Настоящее изобретение относится к способу обеспечения оповещения, в частности, оповещения при прохождении определенного расстояния транспортным средством, в частности, рабочим транспортным средством.
Известные рабочие транспортные средства, в частности, экскаваторы-погрузчики, оснащаются навесным оборудованием, в частности, загрузочным ковшом, установленным на передней части транспортного средства, и другим навесным оборудованием, в частности, обратной лопатой, установленной на задней части транспортного средства. Другие рабочие транспортные средства, например, экскаваторы или погрузчики с телескопической стрелой содержат навесное оборудование, установленное на одном конце транспортного средства.
Известные экскаваторы-погрузчики содержат рычажную систему, которая имеет рычаг, называемый стрелой и установленный с возможностью поворота вокруг, по существу, горизонтальной оси относительно шасси транспортного средства. Другой рычаг, называемый рукоятью, может быть присоединен к концу стрелы, дальнему от шасси, с возможностью поворота вокруг, по существу, горизонтальной оси. Навесное оборудование, в частности, ковш или бур, может быть присоединено с возможностью поворота к концу рукояти. Стрела может подниматься и опускаться посредством первого гидроцилиндра. Рукоять может перемещаться относительно стрелы посредством второго гидроцилиндра. Ковш может перемещаться относительно рукояти посредством третьего гидроцилиндра.
Если оператор хочет переместить транспортное средство, то сиденье поворачивается в переднем направлении, и оператор может пользоваться органами управления, в частности, рулевым колесом, педалью тормоза, педалью сцепления, педалью акселератора, рычагами переднего и заднего хода и коробкой передач, имеющей передние и задние передачи, для обеспечения пеермещения транспортного средства по земле. Если требуется переместить транспортное средство на некоторое расстояние с одного места на другое, то передний загрузочный ковш поднимается над уровнем земли, и транспортное средство может передвигаться как машина (автомобиль), при этом оператор смотрит в направлении движения, и пользуется рулевым колесом и органами управления тормозом, сцеплением и акселератором (т.е., транспортное средство находится в состоянии перемещения).
Если оператор хочет использовать обратную лопату, то транспортное средство переключается в рабочий режим. В этом режиме, сиденье поворачивается назад. При использовании обратной лопаты транспортное средство будет неподвижным, поэтому некоторые или все колеса могут быть подняты от земли посредством опорных ножек, и/или передний загрузочный ковш может быть опущен для упора в грунт. Известные экскаваторы-погрузчики имеют стабилизаторы на задней правой и задней левой сторонах транспортного средства. При этом каждый стабилизатор имеет отдельное управление посредством устройства, управляемого оператором, т.е., предусмотрено одно устройство для управления только правым стабилизатором и другое устройство для управления только левым стабилизатором. Перед началом работы обратной лопатой каждый стабилизатор упирается в грунт.
Для выполнения работы, например, выкапывания траншеи, оператор транспортного средства должен одновременно управлять тремя гидроцилиндрами рычажной системы, что представляет собой сложный процесс. Умелый оператор при выкапывании траншеи может быстро заполнять ковш материалом, поднимать ковш из траншеи и опорожнять его с одной или другой стороны транспортного средства.
Цикл выкапывания обычно начинается с полностью выдвинутого положения рычажной системы (т.е., стрелы и рукояти), и, поскольку траншея выкапывается в направлении задней части транспортного средства, рычажная система постепенно убирается до тех пор, пока стрела и рукоять не окажутся в полностью убранном положении вблизи задней части транспортного средства. Для продолжения выкапывания траншеи оператору необходимо переместить транспортное средство на некоторое расстояние и установить его в новом положении. Для этого оператору обычно нужно повернуть сиденье в переднее положение и передвинуть транспортное средство на требуемое расстояние (например, равное длине рычажной системы или длине транспортного средства) в следующее положение выкапывания. Оператор обычно определяет необходимое расстояние визуально, концентрируясь на том, чтобы смотреть в направлении, противоположном направлению движения транспортного средства.
Неточная смена положения транспортного средства приводит к тому, что ковш будет находиться слишком далеко от края траншеи, чтобы обеспечить непрерывность выкапываемой траншеи, или ковш окажется на уже выкопанном участке траншеи. Если ковш будет находиться слишком далеко от края траншеи, то оператору придется корректировать положение транспортного средства перед началом следующего цикла выкапывания, что является неэффективной тратой времени. Если ковш окажется на уже выкопанном участке траншеи, то процесс выкапывания станет менее эффективным. Оператор может оставить рычажную систему экскаватора-погрузчика во время перемещения в полностью выдвинутом положении, чтобы точнее определять расстояние; однако это ухудшает устойчивость транспортного средства.
Когда транспортное средство будет в нужном положении, может выполняться следующий цикл выкапывания. Этот процесс повторяется до тех пор, пока не будет достигнута требуемая длина траншеи.
Соответственно, существует потребность в усовершенствованном способе определения расстояния, во время перемещения транспортного средства между рабочими положениями.
Согласно настоящему изобретению обеспечен способ обеспечения оповещения при прохождении транспортным средством определенного расстояния, при этом указанный способ содержит следующие шаги: (a) включение системы оповещения; (b) задание целевого расстояния, подлежащего прохождению транспортным средством; (c) перемещение транспортного средства; (d) сравнение расстояния, пройденного транспортным средством, и целевого расстояния; и (e) обеспечение оповещения на основании сравнения.
Установив целевое расстояние в системе оповещения и обеспечив оповещение на основании сравнения расстояния, фактически пройденного транспортным средством, и целевого расстояния, оператор может точно и эффективно переместить транспортное средство в следующее рабочее положение, например, в следующее положение выкапывания, без необходимости напряженно смотреть в направлении, противоположном направлению движения транспортного средства, а также без необходимости повторного перемещения для обеспечения нужного положения транспортного средства.
На шаге (с) транспортное средство может двигаться в переднем направлении.
Указанное транспортное средство может представлять собой рабочее транспортное средство, например, экскаватор, погрузчик с телескопической стрелой, экскаватор-погрузчик или перегружатель.
Экскаватор содержит стрелу, рукоять и ковш, установленные рядом с кабиной. Указанные стрела, рукоять и ковш установлены на поворотной платформе. Передним направлением для экскаватора является направление, куда обращен оператор, сидящий я кабине.
Погрузчик с телескопической стрелой или телепогрузчик имеет одну телескопическую стрелу, которая выдвигается вперед из транспортного средства. Навесное оборудование, например, ковш, вилочный захват для поддонов или лебедка, может быть установлено на телескопической стреле. Передним направлением для погрузчика с телескопической стрелой является направление, куда обращены навесное оборудование и оператор.
Экскаватор-погрузчик представляет собой рабочую машину или транспортное средство, содержащее лопату, которая установлена на переднем конце машины или транспортного средства, и стрелу, рукоять и ковш (или иное навесное оборудование, например, бур), установленное на заднем конце машины или транспортного средства. Передним направлением экскаватора-погрузчика является направление, куда обращена его лопата.
Шаг включения системы оповещения может содержать регистрацию сигнала о пеерходе рабочего транспортного средства из рабочего состояния в состояние перемещения.
Шаг регистрации сигнала о переходе рабочего транспортного средства из рабочего состояния в состояние перемещения может содержать регистрацию одного или более из следующего: регистрацию того, что сиденье оператора рабочего транспортного средства переместилось из заднего в переднее положение, и/или регистрацию того, что контактирующий с грунтом элемент рабочей машины переместился из положения контакта с грунтом в поднятое положение, и/или регистрацию того, что выбрано направление движения транспортного средства; и/или регистрацию того, что машина находится в движении; и/или регистрацию того, что рабочий конец машины приведен в действие или деактивирован.
Контактирующий с грунтом элемент может представлять собой стабилизатор, бульдозерный отвал или лопату.
Шаг включения системы оповещения может содержать задание начального положения.
Шаг задания целевого расстояния, подлежащего прохождению транспортным средством, может содержать ввод целевого расстояния в систему оповещения.
