Изобретение относится к гусеничной землеройной машине, снабженной захватным органом, предназначенным для обхватывания столба и крепкого его удержания.
При монтаже телефонных или силовых кабелей используют по существу две разные системы для установки необходимых столбов в грунте. Одна из этих систем известна как система типа "жираф", в которой захватный орган установлен на кабине управления колесного экскаватора через посредство телескопически подвижной рабочей стрелы (ЕР N 0150154, кл. E 02 F 2/96, 1985).
Недостатки этой системы состоят в том, что захватный орган и телескопически подвижная стрела не защищены во время транспортировки, и что из-за местоположения стрелы, несущей захватный орган, на машине трудно управляться посредством этой стрелы с наиболее тяжелыми столбами. Кроме того, колесная землеройная машина имеет ограниченную проходимость, например, когда грунт грязный и мокрый. К тому же роющая способность колесного экскаватора (копателя) не такая большая, как у гусеничного экскаватора, и потому могут возникнуть затруднения при необходимости копания замороженного грунта.
Другая система, используемая для установки столбов, необходимых для монтажа воздушных телефонных и силовых кабелей, включает в себя гусеничную землеройную машину, снабженную ковшом, на котором установлен захватный орган [1].
Наиболее серьезным недостатком этой системы является то, что землеройная и захватная функции соответственно ковша и рабочего органа не могут быть осуществлены одновременно и потому для установки столбов в грунте необходимы двое рабочих. Один рабочий сидит в машине и с помощью захватного органа держит столб в требуемом положении в предварительно выкопанной яме, в то время как другой рабочий заполняет яму грунтом вокруг столба вручную. В попытке уменьшить этот недостаток можно установить на ковше два контейнера для грунта, которые заполняют грунтом, управляя из кабины управления. Когда затем столб будет установлен на место с помощью захватного органа, контейнеры с грунтом перемещают так, чтобы грунт падал в яму, в которой установлен столб. Однако яму полностью не заполняют, и потому необходимость в двух рабочих остается.
Эти недостатки устраняют с помощью гусеничной землеройной машины в соответствии с настоящим изобретением, отличительные признаки которого изложены в отличительной части основного пункта формулы изобретения. Рабочий орган (предпочтительно захватный орган) установлен на телескопическом устройстве, которое во время транспортировки отведено в защитное положение в шасси машины между ее гусеницами. Это уменьшает опасность повреждения рабочего органа. Рабочий орган также может быть легко перемещен в требуемое положение с помощью телескопического устройства, которое приводится в действие для регулировки расстояния между рабочим органом и землеройной машиной, а также с помощью средства поперечного регулирования и средства регулирования по высоте, приводимых в действие для регулирования соответственно поперечных и высотных положений рабочего органа. Таким образом, рабочий орган может быть перемещен независимо от ковша, что обеспечивает возможность одновременного выполнения индивидуальных функций рабочего органа и ковша. Это позволяет выполнять работу по установке столбов, служащих для поддержания воздушных телефонных или силовых кабелей, посредством одного единственного рабочего.
Применение гусеничной машины в соответствии с настоящим изобретением не ограничено массой столбов, господствующими погодными условиями или состоянием грунта (может быть, например, использована на мерзлых грунтах). Способность использования функции ковша и функции рабочего органа одновременно и независимо друг от друга делает машину высокоуниверсальной.
