Изобретение относится к машиностроению, а более конкретно к устройствам, передающим вращательное движение от ведущего вала к ведомому валу с возможностью вращения этих валов с разной частотой, зависящей от нагрузки на ведомом валу, и может быть использовано в машиностроении, транспортном машиностроении и станкостроении.
Известна инерционная муфта, содержащая соосные ведущий и ведомый валы, на которых установлены соответственно ведущий и ведомый валы, на которых установлены соответственно ведущая и ведомая полумуфты, первая из которых состоит из водила, несущего по разную сторону от оси муфты планетарные конические зубчатые колеса, ведомая полумуфта выполнена в виде центрального конического зубчатого колеса, находящегося в зацеплении с планетарными колесами, каждое из которых несет по два инерционных груза, расположенных диаметрально противоположно друг другу.
У этой инерционной муфты величина всей передаваемой мощности зависит только от интенсивности изменения момента количества движения инерционных грузов и в связи с этим требует применения массивных инерционных грузов, что вызывает при вращении значительные динамические нагрузки и характеризует относительно малую нагрузочную способность муфты в связи с большой удельной массой инерционных грузов на единицу передаваемой мощности. Передача всей мощности только за счет динамического взаимодействия инерционных грузов с полумуфтами уменьшает КПД при большой разнице в частотах вращения ведущей и ведомой полумуфт.
Известна также инерционная муфта, содержащая ведущий, ведомый и промежуточный валы, кинематически связанные соответственно с ведущим и промежуточным валами посредством инерционных грузов, ведущую и ведомую полумуфты, и дифференциал, водило которого установлено на ведомом валу, а одно из центральных колес - на полом промежуточном валу (авт. св. N 1803632, кл. F 16 D 43/18, 1991).
У этой инерционной муфты около половины величины мощности передается за счет взаимодействия инерционных грузов с полумуфтами, что приводит к значительным динамическим нагрузкам, снижает нагрузочную способность, уменьшает КПД.
Целью изобретения является повышение КПД и нагрузочной способности, уменьшение динамических нагрузок и улучшение за счет этого эксплуатационных характеристик.
Это достигается тем, что в автоматическом вариаторе, содержащем ведущий, ведомый и промежуточный полый валы, кинематически связанные соответственно с ведущим и промежуточным валами посредством инерционных грузов, ведущую и ведомую полумуфты и дифференциал, водило которого установлено на ведомом валу, а одно из центральных колес - на полом промежуточном валу, применяется дополнительный вал, который является входным валом вариатора, и второй дифференциал, водило которого установлено на дополнительном валу, одно из центральных колес - на ведущем валу, выполненном полым, а второе - на промежуточном валу, дополнительный, ведущий и промежуточный валы установлены коаксиально, а второе центральное колесо первого дифференциала установлено на дополнительном валу.
На фиг. 1 приведен автоматический вариатор, общий вид; на фиг. 2 - вторая проекция ведущей и ведомой полумуфт.
Автоматический вариатор содержит полый ведущий 1, ведомый 2 и полый промежуточный 3 валы, кинематически связанные соответственно с ведущим и промежуточным валами посредством инерционных грузов 4 ведущую 5 и ведомую 6 полумуфты, дифференциал, водило 7 которого установлено на ведомом валу 2, а одно из центральных колес 8 - на полом промежуточном валу 3.
Ведущая и ведомая полумуфты могут иметь разное устройство, обеспечивающее коаксиальную установку полого ведущего 1 и полого промежуточного 3 валов, с выходом последнего по разную сторону в осевом направлении от этих полумуфт. В данном конкретном случае ведущая полумуфта содержит установленное на полом ведущем валу 1 водило 5 в виде радиальных стержней, на концах которых как на осях с возможностью свободного вращения размещены по разную сторону от оси полумуфты и вариатора планетарные конические зубчатые колеса 9, каждое из которых несет по два инерционных груза 4, закрепленных на этих планетарных колесах диаметрально противоположно друг другу.
Ведомая полумуфта выполнена в виде установленного на полом промежуточном валу 3 ведомого центрального конического зубчатого колеса, находящегося в зацеплении с планетарными колесами 9. Входным валом вариатора является дополнительный вал 10, на котором установлено водило 11 второго дифференциала, одно из центральных колес 12 которого установлено на полом ведущем валу 1, а другое 13 - на полом промежуточном валу 3. Дополнительный 10, ведущий 1 и промежуточный 3 валы установлены коаксиально. Второе центральное колесо 14 первого дифференциала установлено на дополнительном валу 10.