Шаг задания целевого расстояния, подлежащего прохождению транспортным средством, может содержать включение системы оповещения в первом положении, перемещение транспортного средства во второе положение, и задание расстояния, пройденного между первым положением и вторым положением, в качестве целевого расстояния.
Целевое расстояние может составлять менее 100 метров, например - менее 50 метров, например - менее 10 метров.
В процессе работы транспортное средство может быть перемещено на определенное расстояние из первого положения во второе положение. Транспортное средство может быть также перемещено на определенное расстояние из второго положения в третье положение, при этом третье положение удалено от второго положения на целевое расстояние. Транспортное средство может быть далее перемещено на определенное расстояние из третьего положения в четвертое положение, при этом четвертое положение удалено от третьего положение на целевое расстояние.
Транспортное средство может содержать рычаг, имеющий полностью выдвинутое положение и полностью убранное положение, при этом целевое расстояние может быть равным или меньшим, чем длина перемещения рычага между полностью убранным положением и полностью выдвинутым положением. Рычаг может быть прикреплен к задней части транспортного средства. Альтернативно, рычаг может быть прикреплен к передней части транспортного средства.
Указанное оповещение может включать в себя оповещающий сигнал, например, звуковой, визуальный или вибрационный оповещающий сигнал.
Оповещающий сигнал может иметь частоту, которая возрастает по мере уменьшения разности между расстоянием, пройденным транспортным средством, и целевым расстоянием.
Оповещающий сигнал может стать непрерывным, если расстояние, пройденное транспортным средством, равно целевому расстоянию.
Указанный способ может содержать шаг калибровки расстояния, проходимого транспортным средством, относительно эталонного расстояния.
Шаг калибровки расстояния, проходимого транспортным средством, может содержать одно или более из следующего: измерение известного расстояния; установка первого указателя на первом конце известного расстояния; установка второго указателя на втором конце известного расстояния; перемещение транспортного средства от первого указателя ко второму указателю или от второго указателя к первому указателю; и задание расстояния, пройденного между первым и вторым указателями в качестве эталонного расстояния.
Для расчета расстояния, проходимого транспортным средством, может быть использован определенный алгоритм.
Для определения расстояния, проходимого транспортным средством, может быть также использована глобальная система позиционирования.
