Изобретение относится к точному приборостроению и может быть использовано для обследования нефтяных, газовых и геофизических скважин.
Известен способ непрерывного обследования скважины посредством гироскопического инклинометра (патент РФ N 2004786, МКИ E 21 В 47/02, Бюл. N 45 и 46, 15.12.93). Указанный способ основан на измерении ускорений относительно двух взаимно перпендикулярных осей, измерение угловых скоростей относительно двух взаимно перпендикулярных осей, совпадающих с осями измерения ускорений, на измерении угла поворота скважинного прибора относительно стабилизированного в плоскости горизонта и в азимуте направления, построенного трехстепенным гироскопом.
При этом в режиме начальной выставки используют все пять вышеназванных операций в сочетании с алгоритмами, которые по структуре представляют тригонометрические уравнения, соответствующие сигналам измерения угловых скоростей и выражение для вычисления кардановой погрешности, в которое входят зенитные и апсидальные углы, определяемые измерением ускорений и угол поворота скважинного прибора вокруг продольной оси относительно стабилизированного направления. В результате работы алгоритма начальной выставки определяется азимут стабилизированного направления (азимут главной оси трехстепенного гироскопа). В режиме измерения параметров ориентации скважины (азимута и зенитного угла) при непрерывном движении скважинного прибора используются операции измерения ускорений, измерения угла поворота скважинного прибора вокруг продольной оси, вычисленное и запоминаемое в режиме начальной выставки значение азимута главной оси гироскопа, а также алгоритмы формирования азимута и зенитного угла скважины. Так как, при этом азимут скважины измеряют в горизонтальной плоскости, а угол поворота скважинного прибора - вокруг продольной оси, отклоненной от местной вертикали на зенитный угол, то для компенсации методической погрешности измерения основу алгоритма составляет тригонометрическое выражение для вычисления кардановой погрешности. При формировании азимута скважины (плоскости наклонения) осуществляется алгоритмическая компенсация вертикальной составляющей угловой скорости вращения Земли и систематической составляющей угловой скорости дрейфа гироскопа.
Однако в данном способе измерения ускорений осуществляются измерителями ускорений, жестко закрепленными на корпусе скважинного прибора, что порождает дополнительные погрешности в режиме непрерывного измерения, так как измерители ускорений участвуют во вращении скважинного прибора вокруг продольной оси.
Наиболее близким является способ определения азимута и зенитного угла скважины посредством гироскопического инклинометра (патент РФ N 2100594, МКИ E 21 B 47/02, Бюл. N 36 от 27.12.97), взятый за прототип, включающий измерение ускорений по двум взаимно перпендикулярным осям, измерение угловой скорости относительно одной из вышеназванных осей, стабилизацию указанных осей относительно оси, совпадающей с продольной осью скважинного прибора, измерение угла поворота корпуса прибора относительно этих осей.
При этом в режиме начальной выставки указанные оси вращают вокруг оси стабилизации с постоянной скоростью на заданный угол, измеряют в последовательных положениях угол поворота этих осей относительно корпуса, горизонтальную составляющую угловой скорости вращения Земли совместно с угловой скоростью дрейфа гироскопа относительно оси, совпадающей с осью чувствительности измерителя угловой скорости, по результатам измерений вычисляют среднюю угловую скорость вращения платформы, систематическую составляющую дрейфа гироскопа и формируют эталонную модель измеряемой угловой скорости, для оценки фазового сдвига, вычисляют функцию невязки, которую минимизируют по фазовому сдвигу и определяют азимутальный угол осей чувствительности измерителей ускорений в момент окончания выставки. В режиме работы формируют по результатам режима начальной выставки матрицу ориентации, измеряют ускорения по указанным осям, измеряют угловую скорость относительно одной из названных осей, формируют по результатам измерений на каждом такте приращение матрицы ориентации и по соответствующим элементам матрицы ориентации определяют азимутальный и зенитные углы.
Однако данный способ имеет ряд недостатков, а именно: ограниченную область применения, что обусловлено тем, что при зенитном угле 90o уравнения ориентации имеют особую точку, практически при зенитном угле 75o влияние погрешностей элементов (в первую очередь дрейф гиростабилизатора) на ошибки гироинклинометра становится недопустимо большим; недостаточно высокую точность измерения, что обусловлено тем, что при произвольной ориентации в пространстве дрейф трехстепенного гироскопа содержит, кроме известных компонентов (дрейф от небаланса, радиальной и квадратурной составляющих дрейфа), также нелинейные компоненты, являющиеся функцией от двух компонентов ускорения (наиболее известен среди них дрейф от трения-качения).
Кроме того, в данном способе длительность такта работы считается константой, а в общем случае, на эту длительность влияют, как сбои обмена, вызванные в основном наличием геофизического коллектора, так и внутренние немаскируемые прерывания наземного вычислителя, например, такие как "Авария источника питания", что вызывает изменение длительности такта, соответственно изменение масштаба, что и приводит, в конечном итоге, к снижению точности измерения, к аналогичному результату приводит отсутствие компенсации температурных погрешностей, в первую очередь акселерометров.
Известен также инклинометр гироскопического типа (патент РФ N 2004786, МКИ E 21 В 47/02, Бюл. N 45 и 46 от 15.12.93), содержащий наземный вычислитель и связанный с ним каротажным кабелем скважинный прибор, содержащий жестко закрепленный на корпусе измеритель ускорений по двум взаимно перпендикулярным осям и измеритель угловой скорости по двум взаимно перпендикулярным осям, например, на основе динамически настраиваемого гироскопа, оси чувствительности которых параллельны и перпендикулярны продольной оси скважинного прибора, трехстепенный гироскоп с датчиком угла по внешней оси, направленной по продольной оси скважинного прибора, и контуром коррекции для горизонтирования главной оси гироскопа в режиме выставки.
Выходы двухкомпонентных измерителей ускорений и угловых скоростей, выход датчика угла трехстепенного гироскопа соединены каротажным кабелем с наземным вычислителем, снабженным блоком компенсации видимого ухода гироскопа и систематической составляющей его дрейфа, а также задатчиком режимов работы выставка - движение.
Данный инклинометр имеет ряд недостатков, так как измерители ускорений жестко закреплены на корпусе скважинного прибора, то в режиме непрерывного движения скважинного прибора в скважине возникают дополнительные погрешности, обусловленные его вращением вокруг продольной оси, кроме того, при автоматической компенсации угловой скорости дрейфа трехстепенного гироскопа не учитывается, что при изменении зенитного угла будет изменяться угол между осью ротора и осью наружной рамки гироскопа, влияющий на величину дрейфа, что не отражено в алгоритме.
Наиболее близок гироскопический инклинометр (патент РФ N 2100594, МКИ 6 E 21 В 47/02, Бюл. N 36, 27 от 12.06.97), содержащий скважинный прибор, соединенный каротажным кабелем с наземным вычислителем, причем скважинный прибор содержит одноосный гиростабилизатор, на платформе которого жестко установлены два измерителя ускорений с взаимно перпендикулярными осями чувствительности, ориентированными перпендикулярно оси стабилизации гиростабилизатора, и трехстепенной гироскоп, первый датчик угла на измерительной оси гироскопа подключен через усилитель контура измерения угловой скорости к второму датчику момента по перпендикулярной датчику угла оси, второй датчик угла гироскопа через усилитель контура стабилизации соединен с двигателем отработки, кинематически связанным с осью стабилизации, на которой закреплен выходной датчик угла, например, в виде синусно-косинусного трансформатора, выходы которого через соответствующий канал измерения угла подключены к соответствующим входам блока цифровой обработки, на остальные входы которого поданы соответствующие сигналы с измерителей ускорения, датчика температуры и измерителя угловой скорости, причем первый выход блока цифровой обработки соединен с входом задатчика эталонного тока, выход которого подключен к первому датчику момента гироскопа, расположенному на оси, перпендикулярной оси стабилизации, второй и третий выходы блока цифровой обработки соединены с каротажным кабелем.
Однако данное устройство имеет ограниченную область применения и недостаточно высокую точность, кроме того, опыт эксплуатации показал, что данное устройство имеет недостаточно высокие технико-экономические показатели, в основном, такие как: надежность, ремонтопригодность и большая трудоемкость изготовления, обусловленные применением микросборок, сложность конструкции, обусловленную большим количеством модулей и межмодульных связей.
Цель изобретения - повышение точности определения азимутального и зенитного углов, расширение области применения и повышение технико-экономических показателей устройства.