Автоматический вариатор работает следующим образом.
При вращении дополнительного вала 10, являющегося входным валом вариатора, и неподвижном ведомом вале 2, являющимся выходным валом вариатора, в связи с приложенной к нему нагрузкой или началом работы водило 7 первого дифференциала неподвижно, а второе центральное колесо 14 вращается вместе с дополнительным валом 10. При этом первое центральное колесо 8 первого дифференциала, промежуточный вал 3, ведомое центральное колесо 6 ведомой полумуфты и второе центральное колесо 13 второго дифференциала вращаются с одинаковой частотой с дополнительным валом 10, но в противоположную сторону. Водило 11 второго дифференциала вращается вместе с дополнительным валом 10.
Следовательно, водило 11 и второе центральное колесо 13 второго дифференциала в данном случае вращаются с одинаковой частотой, но в противоположных направлениях. Исходя из свойств дифференциала, при этом первое центральное колесо 12, ведущий вал 1 и ведущая полумуфта в составе водила 5 будут вращаться с утроенной частотой по сравнению с частотой вращения дополнительного вала в одном с ним направлении. Частота вращения водила 5 ведущей полумуфты относительно ведомого центрального колеса 6 ведомой полумуфты будет в четыре раза превышать частоту вращения дополнительного вала 10. Это обеспечивает передачу полумуфтами максимального по величине вращающего момента. Приложенные к центральным колесам дифференциала вращающие моменты будут всегда равны. Исходя из этого величина моментов на каждом из центральных колес 8 и 14 первого дифференциала будет равна половине величины момента на дополнительном валу 10 и одинакова с вращающим моментом на водиле 11 второго дифференциала (здесь и далее величины моментов указываются без учета потерь на трение).
В свою очередь, величина момента на каждом из центральных колес 12 и 13 второго дифференциала будет равна половине момента на его водиле 11 или четверти величины вращающего момента, передаваемого дополнительным валом 10. Следовательно, при любом режиме работы полумуфты будут передавать вращающий момент, величина которого равна четверти величины вращающего момента, передаваемого дополнительным валом 10.
На водиле 7 первого дифференциала и ведомом валу 2 величина момента будет равна сумме величин моментов на его центральных колесах 8 и 14 или равна моменту на дополнительном валу 10, являющимся входным валом вариатора.
Приняв величину вращающего момента, передаваемого дополнительным валом, за единицу можно показать, что на дополнительном валу 10, водиле 7 первого дифференциала и выходном валу 2 вращающий момент будет равен единице. На водиле 11 второго дифференциала, первом 8 и втором 14 центральных колесах первого дифференциала и промежуточном валу 3 величина момента равна 0,5, т. е. составляет сумму величин моментов на ведомом центральном колесе 6 ведомой полумуфты и втором центральном колесе 13 второго дифференциала.
На центральных колесах 12 и 13 второго дифференциала, ведущем валу 1 и ведомом центральном колесе 6 ведомой полумуфты вращающий момент будет равен 0,25, т. е. полумуфты будут передавать только четвертую часть величины вращающего момента, воздействующего на дополнительный вал 10. При условии применения двух водил 5 и соответственно двух планетарных колес 9 к каждому из них будет приложен момент, равный 0,125. При этом каждый из инерционных грузов 4 будет обеспечивать передачу вращающего момента, величина которого не будет превышать 1/16 от величины момента, передаваемого дополнительным валом 10, что позволяет соответственно уменьшить массу инерционных грузов.
При большем числе водил 5 ведущей полумуфты эти показатели дополнительно уменьшаются. Этим достигается одна из целей изобретения по уменьшению динамических нагрузок, поскольку с уменьшением массы грузов 4 на них при вращении соответственно будут действовать меньшие по величине центробежные силы. Одновременно достигается еще один положительный эффект - уменьшение установленной мощности полумуфт.
Динамические нагрузки у ведущей полумуфты уменьшаются также за счет применения двух инерционных грузов на каждом планетарном колесе, что позволяет обеспечить их балансировку относительно этого колеса. В свою очередь расположение двух сбалансированных планетарных колес по разную сторону от оси полумуфт и на равном расстоянии от нее обеспечивает полную балансировку всех вращающихся элементов вариатора относительно его оси.
