Изобретение относится к приборостроению и может быть использовано при балансировке роторов, анализе и записи вибрации.
Известно устройство для измерения дисбаланса роторов [1], содержащее вычислитель и соединенные с ним рядом блоков датчик вибрации, датчик метки, аналого-цифровой преобразователь (АЦП), индикатор и другие элементы.
Известное устройство обеспечивает достаточную точность в стационарных условиях, но дает значительные погрешности при балансировке роторов в условиях эксплуатации, когда большое количество случайных и систематических помех искажают сигнал дисбаланса, измеряемый на опоре или корпусе ротора. В этом случае требуется выполнять более тонкий анализ вибрации ротора, что известное устройство выполнить не в состоянии.
Целью изобретения является повышение точности при работе в нестационарных условиях и расширение функциональных возможностей устройства.
Это достигается тем, что измеритель дисбаланса, содержащий датчик вибрации, АЦП, датчик метки, тактовый генератор, блок управления и индикации и соединенный с ними вычислитель, снабжен вторым датчиком вибрации, последовательно соединенными с АЦП управляемым переключателем выбора каналов, буферным усилителем, двумя интеграторами, управляемым переключателем, перестраиваемым фильтром, управляемым усилителем, нормализатором, блоком выборки хранения. Измеритель дисбаланса также снабжен тремя шинами: адресной, данных и управления и параллельно подключенными к ним регистром, считывания, таймером, портом, тактовым генератором, двумя блоками постоянно запоминающего устройства (ПЗУ), блоком оперативно-запоминающего устройства (ОЗУ). Вычислитель и блок управления и индикации параллельно подключены к трем шинам, тактовый генератор дополнительно соединен таймером, управляющий выход таймера соединен со схемой выборки и хранения и АЦП, последний выходом соединен с регистром считывания. Управляющие выходы регистра управления соединены с управляемым переключателем выбора каналов, управляемым переключателем, перестраиваемым фильтром, управляемым усилителем. Перестраиваемый фильтр выполнен в виде последовательно соединенных блоков сумматора, первого управляемого кодом регистра, интегратора, второго управляемого кодом резистора интегратора, связанных дополнительными обратными связями с выхода каждого из интеграторов с дополнительными входами сумматора, а дополнительные входы каждого из управляемых кодом резисторов соединены с управляющими линиями регистра управления. Управляемый усилитель выполнен в виде последовательно соединенных регулируемого кодом резистора и регулируемого усилителя, связанных обратной связью, соединяющей выход регулируемого усилителя с дополнительным входом регулируемого кодом резистора, а другие дополнительные входы регулируеморго кодом резистора и регулируемого усилителя соединены с управляющими выходами регистра управления.
На чертеже представлена структурная схема измерителя дисбаланса.
Измеритель дисбаланса содержит два датчика 1, 2 вибрации, которые могут иметь любое исполнение, например в виде пьезо-, индуктивного, индукционного, емкостного или оптического датчика. Датчики подключены к управляемому переключателю 3 выбора каналов, на вход которого пропускается сигнал одного из датчиков. Управляемый переключатель 3 выбора каналов соединен с буферным усилителем 4, который согласует измерительную цепь устройства с характеристиками конкретных датчиков. Интеграторы 5 и 6 последовательно выполняют первичное и вторичное интегрирование сигнала с датчиков. Управляемый переключатель 7 соединен непосредственно с каждым из интеграторов 5, 6 и с буферным усилителем 4. Выход управляемого переключателя 7 соединен с входом перестраиваемого фильтра 8. Перестраиваемый фильтр состоит из последовательно соединенных сумматора 9, первого регулируемого кодом резистора 10, первого интегратора 