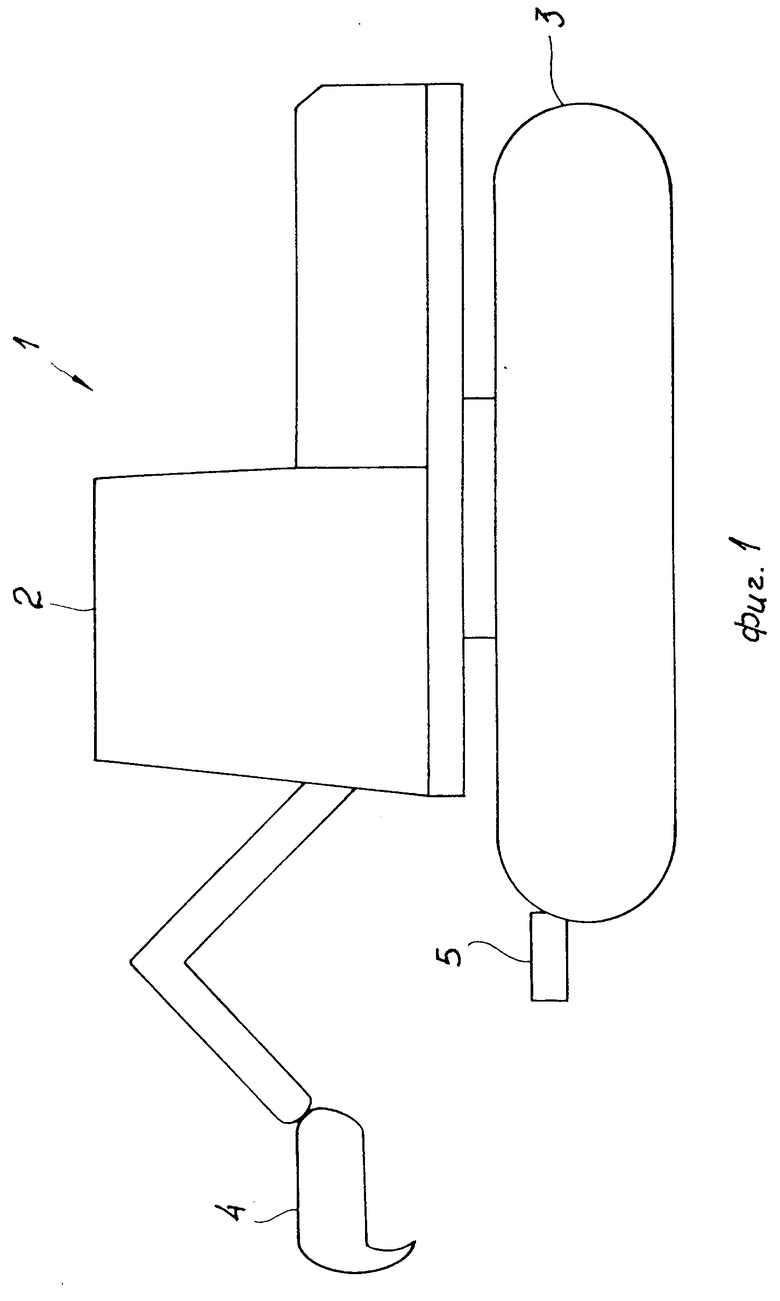
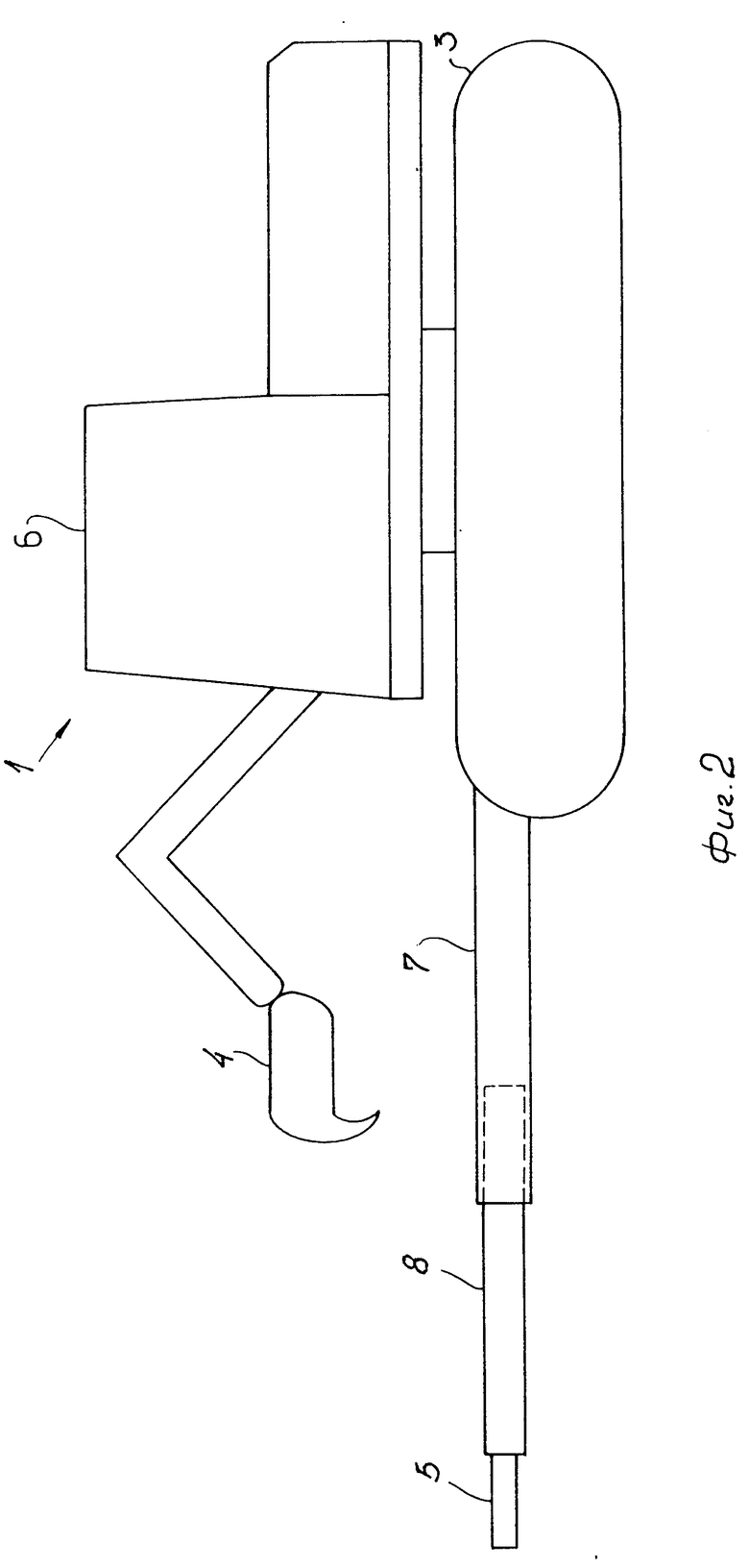
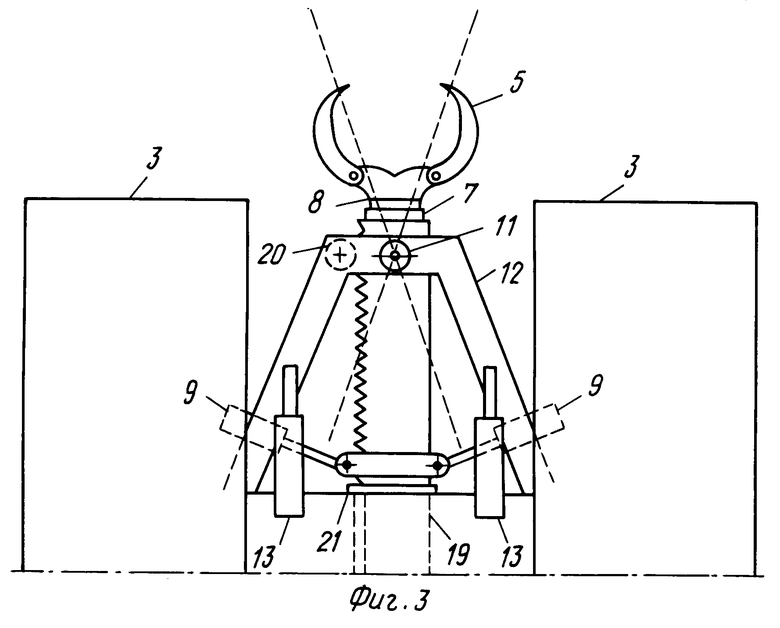
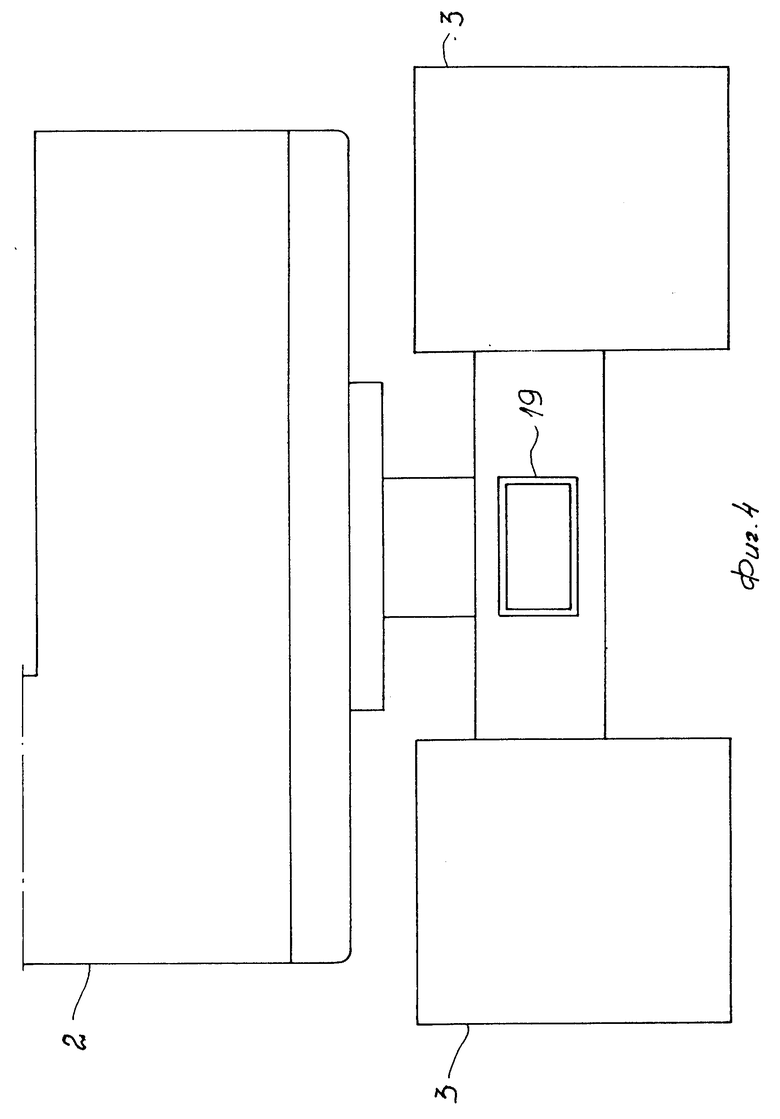
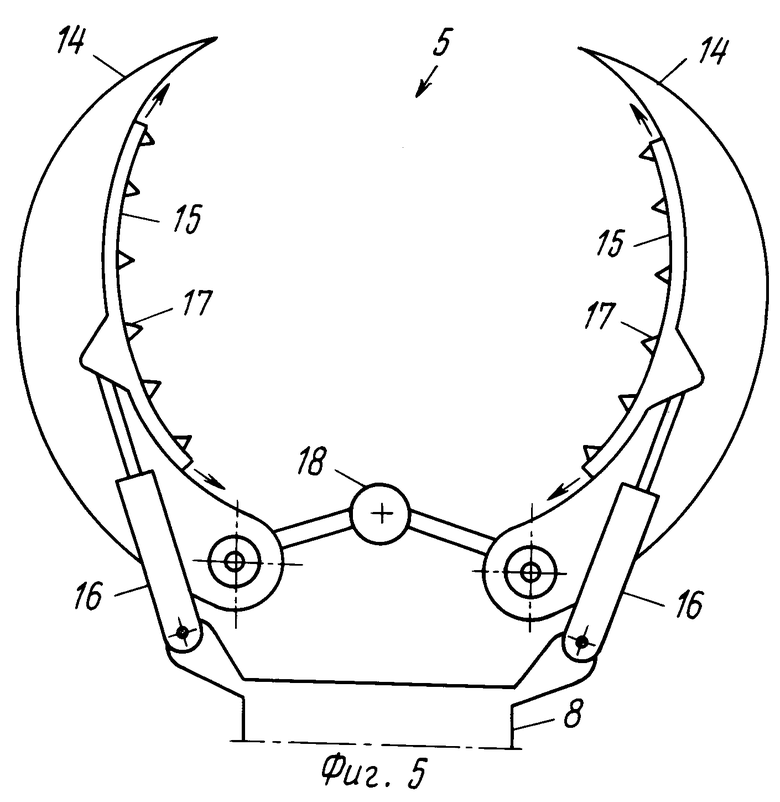
На фиг.1 изображен вид сбоку гусеничной землеройной машины, снабженной телескопическим устройством, которое показано в убранном, защищенном в положении; на фиг.2 -вид сбоку, с телескопическим устройством в выдвинутом, рабочем положении; на фиг.3 - вид сверху приспособления, содержащего захватный орган и телескопическое устройство; на фиг.4 - вид спереди машины в соответствии с изобретением; на фиг.5 - изображение захватного органа для применения в сочетании с землеройной машиной.
