Изобретение относится к горной промышленности и предназначено для подземной разработки угольных и других пластовых месторождений.
В настоящее время преобладающей технологией подземной угледобычи является узкозахватная технология выемки с применением очистных комплексов оборудования. Углубленный анализ этой технологии показывает, что она в значительной мере исчерпала свои возможности.
Представителем наиболее перспективного направления механизации добычи угля является фронтальный агрегат типа А-3 (АК-3) предназначенный для высокоэффективной отбойки, транспортировки угля одновременно со всей открытой поверхности очистного забоя, крепления и управления всеми операциями в лаве без постоянного присутствия людей в очистном забое (а.с. СССР N 693027, кл. E 21 D 23/00, 1979).
К недостаткам фронтального агрегата типа А-3 (АК-3) следует отнести нерешенную проблему транспортировки угля в длинных забоях, что связано с тем, что цепь исполнительного органа расположена с завальной стороны транспортного желоба и вылет резцов в сторону забоя ограничен по условиям КПД резцовой каретки, что снижает производительность транспорта и погрузки угля. Именно это обстоятельство привело к созданию агрегата для крутого падения, где транспорт идет самотеком.
Наиболее близким аналогом для предлагаемого агрегата является фронтальный агрегат, включающий кольцевой отбойно-доставочный исполнительный орган, состоящий из кольцевой цепи с резцами с скребками и приводов, став с нижними и верхними забойными направляющими, секции механизированной крепи, связанные со ставом домкратами передвижения, транспортное оборудование, содержащее перегружатель, лавное и штрековое оборудование, крепи сопряжений лавы со штреками, средства управления и контроля движения агрегата по гипсометрии пласта. (журнал "Техника молодежи" N 8, 1982, с. 30-35).
Недостатком аналогов типа АК-3 является то обстоятельство, что на действующих участках не созданы условия реализации высокой технической производительности исполнительного органа по отбойке угля и по возможной скорости крепления кровли при фронтальной передвижке трех групп крепи.
Кроме того, суммарная эффективность применения агрегатной выемки требует учесть и то, что монтажные работы при переходе агрегата из одной лавы в другую требуют существенных трудозатрат и сопряжены с потерей производительного времени.
Наиболее близким аналогом исполнительного органа является исполнительный орган фронтального агрегата, содержащий цепь с резцами и скребками, концевые привода с приводными звездочками и шестернями, взаимодействующими с электроприводами (журнал "Техника молодежи" N 8, 1982, с. 30-35).
Недостатком является ограниченность его мощности вследствие того, что из-за ограниченности пространства, требующего увеличения зоны поддержания кровли и сдвига крайних секций крепи, все зубчатые передачи редуктора выполнены недостаточного размера с применением конических передач из-за необходимости располагать электродвигатели вдоль забоя, при расположении звезды перпендикулярно забою.
Недостатком такого варианта приводной звезды является также то обстоятельство, что она не обеспечивает разрушение забоя против концов агрегата, что технологически сужает возможности использования агрегата в коротких забоях без предварительного проведения штреков или ниш, а наличие электропривода звезды ограничивает ее диаметр, определяемый оборотами электродвигателя и передаточным отношением редуктора.
Кроме того, недостатком является применение электроэнергии в лаве, что недопустимо в условиях выемки угольных пластов повышенной газо и пожароопасности. При этом в случае нарушенных пластов или при отработке межлавных целиков переменной ширины необходимо отрабатывать без штреков и размещение концевых приводов становится невозможным.
Из того же источника известны резцы исполнительного органа которые расположены на резцовых каретках с забойной стороны от цепи и от направляющих, по которым каретки двигаются на опорах скольжения от одной звезды до другой, а в зоне звезды каретки выходят из направляющих, разворачиваются и по выходе со звезды снова должны попадать на верхние направляющие.
Недостатком является снижение КПД каретки из-за неуравновешенности кареток с боковым присоединением резцов, скребков к тяговой цепи и из-за применения пар скольжения, снижение надежности и безотказности разворота кареток и невозможность активной работы резцов в зоне звезды.
Известен также став фронтального агрегата, который включает базу с нижними и верхними направляющими исполнительного органа, опирающуюся на почву пласта посредством забойных и завальных лыж и передвигаемую с помощью двигательных домкратов крепи, и включает средства регулирования и крепления направляющих, обеспечивающие воспринятие реакций от резания угля, отбойку постоянной мощности пласта независимо от фактического положения перекрытий.
Недостатком является повышенная металлоемкость става из-за необходимости иметь тяжелые и высоконагруженные передние стенки для крепления верхних направляющих на нижнем ставе, что создает большие изгибающие нагрузки на эти стенки от сил резания. Вторым недостатком става является его изгибаемость по гипсометрии пласта только в зоне почвы, что требует телескопической конструкции направляющих и боковой раздвижности перекрытий крепи.
Из описания того же агрегата известен механизм регулирования фронтального агрегата, который включает гидромеханизмы перемещения нижних направляющих исполнительного органа, по которым движутся резцовые каретки, связанные с кольцевой цепью исполнительного органа.
Недостатком является сложность механизма управления из-за необходимости иметь на каждой секции гидроблока для управления данным гидромеханизмом и необходимость применения сложной многоканальной системы дистанционного или автоматического управления всеми гидроблоками.
Секции механизированной крепи фронтального агрегата, являющегося наиболее близким аналогом, включают продольные домкраты передвижения, обеспечивающие связь со ставом в направлении подвигания агрегата, гидростойки с башмаками, обеспечивающие распор крепи, а также связь крепи со ставом в направлении падения пласта.
Недостатком является отсутствие возможности удержания непосредственно перекрытий при работе на наклонных и крутых пластах с передачей на став боковых усилий от перекрытия крепи, невозможность регулируемого прижатия става при выемке угля, невозможность поддержания кровли со стороны става при длительных паузах в работе или в нерабочее время.
Из того же источника известно перекрытие крепи фронтального агрегата, включающее корпус, к которому присоединен верхний домкрат передвижения и опоры стоек а также шарниры для присоединения перекрытия к остальным элементам секции крепи.
Недостатком является невозможность подхвата вновь обнажаемой полосы кровли при фронтальном подвигании става с исполнительным органом.
В том же агрегате имеется зандрутная крепь сопряжения фронтального агрегата, которая включает секции, соединенные между собой в цепочку, расположенные в зоне выхода агрегата в штрек и воспринимающие на себя нагрузку от всех стоек штрека, выбиваемых в зоне прохода агрегата с передачей этих нагрузок на почву штрека.
Недостатком является необходимость разгрузки секций при их передвижке в направлении подвигания забоя с последующим распором и с перехватом рам штрековой крепи второй параллельной цепочкой секций, а также нерешенность механизации операций по выбивке призабойных стоек штрековой крепи и установке их при сохранении штрека.
Забойное транспортное оборудование фронтального агрегата, являющегося наиболее близким аналогом, включает пластинчатую цепь с резцами и скребками рассредоточенными по всей длине забоя и став образующий транспортный желоб.
Недостатком является расположение резцов и скребков только с забойной стороны цепи, что лимитирует ширину транспортного желоба из-за условий резания когда увеличение вылета резцов приводит к снижению КПД резцовых кареток. В результате работоспособность агрегата подтверждена только для крутых пластов когда уголь транспортируется в основном самотеком.
Перегружатель фронтального агрегата, являющийся наиболее близким аналогом, включает укороченный серийный скребковый конвейер повышенной скорости и производительности, перемещаемый по почве штрека в своей линейной части и наезжающий своей стреловой частью на штрековый конвейер и включающий устройство для одновременного перемещения насосных станций, привода орошения, электрооборудования составляющих энергопоезд.
Недостатком является чрезмерная длина перегружателя вместе с энергопоездом, расположенным с последовательным порядком размещения стреловой части и энергопоезда, что не позволяет дорабатывать выемочный столб до размера 20-30 м соответствующего охранному целику у откаточного штрека.
Перегружатель фронтального агрегата, наиболее близким являющегося аналогом включает укороченный серийный скребковый конвейер, перемещаемый по почве штрека в своей линейной части и наезжающий своей стреловой частью на штрековый конвейер и включающий устройство для одновременного перемещения энергопоезда.
Известен также гидродвигатель большого момента, который включает радиально расположенные поршни ротора с роликами, обкатывающими дуговые профили статора, питающиеся от радиально расположенного золотника, связанного со статором (Башта Б.М., Машиностроительная гидравлика, М., Гостехиздат, 1963, с. 154-158).
Недостатком прототипа является невозможность использования в качестве рабочей жидкости водомасляной эмульсии, т.к. коммутация гидропитания посредством радиального расположенного коллектора, обязанного иметь радиальные зазоры в пределах допусков ходовых посадок, требует применения достаточно вязких минеральных масел.
Известно средство управления движением агрегата, включающее механизмы перемещения направляющих исполнительного органа, по которым движутся резцовые каретки с почвенными резцами, приводимые в движение кольцевой пластинчатой цепью, взаимодействующей с зубьями приводной звезды (а.с. N 968386, кл. E 21 C 27/00, 1982).
