Изобретение относится к машиностроению и может быть использовано, например, в установках ионной, электронной, рентгеновской и фотолитографии, в конструкциях различных микроскопов, координатно-измерительных машин.
Известен координатный стол для перемещения изделий в пространстве координатно-измерительной машины, содержащий гидростатические направляющие, уплотненные на торцах герметизирующими элементами манжетного типа, привод, устройство управления приводом, выполненное в виде электрогидравлических преобразователей, устройство измерения положения координатного стола.
Недостатком известного стола является большое время его прецизионного позиционирования вследствие того, что электрогидравлические преобразователи, регулирующие расход рабочей жидкости, содержат подвижные, инерционные элементы. Вследствие наличия относительно грубой одноступенчатой системы позиционирования, только приводами координатного стола, низка точность его позиционирования. К этому же результату приводит и наличие больших сил трения в направляющих, например, в герметизирующих элементах манжетного типа. Вследствие наличия значительных сил трения происходит разрушение рабочих поверхностей элементов стола, что приводит к засорению продуктами износа как самих направляющих, так и дросселирующих каналов устройства управления приводами электрогидравлического типа. Как следствие этого - выход их из строя (заклинивание) и снижение надежности координатного стола в целом. Наличие в конструкции координатного стола широко известных гидростатических направляющих, работающих на минеральных маслах, не позволяет осуществлять в процессе его работы непрерывные юстировочные перемещения изделия в автоматическом режиме или постоянную стабилизацию его положения в пространстве по шести пространственным координатам - X,Y,Z, αx,αy,αz . Кроме того, при настройке координатного стола требуется с высокой точностью выставлять параллельность направляющих, устанавливать и поддерживать постоянным расход рабочей жидкости через их регуляторы расхода ручного типа, а в процессе эксплуатации координатного стола требуется их дополнительная периодическая поднастройка, что очень трудоемко и неудобно.
Наиболее близким техническим решением к изобретению, принятым за прототип, является устройство прецизионного координатного стола, содержащего неподвижное основание, на котором установлена нижняя каретка на двух гидростатических направляющих, уплотненных скользящими герметизирующими элементами манжетного типа и сварными металлическими сильфонами и снабженных входными гидравлическими дросселями с ручным регулированием, верхнюю каретку, установленную на нижней каретке с возможностью перемещения на двух аналогичных гидростатических направляющих в направлении, перпендикулярном направлению перемещения нижней каретки, привод в виде двух гидроцилиндров, приводящих каретки, устройство управления приводом электрогидравлического типа, двухкоординатное устройство измерения положения координатного стола, насосную станцию, гидравлически соединенную с приводом, устройством упратвления, направляющими посредством гибких эластичных трубопроводов.
В конструкции такого координатного стола возникают большие силы сопротивления его перемещению, которые определяются значительными силами трения в герметизирующих элементах гидростатических направляющих и гидроцилиндрах координатного стола, уплотненных с помощью скользящих манжетных уплотнений. Причем штоки гидроцилиндров дополнительно герметизированы от утечек рабочей жидкости в технологический объем (вакуумную камеру) металлическими сильфонами, от которых вследствие их упругой деформации возникают дополнительные силы сопротивления, изменяющиеся как по величине, так и по направлению. Кроме того, при перемещении кареток координатного стола возникают силы сопротивления от упругой деформации стенок гибких трубопроводов, препятствующие его перемещению. Вследствие этого происходит увеличение токов трогания гидродвигателя, приводит к увеличению зоны нечувствительности координатного стола, которая прямо пропорциональна силам сопротивления перемещению, и значительно снижает точность позиционирования, возрастает потребление энергии. Ухудшаются динамические характеристики координатного стола, например плавность перемещения, характер и величина переходных характеристик и т.д. Наличие в конструкции координатного стола широко известных типовых гидростатических направляющих не позволяет осуществлять непрерывные во времени их юстировочные перемещения в автоматическом режиме или непрерывную автоматическую стабилизацию положения изделия, установленного на верхней каретке по шести пространственным координатам - X,Y,Z, αx,αy,αz .
Вследствие того, что в устройстве управления гидроприводом координатного стола используются электрогидравлические преобразователи, которые содержат перемещающиеся в вязкой среде подвижные инерционные элементы, например мембраны, пружины, якоря электромагнитов, золотники, обладающие вследствие этого большим временем срабатывания, значительно снижается быстродействие гидроприводов координатного стола. К этому же результату вследствие упругой деформации стенок приводит использование в качестве трубопроводов гибких эластичных шлангов. Наличие значительных сил трения и переменных циклических нагрузок в узлах герметизации гидростатических направляющих и гидроцилиндров, а также в подвижных элементах устройств управления ими приводит к быстрому износу трущихся поверхностей, засорению продуктами износа дросселирующих каналов гидростатических направляющих, регуляторов расхода рабочей жидкости гидростатических направляющих, устройства управления гидроприводами электрогидравлического типа и выходу из строя этих устройств, а следовательно, к снижению надежности координатного стола в целом.
Целью изобретения является повышение точности позиционирования, быстродействия, надежности, расширение функциональных возможностей, улучшение динамических характеристик и технологической настройки координатного стола.
Цель достигается тем, что координатный стол снабжен гидростатическими направляющими цилиндрической формы, каждая из которых снабжена двумя гидростатическими опорами, расположенными на базовом расстоянии друг от друга, каждая из которых состоит из двух расположенных в вертикальной плоскости и двух расположенных в горизонтальной плоскости камер высокого давления, причем каждая из камер высокого давления гидравлически соединена с насосной станцией через магнитореологический дроссель, вокруг каждой камеры высокого давления расположены камеры низкого давления. С целью повышения точности позиционирования, надежности и быстродействия гидростатические направляющие цилиндрической формы уплотнены герметизирующими элементами, выполненными в виде эластичных тонкостенных оболочек в форме тел вращения, установленных с возможностью перекатывания между гидростатической направляющей цилиндрической формы и соответствующей кареткой. Кроме того, с целью повышения точности позиционирования, быстродействия, надежности и улучшения динамических характеристик приводы выполнены в виде двух пар гидродвигателей для приведения нижней и верхней кареток соответственно, причем каждая из пар гидродвигателей снабжена двумя толкателями, соединенными с противоположными сторонами соответствующих кареток, уплотненных в корпусах гидродвигателей с помощью эластичных тонкостенных оболочек в форме тел вращения, установленных с возможностью перекатывания последних между толкателями и корпусами гидродвигателей, при этом каждая пара гидродвигателей гидравлически соединена с насосной станцией через магнитореологический распределитель, состоящий из четырех магнитореологических дросселей, включенных по мостовой схеме.
С этой же целью пара гидродвигателей, приводящих верхнюю каретку, гидравлически соединена с магнитореологическим распределителем и насосной станцией через две пары гидропередаточных узлов, а гидростатические направляющие цилиндрической формы, установленные на нижней каретке, гидравлически соединены с насосной станцией через две другие пары гидропередаточных узлов, причем последние выполнены в виде полых толкателей, расположенных соосно и параллельно направлению перемещения нижней каретки в каждой паре гидропередаточных узлов, жестко соединенных с нижней кареткой и уплотненных в корпусах гидропередаточных узлов с помощью тонкостенных оболочек в форме тел вращения, установленных с возможностью перекатывания между полыми толкателями и корпусами гидропередаточных узлов. С целью расширения функциональных возможностей, повышения надежности, быстродействия и уменьшения энергопотребления путем создания градиентных сил магнитного поля магнитореологические дроссели выполнены в виде индуктора магнитного поля, охваченного магнитопроводом, состоящим из стакана, полюсной цилиндрической проставки и полюсной шайбы, образующих цилиндрический кольцевой дросселирующий канал, причем по меньшей мере на одной из полюсных частей магнитопровода выполнены зубцы в форме трапеции, впадины которых заполнены диамагнитным материалом. С целью повышения надежности и быстродействия герметизирующие элементы выполнены в виде эластичных тонкостенных оболочек в форме тел вращения, армированных в осевом направлении. С целью повышения надежности, расширения функциональных возможностей координатного стола полюсная цилиндрическая проставка магнитореологического дросселя выполнена тонкостенной из ферромагнитного эластичного материала. С этой же целью кольцевая часть полюсной шайбы магнитореологического дросселя снабжена перегородкой с каналами отвода рабочей жидкости и упорами из диамагнитного материала, а внутренняя часть тонкостенной полюсной цилиндрической проставки со стороны полюсной шайбы снабжена перегородкой из ферромагнитного материала, причем полюсная проставка установлена с возможностью осевого перемещения.
