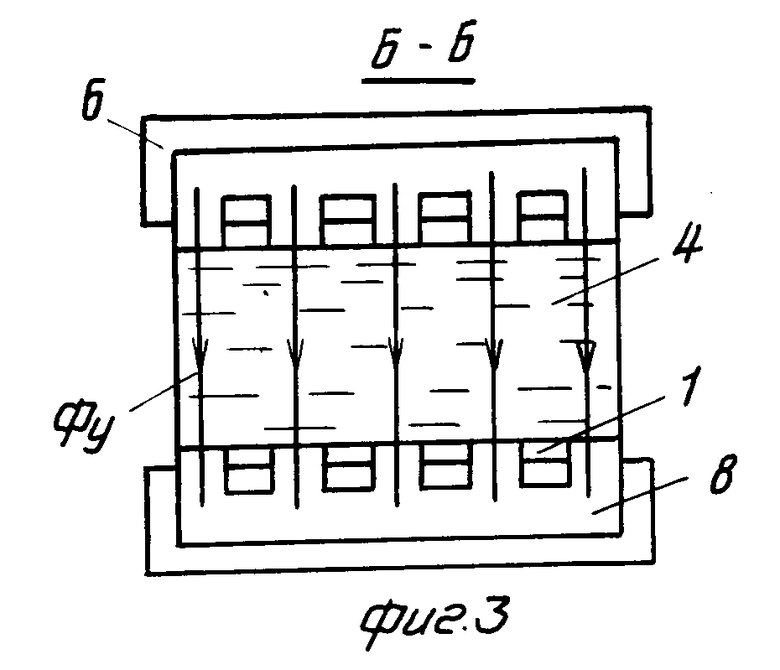
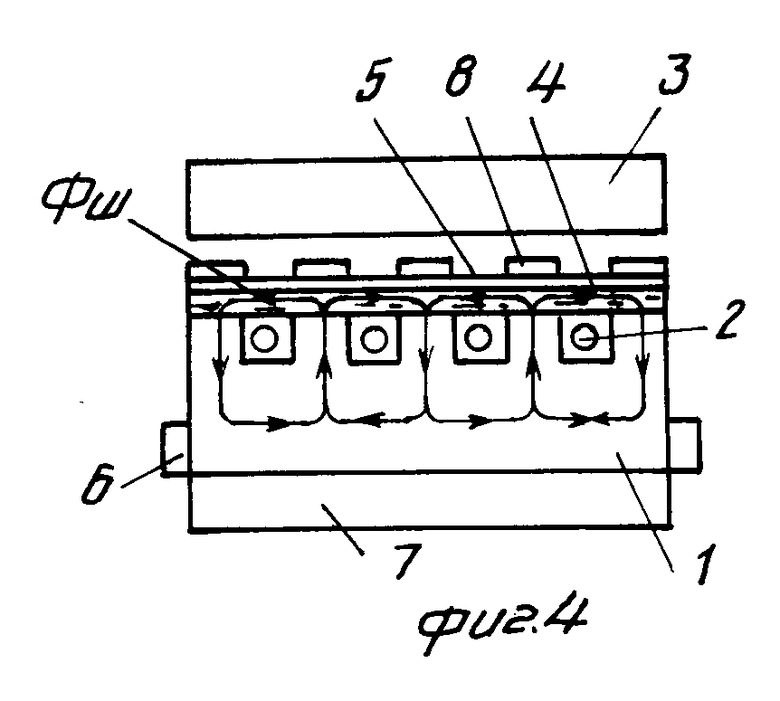
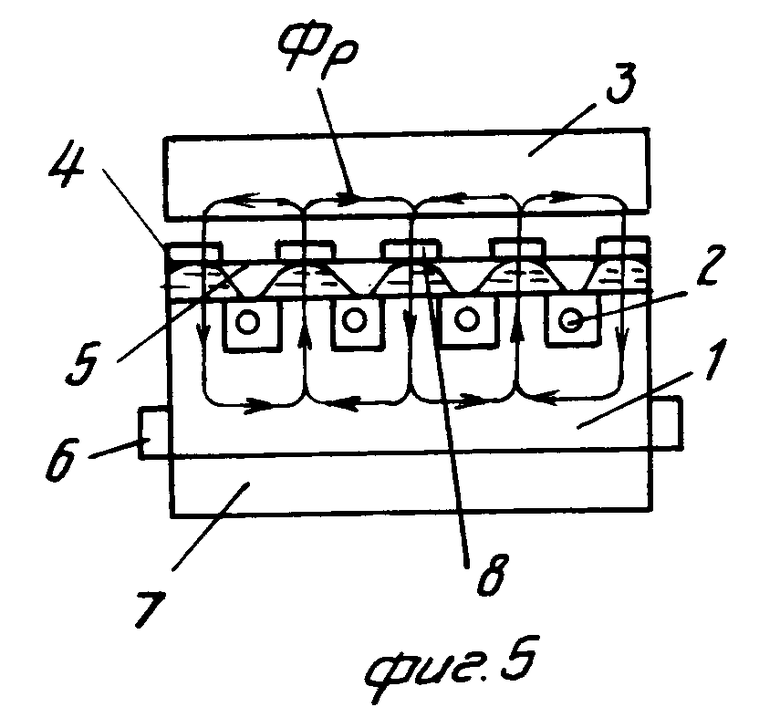
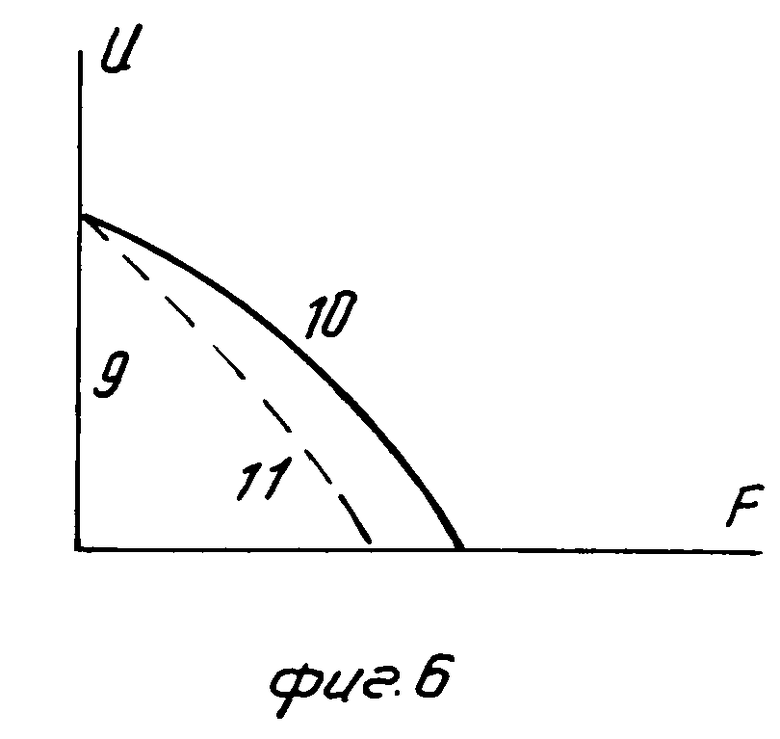
На фиг.1-3 показан линейный электропривод; на фиг.4 и 5 показано распределение магнитной жидкости в диэлектрической оболочке при отсутствии сигнала в обмотке управления и при его максимальном значении; на фиг.6 представлены механические характеристики электропривода, где Φр рабочий поток взаимоиндукции элементов электропривода, Φу магнитный поток обмотки управления,Φш магнитный поток, шунтируемый слоем управления, V и F скорость перемещения и тяговое усилие привода соответственно. Линейный электропривод содержит индуктор 1 с многофазной обмоткой 2 и вторичный элемент 3. Магнитная жидкость 4 находится в диэлектрической оболочке 5.Обмотка 6 управления снабжена магнитопроводом 7 с зубчатыми полюсными наконечниками 8. Оси зубцов полюсных наконечников 8 совпадают с продольными осями индуктора 1.
При работе электропривода на различных режимах формиpуются механические характеристики 9, 10, 11 (фиг.6).
Линейный электропривод с магнитожидкостным управлением работает следующим образом.
При подключении обмотки 2 индуктора 1 к силовой питающей сети (не показана) и отсутствии тока в обмотке 6 управления (Φу 0) уровень магнитной жидкости 4 в оболочке 5 устанавливается одинаковым вдоль всего индуктора, как это показано на фиг.4. При этом в электроприводе имеется лишь магнитный поток Φш (фиг. 4), а рабочий поток взаимоиндукции практически отсутствует ( Φр≈0) и электропривод не развивает тягового усилия (F 0). Механическая характеристика привода, формируемая при этом, имеет вид линии 9 на фиг.6. При наибольшем токе в обмотке 6 управления (Φу увеличивается) магнитная жидкость максимально втягивается в области с наибольшим значением напряженности магнитного поля, создаваемого этой обмоткой, т.е. в области, расположенные по оси зубчатых полюсных наконечников 8. Эти области совпадают с областями зубцов индуктора 1. Таким образом, объемная концентрация (толщина) магнитной жидкости 4 над зубцами и пазами индуктора 1 в пределах зубцовых делений становится различной. Она наибольшая над зубцами индуктора 1, а над пазами минимальна (фиг.5).