Недостатком является необходимость местного управления механизмами перемещения направляющих с помощью гидроблоков управления при местном определении фактического положения направляющей.
Известно средство контроля фактического положения агрегата относительно границы уголь-порода, включающее трубопровод, состоящий из жестких и гибких участков с тензометрическими датчиками изгиба в горизонтальной и вертикальной плоскости, размещаемый на ставе агрегата, и центральная ЭВМ, электрически связанная датчиками и экраном, отражающим конфигурацию става по результатам обработки сигналов датчиков по программе суммирования углов по типу маркшейдерского хода (а.с. N 1814687, кл. E 21 C 27/00, 1993).
Недостатком прототипа является малая точность результата особенно для положения става в вертикальной плоскости из-за накопления погрешностей угла при суммировании показаний тензометрических датчиков, что неприемлемо при переходе на пологое падение и длинные лавы.
Известен способ монтажа агрегата, включающий доставку отдельных секций и узлов агрегата по вентиляционному штреку, по верхней крепи сопряжения и по лаве с использованием транспортных и подъемных средств и направляющих на штреке, на крепи сопряжения с верхним штреком, направляющих в лаве и тележки подъемника в ходке агрегата (Крылов В.Ф. и др. Направления комплексной механизации разработки крутых и наклонных пластов, М., Недра, 1974, с. 174-182).
Недостатком является прерывный характер всех операций с промежуточными погрузо-разгрузочными операциями, с обязательным использованием вспомогательных монтажных механизмов, не используемых при работе агрегата по добыче.
Из того же источника известен способ монтажа, включающий разъединение линии на крайней секции, транспортировку этой секции вдоль линии и монтаж ее на другом конце линии.
Недостатком является трудоемкость монтажных работ по перемонтажу каждой секции и необходимость применения универсальных переносных устройств типа талей и средств транспорта грузов.
Детальное изучение суммарной эффективности применения агрегатов и комплексов привело к выводу об оценке новой техники с учетом эквивалентной добычи в сутки за весь период работы агрегата, количества выходов в сутки также с учетом монтажников, массы агрегата и всей используемой техники (или стоимости ее и горно-геологических условий, в основном мощность пласта, угол падения).
В результате была сформулирована задача о создании и комплектации агрегата всеми средствами транспорта от забоя до поверхности, комплектации агрегата органически привязанной к агрегату системы машин-роботов для монтажа и демонтажа агрегата на весь срок службы агрегата, полной механизации концевых операций.
Для решения поставленной задачи во фронтальном агрегате, включающем кольцевой отбойно-доставочный исполнительный орган, состоящий из кольцевой цепи с резцами и скребками и приводов, став с нижними и верхними забойными направляющими, секции механизированной крепи, связанные со ставом домкратами передвижения, транспортное оборудование, содержащее перегружатель, лавное и штрековое оборудование, крепи сопряжений лавы со штреками, средства управления и контроля движения агрегата по гипсометрии пласта, став агрегата содержит завальные направляющие, имеющие возможность перемещения в вертикальной плоскости с помощью механизмов регулирования, нижнюю и верхнюю базы, которые соединены соответственно с основанием и перекрытием крепи посредством нижних и верхних двигательных домкратов, работающих синхронно, средства управления и контроля движения агрегата по гипсометрии пласта выполнены в виде трубопровода, внутренняя полость которого заполнена жидкостью и датчиками гидростатического давления, рассредоточенными по длине лавы, и ЭВМ на центральном пункте, механизм управления на каждой секции става выполнен в виде плунжеров, подпружиненных в поршневой полости и с питанием штоковой полости управляющим давлением от одной для всех механизмов управления линии управления, гидравлическое давление в которую подается от имеющегося на центральном пульте управления регулятора в зависимости от положения по длине лавы почвенных резцов и в соответствии с программой, определенной оператором агрегата или прогнозом залегания пласта, выполненным с помощью центральной ЭВМ, крепь сопряжения лавы со штреками выполнена в виде вандрутной линии, снабженной направляющими, по которым перемещаются самоходные тележки с маникулятором, имеющим захват для извлечения и транспортировки призабойных стоек штрековой крепи, при этом привод самоходных тележек манипулятора осуществлен от гидродвигателя большого момента, работающего от эмульсии, применяемой в гидрокрепи агрегата, для чего коммутация рабочей жидкости радиально-поршневой группы гидродвигателя осуществляется сдвоенным плоским осевым золотником, а став агрегата с нижними и верхними направляющими передвигается синхронно на забой путем последовательного питания нижнего и верхнего домкратов при подаче става на забой и параллельного их питания при выдвижке крепи для обеспечения сброса ошибки при синхронной подаче верхнего и нижнего става на забой, причем переключение питания двух домкратов с последовательной схемы на параллельную осуществляется двухходовым золотником.
Кроме того, задачей изобретения является увеличение возможной приводной мощности привода и возможность использования серийных конвейерных приводов со своими редукторами, турбомуфтами и электродвигателями, освоенными промышленностью. Для ее решения предлагается исполнительный орган фронтального агрегата, содержащий цепь с резцами и скребками, концевые привода с приводными звездочками и шестернями, взаимодействующими с электроприводами, в которых редуктор привода имеет один вал со звездочкой и одну приводную шестерню, работающую одновременно несколькими, например тремя, зубьями, взаимодействующими с выходными шестернями трех серийных конвейерных приводов, прифланцованных к редуктору концентрично к оси вала и имеющих каждый свой электродвигатель и свою турбомуфту.
Изобретение направлено также на обеспечение работы агрегата в коротких забоях в целиках переменной ширины и повышение надежности разворота резцовых кареток.
Для этого исполнительный орган фронтального агрегата, содержащий цепь с резцами и скребками и концевые звездочки, имеет концевые звездочки без электропривода, что обеспечивает проход резцовых кареток с разрушением глухого забоя круговой формы и возможность работы агрегата без проведения вентиляционного трека, с оставлением и креплением его за агрегатом, в том числе по технологической схеме с повторным его использованием без предварительного прохождения подготовительных выработок.
Задачей изобретения является, кроме того, исключение применения электроприводов и обеспечение привода от гидроэнергии, имеющейся в крепи, в том числе обеспечение отработки пласта с глухим забоем на одном конце агрегата.
Для этого исполнительный орган фронтального агрегата, содержащий цепь с резцами и скребками, выполнен с приводом от гидродомкратов, расположенных позади верхней цепи в забойных цилиндрических направляющих и взаимодействующих с наружными пластинами цепи посредством поворотного кулака, поджимаемого к поверхности цепи, причем коммутация домкратов производится клапанами, взаимодействующими с кулаком таким образом, что при повороте кулака в сторону впадины цепи домкрат включается на раздвижку, а поворот кулака под действием наружной пластины цепи приводит к сокращению домкрата, при этом в первом случае усилие домкрата передается на цепь, а во втором случае производится сокращение домкрата и ожидание им подхода следующей впадины цепи.
Задачей следующего изобретения из группы является повышение КПД каретки, повышение надежности и безотказности разворота кареток на звездах при резании в круговом забое против звезды.
Для решения этой задачи резцы исполнительного органа, включающие установленные на цепи скребки, каретки для установки резцов с забойной стороны цепи, имеют каретки, выполненные с возможностью установки резцов и с завальной стороны цепи и, кроме того, имеют по два ролика, расположенных один вслед за другим вдоль задней завальной направляющей, выполненной на приводе в виде кольцевой конструкции в направлении принудительного разворота обоих роликов вокруг оси приводного вала со звездой.
Одно из изобретений группы направлено на облегчение и упрощение конструкции става и передачу его функции по восприятию реактивных сил со стороны забоя частично на крепь агрегата.
Для этого став агрегата, включающий базу с направляющими исполнительного органа, выполнен с двумя самостоятельно передвигаемыми базами с отдельными двигательными домкратами, с системой синхронного передвижения, причем нижняя база имеет продольные балки, жестко связанные со ставом и поднятые над почвой на высоту расчетной кривизны пласта с опорой на почву через две лыжи, расположенные под забойным концом става и на завальном конце балки, а верхняя база имеет продольную балку, расположенную ниже перекрытия крепи и связанную своим завальным концом с кулисой перекрытия секции крепи, перемещаемой в пазах крепи верхним двигательным домкратом, и связанную своей средней частью с нижней базой посредством двух забойных стоек, расположенных Л-образно с наклоном верхних концов друг к другу и соединенных с верхней продольной балкой и с нижней базой сферическими кинематическими парами, например, типа уключины, для обеспечения расчетного зазора от верхней базы до кровли и отбойку исполнительным органом постоянной мощности пласта независимо от фактического положения кровли и перекрытия цепи при запертых забойных стойках.
Еще одной задачей одного изобретения из группы является упрощение конструкции механизма управления и обеспечение дистанционного управления всеми механизмами в соответствии с заданной или контролируемой фактической гипсометрией пласта.
Механизм регулирования перемещения направляющей става агрегата в вертикальной плоскости содержит гидравлический плунжер с обратной пружиной, подключенной в одной общей для всех механизмов управляющей гидромагистрали, при этом почвенные резцы сгруппированы на кольцевой цепи исполнительного органа в одном месте на длине не более нескольких рядом стоящих секций для изменения уровня подрубки почвы только против упомянутых рядом стоящих секций при изменении давления в управляющей магистрали.