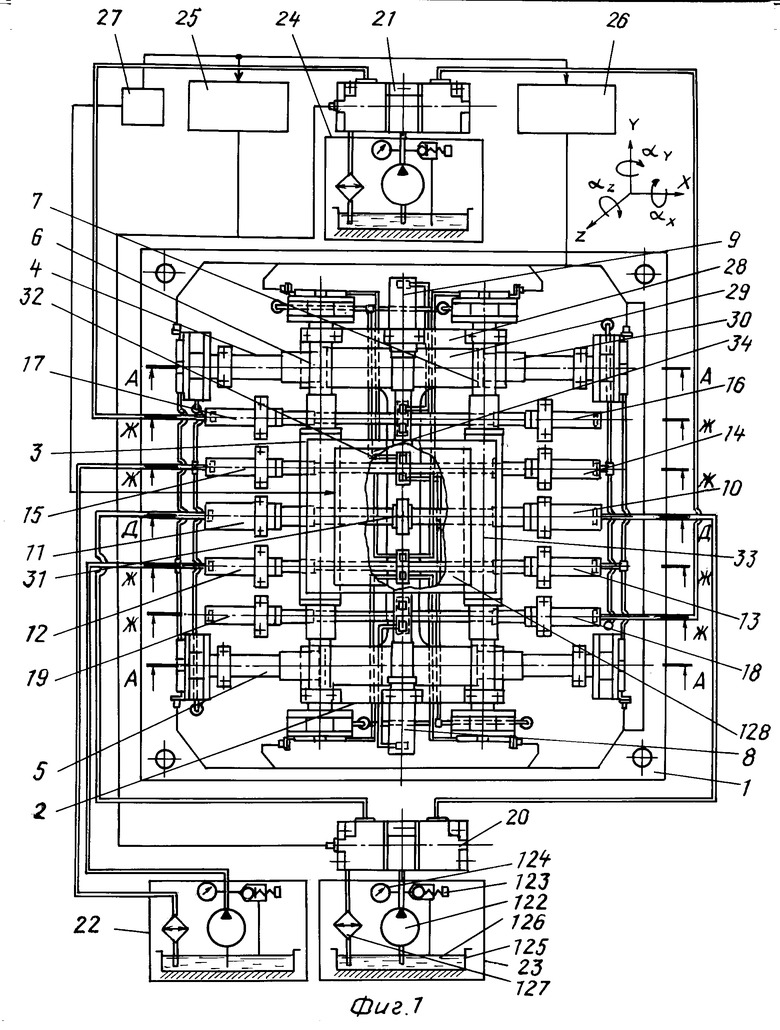
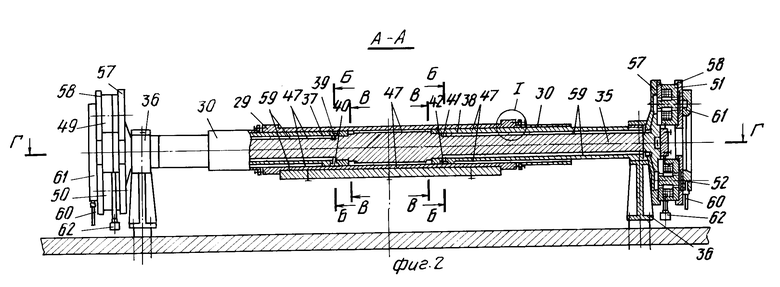
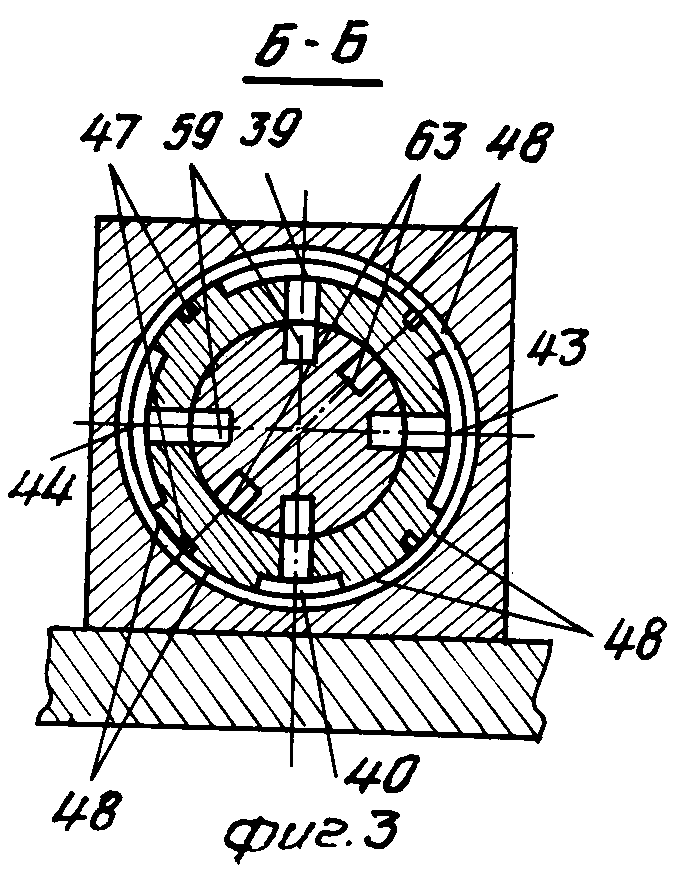
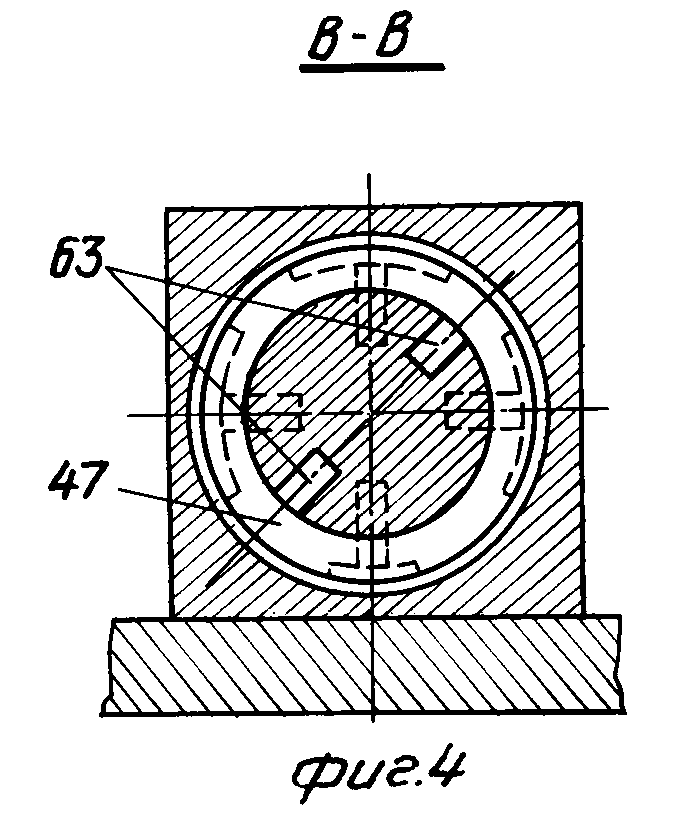
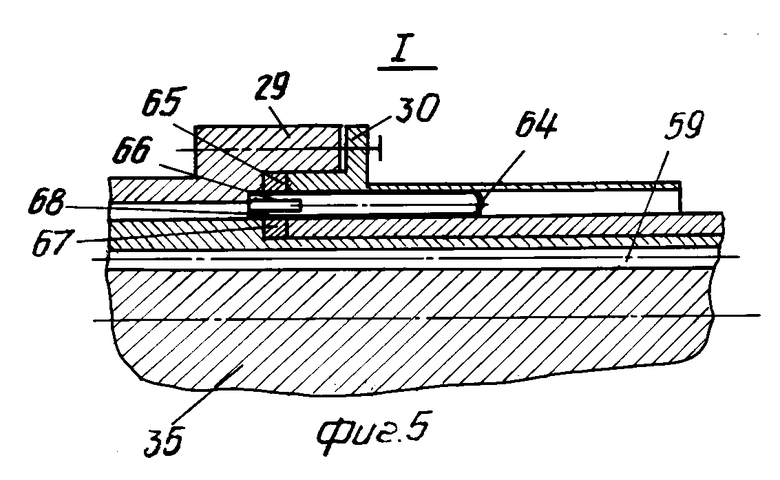
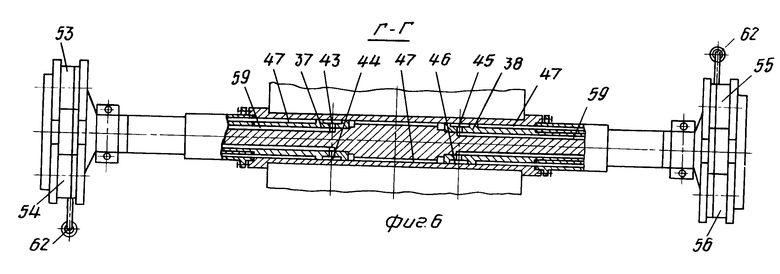
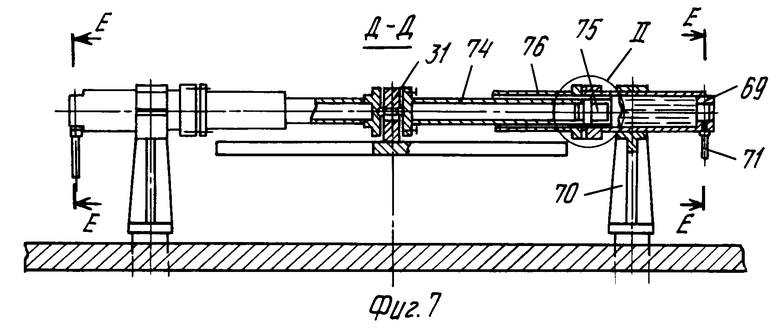
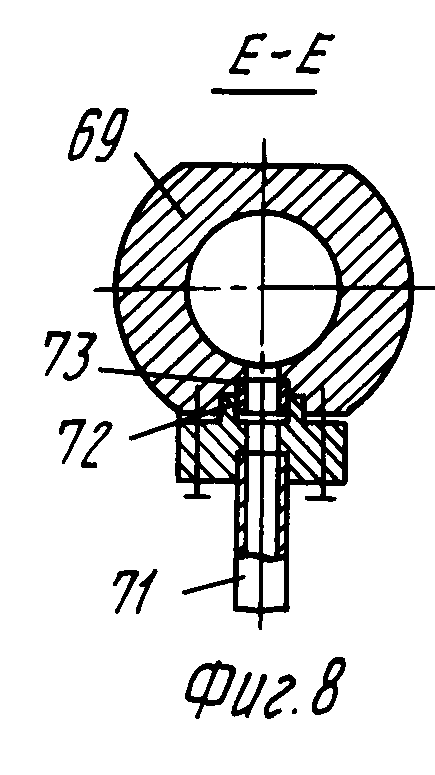
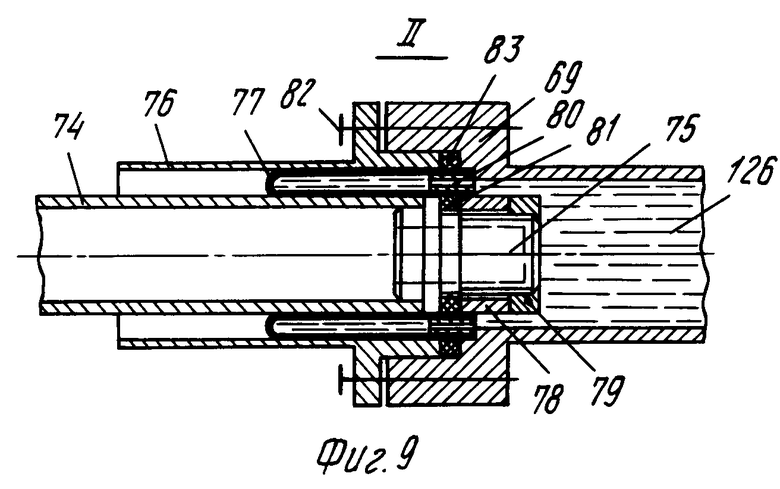
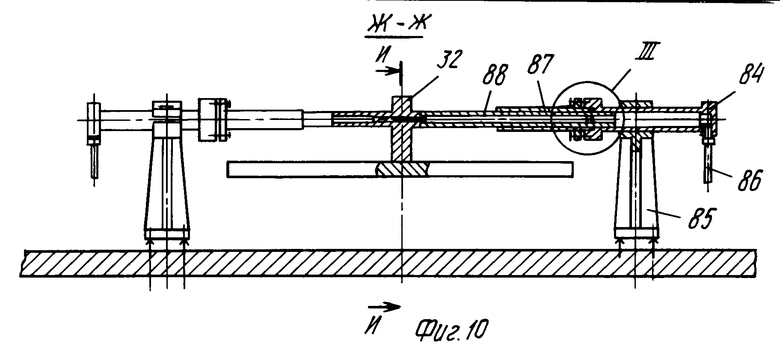
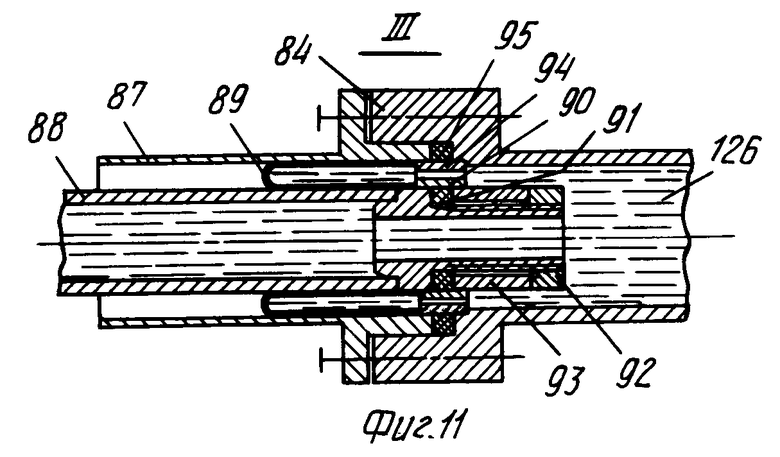
На фиг.1 изображена структурная схема координатного стола, вид сверху; на фиг. 2 показан разрез А-А на фиг.1 - в вертикальной плоскости гидростатической направляющей нижней каретки координатного стола; на фиг.3 - разрез Б-Б на фиг.2 - по оси гидростатической опоры гидростатической направляющей; на фиг. 4 - разрез В-В на фиг.2 - камер низкого давления гидростатической направляющей; на фиг.5 - узел I на фиг.2 - крепления герметизирующего элемента гидростатической направляющей; на фиг.6 - разрез Г-Г на фиг.2 - в горизонтальной плоскости гидростатической направляющей нижней каретки координатного стола; на фиг.7 - разрез Д-Д на фиг.1 - в вертикальной плоскости гидродвигателя координатного стола; на фиг.8 - разрез Е-Е на фиг.7 - гидродвигателя в месте подсоединения трубопровода; на фиг.9 - узел II на фиг.7 - крепления герметизирующего элемента гидродвигателя; на фиг.10 - разрез Ж-Ж на фиг.1 - в вертикальной плоскости гидропередаточного узла; на фиг.11 - узел III на фиг.10 - крепления герметизирующего элемента гидропередаточного узла; на фиг.12 - разрез И-И на фиг.10 - гидропередаточного узла в месте соединения полого толкателя с нижней кареткой координатного стола; на фиг.13 - магнитореологический распределитель; на фиг.14 - разрез магнитореологического распределителя по каналу отвода рабочей жидкости; на фиг.15 - разрез К-К на фиг.13; на фиг.16 - магнитореологический дроссель; на фиг.17 - магнитореологический дроссель с тонкостенной цилиндрической полюсной проставкой из ферромагнитного эластичного материала; на фиг.18 - магнитореологический дроссель с перегородкой в полюсной шайбе и тонкостенной цилиндрической полюсной проставке.
Координатный стол (фиг.1) содержит неподвижное основание 1, нижнюю каретку 2, установленную с возможностью перемещения на неподвижном основании, верхнюю каретку 3, установленную на нижней каретке с возможностью перемещения перпендикулярно направлению перемещения нижней каретки, четыре гидростатических направляющих 4-7 цилиндрической формы, четыре гидродвигателя 8-11, восемь гидропередаточных узлов 12-19, два магнитореологических распределителя 20,21, три насосные станции 22,23,24, систему 25 управления приводами координатного стола, систему 26 управления гидростатическими направляющими координатного стола, систему 27 измерения перемещения координатного стола. Нижняя каретка 2 установлена на неподвижном основании 1 с возможностью перемещения по двум гидростатическим направляющим 4,5, а верхняя каретка 3 - по двум гидростатическим направляющим 6,7. Кроме того, гидростатические направляющие 4,5 цилиндрической формы для перемещения нижней каретки 2 гидравлически соединены с насосной станцией 22, а гидростатические направляющие 6,7 цилиндрической формы для перемещения верхней каретки 3 гидравлически соединены также с насосной станцией 22 через две пары гидропередаточных узлов 12,13 и 14,15, установленных на неподвижном основании 1 соосно и параллельно направлению перемещения нижней каретки 2 в каждой паре гидропередаточных узлов 12,13 и 14,15. Для привода нижней каретки 2 на неподвижном основании закреплена пара гидродвигателей 10,11, соединенных с противоположными сторонами нижней каретки, установленных соосно и параллельно направлению ее перемещения и гидравлически соединенных с насосной станцией 23 через магнитореологический распределитель 20. Для привода верхней каретки 3 на нижней каретке 2 закреплена пара гидродвигателей 8,9, соединенных с противоположными сторонами верхней каретки 3 и гидравлически соединенных с насосной станцией 24 через две пары гидропередаточных узлов 16,17 и 18,19, закрепленных на неподвижном основании 1 соосно в каждой паре и установленных параллельно направлению перемещения нижней каретки 2, и через магнитореологический распределитель 21.
