Изобретение относится к тепловизионной технике и может быть использовано в оптико-электронных системах обработки информации и распознавания.
Цель изобретения - уменьшение времени распознавания.
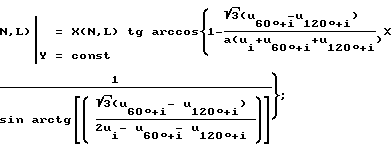
Это достигается тем, что по способу распознавания формы, заключающемуся в сканировании поверхности объекта, преобразовании поляризованного тепловизионного сигнала в электрический с последующим запоминанием и анализом электрического сигнала и формировании поляризационного тепловизионного изображения объекта, непрерывно формируют три кадра поляризационного тепловизионного изображения объекта, каждый элемент которых построен со сдвигом азимута поляризации на угол 60о, а форму объекта определяют по выражениям: c
c s
s 1-
1-  ×
× co
co
 1-
1-  ×
×
где
i(N,L) = (LB+N) ;
;
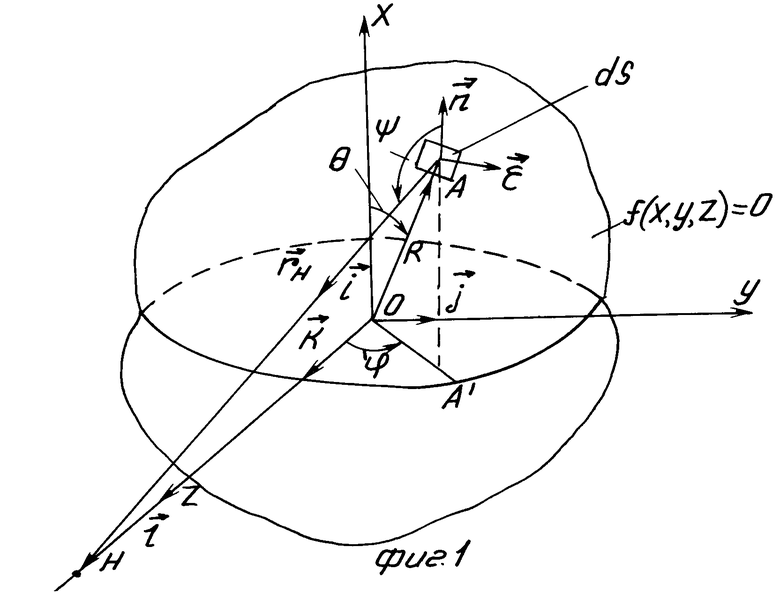
X, Y, Z - декартовы координаты точек поверхности объекта;
N, L - номер строки и элемента строки кадра изображения;
Ui, U60+i, U120+i - величины видеосигналов трех поляризационных тепловизионных изображений с азимутами поляризации соответственно i, 60o+ i, 120o + i;
а - постоянная, характеризующая материал объекта;
А, В - число элементов в строке и число строк в кадре изображения.
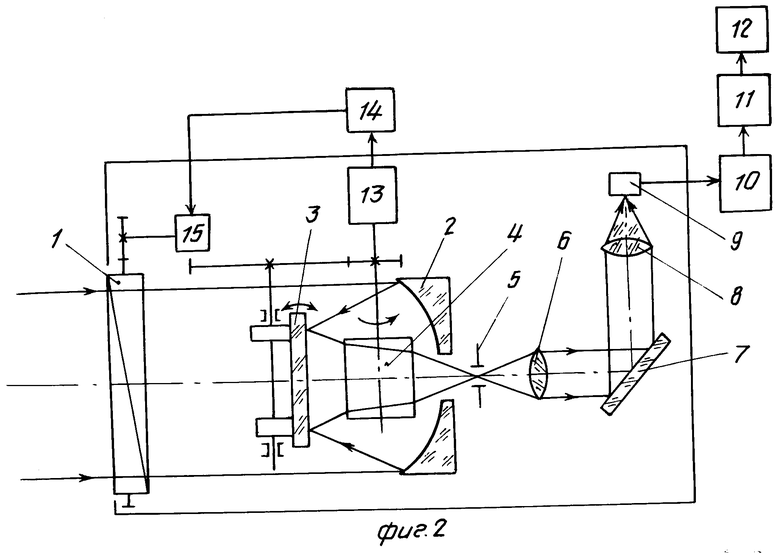
На фиг. 1 изображена производная поверхность в декартовых координатах; на фиг. 2 - функциональная схема устройства для осуществления данного способа.
