Изобретение относится к прецизионному машиностроению, а конкретно к позиционирующей и виброизолирующей системе, которая может быть использована в технологическом и исследовательском оборудовании: в системах адаптивной оптики, в установках ионной, электронной, рентгеновской и оптической литографии, в координатно-измерительных машинах, в сканирующих зондовых микроскопах, в оборудовании для механообработки и др.
Известен позиционный пневмогидравлический привод, содержащий кинематически последовательно связанные пневмоприводной цилиндр и гидроприводной цилиндр, в которых размещены поршни со штоками с образованием соответствующих режиму позиционирования приводных и тормозных полостей, две из которых выполнены пневматическими и связаны с источником рабочей среды, а две другие - гидравлическими, заполнены магнитореологической жидкостью и связаны между собой с помощью регулируемого дросселя в виде дросселирующих каналов, охваченных двумя последовательно установленными электромагнитными катушками, подключенными с помощью блока управления, - одна к источнику постоянного тока, а другая - к источнику переменного тока, а также связанный с блоком управления датчик обратной связи по перемещению выходного штока, каждый из указанных цилиндров выполнен пневмогидравлическим, причем регулируемый дроссель и гидроприводной цилиндр выполнены встроенными в поршне и штоке пневмоприводного цилиндра, тормозная полость которого выполнена гидравлической и соединена с помощью упомянутого регулируемого дросселя с приводной полостью гидроприводного цилиндра, а тормозная полость последнего выполнена пневматической (Патент РФ №2065092, МПК6 F15D 11/12, 10.08.1996).
При подаче рабочей среды в полость пневмоприводного цилиндра поршень начинает перемещаться. Магнитореологическая жидкость из одной полости гидроприводного цилиндра вытесняется в другую через дросселирующие каналы. Проводимость каналов определяется формой и величиной питающего напряжения на катушках. Для снижения вязкости жидкости, протекающей через дроссель в неуправляемом режиме, служит катушка, соединенная с источником переменного тока. Другая катушка питается постоянным током и изменяет вязкость протекающей через каналы магнитореологической жидкости. Датчик служит для сравнения фактического и заданного положений штока. При реверсе привода давление в полости сбрасывается, отключается управляющая катушка и под действием возвратной пружины осуществляется обратный ход штока. Для ускоренного реверса в полость подается избыточное давление рабочей среды от источника. При аварийном сбросе давления в рабочей полости цилиндра возможен возврат штока в исходное положение или фиксация в положении, предшествующем аварии.
Недостатком известного устройства является большое время реверса привода, обусловленное большой сжимаемостью воздуха, который подается под давлением поочередно в полости пневмоприводного цилиндра. В наибольшей степени этот недостаток проявляется, если необходимо осуществить позиционирование привода в заданной точке с высокой точностью. При этом привод, как правило, сначала проскакивает заданное положение, затем останавливается и начинает обратное движение к заданной точке. Этот процесс возвратно-поступательного движения привода повторяется до тех пор, пока не произойдет позиционирование в нужном положении и с заданной точностью. Еще одним недостатком известного устройства является низкая точность позиционирования привода вследствие больших сил трения, возникающих при движении поршней в пневмоприводном и гидроприводном цилиндрах.
Известен также магнитореологический демпфер, содержащий цилиндр, заполненный магнитореологической жидкостью, поршень, электромагнитную катушку, магнитопровод, образованный элементами поршня, выполненный в поршне дросселирующий канал, образованный стенками, из которых, по крайней мере, одна имеет поперечные пазы. (US 6637556 (В1), F15F 15/03, 2002 (08), 2003).
При движении поршня магнитореологическая жидкость перетекает из одной полости цилиндра в другую через дросселирующий канал. При подаче управляющего тока в электромагнитную катушку в магнитопроводе демпфера возникает магнитный поток. За счет использования поперечных пазов в стенках дросселирующего канала демпфера происходит фокусировка и усиление магнитного потока на выступах между канавками, за счет чего повышается эффективность воздействия магнитного поля на протекающий в дросселирующем канале поток магнитореологической жидкости. При этом происходит большее изменение вязкости жидкости по сравнению с магнитореологическим демпфером, имеющим дросселирующий канал с гладкими стенками.