Неподвижное основание 1 служит для закрепления на нем гидростатических направляющих 4,5 цилиндрической формы для перемещения нижней каретки 2, гидродвигателей 10,11 и четырех пар гидропередаточных узлов 12,13 и 14,15, и 16,17, и 18,19.
Нижняя каретка 2 служит для закрепления на ней гидростатических направляющих 6,7 цилиндрической формы для перемещения верхней каретки 3, двух гидродвигателей 8,9, обеспечивает перемещение изделия, установленного на верхней каретки 3, в направлении Х и содержит плиту 28, два корпуса 29, закрепленных на плите 28, четыре цилиндрических стакана 30, закрепленных на каждом торце корпуса 29, стойку 31 и четыре стойки 32.
Верхняя каретка 3 служит для установки на ней изделия и зеркал системы 27 измерения перемещения координатного стола и перемещения его в направлении Y и содержит плиту 33, две стойки 34, два корпуса 29, закрепленных на плите 33, четыре цилиндрических стакана 30, закрепленных на каждом торце корпуса 29.
Гидростатические направляющие 4,5 и 6,7 [фиг.2-6] цилиндрической формы предназначены для перемещения по ним нижней каретки 2 и верхней каретки 3 соответственно и содержат цилиндрический стержень 35, установленный на двух регулируемых опорах 36, по продольной оси которого расположены на базовом расстоянии друг от друга две гидростатические опоры 37 и 38. Каждая из последних состоит из двух расположенных в вертикальной плоскости камер 39,40 и 41,42 высокого давления соответственно и двух расположенных в горизонтальной плоскости камер 43,44 и 45,46 высокого давления соответственно, причем вокруг каждой камеры высокого давления расположены четыре камеры 47 низкого давления (слива). Последние гидравлически соединены с соответствующей камерой высокого давления через радиальный кольцевой дросселирующий канал 48, образованный наружной цилиндрической поверхностью гидростатической опоры 37,38 и внутренней цилиндрической поверхностью корпуса 29, расположенных соосно. На входах в каждую из камер 39,40,41,42,43,44,45,46 высокого давления установлены магнитореологический дроссели 49,50,51,52,53,54,55,56 соотвтственно, закрепленные по четыре на двух противоположных торцах цилиндрического стержня 35 при помощи фланцев 57 и 58. Камеры 39,40,41,42,43,44,45,46 высокого давления гидравлически соединены гидроканалами 59 с магнитореологическими дросселями 49,50,51,52,53,54,55,56 соответственно, а последние гидравлически соединены с подводящими трубопроводами 60 через фланцы 61. Камеры 47 низкого давления (слива) гидравлически соединены с отводящими трубопроводами 62 гидроканалами 63. Полости гидростатических направляющих 4,5,6,7, образованные цилиндрическим стержнем 35 и цилиндрической поверхностью корпуса 29, уплотнены со стороны его торцов герметизирующими элементами 64 в виде эластичных тонкостенных оболочек в форме тел вращения, установленных с возможностью перекатывания между корпусом 29 и цилиндрическим стержнем 35. Один конец герметизирующего элемента 64 крепится к корпусу 29 при помощи цилиндрического стакана 30, упругой прокладки 65 и жесткого кольца 66, а другой - к цилиндрическому стержню 35 упругой прокладкой 67 и жестким кольцом 68.
Гидродвигатели 8-11 (фиг.7-9) предназначены для прецизионного перемещения верхней каретки 3 в направлении Y и нижней каретки 2 в направлении Х соответственно. Они установлены попарно и соосно в каждой паре. Гидродвигатель содержит цилиндрический корпус 69, закрепленный в регулируемой опоре 70 и соединенный с трубопроводом 71 через прокладку 72 и втулку 73, полый цилиндрический толкатель 74, заглушенный пробкой 75 и неподвижно закрепленный на стойке 31 или 34, цилиндрический стакан 76, закрепленный соосно на торце цилиндрического корпуса 69, герметизирующий элемент 77 в виде эластичной тонкостенной оболочки в форме тела вращения, установленный с возможностью перекатывания между цилиндрическим корпусом 69 и полым цилиндрическим толкателем 74, причем один конец герметизирующего элемента 77 закреплен на полом цилиндрическом толкателе 74 при помощи втулки 78, гайки 79, жесткого кольца 80 и упругой прокладки 81, а другой - в цилиндрическом корпусе 69 при помощи цилиндрического стакана 76, жесткого кольца 82 и упругой прокладки 83.