Магнитная проводимость магнитной цепи для рабочего магнитного потока взаимоиндукции Φр между индуктором и вторичным элементом 3 и соответственно поток Φр будут наибольшими. Практически весь поток, создаваемый индуктором 1, становится рабочим Φр (фиг.5) Он взаимодействует с вторичным элементом 3 и создает наибольшее тяговое усилие (F Fmax). При этом формируется механическая характеристика 10 (фиг.6).
При сигналах управления, промежуточных между отмеченными предельными значениями, объемная концентрация магнитной жидкости 4 в пределах зубцового деления индуктора 1 непостоянная, имея большее значение над его зубцами. Распределение магнитной жидкости вдоль зубцового деления индуктора будет промежуточными между распределениями, показанными на фиг.4 и 5. При этом часть магнитного потока, создаваемого индуктором 1, шунтируется магнитной жидкостью, образуя магнитный поток Φш, а другая часть образует рабочий поток Φр, проходящий во вторичный элемент 3 и создающий тяговое усилие 0 < F < Fmax. При этом формируется механическая характеристика 11, промежуточная между характеристиками 9 и 10 (фиг.6). Таким образом, изменением тока в обмотке 6 управления обеспечивается перераспределение магнитной жидкости вдоль зубцового деления индуктора, что и приводит к регулированию тягового усилия линейного электропривода.
В предложенном линейном электроприводе изменение магнитных проводимостей для потоков рассеяния и взаимоиндукции осуществляется от минимально возможных до максимальных значений, чем и обеспечивается расширенный по сравнению с прототипом диапазон регулирования тягового усилия привода.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛИНЕЙНЫЙ ЭЛЕКТРОПРИВОД | 1993 |
|
RU2050677C1 |
| ЛИНЕЙНЫЙ ЭЛЕКТРОПРИВОД | 1993 |
|
RU2050676C1 |
| СПОСОБ УПРАВЛЕНИЯ ЛИНЕЙНЫМ ЭЛЕКТРОПРИВОДОМ | 1991 |
|
RU2050674C1 |
| ЛИНЕЙНЫЙ ЭЛЕКТРОПРИВОД | 1991 |
|
RU2024166C1 |
| ЛИНЕЙНЫЙ ЭЛЕКТРОПРИВОД | 1991 |
|
RU2024167C1 |
| УСТРОЙСТВО ЭЛЕКТРОСТАРТЕРНОГО ПУСКА ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 1992 |
|
RU2045680C1 |
| СИСТЕМА ЦЕНТРАЛЬНОГО ВПРЫСКА ГАЗА ДЛЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 1997 |
|
RU2120052C1 |
| КОМБИНИРОВАННАЯ СИСТЕМА ПИТАНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 1994 |
|
RU2085413C1 |