Недостатком известного устройства является недостаточно высокая фокусировка и усиление магнитного потока на выступах между поперечными канавками, так как выступы имеют прямоугольную форму. При этом максимальная индукция магнитного поля вблизи выступов, равная отношению магнитного потока в магнитопроводе демпфера к площади поверхности верхней части выступов, ограничивается технологически выполнимой минимальной величиной этой площади. Еще одним недостатком известного устройства является увеличенное гидравлическое сопротивление дросселирующего канала вследствие того, что поперечные канавки в стенках канала не заполнены немагнитным материалом. При течении магнитореологической жидкости через канал происходит искривление траектории движения жидкости, завихрение гидравлического потока, нарушение ламинарного режима течения и, как следствие, увеличение гидравлического сопротивления дросселирующего канала. Это приводит к уменьшению скорости движения демпфера и возрастанию нагрузок при демпфировании.
Известна наиболее близкая к заявляемому устройству магнитореологическая позиционирующая и виброизолирующая система, содержащая основание, каретку с перемещаемым объектом, установленную на опоре с возможностью углового перемещения относительно основания, сильфонные гидроцилиндры, закрепленные между основанием и кареткой, насосную станцию, полость свободного слива, входные магнитореологические дроссели, установленные между насосной станцией и сильфонными гидроцилиндрами, выходные магнитореологические дроссели, установленные между сильфонными гидроцилиндрами и полостью свободного слива (US 5452745 A, F15B 21/00, 1994 (07), 1995).
За счет подачи управляющих сигналов на входные и выходные магнитореологические дроссели происходит изменение вязкости рабочей жидкости и, как следствие, изменение давлений в сильфонных гидроцилиндрах, под действием которых происходит угловое перемещение каретки, установленной на опоре. Система автоматического управления контролирует положение объекта перемещения и осуществляет его позиционирование и виброзащиту от внешних возмущающих воздействий.
Недостатками известного устройства являются ограниченные функциональные возможности по обеспечению точности позиционирования объекта за счет наличия сферического подшипника с парой внешнего трения, снижающей точность перемещения, возможность только угловых перемещений при позиционировании и виброизоляции, отсутствие самоторможения гидроцилиндров при выключенной системе управления, большие габариты устройства вследствие того, что его элементы разнесены в пространстве.
Технический результат, обеспечиваемый настоящим изобретением, заключается в существенном расширении функциональных возможностей системы, а именно:
- в значительном повышении точности позиционирования объекта перемещения (теоретически на порядок лучше за счет замены сферического подшипника с парой внешнего трения на узел упругой подвески) по сравнению с аналогом в автоматическом режиме регулировки и стабилизации ускорения объекта перемещения;
- в существенном уменьшении габаритов (за счет расположения магнитореологических дросселей внутри гидроцилиндров);
- в обеспечении самоторможения гидроцилиндров при выключенной системе управления (за счет введения в магнитную цепь магнитореологических дросселей постоянных магнитов);
- в увеличении числа степеней подвижности при позиционировании и виброизоляции (до трех степеней подвижности).
Достижение технического результата обеспечивает магнитореологическая позиционирующая и виброизолирующая система, содержащая основание, каретку, установленную с возможностью перемещения относительно основания, сильфонные гидроцилиндры, насосную станцию, полость свободного слива, входные магнитореологические дроссели, установленные между насосной станцией и сильфонными гидроцилиндрами, выходные магнитореологические дроссели, установленные между сильфонными гидроцилиндрами и полостью свободного слива. Каретка содержит систему трех взаимно перпендикулярных штоков, обеспечивающих перемещение объекта вдоль трех соответствующих осей и закрепленных в гидроцилиндрах за счет сильфонов, гидроцилиндры объединены в единый модуль, закрепленный на основании, а объект перемещения, жестко связанный с подвижной кареткой при помощи трех тяг, закреплен в узле упругой подвески, расположенном соосно с кареткой.
Для обеспечения самоторможения устройства при выключенной системе управления все входные и выходные магнитореологические дроссели дополнительно содержат постоянные магниты, встроенные в магнитопровод, а одна из стенок рабочего зазора дросселя снабжена концентраторами напряженности магнитного поля в виде окружных зубцов, впадины между которыми заполнены немагнитным материалом, что позволяет увеличить напряженность магнитного поля в районе зубцов, и тем самым увеличить эффективность работы дросселя (при том же электрическом токе на э/м катушке в области рабочего зазора дросселя обеспечивается локально большая концентрация силовых линий магнитного поля и большая магнитная индукция).