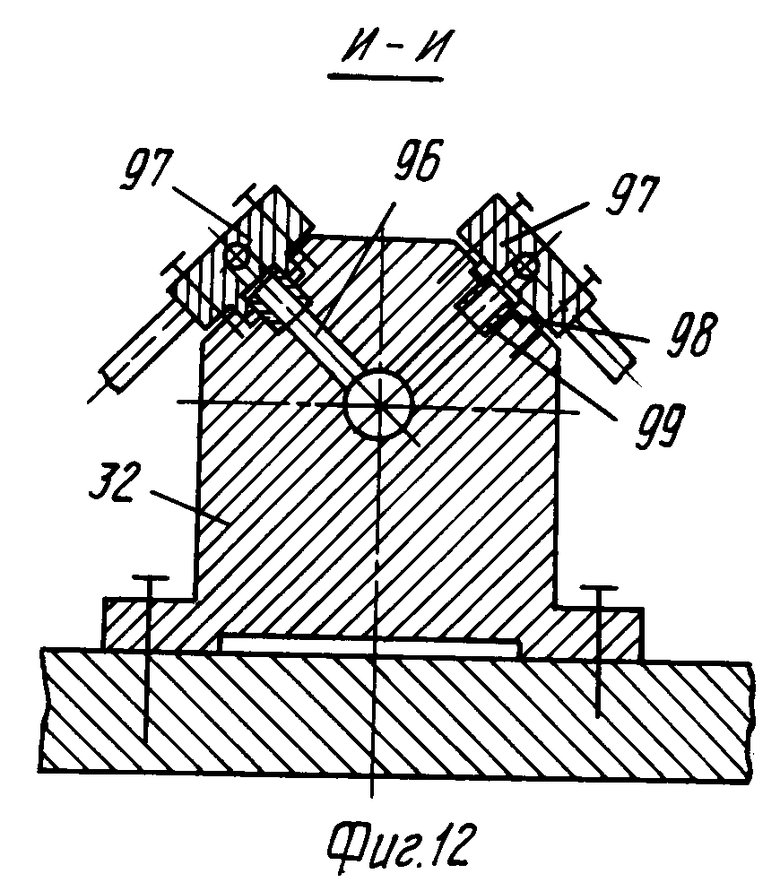
Гидропередаточные узлы 12-19 (фиг.10-12) предназначены для обеспечения жесткой, практически упруго недеформируемой, подвижной гидравлической связи элементов координатного стола. Они установлены попарно и соосно в каждой паре. Гидропередаточный узел содержит цилиндрический корпус 84, закрепленный в регулируемой опоре 85, соединенный с трубопроводом 86, цилиндрический стакан 87, закрепленный на торце цилиндрического корпуса 84, полый цилиндрический толкатель 88, жестко закрепленный на стойке 32, причем внутренняя полость полого цилиндрического толкателя 88 гидравлически соединена с полостью цилиндрического корпуса 84, герметизирующий элемент 89 в виде эластичной тонкостенной оболочки в форме тела вращения, установленный с возможностью перекатывания между цилиндрическим корпусом 84 и полым цилиндрическим толкателем 88. Один конец герметизирующего элемента 89 закреплен на полом цилиндрическом толкателе 88 жестким кольцом 90, упругой прокладкой 91, гайкой 92 и втулкой 93, а другой - на цилиндрическом корпусе 84 цилиндрическим стаканом 87, жестким кольцом 94 и упругой прокладкой 95. Стойка 32 через два гидроканала 96 гидравлически соединена с двумя трубопроводами 97 с помощью прокладок 98 и втулок 99.
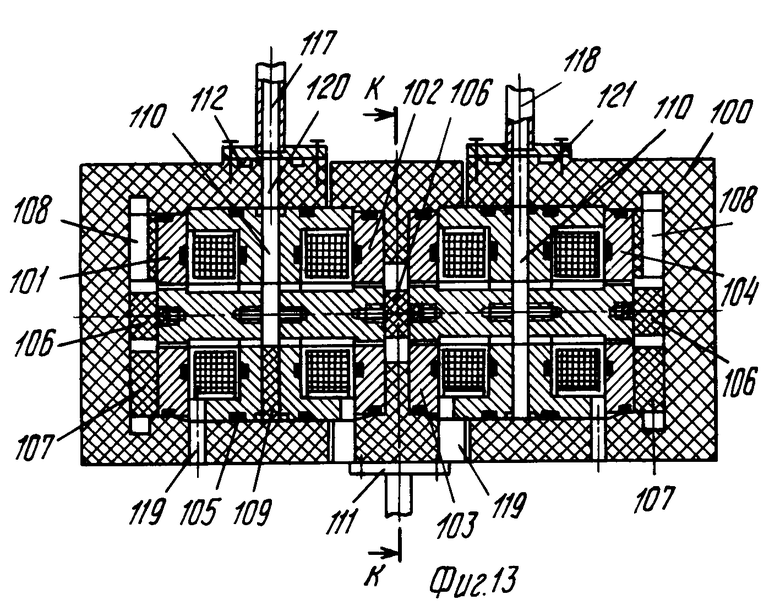
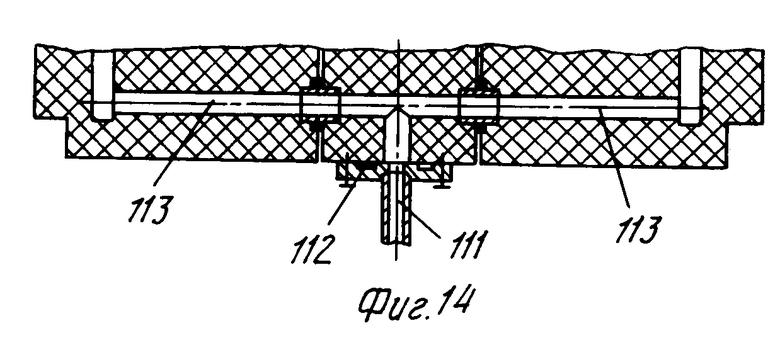
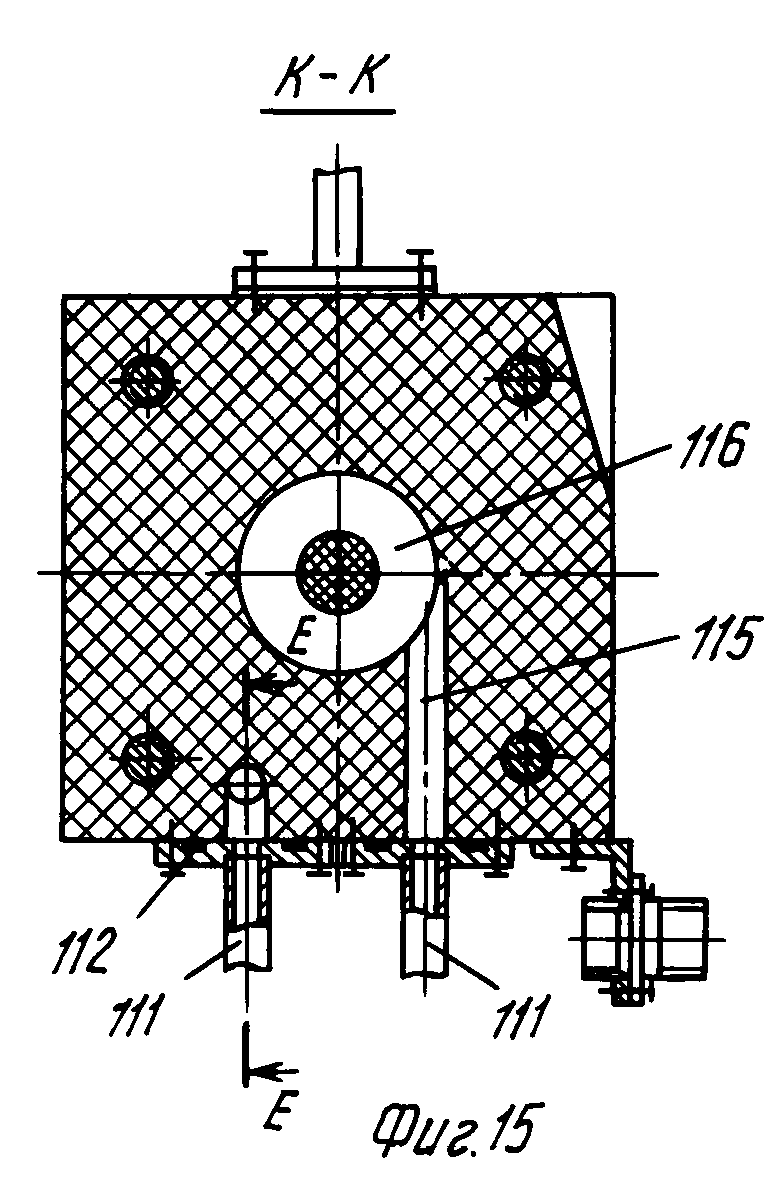
Магнитореологические распределители 20,21 (фиг.13-15) предназначены для управления гидродвигателями 10,11 и 8,9 приводов нижней каретки 2 и верхней каретки 3 соответственно. Магнитореологический распределитель содержит корпус 100, в котором установлены четыре магнитореологических дросселя 101-104, включенных по мостовой схеме, причем каждый из них уплотнен в корпусе 100 двумя кольцами 105. Между каждым магнитореологическим дросселем 101,104 и корпусом 100 в осевом направлении установлены бобышка 106 и фланец 107, имеющий гидроканал 108. Магнитореологические дроссели 102,103 установлены в корпусе 100 в осевом направлении через бобышку 106, а две пары магнитореологических дросселей 101,102 и 103,104 разделены в каждой паре фланцем 109, имеющим радиальный гидроканал 110. Отводящий трубопровод 111 закреплен на корпусе 100 через прокладку 112 и гидравлически соединяет магнитореологический распределитель с соответствующей насосной станцией. Магнитореологические дроссели 101,104 гидравлически соединены с отводящим трубопроводом 111 гидроканалами 113 в корпусе 100 и гидроканалами 108 во фланцах 107. Подводящий трубопровод 114, гидравлически соединяющий пару магнитореологических дросселей 102,103 с соответствующей насосной станцией, закреплен на корпусе 100 через прокладку 112. Подводящий трубопровод 114 гидравлически соединен с магнитореологическими дросселями 102,103 через гидроканалы 115 и 116 в корпусе 100. Трубопроводы 117 и 118 закреплены на корпусе 100 через прокладки 112 и гидравлически соединяют пары магнитореологических дросселей 101,102 и 103,104 соответственно чрез гидроканалы 110 во фланцах 109 и через гидроканалы 120,121 в корпусе 100 с соответствующими гидродвигателями. Через четыре канала 119 в корпусе 100 осуществляется подвод управляющих электрических сигналов к индукторам 129 магнитного поля магнитореологических дросселей 101,102,103,104.