Устройство состоит из следующих элементов:
вращаемого линейного ИК-поляризатора 1, сферического зеркала со слепым пятном 2, плоского качающегося зеркала кадровой развертки 3, вращающейся призмы строчной развертки 4, диафрагмы 5, расположенной в фокальной плоскости телескопического объектива, состоящего из элементов 2 и 3, окуляра 6, плоского зеркала 7, конденсора 8, приемника теплового излучения 9, запоминающего устройства 10, блока обработки информации 11, видеоконтрольного устройства 12, привода призмы и качающегося зеркала 13, устройства 14 сопряжения вращения призмы и поляризатора и привода поляризатора 15.
Предлагаемый способ выполняется следующим образом.
Собственное ИК-излучение от наблюдаемого объекта проходит через вращающийся поляризатор 1 и отражается от зеркала 2, далее качающееся плоское зеркало 3 осуществляет сканирование поверхности по кадру, а вращающаяся призма 4 - по строке. ИК-излучение от объекта проходит диафрагму 5, окуляр, отражается от зеркала 7, проходит через конденсор 8 и попадает на приемник ИК-излучения 9.
Если при сканировании элемента объекта dS(N,L) угол поворота поляризатора был i, то на выходе приемника формируется сигнал Ui(N,L).
Устройство сопряжения 14 синхронизирует вращение сканирующего механизма 3, 4 и вращение поляризатора 1 таким образом, что за время формирования полного кадра из NxL элементов поляризатор поворачивается на 60о.
Т. о. после сканирования первого кадра происходит сканирование второго кадра, для каждого элемента которого азимут поляризации сдвинут на 60о, т. е. для одного и того же элемента объекта dS(N,L) угол поворота поляризатора 1 будет с i + 60o и на выходе приемника 9 формируется сигнал Ui+60o(N,L).
После сканирования второго кадра происходит сканирование третьего кадра, для каждого элемента которого азимут поляризации сдвинут на 120опо отношению к первому кадру. Для элемента dS(N,L) угол поворота поляризатора 1 будет Ui+120o, а на выходе приемника 9 формируется сигнал Ui+120o(N,L).
В запоминающем устройстве 10 все эти видеосигналы трех кадров запоминаются, а в блоке обработки информации 11 эта информация обрабатывается согласно выражениям (1), а затем на видеоконтрольное устройство 12 выводится форма поверхности наблюдаемого объекта внутри его контура.
Использование: в тепловизионной технике. Сущность изобретения: способ распознавания формы объектов заключается в сканировании поверхности объекта, приеме и обработке теплового излучения объекта, получении и анализе поляризационных тепловизионных изображений. Новым в способе является непрерывное формирование трех поляризационных тепловизионных изображений поверхности объекта для каждого аналогичного элемента, у которых азимут поляризации сдвинут на 60°, что позволяет в реальном масштабе времени определять форму поверхности объекта. Цель изобретения - уменьшение времени тепловизионного распознавания. 2 ил.
СПОСОБ ТЕПЛОВИЗИОННОГО РАСПОЗНАВАНИЯ ФОРМЫ ОБЪЕКТОВ изображений, заключающийся в том, что сканируют поверхности объекта световым потоком, принимают и преобразуют собственный ИК световой поток объекта в поляризованный свет, преобразуют поляризованный тепловизионный сигнал в видеосигнал, запоминают форму по форме сигнала и формируют поляризационное тепловизионное изображение объекта, распознают объект, отличающийся тем, что, с целью уменьшения времени распознавания, поляризацию собственного ИК света осуществляют на 60o непрерывно и последовательно в течение трех кадров, при этом форма объекта определяется выражениями
 (
(
где i(N,L) = (LB + N) · 60o / (AB);
X, Y, Z - декартовы координаты точек поверхности объекта;
N, L - номер строки и элементы строки тепловизионного изображения;
Ui, U60+i, U20+i - величины видеосигналов трех поляризационных тепловизионных изображений с азимутами поляризации соответственно i, 60o+ i, 120o + i;
a - постоянная, зависящая от материала объекта;
A, B - число элементов в строке и число строк в кадре тепловизионного изображения.
| Способ тепловизионного распознавания формы объекта | 1989 |
|
SU1667273A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
