Изобретение относится к измерительной технике, в частности к способам и устройствам для измерения перепадов или разностей давлений в аэродинамическом эксперименте, а также в случаях, когда требуется измерять малые, порядка единиц и десятков Па, перепады давлений, например, при измерении скорости газовых потоков.
Известен способ измерения перепада давления с помощью дифференциального датчика, работающего совместно с усилительно-преобразовательной аппаратурой. Способ осуществляется путем подключения двух пневмовходов дифференциального датчика к соответствующим точкам отбора давления в исследуемой среде, усиления и преобразования выходного сигнала дифференциального датчика [1].
Известно устройство для измерения перепада давления, содержащее дифференциальный датчик с двумя пневмовходами, выход которого связан с индикатором через электронный усилительно-преобразовательный блок. Режим работы дифференциального датчика путем соответствующего выбора схемы включения организуется таким образом, чтобы происходило уменьшение или компенсация температурной погрешности. Например, у индуктивных датчиков при оптимальных по величине омического сопротивления и материалу провода катушек обеспечивают на несущей частоте усилительно-преобразовательной аппаратуры компенсацию мультипликативной погрешности [1].
Однако указанные способ и устройство, несмотря на то, что они расширяют диапазон рабочих температур, не позволяют снизить пороговый уровень измеряемых перепадов давлений из-за наличия аддитивной составляющей температурой погрешности, проявляющей в виде дрейфа показаний.
Целью изобретения является уменьшение аддитивной температурной погрешности и погрешности гистерезиса.
Цель достигается тем, что в способе измерения перепада давления, основанном на подключении двух пневмовходов дифференциального датчика к точкам отбора давления, на усилении и преобразовании выходного сигнала датчика, формируют управляющий сигнал в виде периодической функции времени, один из пневмовходов датчика в процессе измерения периодически синхронно управляющему сигналу поочередно подключают то к первой, то к второй точке отбора давления, а другой пневмовход подключают синхронно с первым входом к другой точке отбора давления. Выходной сигнал датчика после усиления умножают на сформированный управляющий сигнал, а о величине перепада давления судят по значению интеграла от результата умножения сигналов за время цикла измерения.
Цель достигается также тем, что устройство для измерения перепада давления, содержащее дифференциальный датчик с двумя пневовходами и электронно-преобразовательный блок с индикатором, снабжено также двумя двухпозиционными пневмопереключателями, генератором периодического управляющего сигнала, умножителем и интегратором. Пневмовходы датчика соединены с выходами своих пневмопереключателей, входы которых в свою очередь соединены с точками отбора давлений, разность между которыми измеряется. Выход усилительно-преобразовательного блока соединен с первым входом умножителя, второй вход умножителя подключен к выходу генератора периодического управляющего сигнала, другой выход генератора подключен к управляющим входам обоих пневмопереключателей, а выход умножителя через интегратор связан с индикатором.