Поставленная цель достигается тем, что в способе определения азимута и зенитного угла скважины посредством гироскопического инклинометра, включающем измерение ускорения силы тяжести по двум взаимно перпендикулярным осям посредством акселерометров, измерение угловой скорости относительно одной из вышеназванных осей посредством трехстепенного гироскопа, измерение температуры, стабилизацию осей чувствительности акселерометров и гироскопа относительно оси, совпадающей с продольной осью скважинного прибора посредством одноосного гиростабилизатора, измерение угла поворота корпуса скважинного прибора относительно этих осей посредством синусно-косинусного трансформатора, определение начальной ориентации осей чувствительности акселерометров в азимуте, формирование матрицы ориентации, вычисление на каждом такте работы вычислителя при движении скважинного прибора в скважине азимута и зенитного угла, например, по формулам
αi+1 = arctg (b23 i+1/b21 i+1), [рад];
где i+1 - текущий такт работы;
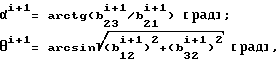
bi+1, l, g  элементы матрицы ориентации Bi+1, которую формируют в виде произведения матриц Bi+1 = Δ Bi+1 • Bi, где Bi, Bi+1 - матрицы ориентации на предыдущем и текущем такте работы вычислителя
элементы матрицы ориентации Bi+1, которую формируют в виде произведения матриц Bi+1 = Δ Bi+1 • Bi, где Bi, Bi+1 - матрицы ориентации на предыдущем и текущем такте работы вычислителя
- приращение матрицы ориентации, элементы которой определяют в зависимости от углов ориентации Qx, Qy, Qz, причем начальное значение матрицы ориентации равно
где αxb - азимутальный угол осей чувствительности акселерометров в момент окончания выставки.
Дополнительно измеряют ускорение силы тяжести по третьей ортогональной оси, измеряют длительность такта работы, осуществляют операцию нормирования информации гироскопа, акселерометров и датчика угла поворота путем вычисления коэффициента нормирования по формуле
n = τ/τi+1,
где τ - заданная длительность такта работы, [с];
τi+1 - длительность данного такта работы, [с];
и вычисления произведений
ni+1 • Nj i+1,
где Nj i+1 - коды измеренных значений с гироскопа, акселерометров и датчика угла поворота, производят компенсацию температурных составляющих угловой скорости и ускорения, контролируют предыдущую величину зенитного угла θi и текущую проекцию axi+1 ускорения силы тяжести, формируют управляющее воздействие на гироскоп по стабилизированной оси таким образом, что бы ось его кинетического момента находилась вблизи плоскости горизонта, вводят добавки, компенсирующие дрейф одноосного гиростабилизатора и определяют угол поворота Qy по формуле
Q
Wупр i+1 - скорость управления гиростабилизатором, с-1;
Wдпр i+1 - прогноз величины дрейфа гиростабилизатора, с-1;
Ω
Определяют углы ориентации Qx i+1, Qz i+1 по формулам
Qx i+1 = (-b32 i+1 + b32 i - Qy i+1b12 i)/(b22 i+1 + b22 i)/2
при θi≤ θ1 или θi≥ θ2,
Qz i+1 = (b12 i+1 - b12 i - Qy i+1b32 i)/(b22 i+1 + b22 i/2
Qz i+1 = τi+1 (Wz i+1 - Wz3 i+1 - Wдрг i+1)
при θ2> θi> θ1,
Qx i+1 = (b22 i+1 - b22 i + Qz i+1b12 i)/(b32 i+1 + b32 i)/2,
где b32 i+1 = azi+1/g; b12 i+1 = axi+1/g; b22 i+1 = ayi+1/g при θ2> θi> θ1 или
элементы матрицы ориентации, формируемые по результатам измерения проекций axi+1, ayi+1, azi+1 ускорения силы тяжести g, при этом θ1,θ2 - константы, sign(cos θi) - определяет знак,
Wz i+1 - измеренное значение угловой скорости, c-1;
Wz3 i+1 - проекция угловой скорости Земли на измерительную ось, c-1;
Wдрг i+1 - дрейф гироскопа по соответствующей оси, с-1.
Вычисляют значение зенитного угла по вышеуказанной формуле при θi≥ θ2 θi≤ θ1 или по формуле
В соответствии со способом был разработан гироскопический инклинометр, в котором поставленная цель достигается тем, что в гироскопический инклинометр, содержащий наземный вычислитель, соединенный каротажным кабелем со скважинным прибором, содержащим блок обработки информации, включающий однокристальную ЭВМ и приемопередатчик, одноосный гиростабилизатор, на платформе которого установлены два акселерометра со взаимно ортогональными осями чувствительности, ориентированными перпендикулярно оси стабилизации гиростабилизатора и трехстепенной гироскоп с датчиками угла и момента, двигатель отработки, кинематически связанный с осью стабилизации, на которой закреплен выходной датчик угла в виде синусно-косинусного трансформатора, задатчик эталонного тока, один из входов которого соединен с выходной шиной блока цифровой обработки, а выход подключен к одному из датчиков момента гироскопа, датчик температуры, причем шина ввода-вывода блока цифровой обработки является выходом скважинного прибора, отличающийся тем, что снабжен модулем измерения угловой скорости и стабилизации, модулями преобразователей ускорений и угла и установленным на платформе одноосного гиростабилизатора третьим акселерометром, ось чувствительности которого совпадает с осью стабилизации, а датчик температуры установлен на гироскопе, причем выходы всех акселерометров подключены к входам модуля преобразователей ускорений, второй вход задатчика эталонного тока соединен с выходной шиной блока цифровой обработки, к дополнительной входной шине которого подключены датчик температуры и встроенные датчики температуры акселерометров, при этом датчики угла гироскопа соединены со входами модуля измерения угловой скорости и стабилизации, подключенного своими выходами соответственно к объединенным обмоткам возбуждения датчиков угла, к датчику момента гироскопа по перпендикулярной соответствующему датчику угла оси, к входной шине блока цифровой обработки и к двигателю обработки, обмотка возбуждения и выходы синусно-косинусного трансформатора подключены к модулю преобразователей угла, соединенному со входной шиной блока цифровой обработки, к которой подключены также выходы модуля преобразователей ускорений, причем входы синхронизации модулей преобразователей угла и ускорения и модуля измерения угловой скорости и стабилизации объединены и подключены к выходной шине блока цифровой обработки, с которой соединен второй вход задатчика эталонного тока, выходы которого подключены ко второму датчику момента гироскопа.
Кроме того, в блок цифровой обработки дополнительно введено перепрограммируемое запоминающее устройство (ППЗУ) с последовательным вводом-выводом, причем выводы Р2.0 и Р2.1 порта Р2 однокристальной ЭВМ запрограммированы на асинхронный ввод-вывод и подключены через приемопередатчик к шине ввода-вывода блока цифровой обработки, выводы Р6.4 - Р6.7 порта Р6 запрограммированы на синхронный ввод-вывод и соединены с ППЗУ, выводы Р1.0 - Р1.5 порта Р1 и Р0.4-Р0.7 порта Р0, запрограммированые на ввод, являются соответственно основной и дополнительной шинами блока цифровой обработки, а выводы Р2.5- Р2.7 порта Р2, запрограммированные на вывод, его выходной шиной.
Кроме того, модуль измерения угловой скорости и стабилизации имеет два канала, а именно: канал измерения угловой скорости, содержащий последовательно соединенные линейный дифференциальный преобразователь, устройство формирования амплитудно-частотной характеристики, усилитель мощности, преобразователь напряжение - частота и канал стабилизации платформы, содержащий последовательно соединенные второй линейный дифференциальный преобразователь, второе устройство формирования амплитудно-частотной характеристики и второй усилитель мощности, причем входы линейных дифференциональных преобразователей и вход синхронизации преобразователя напряжение - частота являются входами модуля измерения угловой скорости и стабилизации, а его выходами являются выход генератора опорного напряжения первого линейного дифференциального преобразователя, соединенный со входом синхронизации второго линейного дифференциального преобразователя, выходы первого и второго усилителей мощности и выход преобразователя напряжение - частота, кроме того, выход источника эталонного напряжения преобразователя напряжение - частота соединен через резистор с его же входом интегратора.
Кроме того, модуль преобразователей угла имеет два канала: канал преобразования sin, содержащий последовательно соединенные линейный дифференциальный преобразователь и преобразователь напряжение - частота; и канал преобразования cos, содержащий последовательно соединение второй линейный дифференциальный преобразователь и второй преобразователь напряжение - частота, причем первые входы линейных дифференциальных преобразователей и объединенные входы синхронизации преобразователей напряжение - частота являются входами модуля преобразователей угла, а его выходами являются: выход генератора опорного напряжения первого линейного дифференциального преобразователя, соединенный с его же вторым входом, входом синхронизации и вторым входом второго линейного дифференциального преобразователя; и выходы преобразователей напряжение - частота, кроме того, выходы источников эталонного напряжения преобразователей напряжение - частота через соответствующие резисторы соединены с их же входами интеграторов.
Кроме того, модуль преобразователей ускорений имеет три идентичных канала, причем каждый канал содержит последовательно соединенные фильтр низкой частоты и преобразователь напряжение - частота, причем входы фильтров низкой частоты и объединенные входы синхронизации преобразователей напряжение - частота являются входами модуля преобразователей ускорений, а выходы преобразователей напряжение - частота его выходами, при этом выходы источников эталонного напряжения преобразователей напряжение - частота через соответствующие резисторы соединены с их же входами интеграторов.
Кроме того, задатчик эталонного тока содержит источник опорного напряжения, аналоговый коммутатор и два выходных усилителя мощности, причем входы управления аналогового коммутатора являются входами задатчика эталонного тока, его соответствующие входы соединены с источником опорного напряжения, а выходы подключены ко входам усилителей мощности, выходы которых являются выходами задатчика эталонного тока.