Гусеничная землеройная машина 1 состоит из кабины 2 управления, двух гусениц 3, ковша 4 и дополнительного рабочего оборудования, состоящего из захватного органа 5 и телескопического устройства. Захватный орган 5 установлен на телескопическом устройстве (не показано). Телескопическое устройство содержит неподвижную направляющую 6 и подвижные первую часть 7 и вторую часть 8. Первую часть 7 передвигают с помощью привода, который выполнен в виде зубчатой передачи. Вторая часть 8 может быть перемещена только, когда первая часть 7 полностью выдвинута. Выдвижения второй части 8 из первой части 7 осуществляется с помощью гидроцилиндра (не показано). Расстояние между захватным органом 5 и машиной регулируется посредством телескопического устройства.
С помощью двух гидроцилиндров 9, подвижно установленных на шасси, можно регулировать положение захватного органа 5 в поперечном направлении. Поперечное перемещение захватного органа 5 определяется, кроме всего прочего, точкой 11 крепления, которая соединяет раму 12 и неподвижную направляющую 6, причем дополнительное рабочее оборудование может быть повернуто относительно точки 11 крепления. Наружные боковые положения захватного органа 5 показаны пунктирными линиями (фиг.3). Вертикальное (высотное) положение захватного органа 5 регулируется с помощью двух гидроцилиндров 13, подвижно установленных на шасси и раме 12.
Землеройная машина снабжена тремя дополнительными включающими устройствами, например гидравлическими и магнитными клапанами, которые приводят в действие для управления подачей масла в гидроцилиндры для выполнения максимум восьми функций одновременно.
Захватный орган 5 содержит захватывающие челюсти 14, присоединенные к второй подвижной части 8 с возможностью их перемещения между положениями захвата и раскрытия с помощью двух гидроцилиндров (не показано).
Захватный орган 5 содержит также два ползуна 15, установленных на челюстях 14 с возможностью 15 движения, например, на роликовых опорах. Каждый из ползунов 15 перемещают с помощью соответственно гидроцилиндра 16 в направлениях стрелок, показанных на фиг.5. Ползуны также снабжены зубцами 17, обеспечивающими возможность крепкого захвата, например, столба. Столб, захваченный посредством захватного органа 5, можно вращать путем перемещения ползунов 15 с помощью гидроцилиндров 16. Захватный орган 5 содержит также ролик 18 скольжения, установленный между захватными челюстями 14 для облегчения вращения столба.