Насосные станции 22,23,24 (фиг.1) предназначены для обеспечения необходимого постоянного расхода рабочей жидкости - магнитореологической суспензии в гидравлической магистрали потребителей и создания требуемых величин давлений в камерах высокого давления гидростатических направляющих и в гидродвигателях. Они обеспечивают работу гидростатических направляющих 4,5,6,7 цилиндрической формы, гидродвигателей 10,11, приводящих нижнюю каретку 2, гидродвигателей 8,9, приводящих верхнюю каретку 3 соответственно. Каждая насосная станция содержит гидравлический насос 122, предохранительный клапан 123, манометр 124, бак 125, рабочую жидкость - магнитореологическую суспензию 126 и теплообменник 127.
Система 25 управления приводами координатного стола (фиг.1) предназначена для управления прецизионными перемещениями по координатам Х и Y нижней каретки 2 и верхней каретки 3 координатного стола посредством гидродвигателей 10,11 и 8,9 и магнитореологических распределителей 20,21 соответственно.
Система 26 управления направляющими координатного стола (фиг.1) предназначена для управления юстировочными перемещениями по координатам X,Y,Z, αx, αy,αz гидростатических направляющих 4,5,6,7 цилиндрической формы, необходимых для перемещения нижней каретки 2 и верхней каретки 3 соответственно посредством установленных на их торцах соответствующих магнитореологических дросселей.
Система 27 измерения перемещения координатного стола (фиг.1) предназначена для непрерывного бесконтактного измерения величин текущих координат (X, Y,Z, αx,αy,αz ) пространственного положения координатного стола и определения направления его перемещения. Она содержит зеркало 128, закрепленное на плите 33 верхней каретки 3, шестикоординатный интерферометр с электронным блоком начальной обработки информации.
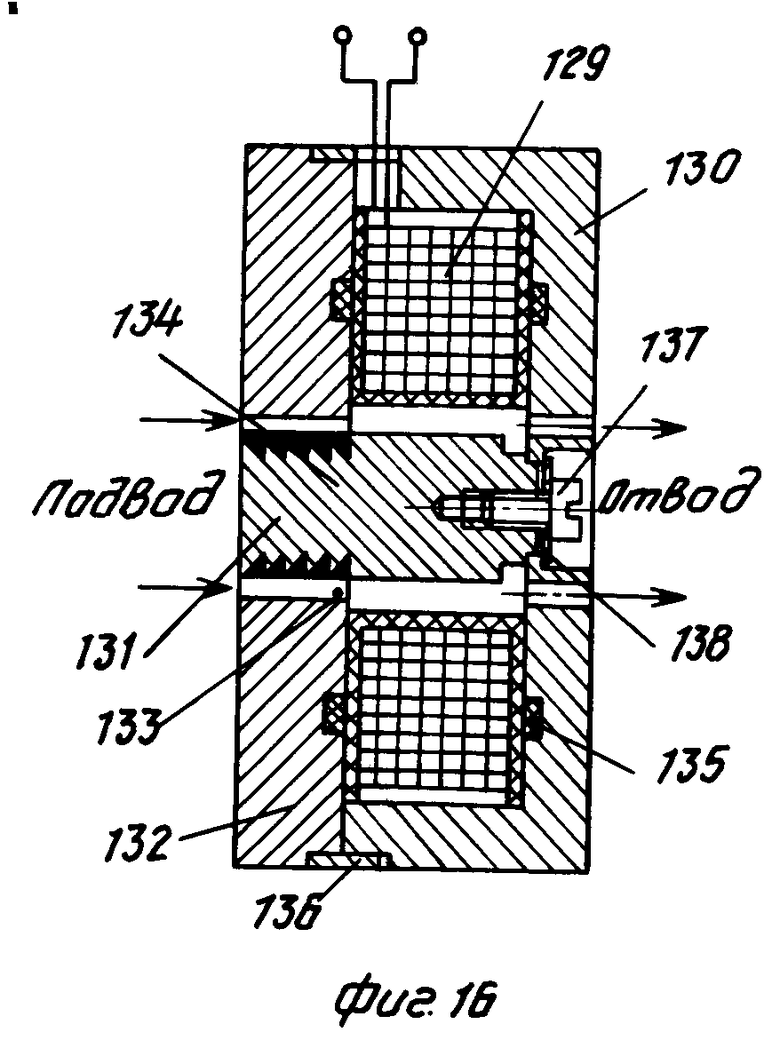
Магнитореологические дроссели 49-56 и 101-104 (фиг.16) предназначены для регулирования величины расхода рабочей жидкости - магнитореологической суспензии, подводимой к камерам высокого давления гидростатических направляющих и гидродвигателям координатного стола. Магнитореологический дроссель содержит индуктор 129 магнитного поля, охваченный магнитопроводом, состоящим из стакана 130, полюсной цилиндрической проставки 131, полюсной шайбы 132, образующих цилиндрический кольцевой дросселирующий канал 133, причем на цилиндрической полюсной проставке 131 выполнены зубцы 134 в форме трапеции, впадины которых заполнены диамагнитным материалом. Индуктор 129 магнитного поля уплотнен между стаканом 130 и полюсной шайбой 132 прокладками 135. Полюсная шайба 132 и стакан 130 соединены при помощи кольца 136, а полюсная цилиндрическая проставка 131 крепится к стакану 130 винтом 137 через шайбу 138.
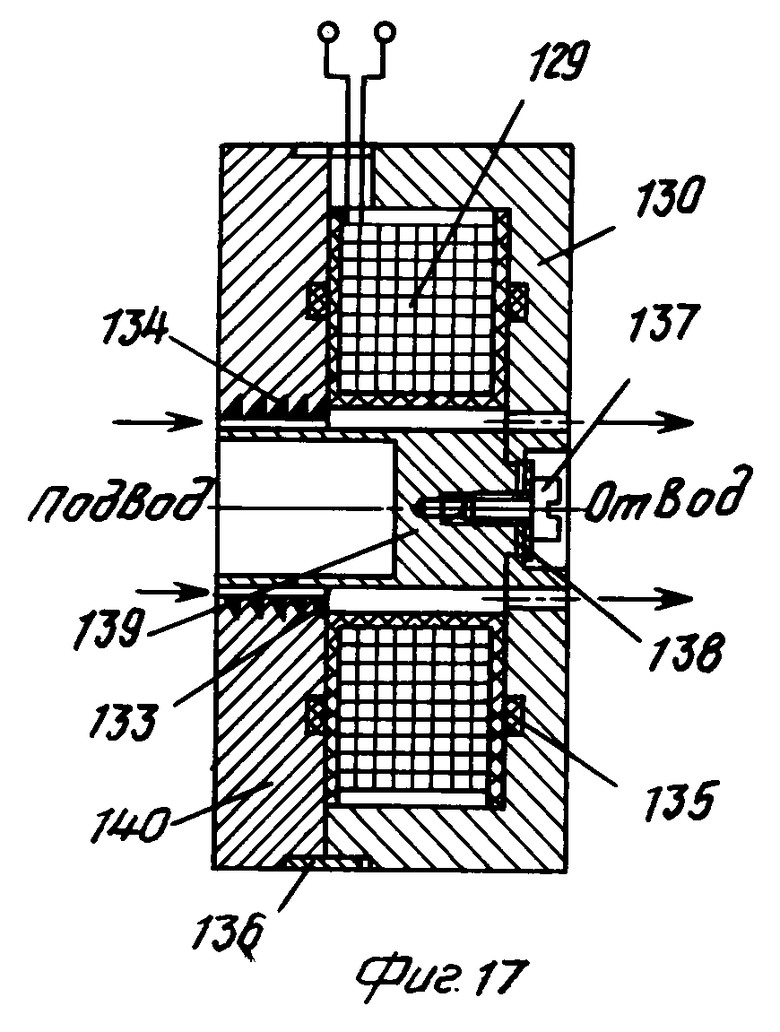
Магнитореологический дроссель на фиг.17 предназначен для расширения диапазона регулирования величины расхода рабочей жидкости - магнитореологической суспензии, подводимой к камерам высокого давления гидростатических направляющих и гидродвигателям координатного стола, а также для повышения надежности, расширения функциональных возможностей. Он содержит индуктор 129 магнитного поля, охваченный магнитопроводом, состоящим из стакана 130, тонкостенной полюсной цилиндрической проставки 139, выполненной из ферромагнитного эластичного материала, полюсной шайбы 140, образующих цилиндрический кольцевой дросселирующий канал 133, причем на полюсной шайбе 140 выполнены зубцы 134 в форме трапеции, впадины которых завполнены диамагнитным материалом. Индуктор 129 магнитного поля уплотнен между стаканом 130 и полюсной шайбой 140 прокладками 135. Полюсная шайба 140 и стакан 130 соединены при помощи кольца 136, а тонкостенная полюсная цилиндрическая проставка 139 крепится к стакану 130 винтом 137 через шайбу 138.