Сущность изобретения поясняется чертежами, приведенными на фиг. 1 - 7,
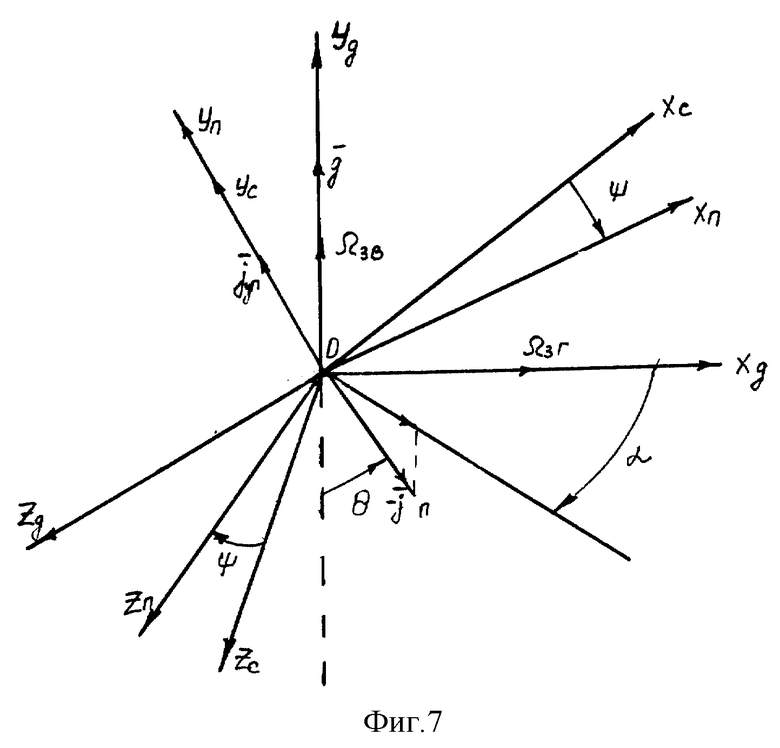
где фиг. 1 - кинематическая схема и блок схема скважинного прибора с наземным вычислителем (блоки питания условно не показаны);
фиг. 2 - блок-схема блока цифровой обработки;
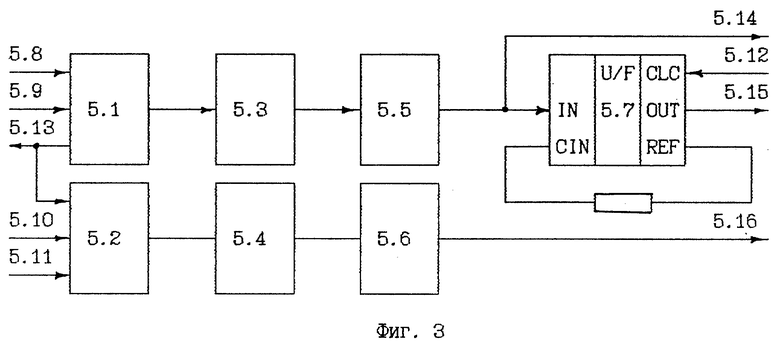
фиг. 3 - блок-схема модуля измерения угловой скорости и стабилизации;
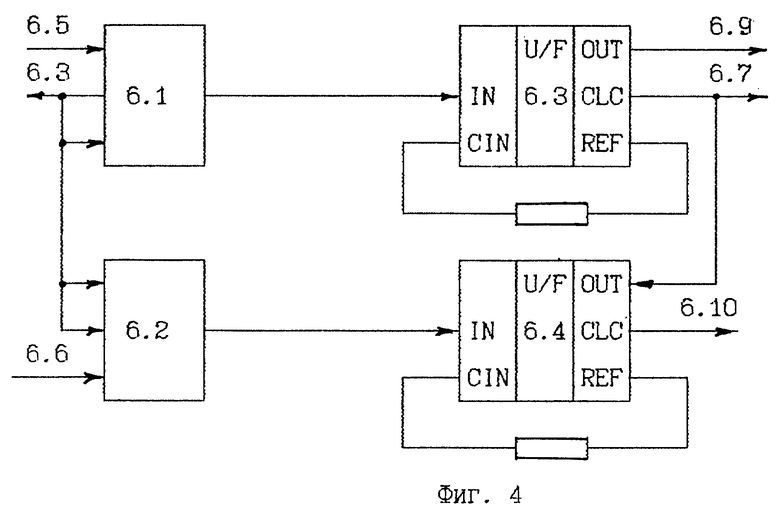
фиг. 4 - блок-схема модуля преобразователей угла;
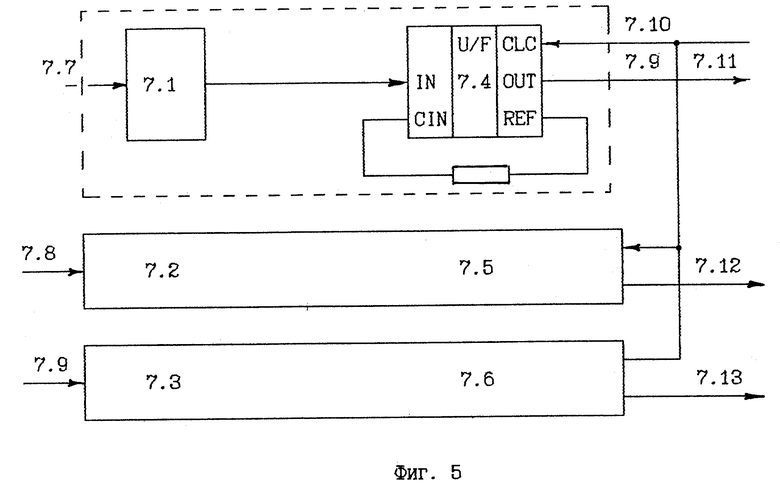
фиг. 5 - блок-схема модуля преобразователей ускорений;
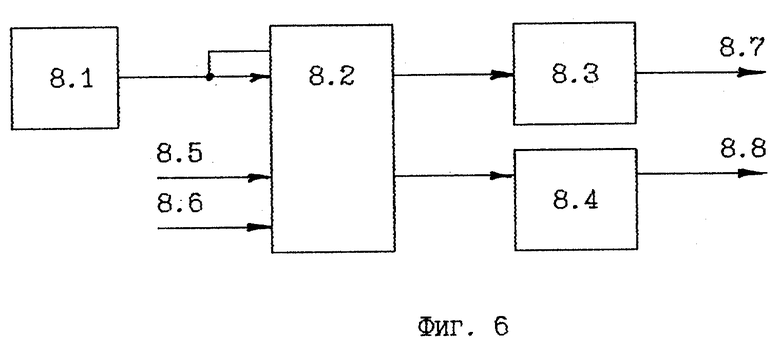
фиг. 6 - блок-схема задатчика эталонного тока;
фиг. 7 - взаимное положение систем координат в произвольной точке скважины.
На чертежах введены следующие обозначения:
1 - наземный вычислитель, например, PC-486 типа NOTE BOOK;
2 - каротажный кабель, который осуществляет спуск-подъем скважинного прибора, подачу электропитания и прием/передачу информации последовательным кодом;
3 - скважинный прибор;
4 - блок цифровой обработки, при этом:
4.1 - входная шина блока цифровой обработки;
4.2 - выходная шина блока цифровой обработки;
4.3 - дополнительная входная шина блока цифровой обработки;
4.4 - шина ввода-вывода блока цифровой обработки;
4.5 - однокристальная ЭВМ, например, типа LN87C196NT, она имеет внутреннее однократно программируемое ПЗУ емкостью 32 кбайт, асинхронный последовательный порт, синхронный последовательный порт блок процессоров событий, встроенное АЦП;
4.6 - приемопередатчик, его можно реализовать на оптронах;
4.7 - ППЗУ с последовательным вводом-выводом, например, типа SPM28L10M, оно имеет 1 кбайт памяти;
5 - модуль измерения угловой скорости и стабилизации, при этом:
5.1, 5.2 - линейные дифференциальные преобразователи, например, типа АД598, они имеют встроенный генератор опорного напряжения, демодуляторы, фильтры, масштабирующий усилитель;
5.3, 5.4 - устройства формирования амплитудно-частотной характеристики, их можно выполнить на активных фильтрах пробках, настроенных на частоту вращения двигателя гироскопа и частоту нутации гироскопа;
5.5, 5.6 - выходные усилители мощности, например, типа АД815;
5.7 - преобразователь напряжение - частота, например, типа АД652, он имеет встроенный источник опорного напряжения, интегратор и блок синхронизации;
5.8-5.12 - входы модуля измерения угловой скорости и стабилизации;
5.13-5.16 - выходы модуля измерения угловой скорости и стабилизации;
6 - модуль преобразователей угла, при этом:
6.1, 6.2 - линейные дифференциальные преобразователи, например, типа АД698, они имеют встроенный генератор опорного напряжения, демодуляторы, фильтры, масштабирующий усилитель;
6.3, 6.4 - преобразователи напряжение - частота, типа АД652;
6.5 - 6.7 - входы модуля преобразователей угла;
7 - модуль преобразователей ускорений, при этом:
7.1 - 7.3 - фильтры низкой частоты, их можно выполнить на активных фильтрах второго порядка;
7.4 - 7.6 - преобразователи напряжение - частота, типа АД652;
7.7 - 7.10 - входы модуля преобразователей ускорений;
7.11 - 7.13 - выходы модуля преобразователей ускорений;
8 - задатчик эталонного тока, при этом:
8.1 - источник опорного напряжения;
8.2 - аналоговый коммутатор;
8.3, 8.4 - выходные усилители - мощности, типа АД815;
8.5, 8.6 - входы задатчика эталонного тока;
8.6 - 8.8 - выходы задатчика эталонного тока;
9 - датчик угла поворота платформы, например, одноканальный синусно-косинусныый трансформатор, типа СКТ-3250;
10 - платформа гиростабилизатора, ось подвеса ОУп которой совпадает с продольной осью ОУс скважинного прибора;
11 - 13 - акселерометры, например, типа АТ-1104, они имеют встроенные датчики температуры;
14 - измеритель угловой скорости на базе трехстепенного гироскопа, например, типа Д-7-03, при этом:
14.1, 14.2 - датчики угла гироскопа;
14.3, 14.4 - датчики момента гироскопа;
14.5 - датчик температуры гироскопа;
14.6 - ротор трехстепенного гироскопа;
14.7, 14.8 - внутренняя и наружная рамки гироскопа соответственно;
15 - двигатель отработки, например, ДМ-5 (двигатель постоянного тока с возбуждением от постоянных магнитов).