В предпочтительном варианте осуществления изобретения узел упругой подвески объекта перемещения выполнен в виде пневмоцилиндра с направляющим и уплотнительным элементом в виде упругой мембраны и снабжен трубопроводом для подачи сжатого воздуха.
Возможность промышленной применимости изобретения иллюстрируется примером конкретного осуществления магнитореологической позиционирующей и виброизолирующей системы.
На фиг.1 представлена схема магнитореологической позиционирующей и виброизолирующей системы; на фиг.2 - схема сильфонного гидроцилиндра; на фиг.3 - схема магнитореологического дросселя.
Магнитореологическая позиционирующая и виброизолирующая система (фиг.1) содержит каретку 1, шесть сильфонных гидроцилиндров 2, гидравлическую насосную станцию 3, узел упругой пневмоподвески 4, объект перемещения 5, трубопровод для подачи сжатого воздуха 6, тяги (рычаги) 7, основание 8.
Перемещение от каретки 1 передается при помощи тяг 7 на объект 5. Объект 5 закреплен на упругой мембране узла пневмоподвески 4 таким образом, что его центр тяжести совпадает с центром упругой мембраны. При сборке устройства необходимо обеспечить максимальное совпадение вертикальной оси каретки 1 и вертикальной оси узла пневмоподвески 4 и объекта 5. Объект 5 может перемещаться относительно узла пневмоподвески 4 по трем координатам (двум угловым - вокруг горизонтальных осей Х и Y; и одной линейной - вдоль вертикальной оси Z). Сильфонные гидроцилиндры 2 предназначены для перемещения каретки 1 и закреплены навстречу друг к другу - по два на каждую из координат. Корпуса шести гидроцилиндров 2 выполнены в виде единого модуля и закреплены к основанию 8. Насосная станция 3 предназначена для подачи рабочей жидкости - магнитореологической суспензии - в сильфонные гидроцилиндры 2 и создания в них требуемого давления. Узел упругой пневмоподвески 4 предназначен для крепления объекта перемещения 5 с возможностью его перемещения по трем координатам (двум - угловым и одной - осевой) и для вывешивания массы объекта 5 при помощи силы, возникающей при воздействии сжатого воздуха на упругую мембрану 4, что позволяет перенести часть веса объекта на указанный узел. Сжатый воздух подводят при помощи трубопровода 6.
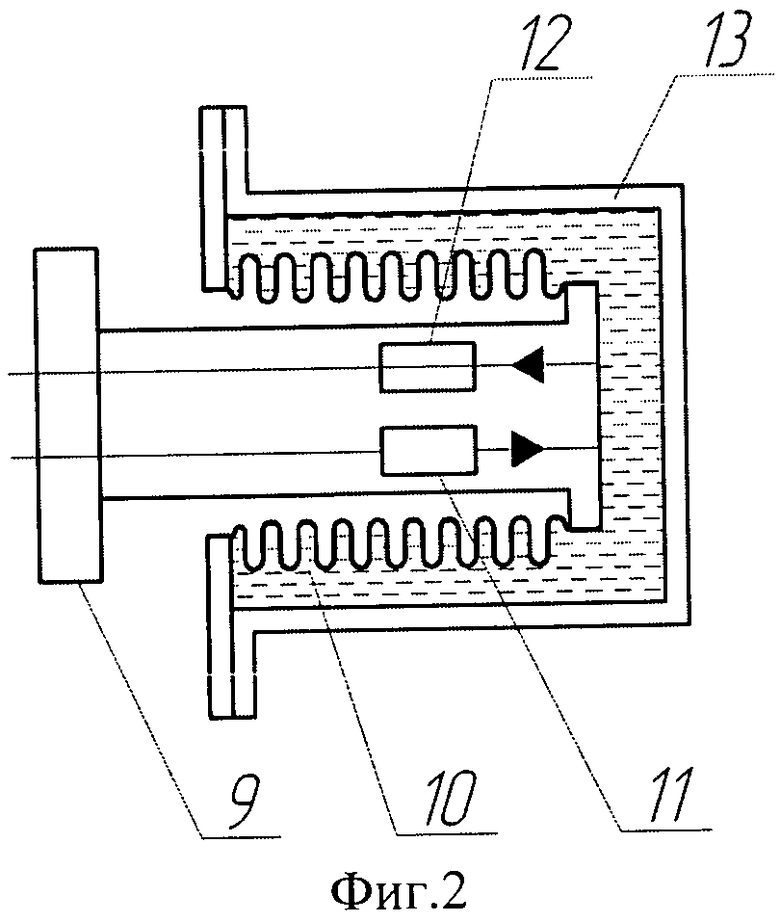
Сильфонный гидроцилиндр 2 (фиг.2) состоит из корпуса гидроцилиндра 13, в котором за счет сильфона 10 закреплен шток 9. Уменьшение габаритов магнитореологического устройства достигается за счет размещения входного магнитореологического дросселя 11 и выходного магнитореологического дросселя 12 внутри штока 9.