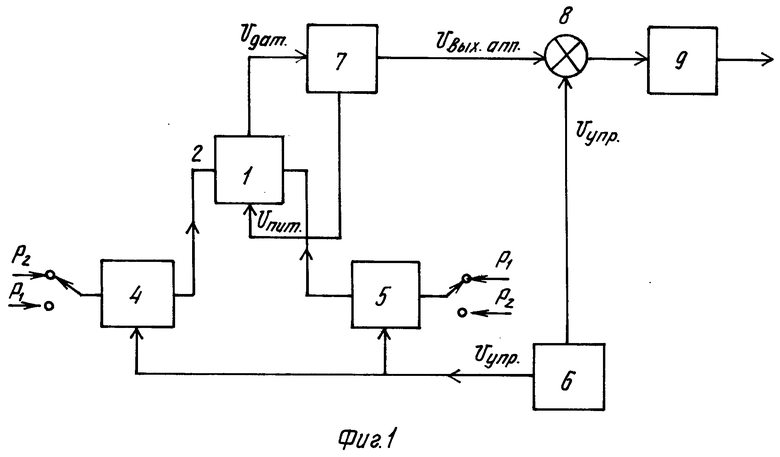
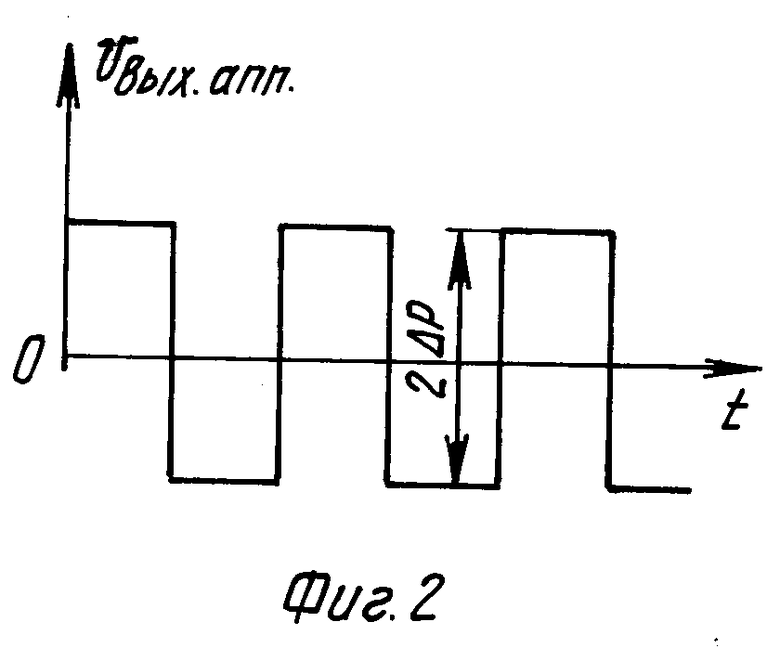
На фиг. 1 приведена структурная схема устройства; на фиг. 2-4 показаны временные диаграммы сигналов: на фиг. 2 - на выходе усилительно-преобразовательного блока при нормальных условиях; на фиг. 3 - то же, но при наличии дрейфа; на фиг. 4 - на выходе интегратора.
Устройство состоит из дифференциального датчика 1 давления, имеющего два пневмовхода 2 и 3, двухпозиционных пневмопереключателей 4 и 5, генератора 6 периодического управляющего сигнала, электронного усилительно-преобразовательного блока 7, умножителя 8, интегратора 9 и индикатора.
Пневмовходы датчика подключены к соответствующим выходам пневмопереключателей, входы каждого из которых подключены к точкам отбора давления измеряемой среды. Выход усилительно-преобразовательного блока соединен с первым входом умножителя, второй вход которого подключен к выходу генератора периодического управляющего сигнала, другой выход которого подключен к управляющим входам обоих пневмопереключателей, а выход умножителя через интегратор связан с индикатором.
При измерении перепада давления путем подключения двух пневмовходов дифференциального датчика к соответствующим точкам отбора давления измеряемой среды, усиления и преобразования выходного сигнала формируют управляющий сигнал в виде периодической функции времени, один из пневмовходов дифференциального датчика в процессе измерений периодически синхронно управляющему сигналу подключают поочередно то к первой, то к второй точке отбора давления, а другой пневмовход дифференциального датчика подключают синхронно с первым входом к другой точке отбора давления, при этом выходной сигнал датчика после усиления умножают на сформированный управляющий сигнал, а о величине перепада давления судят по значению интеграла от результата умножения сигналов за время цикла измерения.
При пояснении сущности способа измерения перепада давления предположим для упрощения выкладок, что периодическая функция является гармонической функцией, например sin ωt. Тогда при принятом допущении, поскольку датчика реагирует на Δp, имеем
ΔP=Δ Pm sin ω t,
ΔP/ω t=0= ΔPm=P1-P2,
ΔP/ωt= π =-(P1-P2).
Соответственно сигнал на выходе электронно-преобразовательного блока
ε (c)(t)= ε msinωt, где ε (c)m=S ΔP, S - коэффициент преобразования блока.
После умножения на управляющую периодическую функцию и интегрирования на выходе устройства, т.е. на индикаторе, будем иметь
ε
 ε
ε
(1)
Фактически выходной сигнал датчика и блока соответственно содержит кроме полезной, информационной составляющей ε(c)n(t) также составляющую температурного дрейфа ε(c)g(t), т.е.