Системы координат, принятые на фиг. 7, имеют следующие обозначения:
OXgYgZg - земная географическая система координат, причем ось OXg - ориентирована на север (N), ось OYg ориентирована по местной вертикали, ось OZg дополняет систему координат до правой.
OXcYcZc - система координат, связанная с корпусом скважинного прибора, причем ось OYc направлена по продольной оси скважинного прибора, ось OXс ориентирована вдоль нулевой риски статора датчика угла 9;
ось OZс - дополняет систему координат до правой;
ОХпYпZп - система координат, связанная с платформой 10 гиростабилизатора, причем ось OYп - ось стабилизации (ось подвеса платформы); OXп, OZп - стабилизированные оси, которые параллельны соответственно осям чувствительности акселерометров 11, 12 и ориентированы так, чтобы система координат, была правой.
Для пояснения существа изобретения, особенностей операций способа и работы приняты следующие обозначения:
ψ - угол поворота оси чувствительности измерителя угловой скорости относительно корпуса скважинного прибора (угол поворота платформы гиростабилизатора относительно оси стабилизации), [рад], при этом соответственно ψ1 - угол поворота соответствующий i измерению, [рад], причем i = 1 - n; αx - азимутальный угол оси измерителя угловой скорости (оси платформы ОХп гиростабилизатора, стабилизированных осей чувствительности акселерометров), [рад], при этом αxв - азимутальный угол в момент окончания выставки, [рад]; α - азимут скважины (угол между проекцией орта jyp на OXgZg и OZg), [рад]; θ - зенитный угол скважины, [рад]; Ω3в= Ω3sinϕ - вертикальная составляющая угловой скорости Земли, [с-1] ; Ω3г= Ω3cosϕ - горизонтальная составляющая угловой скорости Земли, [с-1].
Данный способ базируется на применении цифрового вычислителя, работающего в реальном масштабе времени, и предназначен для повышения точности и расширения области применения известного способа определения параметров ориентации при помощи ускорений в системе, стабилизированной по одной из осей с учетом известной начальной ориентации, заключающегося в следующем.
В режиме начальной выставки определяется азимутальный угол оси чувствительности гироскопа αxв в момент окончания выставки.
На начальном такте i = 0 матрица ориентации B0 = E, где E - единичная матрица, а начальное значение матрицы ориентации ΔB1 определяется матрицей
Исходя из того что приращение матрицы ориентации обусловлено малым поворотом на текущем i+1 такте, оно формируется в виде матрицы
элементы которой определяют в зависимости от углов ориентации Qx i+1, Qy i+1, Qz i+1, а матрица ориентации B на текущем такте формируется в виде
из которой азимут αi+1 и зенитный угол θi+1 можно определить, например, по формулам
αi+1 arctg(b23 i+1/b21 i+1), [рад]
Предлагаемый способ можно представить на текущем i+1 такте в виде следующих действий и операций:
1. По заданному количеству тактов внутреннего системного таймера наземный вычислитель выдает команду "Синхронизация", обеспечивая тем самым заданный интервал измерения, т.е. такт работы τi+1, (с), однако длительность τi+1, а следовательно, и точность измерения определяется не только количеством тактов внутреннего системного таймера, поскольку любое внутреннее немаскируемое прерывание наземного вычислителя, например, "Авария источника питания" и т. п., вызовет увеличение длительности τi+1 на время выполнения программы этого прерывания, кроме того, из-за наличия геофизического коллектора, возможны сбои обмена при передаче команды "Синхронизация" либо приема "Ответа" на нее, что также вызывает изменение длительности такта τi+1.
2. При получении "Ответа" наземный вычислитель выдает команду "Обмен" - получает "Ответ" и коды измеренных значений угловой скорости Ni+1w, ускорений Ni+1ax, Ni+1ay, Ni+1az, coответствующих температур Ni+1tw, Ni+1tax, Ni+1tay, Ni+1taz, a также коды Ni+1 sin ψ, Ni+1 cos ψ угла поворота ψi+1 и код Ni+1τ длительности такта τi+1.
3. Измерение температуры соответствующих датчиков осуществляется четырехканальным АЦП, т.е. измеряется мгновенное значение, соответственно коды температуры не зависят от длительности такта τi+1, поэтому температуру вычисляют по формуле
ti+1j = Ktj(Ni+1tj + Noj), [oC],
где j = w, ax, ay, az;
Ktj - цена младшего разряда соответствующего канала, [oC];
Ni+1tj - значение кода данного канала;
Noj - нулевой сигнал этого канала;
(Применение четырех каналов измерения температуры обусловлено большими градиентами температуры при движении прибора в скважинах с малыми зенитными углами до 50o существенно упрощает математическую модель погрешностей датчиков, как функцию температуры, за счет исключения члена eτt и гистерезиса, что облегчает компенсацию температурных погрешностей).
4. Преобразование в код угловой скорости, ускорений и угла поворота осуществляется с помощью преобразователей напряжение - частота (ПНЧ) (поскольку применение АЦП приводит к потере части информации на интервале измерения, что существенно снижает точность), таким образом, выходная информация - количество импульсов будет определяться формулой:
Ni+1j = fjτi+1,
где j - wi+1, axi+1, ayi+1, azi+1, sinψi+1,cosψi+1;
fj - выходная частота соответствующего ПНЧ, [с-1], т.е. является функцией не только fj, но и τi+1, поэтому вычисляют коэффициент нормирования по формуле
ni+1= τ/τi+1= τ/к Ni+1,
где τ - заданное время такта является константой, [с];
k - цена импульса канала измерения такта, [с],
и производят операцию нормирования, вычисляя произведение
ni+1•Ni+1 = fjτ, которое является только функцией fj, исключая тем самым влияние длительности такта τi+1 на точность измерения.
5 Вычисляют значение sinψi+1 и cosψi+1 (вычисление угла ψi+1, т.е. вычисление функции arctg, считается стандартной процедурой, поэтому не рассматривается) по формулам
sinψi+1 = K sin (ni+1 Nsini+1 + Nosin);
cosψi+1 = K cos (ni+1 Ncosi+1 + Nocos),
где Ksin, Kcos - цена импульса соответствующих каналов,
Nоsin, Nоcos - нулевой сигнал данных каналов.
Компенсация температурных составляющих в канале вычисления угла не производится по следующим причинам:
- данный канал используется в основном в режиме "Начальная выставка", а там нет таких больших градиентов температуры;
- температурные коэффициенты каналов измерения sinψi+1 и cosψi+1 весьма малы - порядка 50 промилле на oC и зависимость практически линейна;
- угол вычисляется по функции arctg, т.е. отношение, соответственно суммарный температурный коэффициент определяется отношением коэффициентов каналов, что уменьшает его как минимум на порядок.
6. Параметры каналов измерения угловой скорости и ускорений в зависимости от температуры с достаточной точностью аппроксимируются линейными функциями, поэтому вычисление угловой скорости wi+1, [с-1] и ускорений axi+1, [мo -2], ayi+1, [м•с-1], azi+1, [м•с-2] производится по формуле
ji+1 = Kj(l+Kti+1)[ni+1 Ni+1 + Noj(1 + Kti+1)],
где j - wi+1, axi+1, ayi+1, azi+1;
Kj - цена импульса соответствующего канала, [с-1] для wi+1 и [м•с-2] для axi+1, ayi+1, azi+1;
Ktj - температурная поправка цены импульса, [1/oC];
Noj - нулевой сигнал данного канала;
Koj - температурная поправка нулевого сигнала, [1/oC].