Следующей задачей является агрегатизация крепи и става для обеспечения повышения боковой устойчивости крепи и поддержания кровли с использованием става и стабилизацию става при выемке угля с использованием крепи.
Для ее решения секции механизированной крепи, включающие перекрытия и нижние домкраты передвижения, связывающие нижнюю базу става с основаниями, на которые оперты посадочные стойки, имеют верхнюю базу с кулисой, перемещаемой в пазах крепи совместно с козырьком, поджимными плунжерами и исполнительным органом и связанной с Л-образно расположенными стойками, концы которых соединены сферическими кинематическими парами с нижней и верхней базами.
Задачей изобретения является также обеспечение дополнительного подхвата полосы кровли у забоя независимо от фактического положения корпуса перекрытия и става по высоте.
Для ее решения перекрытие крепи включает выдвижной козырек, расположенный в выполненном в зоне над балкой верхней базы проеме, открытом вверх в сторону кровли и вниз, шарнирно соединенный своим завальным концом с балкой става и опирающийся в средней свой части на гидропатрон балки, причем консоль выдвижного козырька, выдвигающаяся совместно с балкой, имеет неизменный зазор порядка 50 мм до линии резания кровельного резца.
Задачей следующего изобретения группы является полная механизация всех операций на сопряжении агрегата со штреком и обеспечение качественного поддержания кровли штреков без "топтания" кровли независимо от прочности пород почвы в зоне сопряжения.
Для ее решения крепь сопряжения, состоящая из секций, соединенных между собой двумя продольными пальцами снабжена направляющими для возможности передвижения и пространственной опоры самоходных тележек с манипуляторами, при этом прочность поперечного профиля и прочность продольных пальцев выбирается из условий воспринятия полной нагрузки от всех стоек, выбиваемых в зоне выхода агрегата в штрек и передачи этих нагрузок на рамы штрековой крепи впереди забоя, где призабойные стойки еще не выбиты, и на рамы штрековой крепи позади агрегата, где призабойные стойки поставлены в процессе сохранения штрека, а операции по выбивке призабойных стоек, их транспортирования и установки выполняется манипулятором, установленным на стреле самоходной тележки при дистанционном управлении манипулятором с места расположенного рядом с манипулятором выносного гидропульта.
Следующей задачей является повышение эффективности забойного транспорта и расширение области применения агрегата на пологие пласты и длинные лавы.
Для ее решения лавное транспортное оборудование агрегата, включающее забойное транспортное устройство, связанное с пластинчатой цепью исполнительного органа с образованием транспортного желоба с забойной стороны цепи, где работают забойные резцы, имеет транспортный желоб и с завальной стороны, где располагаются при большой мощности пласта средние резцы, закрепленные на каретках, при этом перераспределение количества угля из одного желоба в другой в процессе транспорта осуществляется за счет диагонально расположенных скребков на нижней, на забойной и на верхней поверхностях цепи.
Кроме того, задачей изобретения является создание компоновки перегружателя совместно с энергопоездом, обеспечивающее непрерывное подвигание очистного забоя с возможностью доработки выемочного столба до минимального размера охранного целика у откаточного штрека.
Для решения этой задачи в перегружателе на базе серийного скребкового конвейера его загрузочная часть расположена ниже почвы забоя, а стреловая часть расположена над штрековым ленточным конвейером, перемещаясь самоходными тележками, расположенными в ряд сбоку ленточного конвейера и нагруженных машинами, составляющими энергопоезд, при этом направляющей для движения тележек служит труба, укладываемая отрезками прямо на почву, а движителями тележек являются спаренные двухребордные ролики, обжимающие эти направляющие и приводимые в движение с помощью гидродвигателей большого момента, работающих от давления рабочей эмульсии, применяемой в гидросистеме мехкрепи.
Задачей изобретения является также обеспечение непрерывного подвигания очистного забоя с возможностью доработки выемочного столба до минимального размера охранного целика у откаточного штрека.
Для ее решения в перегружателе на базе конвейера, включающем загрузочную и стреловую части, для перемещения стрелы перегружателя используются самоходные тележки, движущиеся по направляющим вандрутной крепи сопряжения, используемой для крепления сопряжения, воспринятия повышенного опорного горного давления, а также для движения монтажных манипуляторов для монтажных и вспомогательных работ.
Кроме того, задачей изобретения является расширение области применения радиально-поршневых гидродвигателей для шахтных условий в очистных забоях, где по условиях пожароопасности применяются только водомасляная эмульсия в качестве рабочей жидкости.
Для ее решения в гидродвигателе большого момента для подачи рабочей жидкости к радиально расположенным поршням ротора применен коллектор, состоящий из двух поджимных плоских осевых золотников, охватывающих осевые плоскости ротора с двух сторон и уравновешенных в осевом направлении.
Задачей изобретения является также обеспечение дистанционного управления всеми механизмами перемещения направляющих с дистанционным контролем их положения по программе, задаваемой машинистом агрегата или автоматической системой.
Для решения этой задачи средство управления движения агрегата по гипсометрии пласта выполнено в виде программатора, представляющего собой визуальный имитатор движения по длине лавы цепи исполнительного органа с почвенными резцами, который состоит из пластинчатой цепочки на пульте, приводимой в движение импульсами давления, получаемого по шлангу от клапана, взаимодействующего с кулаками на оси привода по числу зубьев звезды, звенья цепочки имеют винты, настраиваемые машинистом агрегата, которые взаимодействуют с лимбом регулятора давления, подаваемого в линию управления механизмами завальной направляющей в зависимости от фактического положения почвенных резцов по длине лавы и в зависимости от программы, задаваемой машинистом.
Еще одной задачей изобретения является увеличение точности определения конфигурации става в вертикальной плоскости при переходе на пологие пласты и длинные лавы и привязке фактической конфигурации става в вертикальной плоскости к конфигурации профиля пласта в вертикальной плоскости с визуальной и автоматической выработкой команд для управления программатором пульта управления.
Для ее решения средство контроля фактического положения агрегата относительно границы уголь - порода включает трубопровод, состоящий из жестких и гибких участков с тензометрическими датчиками изгиба в горизонтальной и вертикальной плоскости, внутренняя полость трубопровода заполнена жидкостью и датчиками гидростатического давления, рассредоточенными по длине лавы, а на центральном пульте управления имеется ЭВМ, выдающая на экран пульта положение става в абсолютной системе координат с отметками точек абсолютного положения границ пласта, прогнозируемого ЭВМ методом регрессии точек, визуально наблюдавшихся в ходке агрегата выходов пласта относительно става на предыдущих циклах подвигания агрегата и записанных в памяти ЭВМ в качестве объективных стационарных характеристик гипсометрии пласта в абсолютных координатах.
Кроме того, задачей изобретения является ускорение и облегчение монтажных работ за счет непрерывности транспортировки секций агрегата по штреку, по сопряжению и по монтажной камере и удешевление применяемого оборудования за счет его использования не только при монтаже агрегата, но и при эксплуатации агрегата.
Для решения этой задачи способ монтажа и демонтажа агрегата вандрутной крепью и самоходными тележками с манипуляторами включает при монтаже агрегата в монтажной камере самомонтаж вандрутной линии по штреку, по сопряжению и далее непрерывно по монтажной камере, при котором манипулятор оснащают дополнительно двумя "руками", которыми вместе с основной "рукой" захватывают каждую секцию за три точки, предусмотренные в конструкции секций и узлов, транспортируют эту секцию от штрека до места в лаве, кантуют и устанавливают секции в лаве, при этом бригадой ведут гидроразводку и отладку агрегата с последующим перебросом вандрутной линии в эксплуатационный режим на обоих штреках.
Задачей последнего изобретения группы является ускорение и облегчение самомонтажа вандрутной линии.
Для ее решения предлагается способ самомонтажа вандрутной линии, который осуществляют двумя самоходными тележками, связанными между собой гидроуправляемой "рукой" таким образом, что "руку" выставляют напротив продольных пальцев, соединяющих балки вандрутной линии, гидродвигатели тележек затормаживают, производят продольное перемещение крайней балки вандрута, которую после рассоединения отводят в сторону и транспортируют вдоль всей вандрутной линии на другой ее конец, где подмонтируют в обратной последовательности.