ε(c)(t)= ε (c)n(t)+ ε (c)g(t) (2)
Подставляя (2) в (1), получим
ε
 ε
ε
(3)
Допустим, что дрейф может быть аппроксимирован линейной функцией времени
ε (c)g(t)= ε (c)go+ at (4)
Подставляя (4) в (3), получим
ε 1-2
1-2
(5)
Таким образом, согласно (5), в выходном сигнале составляющая, обусловленная дрейфом, сильно ослабляется, а ее постоянная часть вообще отсутствует. При этом погрешность, обусловленная дрейфом, выражается следующим образом:
δдр= 2 (6)
(6)
Пусть, например, секундный дрейф нуля составляет 1% от номинальной величины измеряемого сигнала, т.е.
at/ ε(c)m=0,01 при t=1 c.
Допустим, что частота переключений пневмовходов датчика составляет 20/1 с, т.е. T= 1/20 и ω = 40 π . Тогда даже при большом дрейфе нуля, который мы задали, за 100 с он составляет 100%, т.е. полный диапазон измерения, ошибка от дрейфа ничтожно мала: 1%/40 π .
Устройство работает следующим образом. Пневмовходы 2 и 3 дифференциального датчика 1 с помощью двухпозиционных переключателей 4 и 5 поочередно соединяются с точками отбора давлений P1 и P2, разность которых или перепад между которыми измеряется. Пневмопереключатели синхронно коммутируются генератором 6 периодического управляющего сигнала, например последовательностью прямоугольных импульсов. При этом в течение времени от 0 до t1=  (фиг. 2) на пневмовход 2 датчика 1 подается давление Р2, а на пневмовход 3 - давление Р1, в последующий полупериод - наоборот. Благодаря этому сигнал на выходе усилительно-преобразовательного блока, на вход которого поступает сигнал датчика Uдат, имеет вид также последовательности прямоугольных импульсов, в то время как давления Р1 и Р2 являются постоянными или медленно изменяющимися величинами по сравнению с Т - периодом, коммутации пневмопереключателей. Блок 7 обеспечивает датчик или схему, в которую он включен, напряжением питания Uп.
(фиг. 2) на пневмовход 2 датчика 1 подается давление Р2, а на пневмовход 3 - давление Р1, в последующий полупериод - наоборот. Благодаря этому сигнал на выходе усилительно-преобразовательного блока, на вход которого поступает сигнал датчика Uдат, имеет вид также последовательности прямоугольных импульсов, в то время как давления Р1 и Р2 являются постоянными или медленно изменяющимися величинами по сравнению с Т - периодом, коммутации пневмопереключателей. Блок 7 обеспечивает датчик или схему, в которую он включен, напряжением питания Uп.
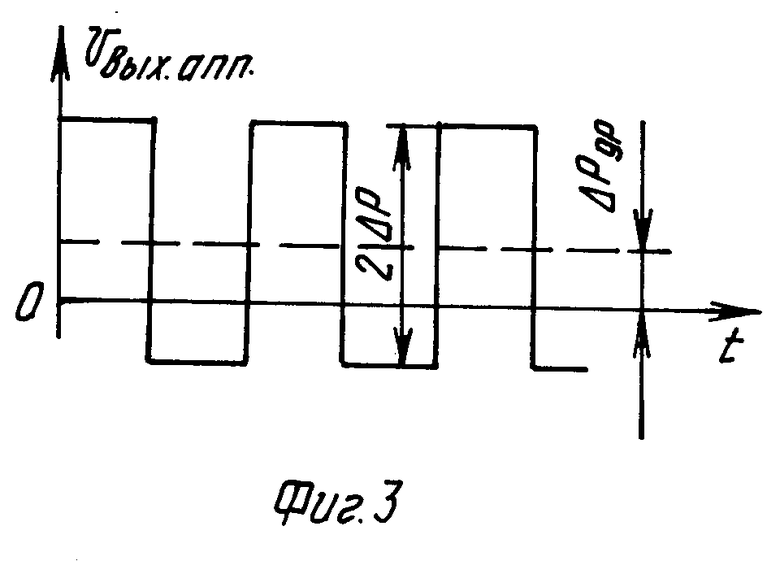
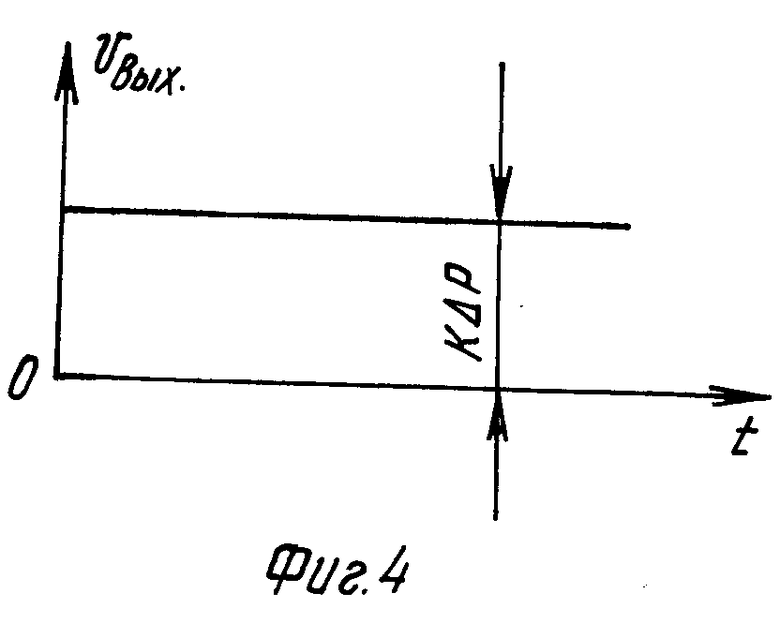