Компенсируя таким образом влияние температуры на точность измерения, необходимость компенсации температурных погрешностей обусловлена также тем, что в связи с расширением области применения, т.е. возможностью работать при неограниченных зенитных углах, при зенитном угле выше 75o технология продвижения прибора такова, что требует значительного времени, в связи с чем температурный диапазон работы прибора значительно расширяется и, если при зенитных углах до 50o за счет высокой скорости прибора максимум температуры внутри прибора на 30oC-40oC меньше максимума температуры в скважине, то при углах выше 75oC температура внутри прибора практически соответствует температуре в скважине.
7. Вычисляют элементы матрицы ориентации по формулам
b12 i+1 = axi+1/g; b32 i+1 = azi+1/g,
где g - ускорение силы тяжести.
8. Производят операцию контроля предыдущего значения зенитного угла θi, проверяя выполнение условий
θi≤ θ1;θi≥ θ2;θ2> θi> θ1,
где θ1,θ2 - константы θ1= 45o, θ2= 135o.
(Выбор данных значений обусловлен тем, что они обеспечивают минимизацию погрешности при переходе с акселерометров по осям ОХп, OZп на акселерометр по оси OYп при вычислении элементов матрицы ориентации и углов ориентации).
9. Вычисляют элемент b22 i+1 матрицы ориентации по формулам
где sign(cos θi ) - определяет знак или
b22 i+1 = ayi+1/g при θ2> θi> θ1.
10. Вычислят угол Qy i+1 по формуле
Qy i+1 = τi+1 (Wупр i+1 + Wдр i+1 - Ω
где Wупр i+1 - скорость управления гиростабилизатором (формируется в результате контроля положения оси кинетического момента гироскопа на предыдущем такте), [с-1].
Wдр i+1 - прогноз величины дрейфа платформы гиростабилизатора, поскольку ось кинетического момента гироскопа находится вблизи плоскости горизонта, математическая модель гироскопа существенно упрощается и дрейф платформы гиростабилизатора вычисляется по формуле
Wдр i+1 =Wo п + Wн пaxi+1 + Wк пayi+1 + Wнрж пaxi+1 ayi+1, [с-1],
где Wо п - независимая составляющая дрейфа по оси стабилизации [с-1];
Wн п - масштаб дрейфа от небаланса, [c-1g-1];
Wк п - масштаб квадратурной составляющей, [c-1g-1];
Wнрж п - масштаб дрейфа от неравножесткости, [c-1g-2];
Ω
Вычисляют углы Qx i+1 и Qz i+1 по формулам
Qx i+1 = (-b32 i+1 + b32 i -Qy i+1 b12 i)/(b22 i+1 + b22 i)/2, [рад]
Qz i+1 = (b12 i+1 - b12 i - Qy i+1 b32 i)/(b22 i+1 + b22 i)/2, [рад]
при θi≤ θ1 и θi≥ θ2
Qz i+1 = τi+1 (Wz i+1 - Wz3 i+1 - Wдрг i+1), [рад]
Qx i+1 = (b22 i+1 -b22 i + Qz i+1 b12 i)/(b32 i+1 + b32 i)/2, [рад]
при θ2> θi> θ1
где Wz i+1 - измеренное значение угловой скорости, [с-1];
Wz3 i+1 - проекция угловой скорости Земли на измерительную ось, [c-1];
Wдрг i+1 - дрейф гироскопа по измерительной оси, определяется формулой, [с-1]
Wдрг i+1 = Wo г + Wн гazi+1 + Wкayi+1 + Wнржazi+1ayi+1,
где Wо г - независимая составляющая дрейфа [c-1];
Wн г - масштаб дрейфа от небаланса, [c-1g-1];
Wк г - масштаб квадратурной составляющей, [c-1g-1];
Wнр г - масштаб дрейфа от неравножесткости, [c-1g-2];
(операция осреднения при вычислении углов Qx i+1, Qz i+1 введена для повышения точности при импульсных воздействиях: удары о стыки, резкие рывки и т.п.).
11. Формируют матрицу ΔBi+1 в соответствии с (1).
12. Определяют остальные члены матрицы ориентации Bi+1 путем матричного произведения (2), формируя матрицу ориентации Bi+1.
13. Определяют азимут αi+1 и зенитный угол θi+1 по формулам (3), причем
14. Производят операцию контроля положения оси кинетического момента гироскопа, анализируя величину axi+1.
Если  то Wупр i+1 = 0 и по истечении такта τi+1 выдается команда "Синхронизация".
то Wупр i+1 = 0 и по истечении такта τi+1 выдается команда "Синхронизация".
Если 
(данное условие формирует необходимый гистерезис),
Wупр = Wупрmaxsign(b21 i+1, b23 i+1), [с-1],
при этом sign(b21 i+1, b23 i+1) - определяет знак, минимизируя угол поворота, и формируется код команды "Синхронизация" одновременно с кодом команды соответствующего поворота,
axmax, axmin - константы, определяются из заданного угла отклонения и равны соответственно 0,5 м/с2 и 0,1 м/с2,
Wупрmax - также константа и равна 2, [с-1].
Таким образом, введение дополнительных операций позволяет устранить основные недостатки способа прототипа, а именно ограниченную область применения и недостаточно высокую точность измерения.
Основной смысл действий по достижении этих целей заключается в управлении гироскопом таким образом, чтобы его вектор кинетического момента (с направлением которого совпадает измерительная ось акселерометра Ax) находился вблизи горизонтальной плоскости (соответственно ось датчика угловой скорости находилась в вертикальной плоскости).
Это позволяет снять ограничения с зенитных углов за счет перехода при зенитных углах θ2> θi> θ1 к другим формулам определения приращения матрицы ориентации, базирующимся на информации датчика угловой скорости, которые хорошо работают вблизи зенитного угла 90o (их особая точка соответствует θ = 0o). Такое "сшивание" двух методов, каждый из которых не работает при произвольных зенитных углах, возможно лишь в случае нахождения измерительной оси датчика угловой скорости вблизи вертикальной плоскости с отношением от 3o до 5o; кроме того, в случае произвольной ориентации, трехстепенной гироскоп обладает очень сложной математической моделью дрейфа, являющейся нелинейной функцией собственной пространственной ориентации, что практически не позволяет прогнозировать и учитывать его дрейф; напротив, в случае нахождения кинетического момента вблизи горизонтальной плоскости математическая модель дрейфа гироскопа описывается достаточно простой функцией с постоянными параметрами, как для оси гиростабилизатора, так и для оси датчика угловой скорости, что позволяет учитывать и компенсировать соответствующие дрейфы, повышая тем самым точность измерения; кроме того, повышение точности измерения достигается и за счет операций нормирования и компенсации температурных погрешностей датчиков.
Устройство работает следующим образом.
В начале прибор также с достаточной точностью закрепляют в вертикальном положении в устье скважины и включают питание, затем наземный вычислитель 1 приступает к подпрограмме "Диагностика обмена", осуществляющей анализ обмена, которая затем осуществляется на каждом такте обмена. Далее, наземный вычислитель 1 выдает команду "Передать массив констант", принимает массив констант. По истечении времени, необходимого на разгон двигателя гироскопа, наземный вычислитель 1 приступает к подпрограмме "Диагностика параметров", заключающейся в допусковом контроле параметров и приращений, кроме того, канал измерения угла и каналы акселерометров проверяются на сумму квадратов, которая затем осуществляется на каждом такте обмена.
При положительном результате наземный вычислитель выдает сообщение о готовности приступить к режиму "Начальной выставки" и по команде оператора переходит в этот режим, который осуществляется аналогичным образом и способом, как в прототипе.
По завершении режима "Начальная выставка" скважинный прибор 3 переводят в режим работы, при котором и осуществляется измерение азимута и зенитного угла вышеизложенным способом при движении его в скважине. Существенными отличиями от прототипа являются только наличие третьего акселерометра и то, что работа не требует остановок, для оценки и компенсации дрейфа, кроме того, осуществляется стабилизация оси кинетического момента гироскопа вблизи плоскости горизонта.
Поскольку в предлагаемом устройстве есть существенные отличия в соответствующих модулях и блоках, рассмотрим их более подробно.
Блок цифровой обработки 4 решает следующие задачи:
- организацию обмена скважинного прибора 3 с наземным вычислителем 1 по интерфейсу типа RS-232;
- преобразование частоты с выхода соответствующих модулей в код;
- преобразование напряжения с соответствующих датчиков температуры в код;
- хранение и выдачу констант данного скважинного прибора 3 для компенсации его погрешностей наземным вычислителем 1;
- выдачу команд управления гиростабилизатором 10.
Основу блока цифровой обработки 4 составляет однокристальная микроЭВМ 4.5 типа LN87C196NT, она имеет шестнадцатиразрядную шину данных, встроенное однократно программируемое ПЗУ, емкостью 32 кбайт, встроенное ОЗУ емкостью 512 байт, блок процессоров событий, десятиразрядный АЦП, последовательный порт, синхронный последовательный порт, периферийный сервер транзакций и восемь параллельных портов. При этом разряды Р0.4-Р0.5 порта Р0 запрограммированы на ввод и являются входами АЦП, разряды Р1.0 - Р1.5 порта Р1 запрограммированы на ввод и являются входами блока процессоров событий.