Способ может также содержать шаг активации системы оповещения. Шаг активации системы оповещения может содержать приведение в действие рычага управления, соединенного с контактирующим с грунтом элементом транспортного средства. Шаг активации системы оповещения может содержать приведение в действие управляющего устройства системы оповещения.
Способ может также содержать шаг выключения системы оповещения. Шаг выключения системы оповещения может содержать регистрацию сигнала о том, что транспортное средство перешло из состояния перемещения в рабочее состояние. Шаг регистрации сигнала о переходе транспортного средства из состояния перемещения в рабочее состояние может содержать регистрацию одного или более из следующего: регистрацию перемещения сиденья оператора рабочего транспортного средства из переднего в заднее положение; и/или регистрацию перемещения контактирующего с грунтом элемента рабочей машины из поднятого положения в положение контакта с грунтом; и/или регистрацию того, что транспортного средства находится на нейтральной передаче; и/или регистрацию скорости или петремещения транспортного средства; и/или регистрацию того, что рабочий конец машины приведен в действие или деактивирован.
Способ может также содержать шаг деактивации системы оповещения. Шаг деактивации системы оповещения может содержать приведение в действие рычага управления, соединенного с контактирующим с грунтом элементом транспортного средства. Шаг деактивации системы оповещения может содержать приведение в действие рычага управления, соединенного с рабочим элементом транспортного средства. Шаг деактивации системы оповещения может содержать приведение в действие управляющего устройства системы оповещения.
Согласно другому аспекту изобретения обеспечено транспортное средство, содержащее систему оповещения, предназначенную для оповещения о прохождении транспортным средством определенного расстояния, при этом указанная система оповещения выполнена с возможностью приема данных, относящихся к целевому расстоянию, подлежащему прохождению транспортным средством, и данных, относящихся к расстоянию, пройденному транспортным средством; сравнения расстояния, пройденного транспортным средством, и целевого расстояния и обеспечения оповещения на основании сравнения.
Ниже приведено описание изобретения, только в качестве примера, со ссылками на прилагаемые чертежи, на которых показаны:
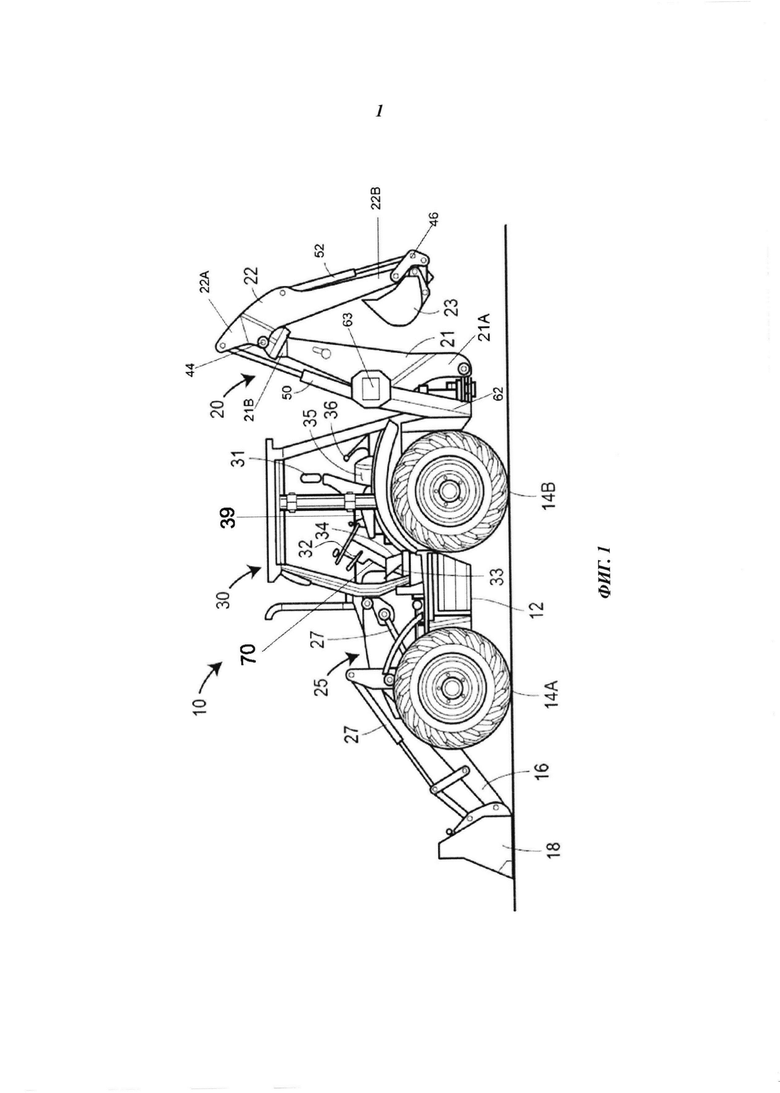
на фиг. 1 - вид сбоку транспортного средства согласно настоящему изобретению;
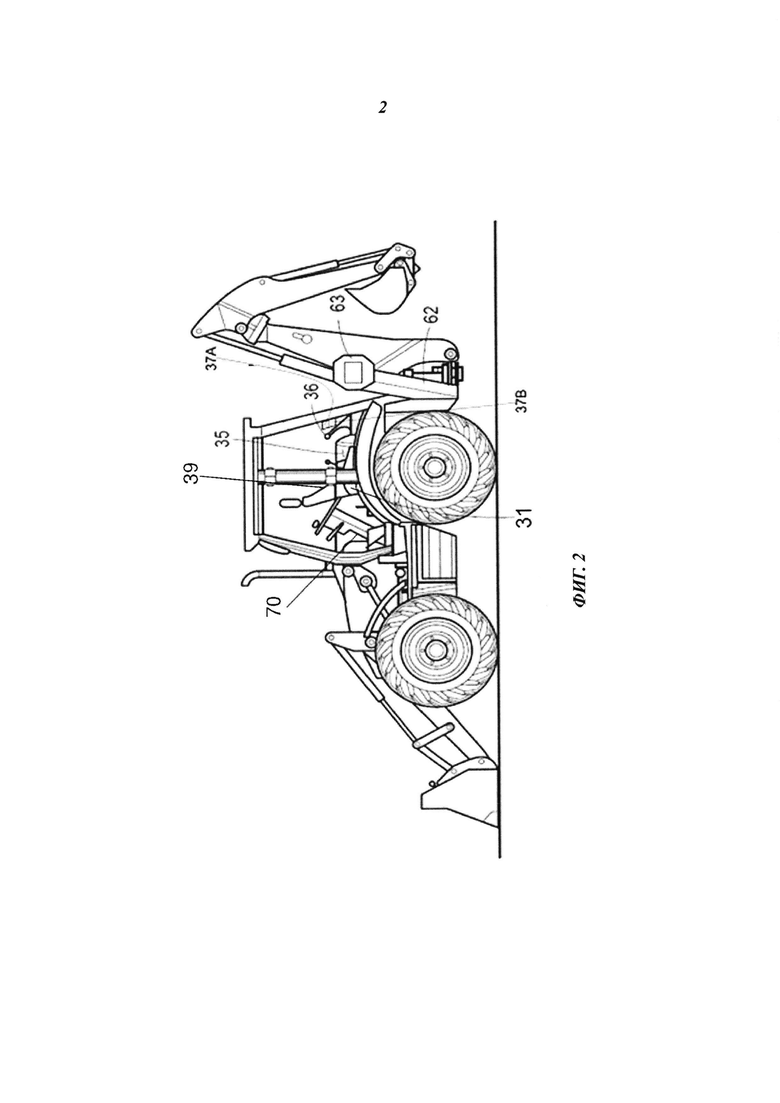
на фиг. 2 - вид сбоку транспортного средства с фиг. 1 с сиденьем оператора, обращенным назад;
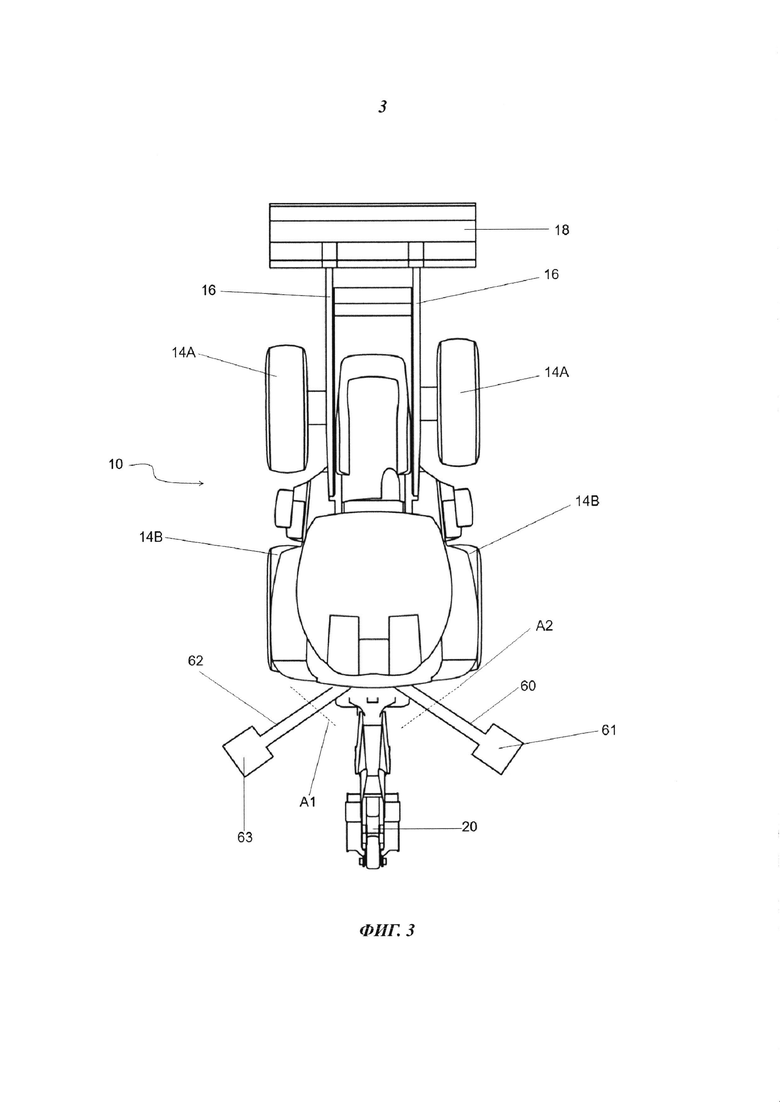
на фиг. 3 - схематический вид сверху транспортного средства с фиг. 1 и 2; и
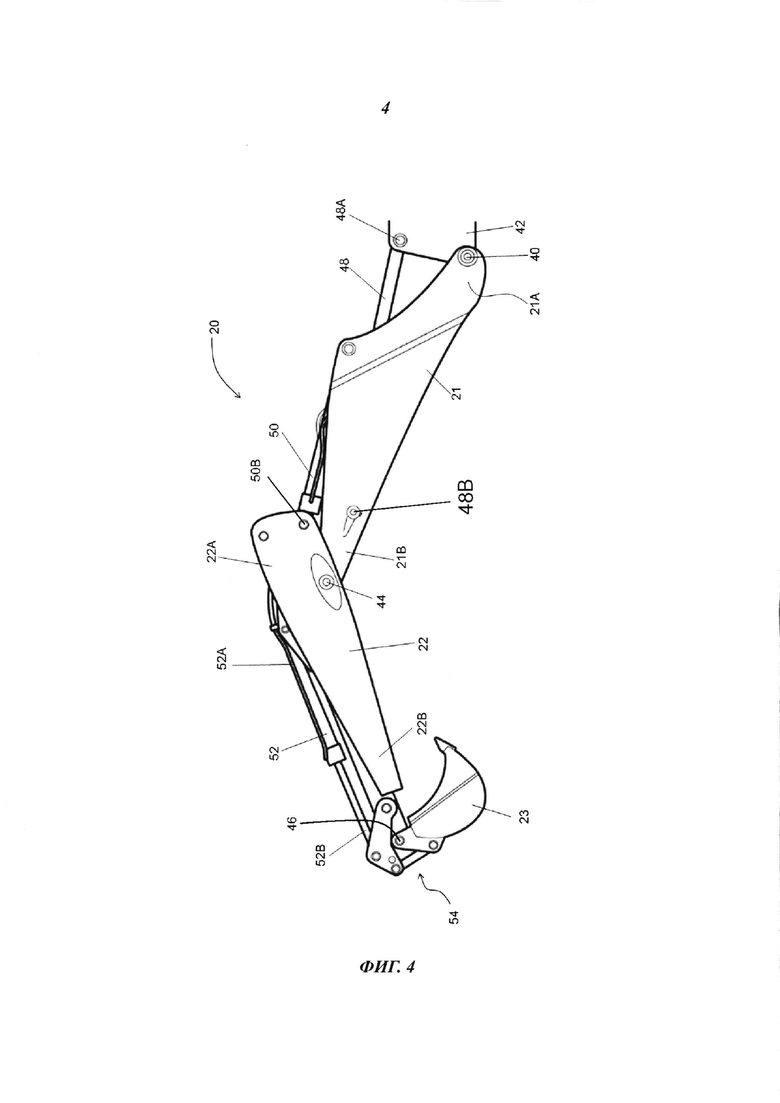
на фиг. 4 - вид сбоку обратной лопаты транспортного средства с фиг. 1 и 2.