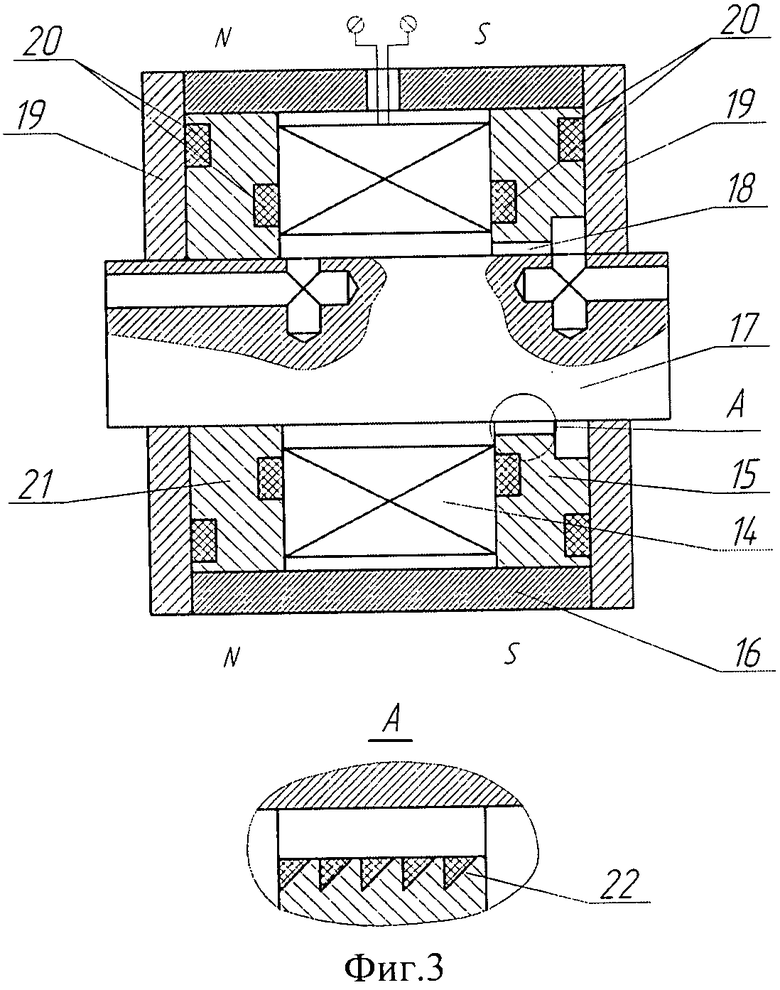
Магнитореологический дроссель (фиг.3) содержит магнитную систему, состоящую из магнитопровода и электромагнитной катушки 14. Магнитопровод состоит из кольца 15, втулки 16 и собственно штока 17. В магнитопровод встроены постоянные магниты 21 для обеспечения самоторможения устройства при выключенной системе управления. Одна из стенок рабочего зазора дросселя 18 снабжена концентраторами напряженности магнитного поля в виде окружных зубцов, впадины между которыми заполнены немагнитным материалом 22 (вид А). Для фиксации всех элементов дросселя применены два кольца из немагнитного материала 19, а для уплотнения стыков деталей используются резиновые кольца круглого сечения 20.