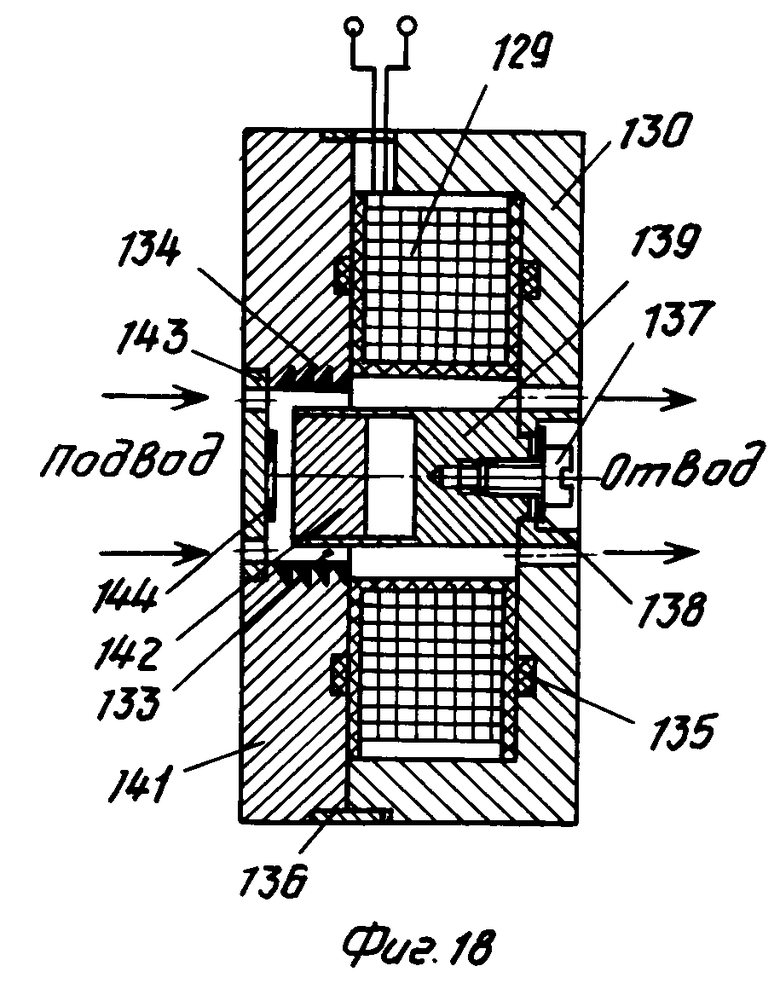
Магнитореологический дроссель на фиг. 18 предназначен для расширения диапазона регулирования величины расхода рабочей жидкости - магнитореологической суспензии, подводимой к камерам высокого давления гидростатических направляющих и гидродвигателям координатного стола, а также для повышения надежности, расширения функциональных возможностей. Он содержит индуктор 129 магнитного поля, охваченный магнитопроводом, состоящим из стакана 130, полюсной шайбы 141, на внутренней цилиндрической поверхности которой выполнены в форме трапеции зубцы 134, впадины которых заполнены диамагнитным материалом, тонкостенной полюсной цилиндрической проставки 139, в которой со стороны полюсной шайбы 141 установлена перегородка 142 из ферромагнитного материала, причем полюсная цилиндрическая проставка 139 установлена с возможностью осевого перемещения, а в кольцевой части полюсной шайбы 141 установлена перегородка 143 с каналами отвода рабочей жидкости, на которой закреплены упоры 144 из диамагнитного материала. Индуктор 129 магнитного поля уплотнен между стаканом 130 и полюсной шайбой 141 прокладками 135. Полюсная шайба 141 и стакан 130 соединены при помощи кольца 136, а тонкостенная полюсная цилиндрическая проставка 139 крепится к стакану 130 винтом 137 через шайбу 138.
Координатный стол работает следующим образом.
Первоначально в каждую из камер 39-46 (фиг.1,2,6) высокого давления гидростатических направляющих цилиндрической формы от гидравлического насоса 122 насосной станции 22 подается постоянный расход рабочей жидкости - магнитореологической суспензии 126. При этом для питания гидростатических направляющих 4,5 нижней каретки 2 рабочая жидкость - магнитореологическая суспензия 126 протекает через подводящие трубопроводы 60 через фланец 61, магнитореологические дроссели 49-56, гидроканалы 59, камеры 39-46 высокого давления, радиальные кольцевые дросселирующие каналы 48, камеры 47 низкого давления (слива) и отводится через отводящие трубопроводы 62 в бак 125 насосной станции 22 через теплообменник 127. Для питания гидростатических направляющих 6,7 цилиндрической формы верхней каретки 3 рабочая жидкость - магнитореологическая суспензия 126 протекает через гидропередаточные узлы 12,13, подводящие трубопроводы 60, фланцы 61, магнитореологические дроссели 49-56, гидроканалы 59, камеры 39-46 высокого давления, радиальные кольцевые дросселирующие каналы 48, камеры 47 низкого давления (слива) и отводится в бак 125 насосной станции 22 через отводящие трубопроводы 62, гидроопередаточные узлы 15,14 и теплообменник 127 насосной станции 22. Под действием создаваемого высокого давления в камерах 39-46 гидростатических направляющих 4,5,6,7 цилиндрической формы корпуса 29, жестко соединенные с плитами 28,33 соответственно нижней каретки 2 и верхней каретки 3, "всплывают" на гидростатических опорах 37,38 и могут перемещаться по гидростатическим направляющим 4,5,6,7 от гидродвигателей 8,9 и 10,11.
Для перемещения нижней каретки 2, например, вправо по оси Х расход рабочей жидкости - магнитореологической суспензии 126 от гидравлического насоса 122 насосной станции 23 поступает по подводящему трубопроводу 114 через магнитореологический распределитель 20 в гидродвигатель 11. При этом в цилиндрическом корпусе 69 (фиг.7) создается давление, которое воздействует на торец толкателя 74, заглушенный пробкой 75, толкатель 74 другим концом жестко связан с нижней кареткой 2. Причем магнитореологические дроссели 101,103 (фиг. 13) магнитореологического распределителя 20 находятся в состоянии "закрыто", а магнитореологические дроссели 102,104 магнитореологического распределителя 20 - в состоянии "открыто". В результате перемещения нижней каретки 2 рабочая жидкость - магнитореологическая суспензия 126 вытесняется из гидродвигателя 10 торцом толкателя 74, заглушенным пробкой 75, в бак 125 насосной станции 23 через магнитореологический распределитель 20, отводящий трубопровод 107, теплообменник 127. Для перемещения нижней каретки 2, например, влево по оси Х состояние магнитореологических дросселей 101,102,103,104 магнитореологического распределителя 20 должно быть изменено на обратное - магнитореологические дроссели 101,103 находятся в состоянии "открыто", а магнитореологические дроссели 102,104 - в состоянии "закрыто". В этом случае расход рабочей жидкости - магнитореологической суспензии 126 от гидравлического насоса 122 насосной станции 23 через магнитореологический распределитель 20 поступает в гидродвигатель 10, заставляя перемещаться толкатель 74, жестко соединенный с нижней кареткой 2. Рабочая жидкость - магнитореологическая суспензия 126 вытесняется торцом толкателя 74 гидродвигателя 11, сливается в бак 125 насосной станции 23 через магнитореологический распределитель 20, отводящий трубопровод 111 и теплообменник 127. Порядок работы привода, перемещающего верхнюю каретку 3 по оси Y, осуществляется аналогично перемещению нижней каретки 2 по оси Х. Причем расход рабочей жидкости - магнитореологической суспензии 126 от гидронасоса 122 насосной станции 24 поступает к гидродвигателям 8 и 9 и отводится от них через гидропередаточные узлы 16,17 и 18,19.
Принцип действия магнитореологических дросселей 101-104 в магнитореологических распределителях 20 и 21 и магнитореологических дросселей 49-56 в гидростатических направляющих 4-7 основан на использовании магнитореологического эффекта - обратимого изменения динамической вязкости вплоть до затвердевания взвеси мелкодисперсных ферромагнитных частиц в жидкой среде - магнитореологической суспензии 126 под действием внешнего магнитного поля, накладываемого на нее при протекании в цилиндрических кольцевых дросселирующих каналах 133 (фиг.16-18) магнитореологических дросселей. В результате такого воздействия изменяется гидравлическое сопротивление магнитореологических дросселей
RМРД(I) =  =
=  · μ(I) (1) где RМРД(I) - гидравлическое сопротивление магнитореологического дросселя;
· μ(I) (1) где RМРД(I) - гидравлическое сопротивление магнитореологического дросселя;
I - ток в индукторе магнитного поля;
Δ РМРД - перепад давления на магнитореологическом дросселе;
qМРД - расход через магнитореологический дроссель;
l - длина дросселирующего цилиндрического канала магнитореологического дросселя в направлении течения магнитореологической суспензии;
D - средний диаметр дросселирующего цилиндрического канала;
S - кольцевой зазор дросселирующего цилиндрического канала;
μ (I) - зависимость динамической вязкости от тока в индукторе магнитного поля.
Таким образом, обеспечив постоянный расход qМРДмагнитореологической суспензии через магнитореологический дроссель, получают основополагающую аналитическую зависимость
ΔPМРД(I) = qМРД·  · μ(I) = Pн-P(I) (2) где Рн - давление гидронасоса (давление перед магнитореологическим дросселем);
· μ(I) = Pн-P(I) (2) где Рн - давление гидронасоса (давление перед магнитореологическим дросселем);
Р(I) - давление, например, в камере высокого давления гидростатической направляющей (давление за магнитореологическим дросселем);
qМРД - const;
Pн - const, позволяющую пояснить принцип осуществления управляемых юстировочных перемещений гидростатических направляющих 4,5,6,7 цилиндрической формы и принцип работы магнитореологического следящего гидропривода координатного стола. Так, независимо управляя величинами давления рабочей жидкости P(I) во всех камерах высокого давления гидростатических направляющих цилиндрической формы, можно непрерывно в процессе работы стола управлять величинами их подъемной силы, а следовательно, пространственным положением нижней и верхней кареток координатного стола.
Прецизионное позиционирование координатного стола по шести координатам: трем линейным - X,Y,Z (фиг.1) и трем угловым - αx,αy,αzосуществляется в два этапа. Сначала координатный стол позиционируется относительно "грубой" ступенью позиционирования, включающей гидродвигатели 8-11. По достижении точности позиционирования, равной зоне нечувствительности координатного стола, начинается процесс юстировочного перемещения с помощью ступени "точного" позиционирования по всем шести пространственным координатам, основанный на целенаправленном изменении динамической вязкости протекающей в гидростатических направляющих 4-7 цилиндрической формы рабочей жидкости - магнитореологической суспензии 126 под действием накладываемого на нее внешнего магнитного поля в магнитореологических дросселях 49-56 и связанного с этим наложением перераспределения величин давлений в камерах 39-46 высокого давления гидростатических направляющих цилиндрической формы, приводящего к соответствующему изменению величин радиальных кольцевых дросселирующих каналов 48 и, следовательно, к параллельному перемещению или наклону нижней каретки 2 и верхней каретки 3 координатного стола. Например, юстировочное перемещение вдоль оси Y (фиг.1) может осуществляться только за счет изменения величины радиального кольцевого дросселирующего канала 48, расположенного между гооризонтальными камерами 43-46 (фиг.6) высокого давления и камерами 47 низкого давления гидростатических направляющих 4,5 цилиндрической формы. Юстировочный разворот вокруг оси Y (фиг.1) осуществляется за счет изменения величины радиального кольцевого дросселирующего канала 48, расположенного между вертикальными камерами 39-42 (фиг.2) высокого давления и камерами 47 низкого давления гидростатических направляющих 4,5 цилиндрической формы. Аналогично, изменяя соответствующие величины радиальных кольцевых дросселирующих каналов 48 гидростатических направляющих 6,7 цилиндрической формы, можно осуществить прецизионные перемещения вдоль и разворот вокруг пространственных осей X,Y,Z. В качестве примера рассмотрим процесс "точного" позиционирования координатного стола в плоскости ZOY (фиг. 1) и работу при этом гидростатической направляющей 6 цилиндрической формы. Гидростатическая направляющая 7 при этом должна работать аналогично.