На фиг. 1-3 показано рабочее транспортное средство в виде экскаватора-погрузчика 10, имеющего шасси 12, которое опирается на контактирующие с грунтом движущие (или транспортирующие) средства в виде передних колес 14А и задних колес 14В. К шасси 12 прикреплен нагрузочный рычаг 16, на переднем (рабочем) конце которого устанавливается навесное оборудование, в данном случае - загрузочный ковш 18. Нагрузочный рычаг 16 и загрузочный ковш 18 установлены на передней части транспортного средства.
Транспортное средство имеет также задний правый стабилизатор 60 и задний левый стабилизатор 62 (см. фиг. 3). Задний левый стабилизатор 62 присоединен к шасси 12 транспортного средства с возможностью поворота вокруг, по существу, горизонтальной оси А1.
Аналогично, задний правый стабилизатор 60 присоединен к шасси 12 транспортного средства с возможностью поворота вокруг, по существу, горизонтальной оси А2.
На задней части транспортного средства установлена обратная лопата 20, имеющая стрелу 21, рукоять 22 и навесное оборудование для работы с грунтом в виде ковша 23 (см. фиг. 1).
На фиг. 4 показана стрела 21, шарнирно соединенная первым концом 21А посредством оси 40 с серьгой 42. Серьга 42 присоединена к, по существу, вертикальной оси с возможностью поворота относительно рамы транспортного средства. Ось 40 ориентирована горизонтально. Рукоять 22 посредством оси 44 шарнирно соединена со вторым концом 21В стрелы 21. Ось 44 ориентирована горизонтально. Ковш 23 посредством оси 46 шарнирно соединен с концом 22В рукояти 22, противоположным концу 22А рукояти 22. Ось 46 ориентирована горизонтально.
Первый гидравлический привод в виде первого гидроцилиндра 48 имеет первый конец 48А, шарнирно соединенный с серьгой 42, и второй конец 48В, шарнирно соединенный со стрелой 21 между первым и вторым концами стрелы 21. Второй гидравлический привод в виде второго гидроцилиндра 50 имеет первый конец 50А, шарнирно соединенный со стрелой 21 между первым и вторым концами стрелы 21, и второй конец 50В, шарнирно соединенный с рукоятью 22 вблизи первого конца 22А рукояти 22. Третий гидравлический привод в виде третьего гидроцилиндра 52 имеет первый конец 52А, шарнирно соединенный с рукоятью 22 вблизи первого конца 22А рукояти 22, и второй конец 52В, шарнирно соединенный с рычажным механизмом 54 вблизи второго конца 22В рукояти 22. Рычажный механизм 54 сам по себе известен и просто преобразует выдвижение и отвод третьего гидроцилиндра 52 в поворотное движение ковша 23 вокруг оси 46.
Отвод первого гидроцилиндра 48 вызывает подъем стрелы 21, в то время как выдвижение первого гидроцилиндра 48 вызывает опускание стрелы 21. Отвод второго гидроцилиндра 50 заставляет рукоять 22 поворачиваться вокруг оси 44 против часовой стрелки (если смотреть на фиг. 1), т.е., вызывает перемещение рукояти 22 в направлении отвода рукояти, а выдвижение второго гидроцилиндра 50 заставляет рукоять 22 поворачиваться по часовой стрелке (если смотреть на фиг. 1) вокруг оси 44, т.е., в направлении выдвижения рукояти. Отвод третьего гидроцилиндра 52 заставляет ковш 23 поворачиваться против часовой стрелки вокруг оси 46, т.е., в направлении заполнения, в то время как выдвижение третьего гидроцилиндра 52 заставляет ковш 23 поворачиваться по часовой стрелке вокруг оси 46, т.е., в направлении опорожнения.
Первый, второй и третий гидроцилиндры 48, 50, 52 представляют собой гидроцилиндры двойного действия. Гидроцилиндры двойного действия широко известны. Они содержат поршень, установленный в цилиндр. Поршень присоединен к штоку, который выходит за конец цилиндра. Дальний от поршня конец штока образует один конец гидроцилиндра. Дальний от штока конец цилиндра образует противоположный конец гидроцилиндра. Поршневая камера образуется между поршнем и концом цилиндра, дальним от штока. Штоковая камера образуется между поршнем и концом цилиндра, ближним к штоку. Создание давления в поршневой камере вызывает выдвижение гидроцилиндра, в то время как создание давления в штоковой камере вызывает отвод гидроцилиндра.
Транспортное средство содержит двигатель 25, который обеспечивает энергию для движения транспортного средства по грунту. Двигатель 25 обеспечивает также энергию для работы гидравлического насоса, который селективно подает рабочую жидкость под давлением в различные гидроцилиндры 27, 48, 50, 52 транспортного средства для управления нагрузочным рычагом 16, загрузочным ковшом 18, стрелой 21, рукоятью 22, ковшом 23, задним правым стабилизатором 60, задним левым стабилизатором 62 и т.п., чтобы обеспечить выполнение работы с соответствующим материалом.
Транспортное средство содержит кабину 30 оператора, в которой установлено сиденье 31 оператора. Кабина оператора содержит органы управления, в частности, рулевое колесо 32, педаль 33 тормоза, педаль 34 акселератора, манетку 35 управления дроссельной заслонкой, приборную панель 39, рычаги 36 управления обратной лопатой, рычаг 37А управления задним правым стабилизатором и рычаг 37В управления задним левым стабилизатором.
Приведение в действие рычага 37А управления задним правым стабилизатором вызывает приведение в действие гидроцилиндра, соединенного с задним правым стабилизатором (не показан), чтобы повернуть задний правый стабилизатор 60 из убранного положения (как показано на фиг. 1 и 2) в выдвинутое положение (как показано на фиг. 3) так, чтобы подушка 61 контактировала с грунтом. Рычаг 37А управления задним правым стабилизатором имеет фиксатор, при этом перемещение рычага 37А управления задним правым стабилизатором до фиксатора является пропорциональным скорости убирания стабилизатора. Приведение в действие рычага 37А управления задним правым стабилизатором за фиксатором вызывает автоматическое убирание стабилизатора.
Аналогично, приведение в действие рычага 37В управления задним левым стабилизатором вызывает приведение в действие гидроцилиндра, соединенного с задним левым стабилизатором (не показан), чтобы повернуть задний левый стабилизатор 62 из убранного положения (как показано на фиг. 1 и 2) в выдвинутое положение (как показано на фиг. 3) так, чтобы подушка 63 контактировала с грунтом. Рычаг 37В управления задним левым стабилизатором также имеет фиксатор, при этом перемещение рычага 37В управления задним левым стабилизатором до фиксатора является пропорциональным скорости убирания. Приведение в действие рычага 37В управления задним левым стабилизатором за фиксатором вызывает автоматическое убирание стабилизатора.
Как показано на фиг. 1, сиденье 31 оператора обращено в переднем направлении. Сиденье оператора установлено с возможностью поворота и может поворачиваться в положение, показанное на фиг. 2, где оно обращено к задней части транспортного средства.
Транспортное средство содержит также систему 70 оповещения о перемещении.
Система 70 оповещения о перемещении способствует более точному перемещению транспортного средства. Во время движения транспортного средства, система 70 оповещения сравнивает расстояние, проходимое транспортным средством, с заранее заданным целевым (или заранее определенным) расстоянием. Система 70 оповещения генерирует сигнал, частота которого увеличивается пропорционально расстоянию, пройденному транспортным средством. Когда расстояние, пройденное транспортным средством, становится равным заданному целевому расстоянию, сигнал становится непрерывным, чтобы информировать оператора о том, что транспортное средство прошло целевое расстояние.
Приборная панель 39 содержит меню системы оповещения о перемещении для применения при калибровке системы и для ввода задаваемого целевого расстояния, как описано далее. Меню "система оповещения о перемещении" содержит следующие субменю: субменю "калибровка", субменю "целевое расстояние" и субменю "активация".
Далее будут раскрыты калибровка и применение системы 70 оповещения о перемещении.
Калибровка системы 70 оповещения о перемещении
Когда транспортное средство, содержащее систему 70 оповещения о перемещении, выпускается изготовителем, или когда оператор изменяет размер обода или шины, транспортное средство калибруется по фактическому расстоянию до земли. Это требует проведения измерения и разметки известного расстояния на плоской ровной поверхности по прямой линии и расположения транспортного средства на уровне указателя в начале измеренного расстояния. Затем оператор выбирает меню "система оповещения о перемещении" на приборной панели 39 и после этого выбирает субменю "калибровка". По запросу системы оператор выбирает "старт" в субменю "калибровка" и перемещает транспортное средство к указателю, установленному на конце измеренного расстояния. При достижении транспортным средством конечного указателя транспортное средство останавливается, и в субменю "калибровка" выбирается "стоп". По запросу системы оператор выбирает "принять" в субменю "калибровка", чтобы принять новую калибровку системы 70 оповещения о перемещении. Система 70 оповещения о перемещении устанавливает связь между пройденным расстоянием и сигналом от транспортного средства, который является показателем пройденного расстояния, чтобы в будущем измерять пройденные расстояния.
В одном из альтернативных вариантов осуществления калибровка может быть выполнена посредством алгоритма, который позволяет, зная передаточные отношения приводной системы, размер колес и размер шин, рассчитывать фактическое расстояние проходимое транспортным средством и производить автоматическую калибровку. В другом альтернативном варианте осуществления, транспортное средство может быть калибровано посредством глобальной системы позиционирования (GPS), чтобы определять фактическое расстояние, проходимое транспортным средством.
Задание целевого расстояния
Если оператору требуется использовать систему 70 оповещения о перемещении, то необходимо задать целевое расстояние, которое соответствует выполняемой работе, типу транспортного средства и навесному оборудованию, используемому для выполнения работы. Целевое расстояние представляет собой расстояние между первым рабочим положением машины и вторым рабочим положением машины. Целевое расстояние может быть задано, например, таким образом, чтобы оно соответствовало оптимальной длине траншеи, которую можно выкопать без перемещения транспортного средства, или расстоянию между соседними столбами или ямами, которые требуется выкопать на одной прямой. Целевое расстояние может быть задано несколькими способами, примеры которых описаны ниже.
В одном из вариантов осуществления изобретения оператор выбирает субменю "целевое расстояние" в меню "система оповещения о перемещении" на приборной панели 39, выбирает "задать расстояние", а затем вручную вводит величину расстояния в метрах или футах. Целевое расстояние задается выбором "принять" по запросу системы.
Альтернативно, оператор может выбрать субменю "целевое расстояние" в меню "система оповещения о перемещении" на приборной панели 39, затем выбрать опцию "пройти расстояние". Далее оператор может выбрать "старт", переместить транспортное средство на требуемое расстояние, остановить транспортное средство и после этого выбрать "стоп". Целевое расстояние задается выбором "принять" по запросу системы. При использовании этого способа расстояние, пройденное транспортным средством, становится целевым расстоянием.
Активация системы 70 оповещения о перемещении
Система 70 оповещения о перемещении может быть селективно активирована или деактивирована оператором. Система 70 оповещения о перемещении может быть активирована рядом различных способов, примеры которых описаны ниже.
В одном из вариантов осуществления изобретения система 70 оповещения о перемещении активируется оператором путем приведения в действие рычага 37А управления задним правым стабилизатором и рычага 37В управления задним левым стабилизатором и удержания рычагов 37А, 37В в приведенном в действие положении (за фиксатором) в течение некоторого периода времени, например, более 5 секунд.
Альтернативно, оператор может выбрать субменю "активация" в меню "система оповещения о перемещении" на приборной панели 39, а затем выбрать "включить " или "активировать".
Включение системы 70 оповещения о перемещении
Если система 70 оповещения о перемещении активирована, то оператор может привести ее в действие ее одним из следующих способов:
(a) приведение в действие рычага 37А управления задним правым стабилизатором и рычага 37В управления задним левым стабилизатором, обоих, за их фиксаторами, чтобы поднять задний правый стабилизатор 60 и задний левый стабилизатор 62 в полностью убранное положение и отвести подушки 61, 63 от контакта с грунтом; и/или
(b) перемещение сиденья 31 оператора в положение, обращенное в переднем направлении; и/или
(c) выбор направления движения (например, вперед) и перемещение транспортного средства; и/или
(d) регистрация посредством GPS или трансмиссии перемещения транспортного средства.
При таких условиях транспортное средство находится в состоянии перемещения.
Включение активированной системы 70 оповещения о перемещении фиксирует начальное положение и вызывает подачу оповещающего сигнала с низкой частотой. Во время перемещения транспортного средства частота сигнала увеличивается по мере приближения к концу целевого расстояния. Когда пройденное расстояние будет равным целевому расстоянию, сигнал станет непрерывным, чтобы информировать оператора о том, что транспортное средство прошло целевое расстояние.
Оповещение о перемещении
В одном из вариантов осуществления изобретения оповещение представляет собой звуковой оповещающий сигнал, имеющий такую частоту, чтобы периоды звучания сигнала отделялись беззвучными паузами. По мере уменьшения разности между расстоянием, пройденным транспортным средством, и целевым расстоянием частота подачи оповещающего сигнала увеличивается. Когда расстояние, пройденное транспортным средством, будет равным целевому расстоянию, оповещающий сигнал станет непрерывным, чтобы информировать оператора о том, что транспортное средство прошло целевое расстояние.
В альтернативных вариантах осуществления оповещение может представлять собой визуальный оповещающий сигнал, например, проблесковый сигнал, отображаемый в кабине 30 оператора. В этом варианте осуществления частота проблескового сигнала увеличивается по мере уменьшения разности между расстоянием, пройденным транспортным средством, и целевым расстоянием. Когда расстояние, пройденное транспортным средством, будет равным целевому расстоянию, световой сигнал станет непрерывно включенным, чтобы информировать оператора о том, что транспортное средство прошло целевое расстояние. Альтернативно, визуальный сигнал может представлять собой диаграмму из освещенных столбцов, отображаемую на приборной панели транспортного средства, при этом число освещенных столбцов увеличивается или уменьшается по мере приближения расстояния, пройденного транспортным средством, к концу целевого расстояния. Цвет светового сигнала также может изменяться в зависимости от расстояния, пройденного транспортным средством.
Альтернативно, указанный сигнал может представлять собой вибрационный сигнал, частота которого увеличивается по мере уменьшения разности между расстоянием, пройденным транспортным средством, и целевым расстоянием. В этом примере, когда расстояние, пройденное транспортным средством, будет равно целевому расстоянию, вибрационный сигнал станет непрерывным, чтобы информировать оператора о том, что транспортное средство прошло целевое расстояние
Выключение системы 70 оповещения о перемещении
Система оповещения о перемещении может быть выключена одним или более из следующего:
(a) прекращение оператором перемещения транспортного средства; и/или
(b) перевод органа выбора направления перемещения в нейтральное положение или в положение изменения направления; и/или
(c) поворот сиденья 31 оператором в заднем направлении (как показано на фиг. 2); и/или
(d) приведение в действие рычага 37А управления задним правым стабилизатором и/или рычага 37В управления задним левым стабилизатором, чтобы вызвать перемещение одного или обоих из заднего правого стабилизатора 60 и заднего левого стабилизатора 62; и/или
(e) приведение в действие управляющего выключателя или кнопки системы 70 оповещения о перемещении; и/или
(f) приведение в действие органов управления, например, органов управления погрузчиком или экскаватором.
При этих условиях транспортное средство находится в рабочем состоянии.
Система 70 оповещения о перемещении выключается, если расстояние, пройденное транспортным средством, превышает целевое расстояние на величину эталонного расстояния, например, на 1 метр, при этом подача сигнала прекращается.
Система 70 оповещения о перемещении также может быть заблокирована, если оператор изменяет направление перемещения транспортного средства, при этом подача сигнала прекращается.
Деактивация системы 70 оповещения о перемещении
Система 70 оповещения о перемещении может быть деактивирована различными способами, примеры которых описаны ниже.
В одном из вариантов осуществления изобретения система 70 оповещения о перемещении деактивируется оператором путем приведения в действие рычага 37А управления задним правым стабилизатором и рычага 37В управления задним левым стабилизатором, обоих, и удержания рычагов 37А, 37В в приведеном в действие положении (за фиксатором) в течение некоторого периода времени, например, более чем 5 секунд.
Альтернативно, оператор может выбрать субменю "активация" в меню "система оповещения о перемещении" на приборной панели 39, а затем выбрать "выключить" или "деактивировать".
Ниже описаны примеры применения системы 70 оповещения о перемещении.
Пример 1 - выкапывание траншеи
Транспортное средство доставляется на объект.
Оператор останавливает транспортное средство в положении, которое требуется для начала выкапывания траншеи (первое положение) и устанавливает танспортное средство на нейтральную передачу. Затем оператор поворачивает сиденье 31 в заднем направлении (как показано на фиг. 2) и приводит в действие оба рычага - рычаг 37А управления задним правым стабилизатором и рычаг 37В управления задним левым стабилизатором, чтобы получить соответствующее выдвижение заднего правого стабилизатора 60 и заднего левого стабилизатора 62 и обеспечить контакт с грунтом подушек 61, 63.
Далее оператор выкапывает первую часть траншеи, пользуясь рычагами 36 управления обратной лопатой, чтобы перемещать стрелу 21 и рукоять 22 в выдвинутом направлении и, таким образом, перемещать ковш 23 от шасси 12. Затем стрела 21 опускается, чтобы зубья ковша (не показаны) вошли в грунт. После этого ковш 23 немного наклоняется, чтобы зубья ковша могли начать проходить через грунт. Далее производится управление рукоятью 22, стрелой 21 и ковшом 23 таким образом, чтобы перемещать рукоять 22 в направлении отвода, перемещать стрелу 21 в направлении подъема и перемещать ковш в направлении заполнения, при этом зубья ковша перемещаются в направлении шасси 12, обеспечивая заполнение ковша 23 материалом грунта. Когда ковш 23 заполнится, стрела 21 поднимается, обратная лопата 20 поворачивается в боковом направлении относительно транспортного средства, и материал грунта выгружается в результате перемещения ковша 23 в положение разгрузки. Затем указанная последовательность повторяется. Когда ковш 23 возвращается в траншею, он располагается ближе к задней части транспортного средства и является готовым для приема следующей загрузки материала грунта.
После того как траншея будет выкопана вплоть до задней части транспортного средства, и возникнет необходимость перемещения транспортного средства, оператор приводит в действие рычаг 37А управления задним правым стабилизатором и рычаг 37В управления задним левым стабилизатором за их фиксаторами, чтобы обеспечить подъем заднего правого стабилизатора 60 и заднего левого стабилизатора 62 в полностью убранные положения и вывести подушки 61, 63 из контакта с грунтом.
После этого оператор поворачивает сиденье 31 в положение, обращенное в переднем направлении, выбирает субменю "целевое расстояние" в меню "система оповещения о перемещении" на приборной панели 39, а затем выбирает опцию "пройти расстояние". Далее оператор выбирает "старт", выбирает направление движения (например, вперед), перемещает транспортное средство на выбранное расстояние, чтобы обеспечить непрерывное выкапывание траншеи, останавливает транспортное средство (во втором положении) и затем выбирает "стоп". Целевое расстояние (т.е., расстояние между первым положением и вторым положением) задается выбором "принять" по запросу системы.
Оператор устанавливает транспортное средство на нейтральную передачу, возвращает сиденье 31 в положение, обращенное в заднем направлении, и приводит в действие оба рычага - рычаг 37А управления задним правым стабилизатором и рычаг 37В управления задним левым стабилизатором, чтобы опустить каждый из заднего правого стабилизатора 60 и заднего левого стабилизатора 62 на соответствующее расстояние и обеспечить контакт с грунтом обеих подушек 61, 63.
Затем оператор использует рычаги 36 управления обратной лопатой, как раскрыто выше, для выкапывания второй части траншеи.
Когда вторая часть траншеи будет выкопана и потребуется перемещение транспортного средства, оператор приводит в действие рычаг 37А управления задним правым стабилизатором и рычаг 37В управления задним левым стабилизатором за их фиксаторами, чтобы поднять каждый из заднего правого стабилизатора 60 и заднего левого стабилизатора 62 в полностью убранные положения и вывести подушки 61, 63 из контакта с грунтом.
Если система 70 оповещения о перемещении находится в активированном состоянии, то будет подаваться короткий звуковой сигнал.
Если система 70 оповещения о перемещении находится в деактивированном состоянии, то звуковой сигнал будет отсутствовать. Оператор может активировать систему 70 оповещения, используя один из вышеописанных способов.
После приведения в действие системы 70 оповещения оператор поворачивает сиденье 31 в положение, обращенное в переднем направлении, и выбирает направление движения (например, вперед), при этом фиксируется начальное положение, и начинается подача звукового сигнала с низкой частотой. Транспортное средство движется в нормальном режиме, при этом частота звукового сигнала возрастает по мере приближения к концу целевого расстояния. Когда пройденное расстояние станет равным целевому расстоянию (т.е., когда оператор достигнет третьего положения), звуковой сигнал станет непрерывным.
Оператор останавливает транспортное средство в положении, которое требуется для выкапывания третьей части траншеи, устанавливает транспортное средство на нейтральную передачу, возвращает сиденье 31 в положение, обращенное в заднем направлении, и приводит в действие оба рычага - рычаг 37А управления задним правым стабилизатором и рычаг 37В управления задним левым стабилизатором, чтобы опустить задний правый стабилизатор 60 и задний левый стабилизатор 62 на соответствующее расстояние в выдвинутое положение и обеспечить контакт с грунтом подушек 61, 63.
Затем оператор использует рычаги 36 управления обратной лопатой, как раскрыто выше, для выкапывания третьей части траншеи.
Данный процесс повторяется, и транспортное средство перемещается в последовательные положения, которые отделены друг от друга целевым расстоянием, до тех пор, пока не будет выкопана траншея требуемой длины.
Затем оператор приводит в действие оба рычага - рычаг 37А управления задним правым стабилизатором и рычаг 37В управления задним левым стабилизатором, за их фиксаторами, чтобы поднять задний правый стабилизатор 60 и задний левый стабилизатор 62 в полностью убранные положения и вывести подушки 61, 63 из контакта с грунтом. После этого оператор поворачивает сиденье 31 в положение, обращенное в переднем направлении, и выбирает направление движения (например, вперед).
Оператор может деактивировать систему 70 оповещения о перемещении либо путем приведения в действие рычага 37А управления задним правым стабилизатором и рычага 37В управления задним левым стабилизатором, обоих, и удержания рычагов 37А, 37В в приведенном в действие положении (за фиксатором) в течение некоторого периода времени, например, более 5 секунд, либо посредством выбора субменю "активация" в меню "система оповещения о перемещении" на приборной панели 39 и выбора опции "выключить" или "деактивировать".
Альтернативно, оператор может перемещать транспортное средство, как обычно (с системой 70 оповещения, подающей оповещающий сигнал). Поскольку перемещение транспортного средства превышает целевое расстояние на величину, большую, чем эталонное расстояние, например, на 1 метр, система 70 оповещения будет выключена. В этом состоянии во время движения транспортного средства сигналы не будут подаваться, однако, система 70 оповещения будет активной и готовой для последующего применения.
Пример 2 - бурение ям для установки телеграфных столбов
Транспортное средство доставляется на объект. Оператор останавливает транспортное средство в положении, которое требуется для установки первого телеграфного столба (первое положение) и устанавливает транспортное средство на нейтральную передачу.
Оператор выбирает субменю "целевое расстояние" в меню "система оповещения о перемещении" на приборной панели 39, затем выбирает опцию "задать расстояние" и после этого вручную вводит расстояние в метрах или футах. Целевое расстояние задается выбором "принять" по запросу системы.