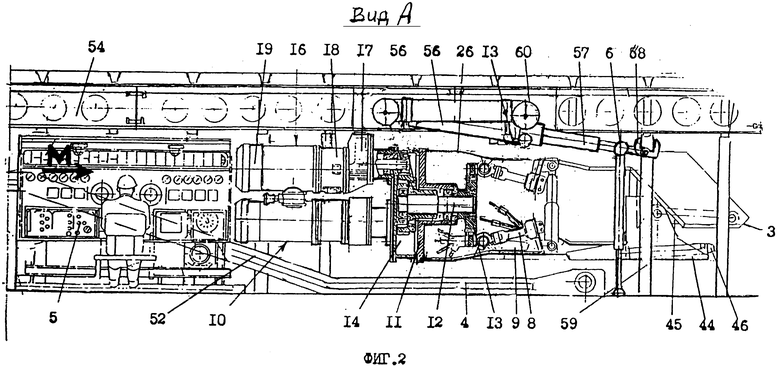
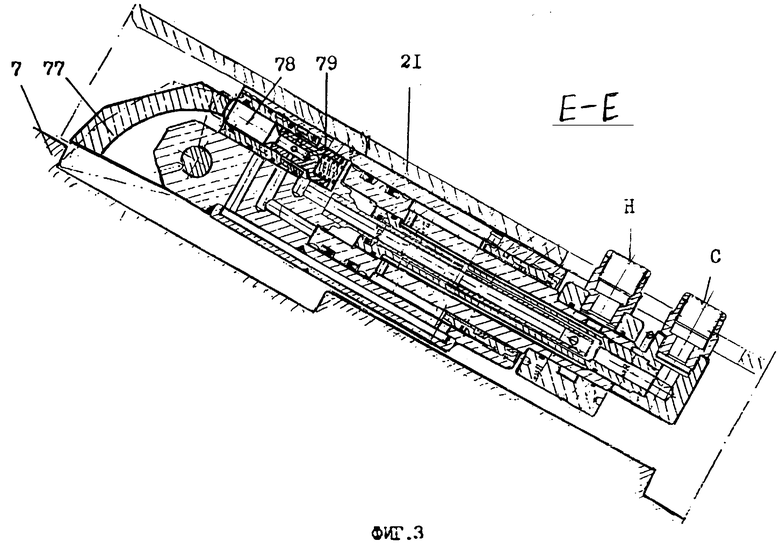
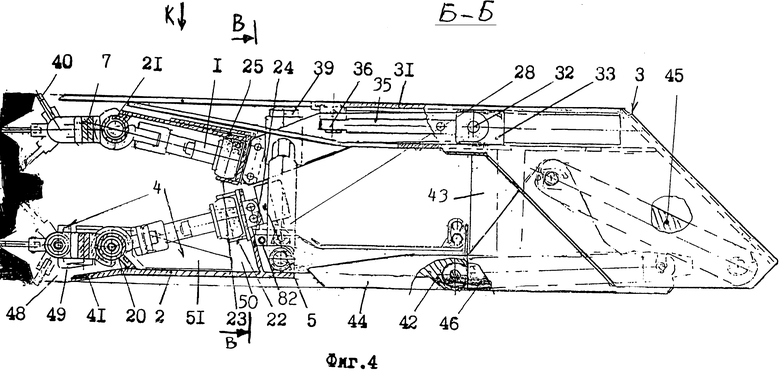
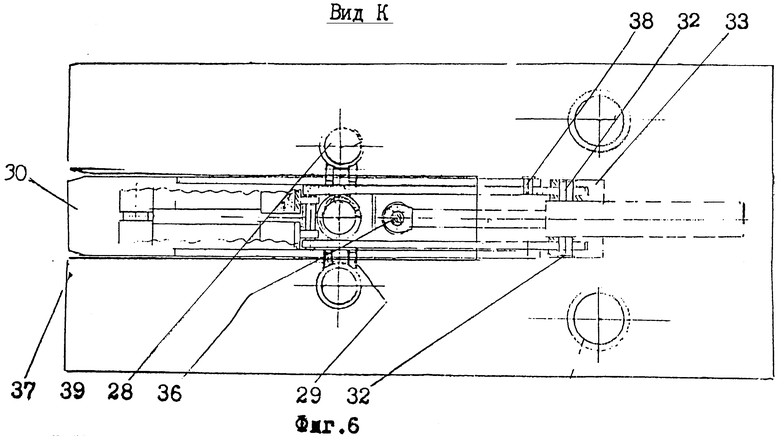
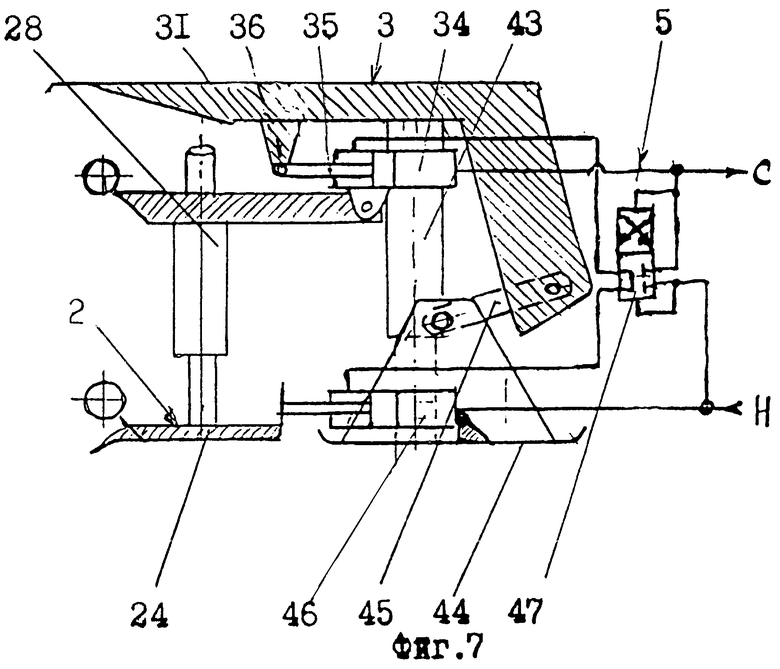
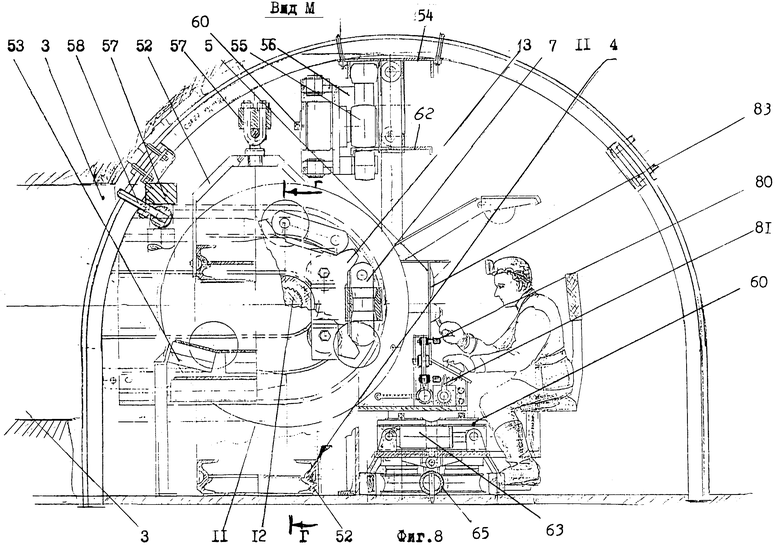
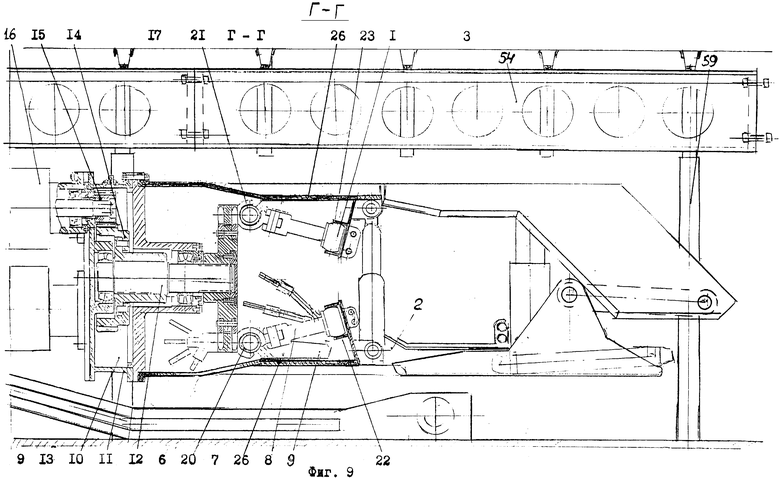
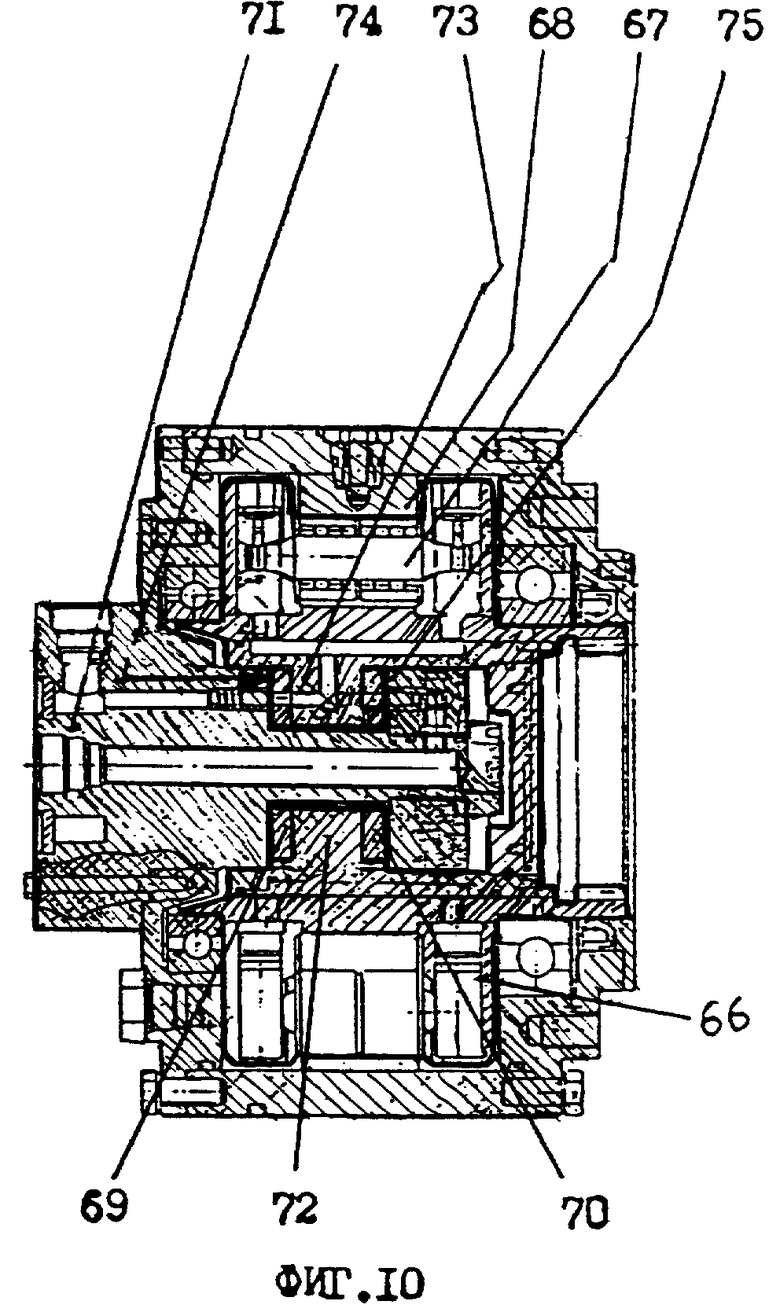
Группа изобретения поясняется чертежами, где общий вид агрегата представлен на фиг. 1, вид со стороны забоя; на фиг. 2 представлен конвейерный штрек с энергопоездом, вид А; на фиг. 3 - вариант привода цепи от гидродомкратного привода для газовых шахт (виг Е-Е) и для технологии без предварительного проведения выемочных штреков; на фиг. 4 - поперечное сечение по линейной части агрегата, сечение Б-Б; на фиг. 5 - сечение В-В; на фиг. 6 - вид секции в плане, вид К; на фиг. 7 - гидравлическая схема средств подачи става и выдвижки крепи; на фиг. 8 - совмещенное поперечное сечение конвейерного штрека, вид М; на фиг. 9 - сечение по приводной звездочке в сторону лавы, сечение Г-Г; на фиг. 10 - сечение по гидродвигателю большого момента с двухсторонним плоским коллектором, предназначенным для работы на эмульсии (на базе серийного гидромотора Людиновского завода).
Фронтальный агрегат нового технико-экономического уровня включает кольцевой отбойно-доставочный исполнительный орган 1, состоящий из кольцевой цепи 7 с резцами и скребками 9 и приводов, став 2 с нижними и верхними забойными направляющими 20 и 21, секции механизированной крепи 3, связанные со ставом домкратами передвижения, транспортное оборудование 4, содержащее перегружатель 52, лавное и штрековое оборудование, крепи 54 сопряжения лавы со штреками, средства управления 5 и средства контроля движения агрегата по гипсометрии пласта, вспомогательное оборудование 6 для механизации вспомогательных и трудоемких операций.
Став 24 агрегата содержит завальные направляющие 22, 23, имеющие возможность перемещения в вертикальной плоскости с помощью механизмов регулирования, нижнюю и верхнюю 25 базы, которые соединены соответственно с основанием и перекрытием 31 крепи посредством нижних и верхних двигательных домкратов, работающих синхронно. Средства управления 5 и контроля движения агрегата по гипсометрии пласта выполнены в виде трубопровода, внутренняя полость которого заполнена жидкостью и датчиками гидростатического давления, рассредоточенными по длине лавы, и ЭВМ на центральном пункте. Механизм регулирования на каждой секции става выполнен в виде подпружиненных плунжеров с питанием управляющим давлением от одной для всех механизмов регулирования линии управления, гидравлическое давление в которую подается от имеющегося на центральном пульте управления регулятора в зависимости от положения по длине лавы почвенных резцов и в соответствии с программой, определенной оператором агрегата или прогнозом залегания пласта, выполненным с помощью центральной ЭВМ. Крепь 54 сопряжения лавы со штреками выполнена в виде вандрутной линии, снабженной направляющими 62, по которым перемещаются самоходные тележки 55 с манипулятором 56, имеющим захват 58 для извлечения и транспортировки призабойных стоек 59 штрековой крепи. Привод самоходных тележек манипулятора осуществлен от гидродвигателя большого момента, работающего от эмульсии, применяемой в гидрокрепи агрегата, для чего коммутация рабочей жидкости радиально-поршневой группы гидродвигателя осуществляется сдвоенным плоским осевым золотником. Став агрегата с нижними и верхними направляющими 20, 21, 22, 23 передвигается синхронно на забой путем последовательного питания нижнего и верхнего домкратов при подаче става на забой и параллельного их питания при выдвижке крепи 3 для обеспечения сброса ошибки при синхронной передаче верхнего и нижнего става на забой. Переключение питания двух домкратов с последовательной схемы на параллельную осуществляется двухходовым золотником.