Пусть, например, необходимо переместить верхнюю каретку 3 вверх по оси Z и повернуть вокруг оси Х. С шестикоординатного лазерного интерферометра, постоянно контролирующего пространственное положение координатного стола, текущие координаты (X,Y,Z, αx,αy,αz ) поступают в виде аналоговых сигналов с его фотоприемников в электронный блок начальной обработки информации, где они преобразуются в цифровой код и сравниваются с заданными программно цифровыми кодами координат координатного стола, т.е. в рассматриваемом случае цифровые коды поступают из системы 27 измерения перемещения координатного стола по координатам Z и αx, сравниваются в системе 26 управления направляющими координатного стола с заданными программно цифровыми кодами координат Z' и αx′, и определяется величина и знак рассогласования координат ( ΔZ = Z' = Z; Δαx=αx′-αx ). После сравнения в системе 26 управления направляющими координатного стола полученные цифровые коды ΔZ и Δαxрассогласований координат с учетом знаков являются одновременно цифровыми кодами управляющих воздействий, которые в соответствии с алгоритмом управления направляющими должны быть поданы в виде преобразованных токовых аналоговых сигналов на соответствующие индукторы 129 магнитного поля магнитореологических дросселей 49-56 гидростатических направляющих 6,7. В рассматриваемом случае Δ Z = (Z' - Z) > 0 и Δαx=(αx′-αx)>0 , следовательно эквивалентные им управляющие воздействия - UΔz и U , а управляющие сигналы при этом следующие: U1 = Uz - UΔz ; U2 = Uz + UΔz U3=U
, а управляющие сигналы при этом следующие: U1 = Uz - UΔz ; U2 = Uz + UΔz U3=U -U
-U ; U4=U
; U4=U +U
+U . Управляющие сигналы U1, U2, U3,U4 вырабатываются цифроаналоговыми преобразователями. Преобразованные управляющие сигналы U1...U4 в соответствующие управляющие токовые сигналы I1. . .I4 подаются на индуктор 129 магнитного поля магнитореологических дросселей 49-56. Наложение магнитного поля на рабочую жидкость - магнитореологическую суспензию 126, протекающую через магнитореологические дроссели 49-56 по цилиндрическому кольцевому дросселирующему каналу 133, приводит к повышению ее динамической вязкости, а следовательно, к увеличению гидравлического сопротивления магнитореологического дросселя (см.формулу (1)). В результате возрастает перепад давления Δ РМРД (см.формулу (2)) на магнитореологическом дросселе, что позволяет регулировать давление в камерах 39-46 высокого давления. В результате подачи управляющих токовых сигналов I1 на магнитореологические дроссели 49,51, а I2 на магнитореологические дроссели 50,52 в соответствующих камерах 39,41 высокого давления величина давления возрастает, а в камерах 40,42 - давление уменьшается, что вызывает перемещение верхней каретки 3 вверх по оси Z.
. Управляющие сигналы U1, U2, U3,U4 вырабатываются цифроаналоговыми преобразователями. Преобразованные управляющие сигналы U1...U4 в соответствующие управляющие токовые сигналы I1. . .I4 подаются на индуктор 129 магнитного поля магнитореологических дросселей 49-56. Наложение магнитного поля на рабочую жидкость - магнитореологическую суспензию 126, протекающую через магнитореологические дроссели 49-56 по цилиндрическому кольцевому дросселирующему каналу 133, приводит к повышению ее динамической вязкости, а следовательно, к увеличению гидравлического сопротивления магнитореологического дросселя (см.формулу (1)). В результате возрастает перепад давления Δ РМРД (см.формулу (2)) на магнитореологическом дросселе, что позволяет регулировать давление в камерах 39-46 высокого давления. В результате подачи управляющих токовых сигналов I1 на магнитореологические дроссели 49,51, а I2 на магнитореологические дроссели 50,52 в соответствующих камерах 39,41 высокого давления величина давления возрастает, а в камерах 40,42 - давление уменьшается, что вызывает перемещение верхней каретки 3 вверх по оси Z.
В результате этого возникают подъемные силы из-за разности давлений в вертикальных камерах 39,40,41,42 высокого давления гидростатических направляющих цилиндрической формы. Вследствие этого корпуса 29, жестко соединенные с верхней кареткой 3, перемещаются в направлении оси Z. В результате подачи управляющих токовых сигналов I3 на магнитореологические дроссели 50,51, а I4 на магнитореологические дроссели 49,52 в соответствующих камерах 40,41 высокого давления величина давления возрастает, а в камерах 39,42 давление уменьшается, что вызывает угловой поворот верхней каретки 3 вокруг оси Х.
Вследствие такого перераспределения давлений возникает подъемная сила из-за разности давлений в вертикальных камерах 41,42 высокого давления и опускающая сила из-за разности давлений в вертикальных камерах 39,40 высокого давления, что заставляет корпуса 29, жестко соединенные с верхней кареткой 3, разворачиваться вокруг оси Х. Верхняя каретка 3 перемещается таким образом, пока цифровые коды ΔZ и Δαxрассогласования координат станут равны нулю. В рассматриваемом примере юстировочного перемещения с помощью ступени "точного" позиционирования координатного стола в плоскости ZOY может произойти рассогласование текущих координат по оси Y, которое устраняется юстировочным перемещением, осуществляемым гидростатическими направляющими 4,5 цилиндрической формы, работающими аналогично, только в этом случае перераспределение давлений происходит в горизонтальных камерах 43-46 высокого давления. Таким образом можно осуществлять непрерывные юстировочные перемещения по шести координатам - X,Y,Z, αx,αy,αz .
Четыре пары соосно расположенных гидропередаточных узлов 12 и 13, 14 и 15, 16 и 17, 18 и 19 введены для того, чтобы исключить развороты кареток на гидростатических направляющих 4,5,6,7, возникающие от различных по величине рабочих давлений в корпусах 69 гидродвигателей 8,9,10,11, а также в корпусах 84 гидропередаточных узлов 12,13,14,15,16,17,18,19. Координатный стол за счет небольшой радиальной жесткости используемых перекатывающихся эластичных герметизирующих элементов 64,77,89 в виде тонкостенных оболочек в форме тел вращения разгружен от сил сопротивления перемещению. Тонкостенная оболочка под действием давления рабочей жидкости прижимается к охватывающим ее цилиндрическим поверхностям стаканов 30,76,87, стержня 35 и толкателей 74 и 88. Вследствие этого внутренняя и наружные поверхности оболочки в процессе перемещения координатного стола не испытывают трения. Для повышения быстродействия, надежности герметизирующие элементы 64,77,89 в виде тонкостенных оболочек в форме тел вращения могут быть армированы в осевом направлении, например, нитями из стекловолокна, что значительно увеличивает их осевую жесткость и нагружаемость давлением. Благодаря использованию гидропередаточных узлов 12-19 реализуется подвижный, но одновременно жесткий (почти упруго не деформируемый) трубопровод для подвода рабочей жидкости - магнитореологической суспензии 126 к гидродвигателям 8,9 и гидростатическим направляющим 6,7 цилиндрической формы, установленным на подвижной нижней каретке 2. Вследствие этого не требуется затрат времени на создание дополнительного расхода на компенсацию упругого деформирования стенок трубопроводов (как, например, это имеет место у резиновых шлангов), что значительно увеличивает быстродействие привода, а следовательно, и координатного стола в целом, кроме того, не вносит каких-либо нежелательных возмущающих воздействий (вибраций и т.д.) на подвижные каретки при резком изменении рабочих давлений в трубопроводах. Суммарный коэффициент сжимаемости трубопровода и рабочей жидкости, находящейся в трубопроводе и полостях гидродвигателей, имеет вид
Cсж.тр= fтр·L +
+  +
+  (3)
(3)
где fтр - площадь проходного сечения трубопровода;
dтр - внутренний диаметр трубопровода;
Lтр - суммарная длина соединительного трубопровода;
Етр - модуль упругости материала трубопровода;
Fтр - площадь толкателей гидродвигателей;
αтр - толщина стенки трубопровода;
h - ход толкателя гидродвигателя;
Еж. - объемный модуль упругости рабочей жидкости.
Потери расхода на компенсацию упругого деформирования трубопровода и рабочей жидкости в полостях гидродвигателей
Qсж.тр= Cсж.тр·  (4) где Δ Р - перепад давления на толкателях гидродвигателя;
(4) где Δ Р - перепад давления на толкателях гидродвигателя;
t - время.
Требуемый расход рабочей жидкости
Qп= Fт·  + Qсж.тр+Qсж.об.+Qут (5) где Х - перемещение толкателей;
+ Qсж.тр+Qсж.об.+Qут (5) где Х - перемещение толкателей;
Qсж.об - потери расхода на компенсацию осевого упругого деформирования герметизирующего эластичного элемента (тонкостенная оболочка);
Qут - потери расхода на компенсацию утечек рабочей жидкости (равны нулю, так как утечек нет и полная герметизация).
Таким образом, согласно формуле (3) чем меньше значение коэффициента сжимаемости трубопровода, тем возможно допускать большее значение градиента нарастания перепада давления на толкателях гидродвигателей, т.е. осуществить создание требуемого перепада давления для перемещения гидродвигателей за более короткое время t и тем самым повысить быстродействие координатного стола. Кроме того, вследствие значительного уменьшения (практически до нуля) сил сопротивления перемещению координатного стола, возникающих в результате работы герметизирующих эластичных элементов, значительно уменьшается зона нечувствительности координатного стола:
δт=  =
=  (6) где Iтр.дв - ток трогания гидродвигателя или гидростатической направляющей, подаваемый на соответствующие магнитореологические дроссели координатного стола;
(6) где Iтр.дв - ток трогания гидродвигателя или гидростатической направляющей, подаваемый на соответствующие магнитореологические дроссели координатного стола;
(Кд˙Ку) - коэффициент усиления системы измерения положения координатного стола;
Кд - коэффициент передачи датчика положения координатного стола;
Ку - коэффициент усиления измерительного усилителя;
Тнапр - сила трения в направляющих координатного стола;
Тг - сила сопротивления, возникающая от герметизирующих элементов привода и гидростатических направляющих координатного стола;
Тсопр - сила сопротивлению перемещению координатного стола, возникающая от воздействия атмосферного давления на герметизирующие элементы привода и гидростатических направляющих, веса стола и т.д.