11, второго регулируемого кодом резистора 12 и второго интегратора 13. При этом выходы интеграторов 11 и 13 соединены обратными связями с входами сумматора 9. Выход перестраиваемого фильтра соединен с входом управляемого усилителя 14, состоящего из регулируемого кодом резистора 15 и последовательно соединенного с ним регулируемого усилителя 16, выход которого линией обратной связи соединен с дополнительным входом регулируемого кодом резистора 15. Выход управляемого усилителя соединен с входом нормализатора 17, который последовательно соединен с блоком 18 выборки и хранения и АЦП 19. АЦП 19 соединен информационной шиной 20 с регистром считывания 21. Входы-выходы регистра считывания параллельно соединены с тремя шинами данных 22, адресов 23 и управления 24. Аналогично с указанными тремя шинами параллельно соединены вычислитель 25, таймер 26, регистр управления 27, два блока постоянного запоминающего устройства 28 и 29, блок оперативного запоминания устройства 30, а также блок 31 индикации и управления. Измеритель дисбаланса также содержит датчик 32 метки фотоэлектрического или электродинамического типа, соединенный последовательно с усилителем 33 и вычислителем 25 и тактовый генератор 34. Тактовый генератор соединен с вычислителем 25 и таймером 26 и может быть выполнен на основе кварцевого генератора с частотой 10 МГц. Выход таймера 26 соединен с управляющими входами блока 18 выборки и хранения и АЦП 19. Выходы регистра управления 27 соединены с управляющими входами управляемых переключателей 3 и 7, регулируемых кодом резисторов 10, 12 и 15, регулируемого усилителя 16.
Измеритель дисбаланса работает в следующих режимах: измерение значения и угла дисбаланса с одновременным измерением частоты вращения; двух или многоплоскостная балансировка роторов в собственных опорах методом пробных грузов или по известным коэффициентам влияния; измерение и анализ общего уровня и мощности вибрации в заданном частотном диапазоне (гармонический и частотный спектральный анализ); запись и хранение измеренных данных по дисбалансу, вибрации и спектрам, а также просмотр записанных данных и передача их через интерфейс в персональный компьютер для обработки и прогнозирования изменения дисбаланса и вибрации. Выбор режима работы задается блоком 31 индикации и управления в соответствии с программным обеспечением, заложенным в ПЗУ 28 и 29.
Измеритель дисбаланса работает следующим образом.
Сначала в блоке 31 задаются режим работы и коэффициенты чувствительности одного или каждого из двух датчиков 1, 2 вибрации в зависимости от схемы измерения дисбаланса или вибрации. Затем через управляемый регистр управления 27 переключатель 3 выбора каналов производится подключение одного из датчиков вибрации 1, 2 к измерительной цепи прибора. Далее задается размерность измерения: смещение, скорость или ускорение, что определяется включением соответствующего канала управляемого переключателя 7, управляющий сигнал на который передается через регистр управления 27. Затем устанавливается параметр измеряемого сигнала: амплитуда, размах или среднеквадратичное значение, который реализуется вычислителем 25 с помощью специальных программ, заложенных в ПЗУ 28 и 29. Такт работы вычислителя и таймера 26 задается тактовым генератором 34, далее при нестабильности вибросигнала включается программа осреднения, заложенная в ПЗУ, позволяющая повысить точность измерения дисбаланса, его угла и параметров вибрации. При измерении дисбаланса в одной плоскости сигнал с соответствующего датчика вибрации через переключатель 3 выбора каналов поступает на буферный усилитель 4 и интеграторы 5 и 6. В зависимости от установленной размерности управляемый переключатель 7 пропускает сигнал либо с буферного усилителя 4, либо с одного из интеграторов 5, 6. Затем сигнал проходит перестраиваемый фильтр 8, который служит