Выходной сигнал блока Uвыхапп подается на вход умножителя 8, например фазочувствительного выпрямителя, коммутируемого напряжением Uупр от генератора 6. После интегрирования выходного сигнала умножителя, например с помощью фильтра низкой частоты, сигнал на его выходе, даже несмотря на, то что вследствие дрейфа на выходе аппаратуры он может быть смещен на величину, пропорциональную ΔРдр (фиг. 3), будет пропорционален KΔ P (фиг. 4). Благодаря коммутации пневмовходом также будет осуществляться компенсация погрешности гистерезиса, если ею обладает датчик.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ НАПРАВЛЕНИЯ СКОРОСТИ ГАЗОВОГО ПОТОКА | 1991 |
|
RU2008689C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПЕРЕПАДА ДАВЛЕНИЯ | 2006 |
|
RU2297607C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДАВЛЕНИЯ | 1996 |
|
RU2104506C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДАВЛЕНИЯ | 1994 |
|
RU2084847C1 |
| ЕМКОСТНЫЙ ДАТЧИК ДАВЛЕНИЯ | 1994 |
|
RU2102712C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПУЛЬСАЦИЙ ДАВЛЕНИЯ И ЕМКОСТНЫЙ ДАТЧИК ДАВЛЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2087883C1 |
| СПОСОБ ИЗМЕРЕНИЯ ИЗМЕНЕНИЯ ДАВЛЕНИЯ В ТРУБОПРОВОДЕ ТРАНСПОРТИРОВКИ ЖИДКОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2426080C1 |
| ЕМКОСТНЫЙ ДАТЧИК ДАВЛЕНИЯ | 1994 |
|
RU2084848C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДАВЛЕНИЯ | 1991 |
|
RU2029266C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПУЛЬСАЦИЙ ДАВЛЕНИЯ И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ | 1999 |
|
RU2145066C1 |
Использование: в аэродинамическом эксперименте, при измерении скоростей газовых потоков. Сущность изобретения: периодически поочередно соединяют пневмоходы дифференциального датчика давления с точками отбора давлений. Выходной сигнал датчика перемножают с функцией переключения пневмовходов, результат перемножения фильтруют или интегрируют. Способ реализуется устройством, содержащим дифференциальный датчик с пневмовходами. Выход датчика подключен к электронному усилительно-преобразовательному блоку. Устройство снабжено двумя двухпозиционными пневмопереключателями, генератором периодического управляющего сигнала, умножителем и интегратором. Схема устройства обеспечивает модуляцию измеряемого пневмосигнала и демодуляцию (с накоплением) преобразованного электрического сигнала. Это позволяет уменьшить аддитивную температурную погрешность и погрешность гистерезиса. 2 с.п.ф-лы, 4 ил.
СПОСОБ ИЗМЕРЕНИЯ ПЕРЕПАДА ДАВЛЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Похвалинский С.М | |||
| Температурные погрешности малогабаритных индуктивных преобразователей давления | |||
| Труды ЦАГИ, вып.2277, 1985, с.58-68. | |||