Разряды P2.5 - P2.7 порта Р2 запрограммированы на вывод и служат для выдачи команд управления гиростабилизатором 10 и синхрочастоты для преобразователей напряжение - частота, разряды P2.0, Р2.1 порта Р2 являются последовательным портом, а разряды Р6.4 - Р6.7 синхронным последовательным портом.
При включении питания происходит инициализация однокристальной микроЭВМ 4.5, т.е. начинает выполняться соответствующая программа, которая производит сброс соответствующих регистров, сброс ячеек памяти ОЗУ в ноль, программирование портов и регистров управления, маскирование прерываний АЦП и блока процессоров событий и т.п.
Команды наземной ЭВМ 1 (формат команды: первый нибл - адрес устройства, второй нибл - код команды) через приемопередатчик 4.6 разряд Р2.1 последовательного асинхронного порта поступает в сервер транзакций, который позволяет организовать обмен, разгрузив центральный процессор (при этом используются встроенные микропрограммы "Групповая посылка", "Одиночная посылка"), сервер транзакций вырабатывает прерывание и начинается его обработка, при этом происходит проверка адреса устройства, кода команды и бита четности, если адрес не совпадает, то обработка прерывания заканчивается, если адрес совпадает, но не совпадает код команды с кодом используемых команд либо команда принята с нарушениями четности, то микроЭВМ 4.5 формирует ответ (формат ответа: первый нибл - адрес устройства, второй - нибл состояния), где в нибле состояния указывает соответствующим кодом, что принята команда не моего списка, либо принята команда с нарушением четности, и заканчивает обработку прерываний, и через разряд Р2.0 и приемопередатчик 4.6 выдает его наземному вычислителю 1. В противном случае микроЭВМ 4.5 приступает к выполнению команды, переданной наземным вычислителем и так же формирует ответ, где в нибле состояния указывает на отсутствие ошибок обмена и заканчивает обработку прерывания.
Для обеспечения работы скважинного прибора необходимы следующие команды управления:
- команда "Установить исходное состояние";
- команда "Передать массив констант";
- команда "Записать массив констант";
- команда "Синхронизация";
- команда "Синхронизация с поворотом платформы влево";
- команда "Синхронизация с поворотом платформы вправо";
- команда "Обмен";
- команда "Передать последнюю команду.
Если принят код команды "Установить исходное состояние", то микроЭВМ 4.5 приступает к программе инициализации. Если принят код команды "Передать массив констант" (эта команда подается однократно в начале работы), то микроЭВМ 4.5 через соответствующие разряды синхронного порта Р6.4 - Р6.7 осуществляет чтение ППЗУ констант 4.7 и выдачи их в наземный вычислитель. Если принят код команды "Записать массив констант" с соответствующим массивом (эта команда в рабочей программе не используется, а применяется только в программе калибровки скважинного прибора 3), то микроЭВМ через разряды синхронного порта Р6.4 - Р6.7 осуществляет перезапись этого массива в ППЗУ констант 4.2. Если принят код команды "Синхронизация", то эта команда размаскирует прерывания блока процессоров событий и АЦП, перепишет содержимое внутреннего таймера и основных соответствующих ячеек ОЗУ в дополнительные ячейки ОЗУ, доступные серверу транзакций, обнулит таймер и содержимое основных ячеек ОЗУ, подключит ко входу АЦП первый канал, т.е. разряд Р0.4 порта Р0, запустит таймер и АЦП и выключит команды поворота платформы, то есть установит сигналы логического нуля на выходах разрядов P2.5, Р2.6 порта Р2.
Эта команда соответствует такту τi+1 работы наземного вычислителя 1, имеет наивысший приоритет прерывания и формирует такт работы скважинного прибора 3, при этом, поскольку прерывания блока процессоров событий и АЦП размаскированы, то появление импульсов с соответствующих преобразователей напряжение - частота на входах Р1.0 - Р1.5 порта Р1 блока процессоров событий или сигнала "Конец преобразования" АЦП вызывают соответствующий запрос на прерывание, которое в соответствии со своим приоритетом начинает обрабатываться.
Обработка прерываний блока процессоров событий заключается в инкрементировании (т.е. прибавлении единицы) содержимого основной ячейки ОЗУ, соответствующей данному запросу, и снятии данного запроса (при этом в общем случае приоритет любого запроса с блока процессоров событий не играет существенной роли, лишь бы он был обработан, поскольку главное за такт работы наземного вычислителя 1 - общее количество импульсов, а не время их появления, а поскольку минимальный период любого запроса прерывания с преобразователей напряжение - частота много больше суммарного времени обработки всех прерываний вместе взятых, то потери этого запроса, а следовательно, и потери информации с преобразователей напряжение - частота не будет, в наихудшем случае этот запрос может быть обработан в следующем такте, т.е. с той же точностью, плюс/минус один импульс, как и при любом другом способе измерения частоты), таким образом, осуществляется измерение частоты преобразователей напряжение - частота за такт работы наземного вычислителя 1.
Обработка прерывания АЦП, имеющего более низкий приоритет, заключается в записи содержимого регистра АЦП в ячейки ОЗУ, соответствующего данному каналу АЦП, переключению на следующий канал и повторный запуск АЦП, кроме того, при обработке запроса по последнему каналу (разряду Р0.7 порта 7) происходит маскирование прерывания АЦП, при этом суммарное время преобразования АЦП также много меньше такта работы наземного вычислителя 1, таким образом, в данном такте осуществляется однократное измерение напряжения с соответствующих датчиков температуры.
Внутренний таймер осуществляет измерение времени между командами "Синхронизация". Команда "Синхронизация с поворотом платформы влево-вправо" отличается от команды "Синхронизация" наличием команды управления платформой, т. е. сигнала логической единицы на соответствующих выходах разрядов Р2.5 или Р2.6 порта P2, которая выставляется после дешифрации данных команд.
Если принят код команды "Обмен", то сервер транзакций приступает к формированию и выдачи пакета данных (формат пакета следующий: первый байт - ответ, второй - старший байт, а третий - младший байт первого канала акселерометров, четвертый - старший байт, а пятый - младший байт второго канала акселерометров и т.д. до младшего байта последнего канала измерения температуры).
Если принят код команды "Передать последнюю команду", то сервер транзакций наряду с "Ответом" выдает из соответствующей ячейки байт последней принятой команды. Эта команда используется в программе анализа обмена для исключения сбоев обмена.
Таким образом, введение новых связей и элементов, а также применение более мощной однокристальной ЭВМ, позволяющей программно организовать счетчики для соответствующих каналов преобразователей напряжение - частота, позволяет существенно сократить межмодульные связи за счет исключения шестнадцатиразрядной шины данных, исключением адресной шины и существенного сокращения шины управления.
Модуль измерения угловой скорости и стабилизации 5 решает следующие задачи:
- формирование синусоидального напряжения для питания датчиков угла гироскопа;
- демодуляцию сигналов с датчиков момента гироскопа;
- формирование амплитудно-частотной характеристики соответствующих каналов;
- преобразование аналоговой информации канала измерения угловой скорости в частоту.
Основу модуля измерения угловой скорости и стабилизации 5 составляют линейные дифференциальные преобразователи 5.1, 5.2 типа АД 598 5.1, 5.2, они имеют встроенные:
- генератор синусоидального напряжения с соответствующими входами задания амплитуды и частоты (в данном модуле используется только генератор линейного дифференциального преобразователя 5.1, его сигнал подан на обмотки возбуждения датчиков угла и вход синхронизации второго дифференциального преобразователя 5.2);
- демодуляторы;
- фильтры низкой частоты с соответствующими входами задания полосы пропускания и масштабирующий усилитель с соответствующими входами задания коэффициента передачи, кроме того, имеют входы регулировки нулевого сигнала. Особенностью данных линейных дифференциальных преобразователей 5.1, 5.2 является то, что они реализуют функцию преобразования типа
Wouт = (Ua - Ub)/(Ua + Ub) • K,
где Ua, Ub - сигналы с соответствующих дифференциальных датчиков;
K - коэффициент усиления.
Это позволяет минимизировать влияние изменения амплитуды и частоты генератора синусоидального напряжения, а также влияние температуры.
Формирование амплитудно-частотной характеристики осуществляется с помощью формирователей 5.3, 5.4, которые представляют собой два последовательно соединенных фильтра-пробки, настроенных на частоту нутации и частоту вращения гироскопа и усилителей мощности 5.5. 5.6 типа АД 815.
Преобразование напряжение - частота канала измерения угловой скорости осуществляется с помощью синхронного преобразователя напряжение - частота 5.7 типа АД 652, он имеет встроенный источник опорного напряжения Uref = 5 В, диапазон Uвх = 0-10 В и осуществляет функцию преобразования типа
Fouт = (Uвх/10 В)(Fclc/2),
где Fclc - частота синхронизации, поэтому для обеспечения диапазона Uвх = ± 5В, выход его источника опорного напряжения через соответствующий резистор соединен с его же входом интегратора, в этом случае он реализует функцию преобразования, типа
Fouт = [(Uвх + Uref)/10 В) (Fclc/2).