для очистки сигнала от паразитных гармоник высших порядков. Управляющие сигналы от вычислителя на регулируемые кодом резисторы 10 и 12 фильтра подаются через регистр управления 27 в соответствии с частотой вращения ротора и частотой квантования вибросигнала. После перестраиваемого фильтра сигнал поступает на вход управляемого усилителя 14, управляющие сигналы от вычислителя 25 на регулируемый усилитель 14 передаются через шины 22, 23, 24 и регистр управления 27. Управляемый усилитель 14 обеспечивает постоянный уровень сигнала на своем выходе независимо от уровня сигнала на входе, т.е. обеспечивает автоматическое отслеживание уровня измеряемого сигнала. Далее
сигнал проходит нормализатор 17 с постоянным коэффициентом усиления и поступает в блок 18 выборки и хранения. В момент получения импульса от таймера 26 блок 18 запоминает и хранит до прихода следующего импульса мгновенное значение уровня вибрации. Полученное значение аналогового сигнала АЦП 19 превращает в цифровой код и по информационной шине 20 передает его в регистр считывания 21, который запоминает состояние шины данных вычислителя 25 и выдает на эту шину запомненный сигнал. По шине данных информация о мгновенном значении дисбаланса поступает в вычислитель 25 и обрабатывается в соответствии с одной из программ, записанных в ПЗУ. Таймер 26 в зависимости от частоты вращения ротора задает время выборки сигнала и период между выборками. Одновременно сигнал датчика 32 метки после усиления в усилителе 33 также поступает в вычислитель 25. Этот сигнал является исходным для срабатывания таймера и расчета угла дисбаланса. Вычислитель 25 обрабатывает сигнал с датчика вибрации 1, 2 и, с учетом информации датчика метки 32, выдает значение дисбаланса, его угол и частоту вращения ротора на экране дисплея в блоке 31 индикации и управления. При использовании режима осреднения вычислитель 25 выдает среднее значение дисбаланса и его угла по числу выборок. Это позволяет устранить влияние помех и случайных колебаний от элементов привода ротора, муфт и подшипников на точность определения дисбаланса. Затем производится пуск ротора с пробным грузом и вычислитель 25 выдает на экран дисплея положение и величину корректирующей массы, которую нужно установить в плоскости коррекции для устранения дисбаланса.
При балансировке ротора в двух плоскостях производят последовательно измерение дисбаланса в месте установки каждого из датчиков 1 и 2 вибрации и, если коэффициенты влияния не известны, то проводят два пуска с пробными грузами. По установленным коэффициентам в соответствии с одной из программ в ПЗУ 29, вычислитель 25 определяет место и величину корректирующих масс для устранения дисбаланса.
Для определения источников вибрации ротора и определения субгармонических составляющих вибрации, влияющих на определение дисбаланса, вычислитель 25 выполняет расчет и построение на экране дисплея гармонического спектра вибросигнала.
Для детального анализа вибросостояния ротора или другого исследуемого объекта вычислитель 25 проводит расчет и построение на экране дисплея частотного спектра вибросигнала. При этом отключается датчик метки 32 и вычислитель 25 выполняет аналитические действия только по сигналу тактового генератора 34.
Любая информация, выдаваемая вычислителем 25 (характеристики дисбаланса, вибрации, спектры) может быть записана в ОЗУ 30 по команде из блока 31 и храниться под своим номером кадра сколь угодно долго. Эту информацию можно вызвать по номеру кадра на экран дисплея для просмотра, а также можно передать через интерфейс в персональный компьютер для статистической обработки, прогнозирования вибросостояния объекта, хранения данных и распечатки на бумажный носитель для формирования документов о результатах балансировки и вибродиагностики. Выборочно кадры информации могут при необходимости стираться.