Исполнительный орган состоит из линейной части в виде цепи 7 с резцовыми каретками 8 и скребками 9 и концевых приводов 10, включающих корпус 11 и вал 12 с приводной звездочкой 13 и шестерней 14, с которой взаимодействуют выходные шестерни 15 серийных конвейерных приводов 16, имеющих в своем составе редуктора 17, турбомуфты 18, электродвигатели 19 во взрывоопасном исполнении. Направляющие исполнительного органа, цилиндрические 20 и 21 со стороны забоя и коробчатые 22 и 23 со стороны завала, крепятся на ставе 24 и верхней базе 25, а на приводе выполнены в виде общего криволинейного короба 26, прибалчиваемого к корпусу 11 привода 10.
Став 24 прижимается к почве забойными стойками 28, соединенными со ставом сферическими кинематическими парами в виде уключин 29, обеспечивающих компенсацию поворотов при передвижке става на забой или раздвижности крепи по мощности пласта. Аналогично выполнено крепление верхних концов забойных стоек 28 к выдвижной части 30 перекрытия 31 крепи 3.
Выдвижка этой части производится с помощью пальцев 32 кулисы 33, закрепленной к цилиндру верхнего домкрата 34. Шток 35 этого домкрата с помощью пальца 36 закреплен на перекрытии 31 таким образом, что выдвижка исполнительного органа на забой производится штоковой полостью верхнего домкрата при его сокращении. При этом одновременно выдвигается козырек 37, связанный с пальцами 38, а также поджимным плунжером 39 с выдвижной частью 30, что обеспечивает подхват призабойной полосы кровли сразу же после ее обработки кровельными резцами 40. Наклонное Л-образное положение стоек 28 обеспечивает совместную работу крепи и исполнительного органа, обеспечивая при отбойке угля не только прижатие става к почве, но и воспринятие крепью продольных сил резания вдоль очистного забоя. В то же время такое расположение забойных стоек при выдвижке крепи обеспечивает восприятие ставом боковых реакций от перекрытия крепи, что повышает ее боковую устойчивость на крутых и наклонных пластах.
Прижатие носка става к почве достигается за счет того, что став имеет две лыжи: носовую 41 и хвостовую 42 с клиренсом до почвы в пределах расчетной кривизны пласта. Посадочные стойки 43 крепи опираются на основания 44 крепи, причем горизонтальная связь перекрытия 31 с основанием 44 осуществляется посредством двух балансиров 45, при этом выдвижка крепи и подача става на забой производится нижним домкратом 46 соответственно штоковой и поршневой стороной этого домкрата.
Синхронизация величины подачи става 24 и верхней базы 25 на забой осуществляется путем последовательного питания нижнего и верхнего домкрата при подаче става и параллельного их питания при выдвижке крепи, для чего применен в гидросхеме двухходовой золотник 47.
Работает гидросхема следующим образом: при подаче состава на забой напор H подается в поршневую полость нижнего домкрата 46, из штоковой полости жидкость подается через золотник 47 в штоковую полость верхнего домкрата 34 с теми же диаметрами, что и нижний. Из поршневой полости верхнего домкрата жидкость уходит на слив С. При реверсе давления в подводах H и С золотник переключается и давление из подвода С попадает в поршневую полость верхнего домкрата, а из штоковой полости вытесняется на линию H, где будет сливное давление. Аналогично, т.е. в самостоятельном параллельном питании, работает и нижний домкрат. Параллельное питание этих домкратов в каждом новом цикле обеспечивает сброс ошибки при синхронной подаче верхнего и нижнего става на забой.