Известно, что передача вращающего момента и мощности с использованием зубчатых колес производится с высокими показателями КПД. В то же время, при равенстве абсолютных величин вращающего момента на ведущей и ведомой полумуфтах, они передают мощность при КПД, величина которого находится в обратной зависимости от частоты вращения ведущей полумуфты относительно ведомой полумуфты.
В предложенном автоматическом вариаторе 3/4 величины вращающего момента передается через зубчатые колеса, минуя полумфты. С учетом частоты вращения каждого из валов и величины передаваемого им момента, по нему передается соответствующая часть общей мощности, в том числе значительная ее часть, минуя полумуфты, что обеспечивает повышение КПД.
Величина вращающего момента, передаваемого через полумуфты, зависит от относительной частоты вращения ведущей полумуфты и ведомой полумуфты. При заторможенном ведомом вале 2 или при малой частоте его вращения полумуфты вращаются относительно друг другу с повышенной частотой, в том числе превышающей частоту вращения дополнительного вала. Это обеспечивает повышение нагрузочной способности полумуфт и вариатора в целом.
При вращении ведомого вала 2 под воздействием передаваемого на него вращающего момента происходит уменьшение частоты вращения полумуфт относительно друг друга с соответствующим уменьшением величины передаваемого вариатором вращающего момента. При этом частота вращения ведомого вала 2 находится в обратной зависимости от нагрузки на нем и эти изменения происходят бесступенчато, т.е. обеспечивается плавное изменение передаточного отношения.
Из сказанного следует, что регулирующим звеном в вариаторе является ведущая и ведомая полумуфты, которые передают вращающий момент за счет изменения момента количества движения инерционных грузов 4, что достигается путем их принудительного вращения одновременно вокруг оси вариатора и на осях своих водил 5 вместе с планетарными колесами 9. Согласно закону сохранения момент количества движения может быть изменен только под действием внешних сил. При этом его увеличение требует затрат энергии, а поэтому может произойти только при взаимодействии с дополнительным (входным) валом 10 и за счет передаваемой по нему мощности. Уменьшение момента количества движения происходит за счет силового противодействия со стороны ведомого (выходного) вала 2. Этим обеспечивается передача вращающего момента и мощности в одном направлении от ведущей полумуфты к ведомой полумуфте, а следовательно, от дополнительного вала 10 к ведомому валу 2 вариатора. При вращении инерционных грузов момент количества движения изменяется за счет циклического изменения расстояния инерционных грузов в пределах от минимального R1 (см. фиг. 1) до максимального R2 (см. фиг. 2), и наоборот. Это обуславливает работоспособность автоматического вариатора.
Помимо указанных причин изменение момента количества движения происходит также в связи с вращением планетарных колес 9 и закрепленных на них инерционных грузов 4 одновременно вокруг двух осей - оси вариатора и оси водила 5, которые перпендикулярны относительно друг друга. При этом планетарные колеса и грузы совершают совместное вращательное движение относительно точки пересечения этих осей. Известно, что момент количества движения тела относительно точки является векторной величиной и проявляется с соблюдением фундаментального физического закона сохранения, согласно которому момент количества движения может быть изменен только под действием внешних сил. Вектор момента количества движения направлен вдоль оси вращения тел. В связи с этим при повороте водила с вращающимся на нем планетарным колесом вокруг оси на 180о направление вектора момента количества движения относительно точки пересечения осей вариатора и водила изменится на противоположное, что равнозначно изменению его величины в два раза. Проявление закона сохранения обусловит при этом передачу соответствующего по величине вращающего момента на ведомую полумуфту, которая обеспечивает принудительное вращение планетарных колес вокруг осей водила. Равнозначным этому объяснению является действие гироскопических сил, препятствующих повороту вращающихся планетарных колес 9 с грузами вокруг оси вариатора, что согласно третьему закону классической механики (равенство и противоположная направленность действия и противодействия) и создает реактивный момент, передаваемый на ведомое центральное колесо ведомой полумуфты.