| УСТРОЙСТВО ЭЛЕКТРОСТАРТЕРНОГО ПУСКА ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 1993 |
|
RU2046988C1 |
| УСТРОЙСТВО ЭЛЕКТРОСТАРТЕРНОГО ПУСКА ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 1991 |
|
RU2013640C1 |
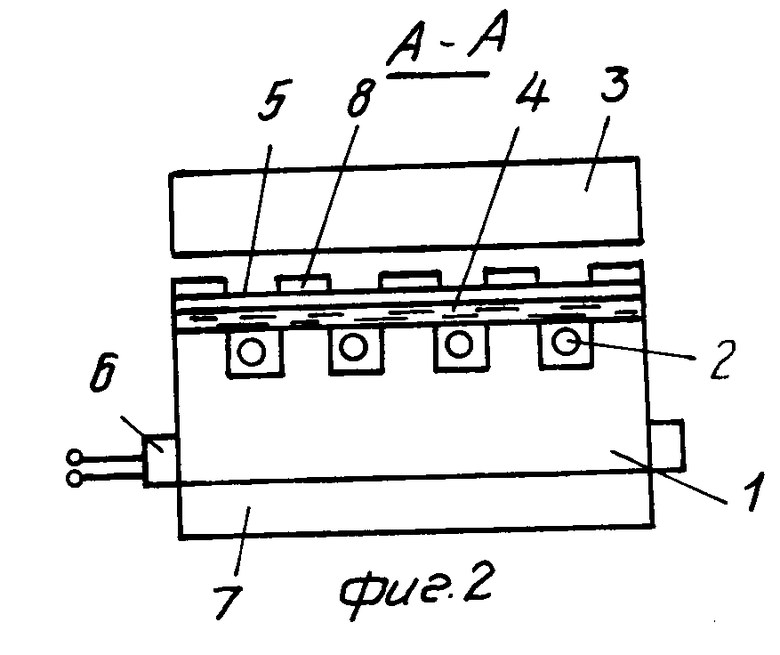
Использование: в приводах широкого назначения, реализующих преобразование электрической энергии в поступательное перемещение. Линейный электропривод содержит индуктор 1, вторичный элемент 3, слой магнитной жидкости 4 между ними в диэлектрической оболочке 5 и обмотку 6 управления, которая размещена вне слоя магнитной жидкости и снабжена дополнительным магнитопроводом 7 с зубчатыми полюсными наконечниками 8, охватывающими слой магнитной жидкости с продольных его торцов, причем оси зубцов полюсных наконечников 8 совпадают с продольными осями зубцов индуктора 1. При работе электропривода рабочая часть магнитного потока индуктора 1 взаимодействует с вторичным элементом 3, создавая тяговое усилие. Другая часть потока шунтируется магнитной жидкостью 4 в оболочке 5, не участвуя в создании тягового усилия. Изменяя объемную концентрацию магнитной жидкости 4 в области полюсных наконечников, что можно осуществить непосредственным воздействием на нее магнитного поля тока обмотки 6 управления, размещенной вне слоя магнитной жидкости 4, можно изменять величину рабочего потока и регулировать, таким образом, величину тягового усилия. 6 ил.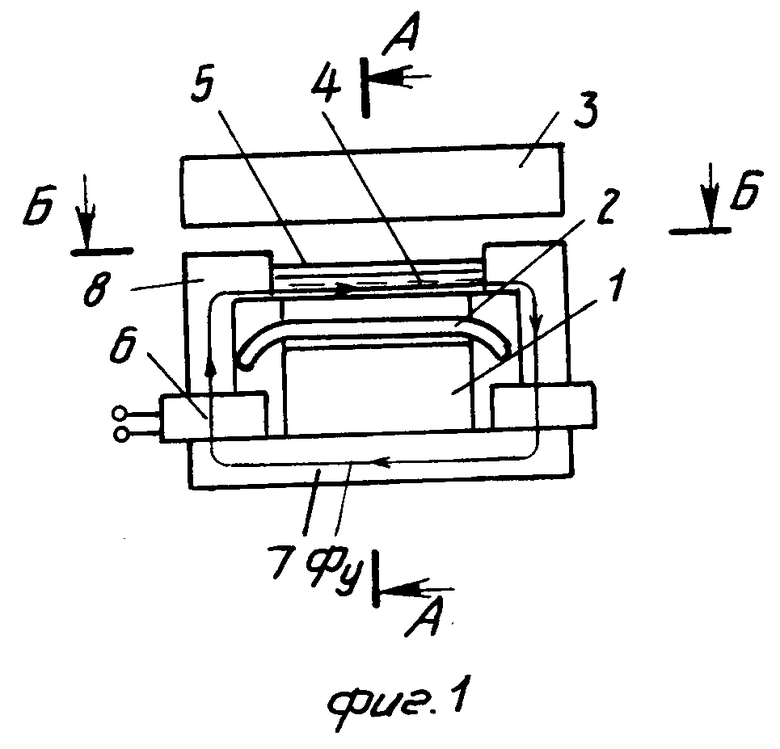
ЛИНЕЙНЫЙ ЭЛЕКТРОПРИВОД, содержащий зубчатый индуктор, вторичный элемент и обмотку управления с ферромагнитным слоем управления в рабочем зазоре, размещенную на зубчатых полюсных наконечниках, отличающийся тем, что он снабжен дополнительным магнитопроводом, ферромагнитный слой управления в рабочем зазоре выполнен в виде магнитной жидкости в диэлектрической оболочке, размещенной между зубчатым индуктором и вторичным элементом, а зубчатые полюсные наконечники обмотки управления выполнены на дополнительном магнитопроводе, охватывающем магнитную жидкость с продольных его торцов, причем оси зубцов полюсных наконечников совпадают с продольными осями зубцов индуктора.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Линейный асинхронный двигатель | 1980 |
|
SU917271A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