Транспортное оборудование агрегата включает два транспортных желоба в забое: желоб 48 со скребками 49 с забойной стороны от направляющей 20 и желоб 50 со скребками 51 - с завальной стороны от направляющей.
К транспортному оборудованию агрегата относится также перегружатель 52 и ленточный конвейер большой производительности. И перегружатель, и ленточный конвейер 53 являются специальными высокоскоростными модификациями серийных прототипов и поэтому включаются в состав оборудования агрегата при его производстве и поставке. Располагая обычными серийными приводами с мощностью порядка до 200 кВт, они имеют примерно трехкратную производительность за счет их малой длины (порядка 30 м), а меньшая ширина их (для размещения энергопоезда сбоку от ленточного конвейера) компенсируется существенно большей скоростью.
Размещение стрелы перегружателя над ленточным конвейером достигается за счет того, что на сопряжении лавы со штреком применена вандрутная крепь 54, состоящая из балок двутаврового поперечного сечения, по нижней полке которого передвигаются самоходные тележки 55, соединенные попарно с размещением между парами тележек манипуляторов 56. Стрелка манипулятора 57 используется для разнообразных вспомогательных работ, в том числе для перемещения стрелы перегружателя 52, для выдергивания и перемонтажа призабойной ножки (стойки) штрековой крепи (захватом 58), для транспортировки и установки этой ножки (стойки) после прохода агрегата (ножки 59) и для выполнения подъемно-транспортных операций на сопряжении с лавой и на конвейерном (а также на вентиляционном) штреках на всей длине вандрутного крепления при эксплуатации очистного забоя, в том числе демонтаж балок 54 вандрутной крепи, механизированную транспортировку их вдоль всей линии вандрутной крепи и подмонтаж очередной балки на другом конце вандрутной крепи в обратной последовательности, чем достигается процесс движения вандрутной линии в направлении подвигания фронта очистного забоя.
При работе с погашением штреков манипулятор 56 используется для извлечения из завала звеньев штрековой крепи. В этом случае процесс выдергивания производится за счет сокращения длины стрелы, выполненной с двойной телескопичностью, а гидродвигатели 60 заторможены и включаются в работу при транспортировке груза.
Конструктивно самоходные тележки 56 выполнены с возможностью принудительного прижатия колес 61 к направляющей 62, в качестве которой используется нижняя полка двутавра 54. Прижатие обеспечивается домкратом 68, связанным с подвижной частью тележки, имеющей противоположный ролик с обратной стороны направляющей.
Точно такое же устройство имеет тележка энергопоезда 64 (насосные станции, магнитная станция, станция привода орошения, станции пылеотсоса, вентиляции и др.). Эти тележки используют в качестве направляющей 65 трубы, проложенную вдоль конвейерного штрека по почве. Отличием этих тележек является применение двух гидродвигателей 60 по обе стороны от направляющей 65, что увеличивает двигательные возможности такой пары до примерно 10 т.
В качестве гидродвигателей используются серийные гидродвигатели типа ЭМР1 радиально-поршневого типа с радикальным его изменением, позволяющим его использование в пожароопасных шахтных условиях. Конструктивно наиболее близкий аналог включает поршни 66, расположенные в два ряда и связанные между парами роликами 67, обкатывающими дуговые профили статора 68. Однако питание рабочих полостей осуществляется не маслом, а эмульсией, получаемой от насосной станции мехкрепи. В отличии от аналога, у которого коммутация была выполнена радиальным золотником, в предлагаемом гидродвигателе применен сдвоенный плоский осевой золотник из двух подвижных в осевом направлении плоских золотников 69 и 70, связанных со статором 71 и обжимающих с двух сторон вращающийся венец ротора 72. Благодаря этому достигается уравновешивание их в осевом направлении и коммутация рабочей жидкости по большой поверхности вращения в точках 74 и 75 и полный выбор зазора в паре, что необходимо из-за малой вязкости эмульсии.
Применение движителя в виде двух гидродвигателей, в стендовых условиях показало их работоспособность и возможность получения двигательного усилия от одной пары двигателей порядка 10 т. В связи с этим манипулятор 56, состоящий из двух самоходных тележек и объединяющей рамы, может обеспечить также не только транспортировку секций крепи при перемонтажах агрегата из одной лавы в другую, но и доставку секций в монтажную камеру, по кровле которой также собирается вандрутная линия, причем по сопряжению эта линия не прерывается для перемонтажа, а заменяется двумя фигурными криволинейными балками, образуя одну общую направляющую по штреку, по сопряжению и по монтажной камере.
Благодаря такой конструкции достигается полная механизация монтажа и демонтажа агрегата с повышением производительности и снижением срока простоя агрегата на монтажно-демонтажные работы не только на пологом, но и на крутом падении пласта.
Для повышения безопасности добычи угля в условиях повышенной загазованности или пожароопасности вместо электроприводов предусматривается применение гидродомкратного привода цепи 7 от гидродвижителей 76, монтируемых внутри верхней трубчатой направляющей 21. Гидродвижитель имеет поворотный кулак 77, постоянно отжимаемый в сторону цепи 7 плунжером 78, находящимся под давлением рабочей жидкости. Этот плунжер находится либо в выдвинутом положении, когда против кулака 77 оказалась впадина пластинчатой цепи 7, либо в задвинутом положении, когда цепь при своем движении подойдет своим широким звеном (как это показано на фиг. 3 сплошными линиями). Два положения согласно конструкции приводят к переключению клапана 79, имеющего две рабочие кромки двух коммутирующих конусов. В положении по чертежу напор попадает только в штоковую полость домкрата, а слив - в поршневую полость, т.к. правый по чертежу клапан открыт, а левый - закрыт, следовательно, при этом положении домкрат складывается до тех пор, пока кулак 77 не попадет во впадину цепи или сама цепь за счет других движителей не продвинется вперед. Как только подойдет к данному кулаку впадина цепи, кулак под действием плунжера 78 повернется и включит домкрат на раздвижку, т.к. поршневая полость его подключится к напору. Произойдет силовое взаимодействие его с цепью, и движение цепи будет происходить за счет данного движителя.
Всего гидродвижителей применяется не менее 9, из которых три гидродвижителя работают в разных фазах при времени внутри одного цикла, количество же троек может быть три, четыре, пять и т.д. в зависимости от длины лавы.
Технологическая схема работы агрегата с гидродвижителями может быть любая, а именно с обоими штреками обратным ходом, с предварительным проведением только одного штрека и с оставлением второго штрека в выработанном пространстве, как это изображено на фиг. 1, и, наконец, обработка поля без предварительной проходки выемочных штреков.
Последняя схема возможна только при использовании гидродвижителей вместо электроприводов, первая же схема и вторая схема может применяться и с электроприводом (более энерговооруженная схема), и с гидродвижителями для вынужденных условий, связанных с повышенной газообильной средой или пожароопасных условий конкретного угольного пласта.
В агрегате исполнительный орган в зависимости от условий работы может иметь различное выполнение.
Так, может использоваться исполнительный орган фронтального агрегата, содержащий цепь с резцами и скребками, а концевые привода 10 с приводными звездочками 13 и шестернями, взаимодействующими с электроприводами, в которых редуктор 17 привода имеет один вал со звездочкой и одну приводную шестерню, работающую одновременно несколькими, например тремя, зубьями, взаимодействующими с выходными шестернями трех серийных конвейерных приводов, прифланцованных к редуктору концентрично к оси вала и имеющих каждый свой электродвигатель и свою турбомуфту.
При работе в коротких забоях или целиках переменной ширины может использоваться дополнительный орган фронтального агрегата, содержащий цепь с резцами и скребками и концевые звездочки, в котором концевые звездочки выполнены без электропривода, обеспечивая проход резцовых кареток с разрушением глухого забоя круговой формы и возможность работы агрегата без проведения вентиляционного штрека, с оставлением и креплением его за агрегатом в том числе по технологической схеме с повторным его использованием, без предварительного прохождения подготовительных выработок.
При необходимости исключения применения электроэнергии в агрегате может использоваться исполнительный орган фронтального агрегата, содержащий цепь с резцами и скребками, с приводом от гидродомкратов, расположенных позади верхней цепи в забойных цилиндрических направляющих и взаимодействующих с наружными пластинами цепи посредством поворотного кулака, поджимаемого к поверхности цепи, причем коммутация домкратов производится клапанами, взаимодействующими с кулаком таким образом, что при повороте кулака в сторону впадины цепи домкрат включается на раздвижку, а поворот кулака под действием наружной пластины цепи приводит к сокращению домкрата, при этом в первом случае усилие домкрата передается на цепь, а во втором случае производится сокращение домкрата и ожидание им подхода следующей впадины цепи.
В агрегате могут использоваться резцы исполнительного органа, включающие установленные на цепи скребки каретки для установки резцов с забойной и с завальной сторон цепи, имеющие по два ролика, расположенных один вслед за другим вдоль задней завальной направляющей, выполненной на приводе в виде кольцевой конструкции в направлении принудительного разворота обоих роликов вокруг оси приводного вала со звездой.