Следовательно, согласно формуле (6) повышается точность позиционирования. Кроме того, быстродействие и надежность обеспечиваются отсутствием в магнитореологическом распределителе и магнитореологических дросселях подвижных инерционных элементов, например, мембран, золотников, пружин, якорей электромагнитов и т.д., требующих затрат времени на их срабатывание. Благодаря использованию магнитореологических дросселей расширяется диапазон регулирования рабочих давлений в камерах 39-46 гидростатических направляющих, что расширяет функциональные возможности координатного стола, а именно повышает грузоподъемность.
Магнитореологические дроссели 49-56, 101-104 (фиг.16, 17, 18) работают следующим образом.
Рабочая жидкость - магнитореологическая суспензия 126 под определенным давлением поступает к цилиндрическому кольцевому дросселирующему каналу 133, проходит его и поступает в гидролинию подключаемого гидроаппарата. Проходя через цилиндрический кольцевой дросселирующий канал 133, рабочая жидкость испытывает сопротивление своему движению, так как градиентные силы магнитного поля противодействуют силе сдвигового течения, возникающей от перепада давления на магнитореологическом дросселе. При этом, регулируя величину силы тока, питающего индуктор 129 магнитного поля в пределах пропорционального участка кривой намагничивания рабочей жидкости - магнитореологической суспензии 126, можно управлять сопротивлением протеканию жидкости и тем самым величиной ее расхода через магнитореологический дроссель или перепадом давления на нем. При протекании рабочей жидкости вдоль оси кольцевого дросселирующего канала в результате наличия на цилиндрической полюсной проставке 131 или полюсной шайбе 132 магнитопровода, образующих цилиндрический кольцевой дросселирующий канал 133, зубцов 134 (концентраторов магнитного поля) появляется ряд зон с повышенной величиной градиента магнитного поля. Кроме того, за счет градиентных сил магнитное поле между зубцами искривляется. Благодаря наличию зубцов в кольцевом зазоре создаются градиентные силы магнитного поля, позволяющие более эффективно, т. е. с меньшими энергозатратами, воздействовать на ферромагнитные частицы магнитореологической суспензии 126. Впадины зубцов 134 заполнены диамагнитным материалом, что предотвращает забивание впадин ферромагнитными частицами и обеспечивает сохранение большого диапазона регулирования перепада давления на магнитореологическом дросселе в процессе его работы, т.е. повышает надежность работы координатного стола в целом, увеличивает грузоподъемность гидростатических направляющих цилиндрической формы.
Для еще большего расширения диапазона регулирования давления в камерах высокого давления, а следовательно, повышения грузоподъемности гидростатических направляющих цилиндрической формы цилиндрическая полюсная проставка 139 (фиг.17) магнитореологического дросселя выполнена тонкостенной из ферромагнитного эластичного материала. Это позволяет при изменении тока в индукторе 129 магнитного поля изменять величину цилиндрического кольцевого дросселирующего канала 133 от максимального значения при нулевом токе до минимального при максимальном токе. При этом упругость полюсной цилиндрической проставки 139 подбирается таким образом, чтобы при максимально возможном изменении тока в индукторе 129 магнитного поля рабочая жидкость - магнитореологическая суспензия 126 находилась в состоянии, близком к магнитному насыщению. Таким образом, возможно дополнительное увеличение диапазона регулирования перепада давлений на магнитореологическом дросселе при постоянном расходе через него путем широкого изменения величины цилиндрического кольцевого дросселирующего канала 133:
ΔPмрд(I) = Pн-P(I) =  ·
· 
При внезапном возрастании давления или расхода на входе магнитореологического дросселя, например, при возникновении каких-либо неполадок в работе насосной станции 22, 23, 24 увеличивается мгновенное значение давления, которое воздействует на внутреннюю поверхность тонкостенной цилиндрической полюсной проставки 139. Вследствие расклинивающего воздействия со стороны рабочей жидкости происходит уменьшение величины цилиндрического кольцевого дросселирующего канала 133 и пропорциональное этому уменьшение расхода через магнитореологический дроссель. Кроме того, воздействие магнитного поля на рабочую жидкость при этом возрастает и, следовательно, расход через магнитореологический дроссель еще больше уменьшается, т.е. происходит стабилизация расхода через магнитореологический дроссель. Надежность магнитореологического дросселя, а следовательно, и координатного стола в целом повышается вследствие стабилизации расходных характеристик магнитореологического дросселя. Для расширения функциональных возможностей координатного стола и повышения его надежности в полюсной шайбе 141 (фиг.18) установлена перегородка 143 из ферромагнитного материала с упорами 144 из диамагнитного материала, а в тонкостенной цилиндрической полюсной проставке 139 из эластичного ферромагнитного материала - перегородка 142 из ферромагнитного материала, что позволяет при изменении тока в индукторе 129 магнитного поля тонкостенной центральной части полюсной цилиндрической проставки 139 изменять длину цилиндрического кольцевого дросселирующего канала 133 в направлении течения рабочей жидкости от минимального значения при нулевом токе до максимального при максимальном. При этом радиальные размеры цилиндрического кольцевого дросселирующего канала 133 не изменяются и подобраны таким образом, чтобы рабочая жидкость - магнитореологическая суспензия 126 при максимально возможном изменении тока в индукторе 129 находилась в насыщенном состоянии. Таким образом, возможно дополнительное увеличение диапазона регулирования перепада давления на магнитореологическом дросселе путем широкого изменения длины цилиндрического кольцевого дросселирующего канала 133:
ΔPМРД(I) = Pн-P(I) =  · μ(I)·l(I)
· μ(I)·l(I)
При максимальном токе в индукторе 129 магнитного поля тонкостенная цилиндрическая полюсная проставка 139 с установленной в ней перегородкой 142 прижимается к упорам 144 из диамагнитного материала, установленным на перегородке 143. Установка упоров 144 из диамагнитного материала позволяет избежать соприкосновения отдельных частей магнитопровода и замыкания всего магнитного потока только через перегородку 143 полюсной шайбы 141 и перегородку 142, установленную в торцовой части тонкостенной цилиндрической полюсной проставки 139 (т.е. минуя цилиндрический кольцевой дросселирующий канал 133). Замыкание магнитного потока приводит к прекращению какого-либо регулирования перепада давления на магнитореологическом дросселе и тем самым к снижению надежности магнитореологического дросселя, а следовательно, и координатного стола в целом. Увеличение диапазона регулирования магнитореологического дросселя позволяет создать большую разность давлений в камерах 39-46 (фиг. 1,2,6) высокого давления гидростатических направляющих 4-7 цилиндрической формы, что позволяет повысить их грузоподъемность, т.е. вес перемещаемого объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидростатическая направляющая цилиндрической формы | 1990 |
|
SU1774090A1 |
| МАГНИТОРЕОЛОГИЧЕСКАЯ ПОЗИЦИОНИРУЮЩАЯ И ВИБРОИЗОЛИРУЮЩАЯ СИСТЕМА | 2010 |
|
RU2443911C1 |
| УСТРОЙСТВО ДЛЯ СПУСКА КАБЕЛЯ В СКВАЖИНУ | 2000 |
|
RU2186194C2 |
| УСТРОЙСТВО ДЛЯ ЩЕЛЕВОЙ ПЕРФОРАЦИИ ОБСАЖЕННОЙ СКВАЖИНЫ | 2011 |
|
RU2473789C1 |
| МАГНИТОРЕОЛОГИЧЕСКИЙ ПРИВОД ПРЯМОГО ЭЛЕКТРОМАГНИТНОГО УПРАВЛЕНИЯ ХАРАКТЕРИСТИКАМИ ПОТОКА ВЕРХНЕГО КОНТУРА ГИДРАВЛИЧЕСКОЙ СИСТЕМЫ С ГИДРАВЛИЧЕСКИМ МОСТИКОМ (ВАРИАНТЫ) | 2014 |
|
RU2634166C2 |
| Гидравлический привод | 1987 |
|
SU1439293A1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ГЕРМЕТИЧНОСТИ НЕПОДВИЖНЫХ РАЗЪЕМНЫХ СОЕДИНЕНИЙ | 2012 |
|
RU2504705C2 |
| Магнитореологический регулятор расхода | 1981 |
|
SU962867A1 |
| АГРЕГАТ ФРОНТАЛЬНЫЙ ДОЛИНСКОГО АФД, ИСПОЛНИТЕЛЬНЫЙ ОРГАН (ВАРИАНТЫ), ЦЕПЬ КОЛЬЦЕВАЯ, СТАВ АГРЕГАТА, МЕХАНИЗМ РЕГУЛИРОВАНИЯ ПО ГИПСОМЕТРИИ, СЕКЦИИ КРЕПИ, ПЕРЕКРЫТИЕ, КРЕПЬ ВАНДРУТНАЯ, ТРАНСПОРТНОЕ ОБОРУДОВАНИЕ, ПЕРЕГРУЖАТЕЛЬ (ВАРИАНТЫ), ГИДРОДВИГАТЕЛЬ ДЛЯ ЭМУЛЬСИИ, СРЕДСТВО УПРАВЛЕНИЯ, СРЕДСТВО КОНТРОЛЯ ГРАНИЦЫ "УГОЛЬ-ПОРОДА", СПОСОБЫ МОНТАЖА И САМОМОНТАЖА | 1996 |
|
RU2114996C1 |
| ОБКАТНЫЙ БЛОК | 1990 |
|
RU2037390C1 |
Использование: в машиностроении, в установках ионной, электронной, ренгеновской и фотолитографии, в конструкциях различных микроскопов, координантно-измерительных машин. Сущность изобретения: координантный стол снабжен гидростатическими направляющими цилиндрической формы, каждая из которых снабжена двумя гидростатическими опорами, расположенными на базовом расстоянии друг от друга, каждая из которых состоит из двух расположенных в вертикальной плоскости и двух расположенных в горизонтальной плоскости камер высокого давления. Каждая из камер высокого давления гидравлически соединена с насосной станцией через магнитореологический дроссель, причем вокруг каждой камеры высокого давления расположены камеры низкого давления. С целью повышения точности позиционирования, надежности и быстродействия гидростатические направляющие цилиндрической формы уплотнены герметизирующими элементами, выполненными в виде эластичных тонкостенных оболочек в форме тел вращения, установленных с возможностью перекатывания между гидростатической направляющей цилиндрической формы и соответствующей кареткой. Магнитореологические дроссели выполнены в виде индуктора магнитного поля. 7 з.п. ф-лы, 18 ил.
| Bull.Japan Soc.of Prec | |||
| Engg., Vol.18, N 3, (Sept.1984), p.267-273. |