Магнитореологическая позиционирующая и виброизолирующая система предназначена для работы как в вертикальном, так и в наклонном положении. При этом угол наклона оси Z от вертикали может находиться в диапазоне от 0 до 90 градусов, что необходимо при использовании системы, например, в оборудовании для адаптивной оптики (например, в адаптивных составных оптических телескопах). При изменении угла наклона системы давление сжатого воздуха в узле упругой пневмоподвески 4 регулируется таким образом, чтобы действующая на упругую мембрану сила была равна осевой составляющей веса объекта перемещения. Таким образом, объект перемещения 5 с учетом того, что его центр тяжести совпадает с центром мембраны узла пневмоподвески 4, полностью уравновешен как в вертикальном, так и в наклонном положении (от 0 до 90 градусов). При этом происходит компенсация веса объекта перемещения, и создаются условия для достижения максимальной точности при позиционировании и виброизоляции. Предлагаемое устройство работает с замкнутой системой автоматического управления, содержащей датчик положения объекта перемещения и управляющий контроллер (на рисунках не показаны).
В результате предлагаемая система сможет обеспечить высокое качество перемещения объекта в автоматическом режиме с временем переходных процессов порядка 50-100 мс, с обеспечением возможности активного демпфирования (частоты вибрации не более 200 Гц) и коэффициентом эффективности вибрационной защиты 0.01…0.001.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОЗИЦИОННЫЙ ПНЕВМОГИДРАВЛИЧЕСКИЙ ПРИВОД | 1993 |
|
RU2065092C1 |
| КООРДИНАТНЫЙ СТОЛ | 1992 |
|
RU2029447C1 |
| АКТИВНАЯ ОПОРА | 2009 |
|
RU2404381C1 |
| Активная виброизолирующая платформа на основе магнитореологических эластомеров | 2015 |
|
RU2611691C1 |
| ЭЛЕКТРОМАГНИТНАЯ ГИДРАВЛИЧЕСКАЯ ВИБРОИЗОЛИРУЮЩАЯ ОПОРА | 2004 |
|
RU2262623C1 |
| Позиционный пневмогидравлический привод | 1981 |
|
SU994816A1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ И ВЫПОЛНЕННАЯ С ПОДОБНЫМ ИСПОЛНИТЕЛЬНЫМ МЕХАНИЗМОМ КЛАПАННАЯ СИСТЕМА | 2009 |
|
RU2548137C1 |
| ГИДРОПРИВОДНОЙ ДИАФРАГМЕННЫЙ НАСОС-ДОЗАТОР | 1988 |
|
SU1834421A1 |
| УПРАВЛЯЕМАЯ ОПОРА | 2009 |
|
RU2404380C1 |
| Защитное устройство с тарельчатыми клапанами | 2020 |
|
RU2761125C1 |
Система предназначена для прецизионного машиностроения. Система содержит основание, каретку, установленную с возможностью перемещения относительно основания, сильфонные гидроцилиндры, насосную станцию, полость свободного слива, входные магнитореологические дроссели и выходные магнитореологические дроссели. Каретка содержит систему трех взаимно перпендикулярных штоков, обеспечивающих перемещение объекта вдоль трех соответствующих осей и закрепленных в гидроцилиндрах за счет