Таким образом благодаря использованию управляемых с пульта и вычислителем элементов измеритель дисбаланса автоматически настраивается на измеряемый сигнал и поэтому обладает более высокой точностью и помехоустойчивостью в условиях нестационарной эксплуатации измерителя, а также обладает более широкими функциональными возможностями по измерению вибрации, выполнению гармонического и спектрального анализа, накоплению и хранению экспериментальных результатов. Данное техническое решение обеспечивает изменение и расширение функций измерителя программными средствами без изменения структуры измерителя и его элементов.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВИБРАЦИИ РОТОРНЫХ МЕХАНИЗМОВ | 1992 |
|
RU2057309C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВИБРАЦИИ РОТОРНЫХ МЕХАНИЗМОВ | 1992 |
|
RU2057310C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВИБРАЦИИ РОТОРНЫХ МЕХАНИЗМОВ | 1992 |
|
RU2073835C1 |
| ВИБРОМЕТР | 1994 |
|
RU2046301C1 |
| Устройство для балансировки | 1991 |
|
SU1793291A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2208771C2 |
| Автодинное устройство | 1991 |
|
SU1811614A3 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 2013 |
|
RU2534955C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1999 |
|
RU2159331C1 |
| ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА | 2013 |
|
RU2536434C2 |
Использование: изобретение может быть использовано для определения дисбаланса, измерения и анализа колебаний, записи и хранения виброинформации. Сущность: измеритель содержит два датчика 1 и 2 вибрации, буферный усилитель и интеграторы 5 и 6, АЦП 19 и считывания регистр 21, соединенные последовательно. Вычислитель 25, таймер 26, ПЗУ 28 и 29, ОЗУ 30 и блок управления и индикации 31 подключены параллельно к трем шинам 24, 23, 22 управления, данных и адресной. Датчик метки 32 подключен через усилитель 33 непосредственно к вычислителю 25. Тактовый генератор 34 выдает тактовую частоту на вычислитель 25 и таймер 26. Вычислитель управляет перестраиваемым фильтром 8 и управляемым усилителем 14 через регистр управления 27. Измеритель определяет величину и угол дисбаланса, частоту вращения выполняет гармонический и спектральный анализ вибросигнала, записывает информацию в ОЗУ, выполняет расчеты по определению коэффициентов влияния при балансировке и расчеты корректирующих масс при одно- и многоплоскостной балансировке. 2 з.п. ф-лы, 1 ил.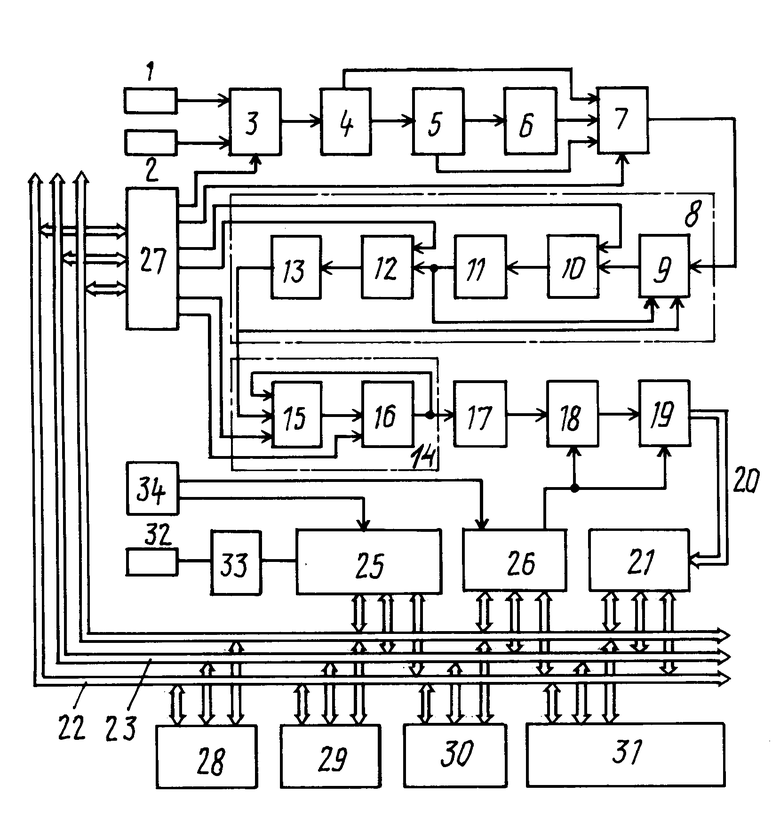
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США N 4063461, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