Это позволяет, во-первых, сократить аппаратурные затраты (один преобразователь вместо двух), во-вторых, обеспечивает более высокие точностные характеристики, так как "сшить" характеристики двух преобразователей во всем диапазоне температур практически невозможно.
Таким образом, применение соответствующих преобразователей позволяет существенно повысить точностные характеристики данного модуля, существенно сократить аппаратурные затраты, что позволяет исключить применение микросборок и позволяет существенно сократить габариты данного модуля.
Модуль преобразователей угла 6 решает следующие задачи:
- формирование синусоидального напряжения для питания обмотки возбуждения СКТ;
- демодуляцию сигналов с соответствующих обмоток СКТ;
- преобразование аналоговой информации соответствующих каналов в частоту.
Основу модуля преобразователей угла 6 составляют линейные дифференциальные преобразователи 6.1, 6.2 типа АД 698, они имеют встроенные:
- генератор синусоидального напряжения с соответствующими входами задания амплитуды и частоты (в данном модуле используются только генератор преобразователя 6.1, его сигнал подан на обмотку возбуждения СКТ и соответственно входы синхронизации преобразователей 6.1, 6.2);
- демодуляторы;
- фильтры низкой частоты с соответствующими входами задания, полосы пропускания и масштабирующий усилитель с соответствующими входами задания, коэффициента передачи, кроме того, имеют входы регулировки нулевого сигнала. Особенностью данных преобразователей 6.1, 6.2 является то, что они реализуют функцию преобразования типа
Wouт = (Ua/Ub) • K,
где Ua - сигнал с соответствующей обмотки СКТ;
Ub - сигнал с генератора синусоидального напряжения;
K - коэффициент усиления.
Это позволяет минимизировать влияние параметров генератора, а также влияние температуры.
Преобразование аналоговой информации в частоту осуществляется с помощью синхронных преобразователей напряжение - частота 6.3, 6.4 типа АД 652 по способу, аналогичному вышеуказанному.
Таким образом, применение соответствующих преобразователей также позволяет существенно повысить точностные характеристики, существенно сократив габариты данного модуля.
Модуль преобразователей ускорений 7 решает следующие задачи:
- фильтрации входных сигналов;
- преобразование аналоговой информации соответствующих каналов в частоту.
Первая решается с помощью активных фильтров второго порядка 7.1, 7.2, 7.3 с полосой пропускания до 60 Гц, которые можно выполнять по любой известной схеме.
Вторая - с помощью синхронных преобразователей напряжение - частота 7.4, 7.5, 7.6 типа АД 652 вышеизложенным способом, что также позволяет повысить точностные характеристики данного модуля и сократить габариты.
Задатчик эталонного тока 8 осуществляет управление платформой, это происходит следующим образом: по сигналу лог.1 на одном из входов 8.5 или 8.6 срабатывает соответствующий канал аналогового коммутатора 8.2, подключая источник опорного напряжения 8.1 к соответствующему выходному усилителю мощности 8.3 или 8.4, на выходе которого и формируется управляющее воздействие.
Предложенный способ определения азимута и зенитного угла скважины позволяет снять ограничения с зенитных углов за счет перехода при зенитных углах θ2> θi> θ1 к другим формулам определения приращения матрицы ориентации, базирующимся на информации датчика угловой скорости, которые хорошо работают вблизи зенитного угла 90o (их особая точка соответствует θ = 0o). Такое "сшивание" двух методов, каждый из которых не работает при произвольных зенитных углах, возможно лишь в случае нахождения измерительной оси датчика угловой скорости вблизи вертикальной плоскости с отклонением от 3o до 5o и нахождение кинетического момента вблизи горизонтальной плоскости, поэтому математическая модель дрейфа гироскопа описывается достаточно простой функцией с постоянными параметрами как для оси гиростабилизатора, так и для оси датчика угловой скорости, что позволяет учитывать и компенсировать соответствующие дрейфы, повышая тем самым точность измерения, кроме того, повышение точности измерения достигается и за счет операции нормирования и компенсации температурных погрешностей датчиков гироскопического инклинометра.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗЕНИТНОГО УГЛА И АЗИМУТА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 2012 |
|
RU2507392C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1996 |
|
RU2100594C1 |
| Способ определения зенитного угла и азимута скважины и гироскопический инклинометр | 2018 |
|
RU2682087C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ И КОМПЕНСАЦИИ МАГНИТНОЙ ДЕВИАЦИИ ИНКЛИНОМЕТРА | 2000 |
|
RU2186966C2 |
| СПОСОБ ИЗМЕРЕНИЯ ТРАЕКТОРИИ СКВАЖИНЫ ПО АЗИМУТУ И ДВУХРЕЖИМНЫЙ БЕСПЛАТФОРМЕННЫЙ ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2269001C1 |
| ИНКЛИНОМЕТР | 2003 |
|
RU2250371C1 |
| ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР И СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ СКВАЖИН | 1996 |
|
RU2104490C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ СКВАЖИН ГИРОСКОПИЧЕСКИМ ИНКЛИНОМЕТРОМ | 2008 |
|
RU2387828C1 |
| СПОСОБ НАЧАЛЬНОЙ АЗИМУТАЛЬНОЙ ВЫСТАВКИ СКВАЖИННОГО ПРИБОРА ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА И АЗИМУТАЛЬНЫЙ МОДУЛЬ | 2012 |
|
RU2501946C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ РАБОЧЕГО ОРГАНА МАШИНЫ | 2014 |
|
RU2566153C1 |
Изобретение относится к точному приборостроению и может быть использовано, например, для обследования нефтяных, газовых и геофизических скважин путем движения скважинного прибора (СП) в скважине. Изобретение решает задачу повышения точности определения азимута и зенитного угла скважины, позволяет снять ограничения с зенитных углов за счет перехода при зенитных углах θ2> θi> θ1 к другим формулам определения приращения матрицы ориентации, базирующимся на информации датчика угловой скорости (ДУС), которые хорошо работают вблизи зенитного угла 90° (их особая точка соответствует θ=0). Такое совместное применение двух методов, каждый из которых не работает при произвольных зенитных углах, возможно лишь в случае нахождения измерительной оси ДУС вблизи вертикальной плоскости с отклонением от 3 до 5o и нахождения кинетического момента вблизи горизонтальной плоскости. Поэтому математическая модель дрейфа гироскопа описывается достаточно простой функцией с постоянными параметрами как для оси гиростабилизатора, так и для оси ДУС. Это позволяет учитывать и компенсировать соответствующие дрейфы, повышая тем самым точность измерения. Способ осуществляется с помощью гироскопического инклинометра, который содержит наземный вычислитель, соединенный каротажным кабелем с СП. Причем СП содержит одноосный гиростабилизатор (ГС), на платформе которого установлены два акселерометра с взаимно ортогональными осями чувствительности, ориентированными перпендикулярно оси стабилизации, и трехстепенной гироскоп. Датчики угла гироскопа соединены с входами модуля измерения угловой скорости и стабилизации, подключенного своими выходами соответственно к объединенным обмоткам возбуждения датчиков угла, к датчику момента гироскопа по перпендикулярной соответствующему датчику угла оси, к входной шине блока цифровой обработки (БЦО) и к двигателю отработки, кинематически связанному с осью стабилизации. На последней закреплен выходной датчик угла в виде синусно-косинусного трансформатора, обмотка возбуждения и выходы которого подключены к модулю преобразователей угла, соединенному с входной шиной БЦО. К шине БЦО подключены также выходы модуля преобразователей ускорений, входы которого соединены с выходами акселерометров. Входы синхронизации модулей преобразователей угла и ускорений, модуля измерения угловой скорости и стабилизации объединены и подключены к выходной шине БЦО, с которой соединен также первый вход задатчика эталонного тока. Выходы задатчика подключены к второму датчику момента гироскопа, шина ввода-вывода БЦО соединена с каротажным кабелем. На платформе одноосного ГС дополнительно установлен третий акселерометр, ось чувствительности которого совпадает с осью стабилизации. Выход третьего акселерометра подключен к соответствующему входу модуля преобразователей ускорений. Второй вход задатчика эталонного тока также соединен с выходной шиной БЦО, к дополнительной входной шине которого подключены датчики температуры акселерометров и трехстепенного гироскопа. 2 с. и 5 з.п.ф-лы, 7 ил.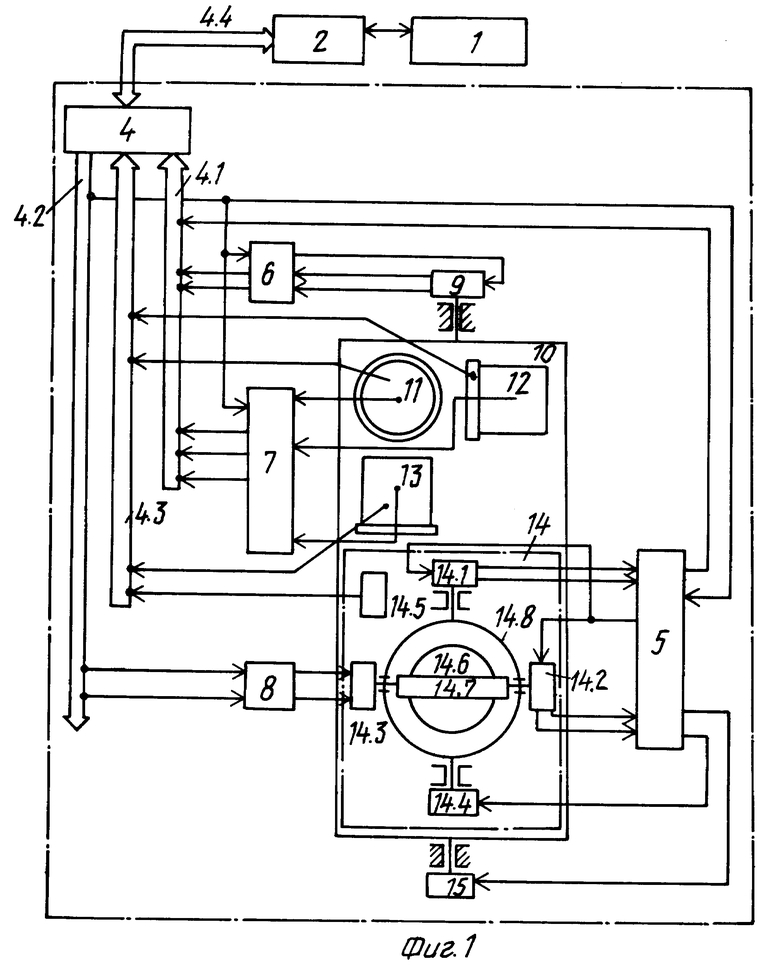