Гусеничная землеройная машина работает следующим образом.
В транспортном положении дополнительное рабочее оборудование находится в убранном, защищенном положении. В этом защищенном положении первая подвижная часть 7 и вторая подвижная часть 8 телескопического устройства вдвинуты одна в другую, т.е. вторая часть 8 убрана в первую часть 7. Телескопическое устройство размещено в проеме 19 шасси машины 1. При этом защищенном положении дополнительного рабочего оборудования только захватный орган 5 выступает за пределы гусениц 3 машины 1. Когда водитель машины желает использовать захватный орган 5, он посредством зубчатой передачи, приводимой в действие двигателем 20, выдвигает первую подвижную часть 7 в полностью выдвинутое положение, в котором ее запирают с помощью буртика 21. Вторая часть 8 может быть выдвинута только тогда, когда первая часть 7 будет заперта в требуемом положении. Это обеспечивает возможность регулирования расстояния захватного органа от столба. Поворот захватного органа в горизонтальной плоскости и в вертикальной плоскости осуществляют с помощью соответственных гидроцилиндров 9 и гидроцилиндров 13. Таким образом, в результате этой трехмерной регулировки положения захватного органа 5 водитель машины может захватить столб и крепко держать его в предназначенной для него ясе с помощью двух захватывающих челюстей, управляемых гидроцилиндрами. Водитель машины может засыпать яму вокруг столба грунтом с помощью ковша 4. Указанные две функции - захвата и копания могут быть выполнены одновременно и независимо друг от друга, т.к. кабины управления и ковш 4 могут быть повернуты без необходимости перемещения шасси и, следовательно, захватного органа 5.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНЖЕНЕРНАЯ ГУСЕНИЧНАЯ МАШИНА НА БАЗОВОМ ТАНКОВОМ ШАССИ | 2004 |
|
RU2283467C1 |
| ЗЕМЛЕРОЙНАЯ МАШИНА | 1991 |
|
RU2046890C1 |
| ЗЕМЛЕРОЙНО-ТРАНСПОРТНЫЙ АГРЕГАТ ДЛЯ ПОСЛОЙНОЙ РАЗРАБОТКИ КАРЬЕРА | 2005 |
|
RU2284415C1 |
| Рабочее оборудование одноковшового экскаватора | 1989 |
|
SU1707141A1 |
| Землеройная машина | 1987 |
|
SU1511341A1 |
| ТРАНШЕЙНАЯ ГУСЕНИЧНАЯ МАШИНА | 1998 |
|
RU2148126C1 |
| Рабочее оборудование гидравлического бульдозера | 2017 |
|
RU2652781C1 |
| Машина для прокладывания, преимущественно грунтовых колонных путей | 1960 |
|
SU135896A1 |
| ЗЕМЛЕРОЙНАЯ МАШИНА | 2018 |
|
RU2689464C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ОПОВЕЩЕНИЯ | 2016 |
|
RU2720541C2 |
Использование: в гусеничых землеройных машинах с захватным рабочим органом, предназначенным для обхватывания столба и крепкого его удержания. Сущность изобретения: гусеничная землеройная машина содержит шасси, кабину управления, установленную с возможностью поворота относительно шасси, землеройный ковш, дополнительное рабочее оборудование, установленное на шасси. Дополнительное рабочее оборудование состоит из предназначенного для обхватывания столба и крепкого его удержания захватного органа и из соединенного с последним и с машиной телескопического устройства для регулирования расстояния между захватным органом и машиной. Телескопическое устройство выполнено из неподвижной направляющей и двух подвижных частей. Первая подвижная часть перемещается относительно неподвижной направляющей. А вторая часть в транспортном положении полностью вдвигнута в первую и перемещается относительно первой после полного выдвижения первой части. Привод первой части выполнен в виде зубчатой передачи. 4 з.п. ф-лы, 5 ил.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Высокотемпературная испытательная установка для определения деформации жаропрочных материалов | 1960 |
|
SU142455A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |

