Изобретение относится к измерительной технике, а именно к определению приведенного момента инерции механизмов и машин, например технологических машин легкой промышленности.
Известны способ определения приведенного момента инерции вращающихся масс и устройство для его осуществления, при котором испытуемые массы приводятся во вращательное от привода движение с заданной скоростью и после этого тормозят их тормозом и замеряют параметры движения с помощью регистратора скорости и торможения. Указанные операции повторяют по крайней мере еще один раз для другого значения скорости и по результатам измерений определяют расчетным путем искомый момент инерции.
Недостаток этого способа и устройства заключается в том, что они не обеспечивают высокой точности определения приведенного момента инерции технологических машин. Это объясняется тем, что эти машины имеют, кроме вращающихся звеньев, много других звеньев, совершающих неравномерные поступательные движения и сложные движения в плоскости, что приводит к переменным значениям угловой скорости звена приведения.
При торможении звена приведения много энергии теряется на тепловыделения в тормозе, закон которых очень сложен и не позволяет учесть изменения угловой скорости звена приведения машины.
Цель изобретения - повышение точности определения момента инерции подвижных звеньев машины.
Это достигается тем, что звено приведения момента инерции машины, например главный вал ее, приводят во вращение до установленной угловой скорости ω1 и после этого его тормозят путем передачи им части кинетической энергии инерционной массе контрольного устройства с известным значением момента инерции I2, одновременно измеряют угловые скорости звена приведения и указанной инерционной массы устройства до достижения ими одинаковой угловой скорости ω2 и по результатам измерения определяют искомый приведенный момент инерции I1 по формуле I1=  (1)
(1)
Кроме того, усторйство для осуществления данного способа, содержащее привод движения звена приведения момента инерции, регистратор угловой скорости и тормоз, дополнительно имеет инерционную массу, например, в виде цилиндра вращения, второй регистратор угловой скорости, например, в виде непрозрачного диска с прорезями, закрепленного жестко с указанной инерционной массой и работающего во взаимосвязи с источником света, фотоэлементом и осциллографом. Звено приведения машины кинематически связано с приводом через обгонную муфту. Инерционная масса устройства в рабочем положении кинематически связана со звеном приведения машины через фрикционную муфту, включающуюся и выключающуюся от переключателя управления.
Предложенный способ торможения звена приведения машины за счет передачи части его кинематической энергии дополнительной инерционной массе устройства, обеспечивает определение на основе закона сохранения момента количества движения приведенного момента инерции по формуле (1).
Способ осуществляют следующим образом.
Звено приведения (в рассматриваемом случае - главный вал швейной машины), к которому приведены все моменты инерции подвижных звеньев машины, обладает приведенным моментом инерции I2 при установленной угловой скорости ω1. Это звено подключают к устройству, имеющему инерционную массу и свой фиксированный приведенный момент инерции I2. Через некоторое время инерционная масса и главный вал машины приобретут общую угловую скорость ω2, после чего можно будет применять формулу (1).
На фиг.1 представлена структурная схема устройства; на фиг.2 - сечение А-А на фиг.1; на фиг.3 - сечение Б-Б на фиг.1.
Устройство содержит инерционную массу 1 в форме цилиндра, посаженную на ось 2, опирающуюся на подшипниковые опоры 3. С инерционной массой 1 жестко связан непрозрачный тонкостенный диск 4 с прорезями 5, с одной стороны которого размещен источник света 6, а с другой - фотоэлемент 7. Со свободного конца оси 2 размещена электромагнитная муфта 8, имеющая полый сердечник 9, скользящей посадкой связанный с концом оси 2. Сердечник 9 подпружинен пружиной 10 и оканчивается фрикционной полумуфтой 11, которая в рабочем положении устройства связана со второй фрикционной полумуфтой 12. Полумуфта 12 закреплена на валу 13, который несет на себе приводный шкив 14 через обгонную муфту 15. Вал 13 закрепляется на главном валу машины-звене приведения момента инерции подвижных звеньев машины через узел крепления 16 (показан условно).
На валу 13 жестко закреплен второй непрозрачный диск 17 с прорезями 18, работающий с источником света 19 и фотоэлементом 20. Диски 4 и 17 с прорезями служат для определения угловой скорости инерционной массы 1 и вала машины. Фрикционные муфты 11 и 12 обеспечивают кинематическую связь инерционной массы 1 устройства и звена приведения, например главного вала испытуемой машины. Переключатель 21 включает и выключает привод машины, а также электромагнитную муфту 8. Приводной шкив 14 вращается от ременной передачи к электродвигателю, который имеет свой тормоз (на чертеже не показан) для торможения его при отключении привода.
Устройство определения приводного момента инерции I1 подвижных звеньев машины работает следующим образом.
Устанавливают на главном валу машины-звене приведения через узел крепления 16 вал 13 устройства; приводят в движение от ременной передачи шкив 14, который через обгонную муфту 15 приводит в движение вал 13 и главный вал испытуемой машины, угловую скорость ω1 которого определяют при анализе осциллограмм по частоте меток от источника света 19 и фотоэлемента 20 на фотобумаге осциллографа. При установившемся режиме машины (который наступает для большинства технологических машин легкой промышленности через 2-5 оборотов главного вала) с помощью переключателя 21 отключают ее от привода и включают электромагнитную муфту 8. При этом главный вал машины вращается от инерции независимо от привода за счет обгонной муфты 15. В это время за счет тормоза электродвигателя привод имеет меньшую угловую скорость. От электромагнитной муфты 8 замыкаются фрикционные муфты 11 и 12, что приводит во вращение инерционную массу 1. Угловая скорость ω2инерционной массы с известным моментом инерции I2, в состав которой входит и масса звеньев 2, 4, 11 также определяется на основе анализа осциллограмм по частоте меток от источника света 6 и фотоэлемента 7 на фотобумаге осциллографа при вращении диска 4 с прорезями 5. При достижении равенства угловых скоростей инерционной массы 1 и главного вала испытуемой машины, т.е. когда их скорость будет иметь максимальное значение ω2(а после этого угловая скорость их будет естественно уменьшаться) искомый момент инерции I1 определяется из закона сохранения момента количества движения по формулам
I1˙ω1=I1˙ω2+I2˙ω2
или
I1(ω1-ω2)=I2˙ω2,
тогда
I1= 
При анализе осциллограмм определяют не только средние значения угловых скоростей ω1 и ω2 , но и их перепады от минимального значения до максимального, что позволяет определить и перепады за кинематический цикл машины приведенного момента инерции I1. Для этого значение инерционной массы 1 устройства должно быть в 5-10 раз меньше общей массы подвижных звеньев испытуемой машины. За нижними пределами этого соотношения инерционная масса 1 становится не чувствительна к перепадам угловой скорости звена приведения испытуемой машины, а за верхним пределом I2 становится слишком незначительным, чтобы надежно фиксировать сохранение момента количество движения.
Таким образом, предложенное устройство позволяет с высокой точностью определить приведенный момент инерции как отдельного механизма, так и машины в целом.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД МАШИНЫ | 1991 |
|
RU2016292C1 |
| ПРИВОД МАШИНЫ | 1996 |
|
RU2115845C1 |
| МНОГООПЕРАЦИОННЫЙ ШВЕЙНЫЙ АГРЕГАТ | 1992 |
|
RU2073758C1 |
| ПРИВОД | 1992 |
|
RU2071576C1 |
| МНОГООПЕРАЦИОННЫЙ ШВЕЙНЫЙ АГРЕГАТ | 1994 |
|
RU2084571C1 |
| ШВЕЙНЫЙ АГРЕГАТ | 1998 |
|
RU2130982C1 |
| ШВЕЙНЫЙ РОБОТИЗИРОВАННЫЙ ТЕХНОЛОГИЧЕСКИЙ КОМПЛЕКС | 1999 |
|
RU2154701C1 |
| УЗЕЛ ЧЕЛНОКА ШВЕЙНОЙ МАШИНЫ С ПРЕРЫВИСТОЙ ПОВЕРХНОСТЬЮ ТРЕНИЯ | 1992 |
|
RU2070239C1 |
| УЗЕЛ ПРИЖИМНОЙ ЛАПКИ МЕХАНИЗМА ПЕРЕМЕЩЕНИЯ МАТЕРИАЛА ШВЕЙНОЙ МАШИНЫ | 1996 |
|
RU2122053C1 |
| СТИРАЛЬНАЯ МАШИНА | 1991 |
|
RU2016943C1 |
Изобретение относится к измерительной технике и предназначено для определения приведенного момента инерции, например, в технологических машинах легкой промышленности. Часть кинематической энергии звеньев машины передается инерционной массе 1 тонконитного устройства, момент инерции подвижных деталей устройства J2 известен, измеряют угловую скорость звена приведения до момента включения контрольного устройства ω1 и угловую скорость его и инерционной массы 1 на момент их равенства ω2. Искомый приведенный момент инерции J1 машины определяют из закона сохранения момента количества движения. Контрольное устройство включает инерционную массу 1, регистраторы угловой скорости машины и инерционной массы 1, фрикционную муфту 8 для включения инерционной массы, средство управления ей в виде переключения 21 и обгонную муфту 15 для соединения привода машины с главным ее валом. 1 з.п. ф-лы, 3 ил.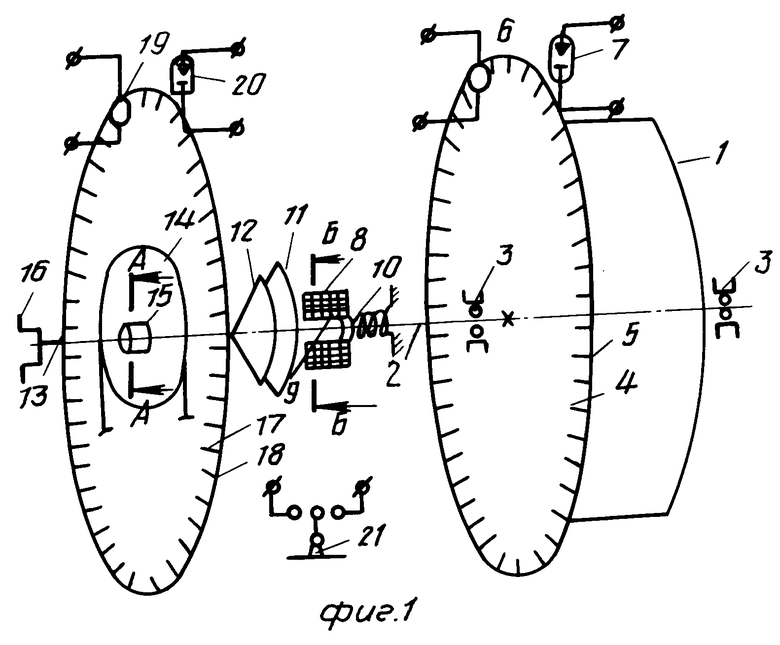
I1=  .
.
| Способ определения приведенного момента инерции вращающихся масс | 1986 |
|
SU1471096A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