где i + 1 - текущий такт работы;
bi+1, I,  элементы матрицы ориентации Bi+1, которую формируют в виде произведения матриц Bi+1 = ΔBi+1 • Bi, где Bi, Bi+1 - матрицы ориентации на предыдущем и текущем тактах работы вычислителя,
элементы матрицы ориентации Bi+1, которую формируют в виде произведения матриц Bi+1 = ΔBi+1 • Bi, где Bi, Bi+1 - матрицы ориентации на предыдущем и текущем тактах работы вычислителя,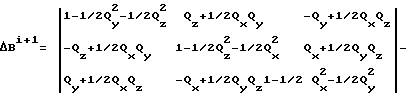 - приращение матрицы ориентации, элементы которой определяют в зависимости от углов ориентации Qx, Qy, Qz, причем начальное значение матрицы ориентации равно
- приращение матрицы ориентации, элементы которой определяют в зависимости от углов ориентации Qx, Qy, Qz, причем начальное значение матрицы ориентации равно
где α×в - азимутальный угол осей чувствительности акселерометров в момент окончания выставки,
отличающийся тем, что дополнительно измеряют ускорение силы тяжести по третьей ортогональной оси, измеряют длительность такта работы, осуществляют операцию нормирования информации гироскопа, акселерометров и датчика угла поворота, путем вычисления коэффициента нормирования по формуле n = τ/τi+1, где τ - заданная длительность такта работы, с, τi+1 - длительность данного такта работы, с, и вычисления произведений ni+1 • Nj i+1, где Nj i+1 - коды измеренных значений с гироскопа, акселерометров и датчика угла поворота, производят компенсацию температурных составляющих угловой скорости и ускорения, контролируют предыдущую величину зенитного угла θi и текущую проекцию axi+1 ускорения силы тяжести, формируют управляющее воздействие на гироскоп по стабилизированной оси так, чтобы ось его кинетического момента находилась вблизи плоскости горизонта, вводят добавки, компенсирующие дрейф одноосного гиростабилизатора, и определяют угол поворота Qу по формуле
Q
где Wупр i+1 - скорость управления гиростабилизатором, с-1;
Wдрп i+1 - прогноз величины дрейфа гиростабилизатора, с-1;
Ω
Qx i+1 = (-b32 i+1 + b32 i - Qy i+1b12 i) / (b22 i+1 + b22 i) / 2
при θi≤ θ1 или θi≥ θ2
Qz i+1 = (b12 i+1 - b12 i - Qy i+1b32 i) / (b22 i+1 + b22 i) / 2;
Qz i+1 = wi+1(Wz i+1 - Wz3 i+1 - Wдрг i+1) при θ2> θi> θ1
Qx i+1 = (b22 i+1 - b22 i + Qz i+1b12 i) / (b32 i+1 + b32 i) / 2,
где b32 i+1 = azi+1/g; b12 i+1 = axi+1 / g; b22 i+1 = ayi+1 / g при θ2> θi> θ1 или  - элементы матрицы ориентации, формируемые по результатам измерения проекций axi+1, ayi+1, azi+1 ускорения силы тяжести g, при этом θ1, θ2 - константы, sign(cosθi) - определяет знак;
- элементы матрицы ориентации, формируемые по результатам измерения проекций axi+1, ayi+1, azi+1 ускорения силы тяжести g, при этом θ1, θ2 - константы, sign(cosθi) - определяет знак;
Wz i+1 - измеренное значение угловой скорости, с-1;
Wz3 i+1 - проекция угловой скорости Земли на измерительную ось, с-1;
Wдрг i+1 - дрейф гироскопа по соответствующей оси, с-1, вычисляют значение зенитного угла по вышеуказанной формуле при θi≥ θ2 θi≤ θ1 или по формуле
2. Гироскопический инклинометр, содержащий наземный вычислитель, соединенный каротажным кабелем со скважинным прибором, содержащим блок обработки информации, включающий однокристальную ЭВМ и приемопередатчик, одноосный гиростабилизатор, на платформе которого установлены два акселерометра со взаимно ортогональными осями чувствительности, ориентированными перпендикулярно оси стабилизации гиростабилизатора, и трехстепенной гироскоп с датчиками угла и момента, двигатель отработки, кинематически связанный с осью стабилизации, на которой закреплен выходной датчик угла в виде синусно-косинусного трансформатора, задатчик эталонного тока, один из входов которого соединен с выходной шиной блока цифровой обработки, а выход подключен к одному из датчиков момента гироскопа, датчик температуры, причем шина ввода-вывода блока цифровой обработки является выходом скважинного прибора, отличающийся тем, что он снабжен модулем измерения угловой скорости и стабилизации, модулями преобразователей ускорений и угла и установленным на платформе одноосного гиростабилизатора третьим акселерометром, ось чувствительности которого совпадает с осью стабилизации, а датчик температуры установлен на гироскопе, причем выходы всех акселерометров подключены к входам модуля преобразователей ускорений, второй вход задатчика эталонного тока соединен с выходной шиной блока цифровой обработки, к дополнительной входной шине которого подключены датчик температуры и встроенные датчики температуры акселерометров, при этом датчики угла гироскопа соединены с входами модуля измерения угловой скорости и стабилизации, подключенного своими выходами соответственно к объединенным обмотками возбуждения датчиков угла, к датчику момента гироскопа по перпендикулярной соответствующему датчику угла оси, к входной шине блока цифровой обработки и к двигателю обработки, обмотка возбуждения и выходы синусно-косинусного трансформатора подключены к модулю преобразователей угла, соединенному с входной шиной блока цифровой обработки, к которой подключены также выходы модуля преобразователей ускорений, причем входы синхронизации модулей преобразователей угла и ускорения и модуля измерения угловой скорости и стабилизации объединены и подключены к выходной шине блока цифровой обработки, с которой соединен второй вход задатчика эталонного тока, выходы которого подключены к второму датчику момента гироскопа.
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1996 |
|
RU2100594C1 |
| Гироскопический инклинометр | 1988 |
|
SU1548423A1 |
| Инклинометр | 1990 |
|
SU1788224A1 |
| Измерительный блок инклинометра | 1991 |
|
SU1827541A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА СКВАЖИНЫ В ПОСЛЕДОВАТЕЛЬНЫХ ТОЧКАХ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1991 |
|
RU2030574C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ОБЪЕКТА В ТОЧКЕ ОСТАНОВА | 1993 |
|
RU2062872C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПРОЕКЦИЙ ВЕКТОРА УГЛОВОЙ СКОРОСТИ ВРАЩЕНИЯ ЗЕМЛИ ДЛЯ ОПРЕДЕЛЕНИЯ АЗИМУТА СТВОЛА СКВАЖИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1994 |
|
RU2085730C1 |
| БЕСКАРДАННЫЙ ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР И СПОСОБ ВЫРАБОТКИ ИНКЛИНОМЕТРИЧЕСКИХ УГЛОВ | 1994 |
|
RU2101487C1 |
| ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР И СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ СКВАЖИН | 1996 |
|
RU2104490C1 |
| US 4163324 A, 07.08.1979 | |||
| УСТРОЙСТВО ДЛЯ СОЕДИНЕНИЯ ГИБКИХ ТРУБ | 2013 |
|
RU2541366C1 |
| Машина для формования железобетонных тонкостенных пространственных криволинейных покрытий сводов двойной кривизны | 1957 |
|
SU109830A1 |
| ИСАЧЕНКО В.Х | |||
| Инклинометрия скважин | |||
| - М.: Недра, 1987, с.17 - 20. | |||