сильфонов, гидроцилиндры объединены в единый модуль, закрепленный на фундаменте, а объект перемещения, жестко связанный с подвижной кареткой при помощи трех тяг, закреплен в узле упругой подвески, расположенном соосно с кареткой. Все входные и выходные магнитореологические дроссели дополнительно содержат постоянные магниты, встроенные в магнитопровод, а одна из стенок рабочего зазора дросселя снабжена концентраторами напряженности магнитного поля в виде окружных зубцов, впадины между которыми заполнены немагнитным материалом. В предпочтительном варианте осуществления узел упругой подвески объекта перемещения выполнен в виде пневмоцилиндра с направляющим и уплотнительным элементом в виде упругой мембраны и снабжен трубопроводом для подачи сжатого воздуха. Технический результат - повышение точности позиционирования объекта; уменьшение габаритов; увеличение числа степеней подвижности до трех. 1 з.п. ф-лы, 3 ил.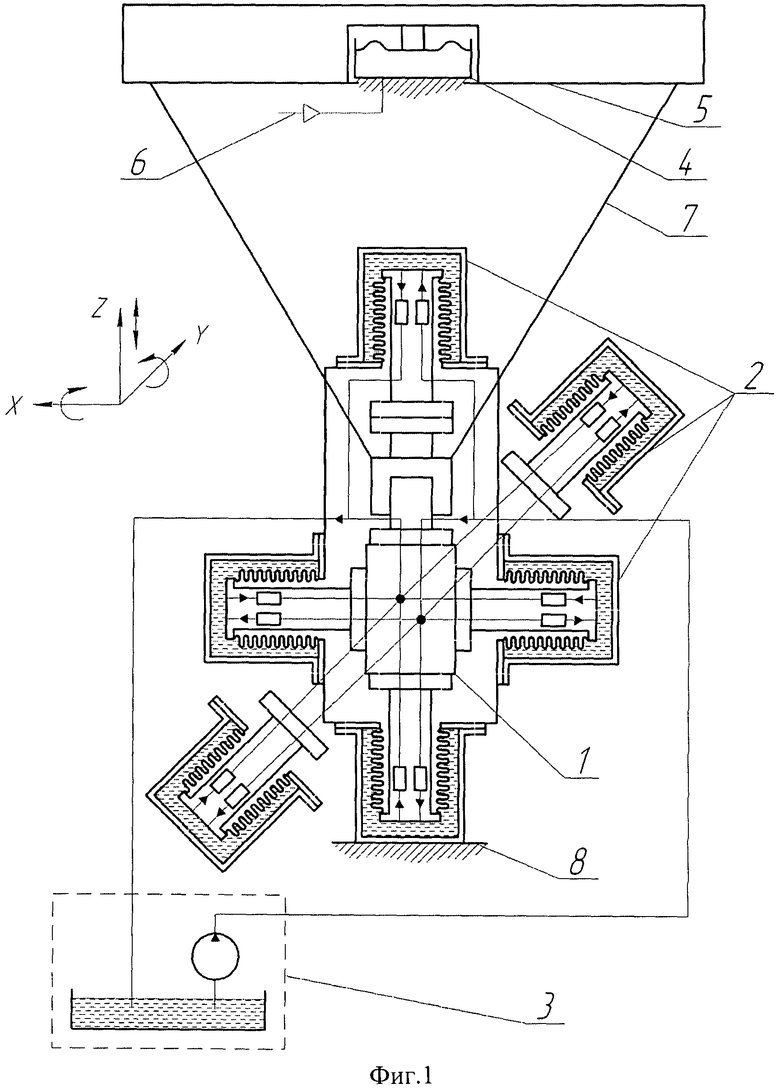
1. Магнитореологическая позиционирующая и виброизолирующая система, содержащая каретку, установленную с возможностью перемещения относительно основания, сильфонные гидроцилиндры, насосную станцию, полость свободного слива, входные магнитореологические дроссели, установленные между насосной станцией и сильфонными гидроцилиндрами, выходные магнитореологические дроссели, установленные между сильфонными гидроцилиндрами и полостью свободного слива, магнитореологические дроссели содержат магнитопровод и электромагнитную катушку, отличающаяся тем, что каретка содержит систему трех взаимно перпендикулярных штоков, обеспечивающих перемещение объекта вдоль трех соответствующих осей, закрепленных в гидроцилиндрах за счет сильфонов, гидроцилиндры объединены в единый модуль, закрепленный на основании, а объект перемещения, жестко связанный с кареткой при помощи тяг, закреплен в узле упругой подвески, расположенном соосно с кареткой, также для обеспечения самоторможения устройства при выключенной системе управления все входные и выходные магнитореологические дроссели дополнительно содержат постоянные магниты, встроенные в магнитопровод, а одна из стенок рабочего зазора дросселя снабжена концентраторами напряженности магнитного поля в виде окружных зубцов, впадины между которыми заполнены немагнитным материалом.
2. Система по п.1, отличающаяся тем, что узел упругой подвески выполнен в виде пневмоцилиндра с направляющим и уплотнительным элементом в виде упругой мембраны и снабжен трубопроводом для подачи сжатого воздуха.
| US 5452745 А, 26.09.1995 | |||
| US 6637556 B1, 28.10.2003 | |||
| ПОЗИЦИОННЫЙ ПНЕВМОГИДРАВЛИЧЕСКИЙ ПРИВОД | 1993 |
|
RU2065092C1 |
| ПОЗИЦИОННЫЙ ПРИВОД | 1993 |
|
RU2106543C1 |
| Позиционный пневмогидравлический привод | 1981 |
|
SU994816A1 |