Далее оператор поворачивает сиденье 31 в положение, обращенное в заднем направлении, (как показано на фиг. 2). Оператор приводит в действие оба рычага - рычаг 37А управления задним правым стабилизатором и рычаг 37В управления задним левым стабилизатором, чтобы опустить задний правый стабилизатор 60 и задний левый стабилизатор 62 на определенную высоту и обеспечить контакт с грунтом подушек 61, 63.
Затем оператор производит бурение первой ямы.
После этого оператор приводит в действие рычаг 37А управления задним правым стабилизатором и рычаг 37В управления задним левым стабилизатором за их фиксаторами, чтобы поднять задний правый стабилизатор 60 и задний левый стабилизатор 62 в полностью убранные положения и отвести подушки 61, 63 от контакта с грунтом.
Если система 70 оповещения о перемещении находится в активированном состоянии, то подается короткий звуковой сигнал.
Если система 70 оповещения о перемещении находится в деактивированном состоянии, то звуковой сигнал будет отсутствовать. Оператор может активировать систему 70 оповещения, как описано выше.
Далее оператор поворачивает сиденье 31 в положение, обращенное в переднем направлении, (как показано на фиг. 1). После приведения в действие системы 70 оповещения оператор выбирает направление движения (например, вперед), при этом фиксируется начальное положение, и начинается подача звукового сигнала с низкой частотой. Транспортное средство перемещается в нормальном режиме, при этом частота звуковых сигналов увеличивается по мере приближения конца целевого расстояния. Когда пройденное расстояние будет равно целевому расстоянию, сигнал становится непрерывным.
Оператор останавливает транспортное средство в положении, которое требуется для бурения второй ямы (второе положение), устанавливает транспортное средство на нейтральную передачу, поворачивает сиденье 31 в положение, обращенное в заднем направлении, и приводит в действовие оба рычага - рычаг 37А управления задним правым стабилизатором и рычаг 37В управления задним левым стабилизатором, чтобы опустить задний правый стабилизатор 60 и задний левый стабилизатор 62 на соответствующую высоту и обеспечить упор в грунт подушек 61, 63.
Далее оператор использует бур, чтобы получить яму для второго телеграфного столба.
Процесс повторяется до тех пор, пока не будет произведено бурение требуемого количества ям. В каждом случае транспортное средство перемещается по последовательным положениям, которые отделены друг от друга целевым расстоянием.
Затем оператор поворачивает сиденье 31 в положение, обращенное в переднем направлении, и активирует оба рычага - рычаг 37А управления задним правым стабилизатором и рычаг 37В управления задним левым стабилизатором, за их фиксаторами, чтобы поднять задний правый стабилизатор 60 и задний левый стабилизатор 62 в полностью убранные положения и отвести подушки 61, 63 от контакта с грунтом. Оператор выбирает направление движения (например, вперед) и отводит транспортное средство от ям.
Оператор может деактивировать систему 70 оповещения о перемещении или путем приведения в действие обоих рычагов - рычага 37А управления задним правым стабилизатором и рычага 37В управления задним левым стабилизатором, и удержания рычагов 37А, 37В в приведенном в действие положении (за фиксатором) в течение некоторого периода времени, например, более 5 секунд, или путем выбора субменю "активация" в меню "система оповещения о перемещении" на приборной панели 39 и выбора опции "выключить" или "деактивировать".
Альтернативно, оператор может перемещать транспортное средство в нормальном режиме (с подачей оповещающего сигнала системой 70 оповещения). Если транспортное средство проходит далее, чем целевое расстояние на величину, превышающую эталонное расстояние, например, на 1 метр, система 70 оповещения будет выключена. В этом состоянии во время движения транспортного средства звуковой сигнал не подается, однако, система 70 оповещения является активной и готовой для последующего применения.
В приведенных выше примерах система 70 оповещения используется в транспортных средствах, которые применяются для выкапывания траншеи и бурения ям для телеграфных столбов. Однако следует понимать, что в альтернативных вариантах осуществления транспортное средство может быть использовано для перемещения решеток или столбов ограждения для установки на определенных пространствах или расстояниях вдоль дороги или маршрута движения или для какой-либо иной цели, где полезно знать расстояние, проходимое транспортным средством, по сравнению с целевым расстоянием.
В вышеописанных вариантах осуществления система 70 оповещения о перемещении может быть активирована и деактивирована, а также включена и выключена посредством рычага управления задним правым стабилизатором и рычага управления задним левым стабилизатором. Однако следует понимать, что в альтернативных вариантах осуществления изобретения могут быть использованы другие рычаги управления, соединенные с другими элементами транспортного средства, контактирующими с грунтом, например, рычаг управления отвалом, для активации и/или деактивации и/или включения и/или выключения системы оповещения, или может быть использован орган управления погрузчиком, поскольку лопата будет нагружать и выгружать грунт во время перемещения транспортного средства.
Система 70 оповещения о перемещении может быть активирована и/или деактивирована и/или включена и/или выключена одним или более из следующего:
1) перемещение контактирующей с грунтом части транспортного средства, например, одного или обоих стабилизаторов и/или отвала и/или лопаты; и/или
2) выбор органа управления элементом машины, контактирующим с грунтом, например, регулятора автоматического подъема стабилизатора и/или включение выключателя погрузчика и/или управляющего органа погрузчика; и/или
3) поворот или изменение положения сиденья оператора; и/или
4) деактивация органов управления экскаватора или погрузчика; и/или
5) выбор регулятора привода или направления; и/или
6) регистрация перемещения транспортного средства посредством GPA или датчика скорости; и/или
7) выбор или отмена выбора органа управления стояночным тормозом; и/или
8) выбор или отмена выбора органа управления погрузчиком; и/или
9) перемещение рабочего конца транспортного средства, например, экскаватора или погрузчика; и/или
10) выбор или отмена выбора выключателя или кнопки подачи оповещающего сигнала о перемещении; и/или
11) изменение режима работы транспортного средства, например, переход из рабочего состояния в состояние перемещения, например, посредством приведения в действие переключателя режима.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОЙ ОРИЕНТАЦИИ ПОГРУЗОЧНО-РАЗГРУЗОЧНОГО ТРАНСПОРТНОГО СРЕДСТВА ПОД ТРЕБУЕМЫМ УГЛОМ (ВАРИАНТЫ) | 2015 |
|
RU2684818C2 |
| СПОСОБ УПРАВЛЕНИЯ МАШИНОЙ ДЛЯ ПЕРЕМЕЩЕНИЯ МАТЕРИАЛОВ | 2014 |
|
RU2698756C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2014 |
|
RU2673497C2 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ И ПОГРУЗКИ И РАЗГРУЗКИ МАТЕРИАЛА И СПОСОБ ЕГО ЭКСПЛУАТАЦИИ (ВАРИАНТЫ) | 2003 |
|
RU2365711C2 |
| СПОСОБ УПРАВЛЕНИЯ МАШИНОЙ ДЛЯ ПЕРЕМЕЩЕНИЯ МАТЕРИАЛОВ | 2015 |
|
RU2745144C1 |
| РАБОЧАЯ МАШИНА | 2018 |
|
RU2777889C2 |
| Погрузчик-экскаватор | 1991 |
|
SU1803499A1 |
| Рабочее оборудование фронтального погрузчика | 2023 |
|
RU2823958C1 |
| Устройство для управления рабочей машиной | 2014 |
|
RU2658708C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ОПЕРАТИВНОЙ ИНФОРМАЦИЕЙ ВОДИТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2471246C2 |
Предложен способ оповещения при прохождении транспортным средством определенного расстояния. Включают систему оповещения. Задают целевое расстояние, подлежащее прохождению транспортным средством. Перемещают транспортное средство. Сравнивают расстояние, пройденное транспортным средством, и целевое расстояние. Обеспечивают оповещение на основании сравнения. Предложено также транспортное средство. Достигается улучшенный способ определения расстояния, которое проходит транспортное средство во время репозиционирования. 2 н. и 31 з.п. ф-лы, 4 ил.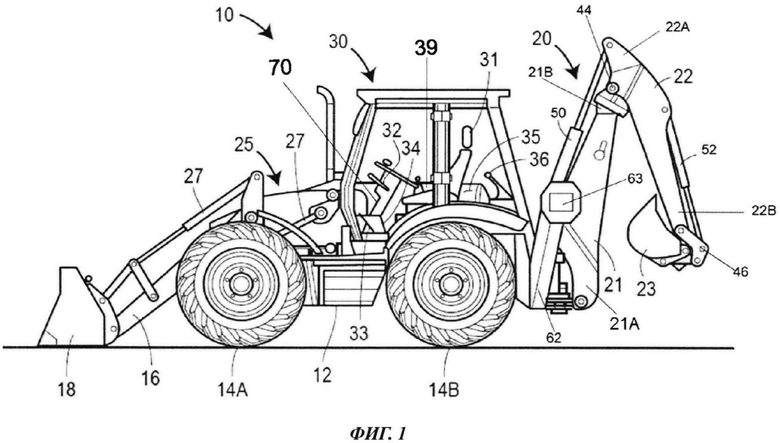
1. Способ оповещения при прохождении транспортным средством определенного расстояния, содержащий следующие шаги:
(а) включение системы оповещения;
(b) задание целевого расстояния, подлежащего прохождению транспортным средством;
(c) перемещение транспортного средства;
(d) сравнение расстояния, пройденного транспортным средством, и целевого расстояния;
(e) обеспечение оповещения на основании сравнения.