Кроме того, может использоваться став агрегата, содержащий две самостоятельно передвигаемые базы с направляющими исполнительного органа, с отдельными двигательными домкратами, с системой синхронного передвижения, причем нижняя база имеет продольные балки, жестко связанные со ставом и поднятые над почвой на высоту расчетной кривизны пласта с опорой на почву через две лыжи, расположенные под забойным концом става и на завальном конце балки, а верхняя база имеет продольную балку, расположенную ниже перекрытия крепи и связанную своим завальным концом с кулисой перекрытия секции крепи, перемещаемой в пазах крепи верхним двигательным домкратом, и связанную своей средней частью с нижней базой посредством двух забойных стоек, расположенных Л-образно с наклоном верхних концов друг к другу и соединенных с верхней продольной балкой и с нижней базой сферическими кинематическими парами, например типа уключины, для обеспечения расчетного зазора от верхней базы до кровли и отбойку исполнительным органом постоянной мощности пласта независимо от фактического положения кровли и перекрытия цепи при запертых забойных стойках.
Может использоваться механизм регулирования перемещения направляющей става агрегата и вертикальной плоскости, содержащий гидравлический плунжер с обратной пружиной, подключенный к одной для всех механизмов управляющей гидромагистрали, при этом почвенные резцы сгруппированы на кольцевой крепи исполнительного органа в одном месте на длине не более нескольких рядом стоящих секций для изменения уровня подрубки почвы только против упомянутых рядом стоящих секций при изменении давления в управляющей магистрали.
В агрегате могут применяться секции механизированной крепи, включающие перекрытия и нижние домкраты передвижения, связывающие нижнюю базу става с основаниями, на которые оперты посадочные стойки, имеющие верхнюю базу с кулисой, перемещаемой в пазах крепи совместно с козырьком, поджимными плунжерами и исполнительным органом, и связанными с Л-образно расположенными стойками, концы которых соединены сферическими кинематическими парами с верхней и нижней базами.
Эти секции могут иметь перекрытие крепи, включающее выдвижной козырек, расположенный в выполненном в зоне над балкой верхней базы проеме, открытом вверх в сторону кровли и вниз, шарнирно соединенный своим завальным концом с балкой става и опирающийся в средней своей части на гидропатрон балки, причем консоль выдвижного козырька, выдвигающаяся совместно с балкой, имеет неизменный зазор порядка 50 мм до линии резания кровельного резца.
В агрегате может применяться вандрутная крепь сопряжения, состоящая из секций, соединяемых между собой двумя продольными пальцами и снабженная направляющими для возможности передвижения и пространственной опоры самоходных тележек с манипуляторами, при этом прочность поперечного профиля и прочность продольных пальцев выбирается из условий воспринятия полной нагрузки от всех стоек, выбиваемых в зоне выхода агрегата в штрек, и передачи этих нагрузок на рамы штрековой крепи впереди забоя, где призабойные стойки еще не выбиты, и на рамы штрековой крепи позади агрегата, где призабойные стойки поставлены в процессе сохранения штрека, а операции по выбивке призабойных стоек, их транспортирования и установки выполняются манипулятором, установленным на стреле самоходной тележки при дистанционном управлении манипулятором с места, расположенного рядом с манипулятором выносного гидропульта.
Может использоваться также лавное транспортное оборудование агрегата, включающее забойное транспортное устройство, связанное с пластинчатой цепью исполнительного органа с образованием транспортного желоба и с забойной стороны цепи, где работают забойные резцы, и транспортного желоба с завальной стороны, где располагаются при большой мощности пласта средние резцы, закрепленные на каретках, при этом перераспределение количества угля из одного желоба в другой в процессе транспорта осуществляется за счет диагонально расположенных скребков на нижней, на забойной и на верхней поверхностях цепи.
В агрегате может применяться перегружатель на базе серийного скребкового конвейера с увеличением его производительности за счет малой длины и увеличенной скорости, в котором загрузочная его часть расположена ниже почвы забоя, а стреловая часть располагается над штрековым ленточным конвейером, перемещаясь самоходными тележками, расположенными в ряд сбоку ленточного конвейера и нагруженных машинам, составляющими энергопоезд, при этом направляющей для движения тележек служит труба, укладываемая отрезками прямо на почву, а двигателями тележек являются спаренные двухребордные ролики, обжимающие эти направляющие и приводимые в движение с помощью гидродвигателей большого момента, работающих от давления рабочей эмульсии, применяемой в гидросистеме мехкрепи.
Или вместо такого выполнения может использоваться перегружатель на базе конвейера с увеличением его производительности за счет малой длины и увеличенной скорости, отличающийся тем, что для перемещения стрелы перегружателя используются самоходные тележки, движущиеся по направляющим вандрутной крепи сопряжения, используемой для крепления сопряжения, воспринятия повышенного опорного горного давления, а также для движения монтажных манипуляторов для монтажных и вспомогательных работ.
Для данного агрегата предлагается также гидродвигатель большого момента, в котором для подачи рабочей жидкости к радиально расположенным поршням ротора применен коллектор, состоящий из двух плоских осевых золотников, охватывающих осевые плоскости ротора с двух сторон и уравновешенных в осевом направлении.
В данном агрегате может использоваться средство управления движения агрегата по гипсометрии пласта, выполненное в виде программатора, представляющего собой визуальный имитатор движения по длине лавы цепи исполнительного органа с почвенными резцами, который состоит из пластинчатой цепочки на пульте, приводимой в движение импульсами давления, получаемого по шлангу от клапана, взаимодействующего с кулаками на оси привода по числу зубьев звезды, звенья цепочки имеют винты, настраиваемые машинистом агрегата, которые взаимодействуют с лимбом регулятора давления, подаваемого в линию управления механизмами завальной направляющей в зависимости от фактического положения почвенных резцов по длине лавы и в зависимости от программы, задаваемой машинистом.
Для агрегата предлагается также средство контроля фактического положения агрегата относительно границы уголь - порода, включающее трубопровод, состоящий из жестких и гибких участков с тензометрическими датчиками изгиба в горизонтальной и вертикальной плоскости, в котором внутренняя полость трубопровода заполнена жидкостью и датчиками гидростатического давления, рассредоточенными по длине лавы, а на центральном пульте управления имеется ЭВМ, выдающая на экран пульта положения става в абсолютной системе координат с отметками точек абсолютного положения границ пласта, прогнозируемого ЭВМ методом регрессии точек, визуально наблюдавшихся в ходке агрегата выходов пласта относительно става на предыдущих циклах подвигания агрегата и записанных в памяти ЭВМ в качестве объективных стационарных характеристик гипсометрии пласта в абсолютных координатах.
Агрегат работает следующим образом.
Производится включение с некоторыми задержками по времени всех шести (если сборка полная) серийных конвейерных приводов с электродвигателями 19 и турбомуфтами 18, которые сглаживают разнобой пусковых и рабочих характеристик разных электродвигателей, вынужденных работать точно с равными оборотами на одну и ту же шестерню 14, которая вращает звезду 13 и рабочую цепь 7. Уголь отбивается одновременно по всей длине лавы резцами 40, которые располагаются под разными углами и охватывают линии резания нижней половины мощности пласта при движении по нижним направляющим и обрабатываются все линии резания верхней половины мощности пласта при движении цепи по верхним направляющим 20 и 21.
Обработка почвы и кровли осуществляется только крайними "почвенными" резцами, положение которых зависит от высоты настройки завальных направляющих 22. Уголь транспортируется вдоль лавы по двум желобам одновременно. Левый желоб 48 от забоя до цилиндрической направляющей заполняется непосредственно со стороны забоя и транспортируется скребками 49, которые одновременно смещают уголь под цепью вперед, спереди цепи - вверх и над цепью - в сторону завала. Второй желоб 50 заполняется сверху и из первого желоба, и скребками 51 уголь транспортируется до загрузочной головки перегружателя 52.
Перегружатель своей разгрузочной стрелой поднят над лентой и перегружает уголь на него, затем на другие шахтные ленточные конвейеры до ствола или до поверхности в зависимости от типа шахты. Главным условием рациональной схемы является непрерывность транспорта от агрегата, отсутствие узких мест с пониженной пропускной способностью. Поэтому производительность системы агрегат - шахта является наибольшей, если пропускная способность транспорта порядка 20 т/мин имеет место и в забое, и по всей транспортной цепи и если передвижение всего забойного оборудования, включая крепь, став, перегружатель и энергопоезд, может производиться без остановок и перерывов в добыче и транспортировке угля.
Перемещение энергопоезда осуществляется с помощью гидравлических движителей либо одновременно с подачей става, либо по команде с центрального гидропульта 5, где имеются специальные клапаны для подачи рабочей эмульсии в гидродвигатели 60 и домкраты 63.
Управление агрегатом по гипсометрии пласта осуществляется автоматически по программе, закладываемой машинистом агрегата в программаторе путем подвертывания винтов 80, имеющих нумерацию секции.