2. Способ по п. 1, в котором транспортное средство представляет собой рабочее транспортное средство.
3. Способ по п. 2, в котором рабочее транспортное средство представляет собой экскаватор, или погрузчик с телескопической стрелой, или экскаватор-погрузчик, или перегружатель.
4. Способ по п. 2 или 3, в котором шаг включения системы оповещения содержит регистрацию сигнала о переходе рабочего транспортного средства из рабочего состояния в состояние перемещения.
5. Способ по п. 4, в котором шаг регистрации сигнала о переходе рабочего транспортного средства из рабочего состояния в состояние перемещения содержит:
(i) регистрацию перемещения сиденья оператора рабочего транспортного средства из положения, обращенного в заднем направлении, в положение, обращенное в переднем направлении; и/или
(ii) регистрацию перемещения элемента рабочей машины, контактирующего с грунтом, из положения контакта с грунтом в поднятое положение; и/или
(iii) регистрацию выбора направления движения для транспортного средства; и/или
(iv) регистрацию перемещения машины; и/или
(v) регистрацию того, что рабочий конец машины приведен в действие или деактивирован.
6. Способ по п. 5, в котором элемент, контактирующий с грунтом, представляет собой стабилизатор, или отвал, или лопату.
7. Способ по любому из пп. 1-3, 5, 6, в котором шаг включения системы оповещения содержит задание начального положения.
8. Способ по любому из пп. 1-3, 5, 6, в котором шаг задания целевого расстояния, подлежащего прохождению транспортным средством, содержит ввод целевого расстояния в систему оповещения.
9. Способ по любому из пп. 1-3, 5, 6, в котором шаг задания целевого расстояния, подлежащего прохождению транспортным средством, содержит включение системы оповещения в первом положении, перемещение транспортного средства во второе положение, и задание расстояния, пройденного между первым положением и вторым положением, в качестве целевого расстояния.
10. Способ по любому из пп. 1-3, 5, 6, в котором целевое расстояние составляет менее 100 метров.
11. Способ по п. 10, в котором целевое расстояние составляет менее 50 метров.
12. Способ по п. 11, в котором целевое расстояние составляет менее 10 метров.
13. Способ по п. 8, в котором транспортное средство содержит рычаг, имеющий полностью выдвинутое положение и полностью убранное положение, при этом целевое расстояние равно или меньше длины перемещения рычага между полностью убранным положением и полностью выдвинутым положением.
14. Способ по п. 13, в котором указанный рычаг установлен на задней части транспортного средства.
15. Способ по п. 13, в котором указанный рычаг установлен на передней части транспортного средства.
16. Способ по любому из пп. 1-3, 5, 6, 11-15, в котором оповещение включает в себя оповещающий сигнал, например звуковой, визуальный или вибрационный сигнал.
17. Способ по п. 16, в котором оповещающий сигнал имеет частоту, которая возрастает по мере уменьшения разности между расстоянием, пройденным транспортным средством, и целевым расстоянием.
18. Способ по п. 16, в котором оповещающий сигнал является непрерывным, когда расстояние, пройденное транспортным средством, равно целевому расстоянию.
19. Способ по любому из пп. 1-3, 5, 6, 11-15, 17, 18, дополнительно содержащий шаг калибровки расстояния, проходимого транспортным средством, по эталонному расстоянию.
20. Способ по п. 19, в котором шаг калибровки расстояния, проходимого транспортным средством, содержит:
(a) измерение известного расстояния;
(b) установка первого указателя на первом конце известного расстояния;
(c) установка второго указателя на втором конце известного расстояния;
(d) перемещение транспортного средства от первого указателя ко второму указателю или от второго указателя к первому указателю; и
(e) задание расстояния, пройденного между первым и вторым указателями, в качестве эталонного расстояния.
21. Способ по п. 19, в котором для расчета расстояния, проходимого транспортным средством, используют алгоритм.
22. Способ по п. 19, в котором для определения расстояния, проходимого машиной, используют систему глобального позиционирования.
23. Способ по любому из пп. 1-3, 5, 6, 11-15, 17, 18, 20-22, дополнительно содержащий шаг активации системы оповещения.
24. Способ по п. 23, в котором шаг активации системы оповещения содержит приведение в действие рычага управления соединенного с контактирующим с грунтом элементом транспортного средства.
25. Способ по п. 23, в котором шаг активации системы оповещения содержит приведение в действие управляющего устройства системы оповещения.
26. Способ по любому из пп. 1-3, 5, 6, 11-15, 17, 18, 20-22, 24, 25, дополнительно содержащий шаг выключения системы оповещения.
27. Способ по п. 26, в котором шаг выключения системы оповещения содержит регистрацию сигнала о переходе транспортного средства из состояния перемещения в рабочее состояние.
28. Способ по п. 27, в котором шаг регистрации сигнала о переходе транспортного средства из состояния перемещения в рабочее состояние содержит:
(i) регистрацию того, что сиденье оператора транспортного средства перемещено из положения, обращенного в переднем направлении, в положение, обращенное в заднем направлении; и/или
(iii) регистрацию того, что элемент машины, контактирующий с грунтом, перемещен из поднятого положения в положение контакта с грунтом; и/или
(iii) регистрацию того, что транспортное средство находится на нейтральной передаче; и/или
(iv) регистрацию скорости или перемещения транспортного средства; и/или
(v) регистрацию того, что рабочий конец машины приведен в действие или деактивирован.
29. Способ по любому из пп. 1-3, 5, 6, 11-15, 17, 18, 20-22, 24, 25, 27, 28, дополнительно содержащий шаг деактивации системы оповещения.
30. Способ по п. 29, в котором шаг деактивации системы оповещения содержит приведение в действие рычага управления, соединенного с контактирующим с грунтом элементом транспортного средства.
31. Способ по п. 29, в котором шаг деактивации системы оповещения содержит приведение в действие рычага управления, соединенного с контактирующим с материалом элементом транспортного средства.
32. Способ по п. 29, в котором шаг деактивации системы оповещения содержит приведение в действие управляющего устройства системы оповещения.
33. Транспортное средство, содержащее систему оповещения, предназначенную для обеспечения оповещения при прохождении транспортным средством определенного расстояния, при этом указанная система оповещения выполнена с возможностью приема данных, относящихся к целевому расстоянию, подлежащему прохождению транспортным средством, и данных, относящихся к расстоянию, пройденному транспортным средством; для сравнения расстояния, пройденного транспортным средством, и целевого расстояния и для обеспечения оповещения на основании сравнения.
| Способ копания одноковшовым экскаватором и устройство для его осуществления | 1976 |
|
SU749988A1 |
| DE 102013200274 A1, 10.07.2014 | |||
| US 20110186313 A1, 04.08.2011. | |||