Если, например, машинист вывернет винт N 10 на 1 оборот, т.е. на 1,5 мм, то этот винт войдет во взаимодействие с лимбом регулятора давления 81 только тогда, когда каретка исполнительного органа с почвенным резцом выйдет против секции крепи N 10. Именно в этот момент давление в линии управления 82 увеличится на 10 атм, что приведет к раздвижке домкратов на 10 мм, что соответствует заглублению почвенного резца в почву на 6 мм с подрубкой почвы на 6 мм только в зоне секции N 10. Таким образом, машинист знает, что вворачивание любого винта на 1 оборот означает, что далее система автоматически будет увеличивать подрубку почвы на 6 мм против той секции, номер которой написан на винте, который регулировал машинист (масштабу 1,5 мм винта соответствует 6 мм подрубки почвы).
Фактическое опускание почвы в зоне носка става (в абсолютном измерении) определяет система контроля абсолютных координат, которая выдает на дисплей ЭВМ 83 развертку положения подошвы става и кровли (нижних и верхних цилиндрических направляющих) с увеличенным масштабом по высоте экрана (ЭВМ типа ДВК). На фоне конфигурации става ЭВМ рисует также стационарно гипсометрию пласта, которая при постоянных колебаниях высоты става под действием случайных нагрузок от исполнительного органа и в результате неправильных команд машиниста практически не меняется, т.к. является результатом двумерной регрессии всех точек фактических выходов пласта в зоне ходки в течение последнего и всех предыдущих циклов подвигания агрегата. Решение на корректировку программы движения агрегата принимает машинист агрегата по виду конфигурации пласта и положения агрегата на разных участках по длине очистного забоя. При этом результаты срезы же отражаются на дисплее, так как датчик абсолютной высоты става находится практически в зоне резания почвенных резцов.
По мере подвигания забоя ход двигательных домкратов заканчивается, причем вместе с остановкой нижнего домкрата данной секции одновременно останавливается и верхний домкрат, т.к. они подключены последовательно. Завершение хода хотя бы в одном домкрате служит командой для выдвижки всей группы, т.е. 1/3 всех секций, разбитых равномерно по длине лавы. При фронтальной выдвижке группы секций став агрегата с рабочим органом продолжает выемку угля, отталкиваясь от остальных секций крепи, т.е. 2/3 всех секций. При выдвижении секций их домкраты работают параллельно, что исключает накапливание ошибок синхронизации подачи верхнего и нижнего става. Небольшие ошибки синхронизации не страшны, т.к. передние стойки, соединенные "уключинами", никоим образом под изгибающие нагрузки при опережении или отставании верхнего става не попадают.
При подаче става на забой периодически выбивается призабойная ножка штрековой крепи. Эта операция выполняется манипулятором 56, на стреле которого 57 имеется захват в виде двух "пальцев", которые захватывают ножку, отталкиваясь от почвы вспомогательной стойкой, выдергивают ножку из почвы, затем разворачивают ножку вдоль стрелы и отвозят ее в сторону завала, где устанавливают эту ножку в обратной последовательности. Это при основной технологической схеме работы с сохранением штрека.
Имеются две другие технологические схемы и модификации агрегата.
Одна из этих схем - работа с одним электроприводом (три по 200 кВт) по схеме с выемкой второго штрека по схеме с глухим забоем.
Особенность этой схемы - подготовка выемочного поля ускоренным способом с экономией одного штрека при проходке (фиг. 1).
Вторая технологическая схема, когда на обоих концах агрегата нет электропроводов, обе концевые звезды являются не приводными, а обводными. В качестве конвейерного используется штрек, оставленный от выемки нижнего столба с сохранением штрека в завале, а в качестве вентиляционного штрека является штрек, оставляемый за верхней звездочкой. Особенностью такой схемы является не только экономия предварительного проведения подготовительных выработок, но еще способ отработки особо газовых или пожароопасных пластов, не допускающих применение электроэнергии в лаве и на сопряжениях со штреком. Привод цепи в этом случае производится за счет энергии насосных станций, количество которых примерно удваивается, а в принципе, возможно использование специально разработанных станций большой производительности.
В качестве варианта предусматривается перемещение и крепление стрелы перегружателя на платформах энергопоезда с закреплением серийных рештаков и приводной головки своими боковыми поверхностями к кронштейнам платформ эксцентрично, но с уравновешиванием их за счет веса станций и другого тяжелого оборудования, размещаемого на платформах, каждая из которых в носовой части движется по трубчатой направляющей, а в хвостовой части движется по почве на боковых лыжах.
Способ монтажа и демонтажа агрегата вандрутной крепью и самоходными тележками с манипуляторами включает при монтаже агрегата в монтажной камере самомонтаж вандрутной линии по штреку, по сопряжению и далее непрерывно по монтажной камере, при этом манипулятор оснащают дополнительно двумя "руками", которыми вместе с основной "рукой" захватывают каждую секцию за три точки, предусмотренные в конструкции секций и узлов, транспортируют эту секцию от штрека до места в лаве, кантуют и устанавливают секцию в лаве, при этом бригадной ведут гидроразводку и отладку агрегата с последующим перебросом вандрутной линии в эксплуатационный режим на обоих штреках.
Способ самомонтажа вандрутной линии осуществляют двумя самоходными тележками, связанными между собой гидроуправляемой "рукой" таким образом, что "руку" выставляют напротив продольных пальцев, соединяющих балки вандрутной линии, гидродвигатели тележек затормаживают, производят продольное перемещение крайней балки вандрута, которую после рассоединения отводят в сторону и транспортируют вдоль всей вандрутной линии на другой ее конец, где подмонтируют в обратной последовательности.
В результате такого устройства фронтальный агрегат может действительно решить задачу повышения суммарной удельной производительности и нагрузки за весь период службы оборудования при минимальной стоимости и металлоемкости и максимальном использовании всех средств транспорта и систем поддержания в режиме одни забой - шахта, что в итоге позволяет отнести агрегат к поколению машин нового техноэкономического уровня.

Изобретение относится к горной промышленности и может использоваться для подземной разработки угольных и других пластовых месторождений. Фронтальный агрегат нового уровня, включающий кольцевой отбойный и доставочный исполнительный орган, имеет секции механизированной крепи, перегружатель, крепь сопряжения, исполнительный орган содержит цепь с резцами и скребками и приводы. Став имеет нижние и верхние забойные и завальные направляющие, последние из которых перемещаются в вертикальной плоскости с помощью механизмов регулирования. Секции крепи связаны со ставом домкратами передвижения. Транспортное оборудование состоит из лавного оборудования, перегружателя и штрекового оборудования. Имеются также средства управления и контроля движения агрегата по гипсометрии пласта, средства механизации концевых операций и средства монтажа и демонтажа агрегата. Все машины и механизмы имеют кинематическую и технологическую взаимосвязь и взаимодействие. Исполнительный орган совмещает отбойку угля по всей поверхности забоя с транспортировкой угля, став направляет движение исполнительного органа по почве и кровле и одновременно участвует в поддержании кровли и боковой устойчивости крепи, крепь сопряжения обеспечивает поддержание кровли на сопряжении, исключает концевые операции и обеспечивает механизацию работ при перемонтаже. В результате достигается увеличение нагрузки на забой, экономия суммарных трудозатрат и сбережение ресурсов. 18 с.п. ф-лы, 10 ил.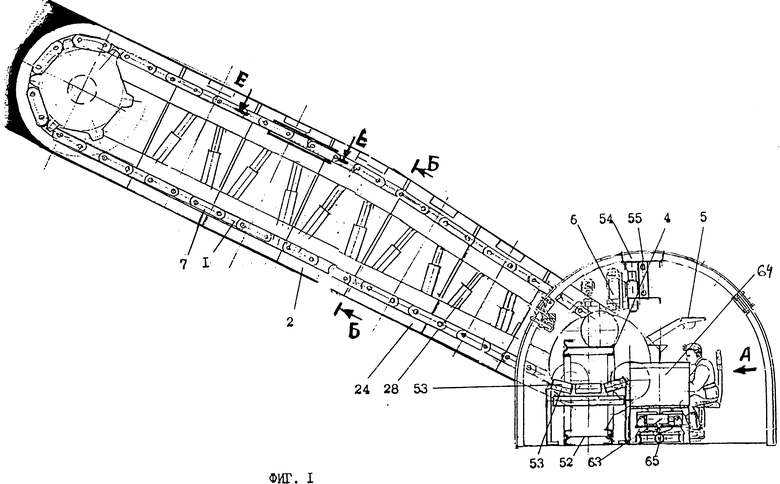
| Медведев Ю | |||
| Робот спускается под землю | |||
| - Техника молодежи, N 8, 1982, с | |||
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
| SU, авторское свидетельство, 693027, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Башт а Б.М | |||
| Машиностроительная гидравлика | |||
| - М.: Гостехиздат, 1963, с .154 - 158 | |||
| SU, авторское свидетельство, 968386, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| SU, авторск ое свидетельство, 1814687, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Кры лов В.Ф | |||
| и др | |||
| Напра вления комплексной механизации разработки крутых и наклонных пластов | |||
| - М | |||
| ; Недра, 1974, с | |||
| Способ прикрепления барашков к рогулькам мокрых ватеров | 1922 |
|
SU174A1 |
| SU, авторское с видетельство, 1792489, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