Приведенные в качестве примера полумуфты передают вращающий момент также и при отсутствии инерционных грузов 4 только за счет изменения момента количества движения вращающихся планетарных колес 9, которые с целью повышения нагрузочной способности выполняются массивными. Это уменьшает размер механики и упрощает его устройство.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКИЙ ВАРИАТОР Б.Ф.КОЧЕТКОВА | 1993 |
|
RU2047026C1 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 1997 |
|
RU2109188C1 |
| АВТОМАТИЧЕСКАЯ ПЕРЕДАЧА Б.Ф.КОЧЕТКОВА | 1992 |
|
RU2044201C1 |
| Автоматическая передача Б.Ф.Кочеткова | 1990 |
|
SU1803663A1 |
| АВТОМАТИЧЕСКАЯ ПЕРЕДАЧА Б.Ф.КОЧЕТКОВА | 1992 |
|
RU2029185C1 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2171928C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 1999 |
|
RU2163317C2 |
| Автоматическая передача Кочеткова Б.Ф. | 1991 |
|
SU1825926A1 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2171929C2 |
| РЕВЕРСИВНЫЙ ИНЕРЦИОННЫЙ АВТОМАТИЧЕСКИЙ ВАРИАТОР | 1993 |
|
RU2068133C1 |
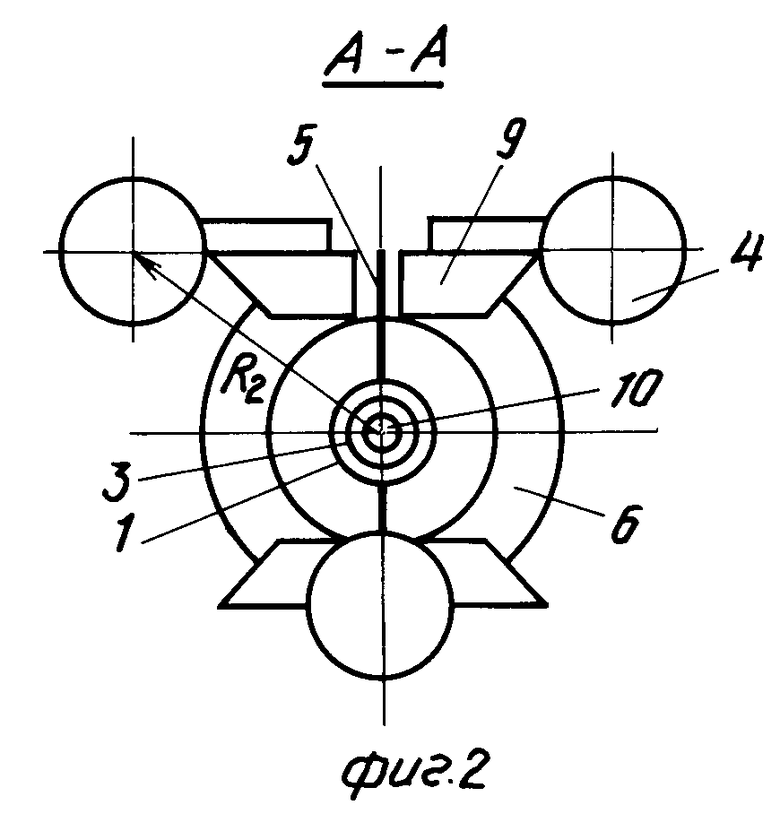
Использование: в машиностроении. Цель:повышение нагрузочной способности и КПД, уменьшение динамических нагрузок при одновременном автоматическом изменении частоты вращения ведомого вала в обратной зависимости от нагрузки. Сущность изобретения: вариатор содержит полый ведущий 1, ведомый 2 и полый промежуточный 3 валы, а также дополнительный (входной) 10 валы и два дифференциала (Д). Установленное на ведущем валу водило 5 ведущей полумуфты в виде радиальных осей при помощи конических планетарных колес 9 с инерционными грузами 4 связано с ведомой полумуфтой в виде конического ведомого центрального колеса 6, установленного на промежуточном валу. Водило 7 первого Д установлено на ведомом валу 2, первое центральное колесо (К) 8 - на промежуточном валу 3 и второе К 14 - на дополнительном валу 10. Водило 11 второго Д установлено на дополнительном валу, первое К 12 - на ведущем валу 1 и второе К 13 - на промежуточном валу. Дополнительный, ведущий и промежуточный валы установлены коаксиально. Вращающий момент передается за счет изменения момента количества движения грузов 4 и планетарных колес 9 при их одновременном вращении вокруг оси вариатора и перпендикулярных этой оси осей водила 5. При этом 3/4 величины вращающего момента от дополнительного (входного) вала 10 на ведомый вал 2 передается по дополнительному и промежуточному валам, минуя полумуфты. 2 ил.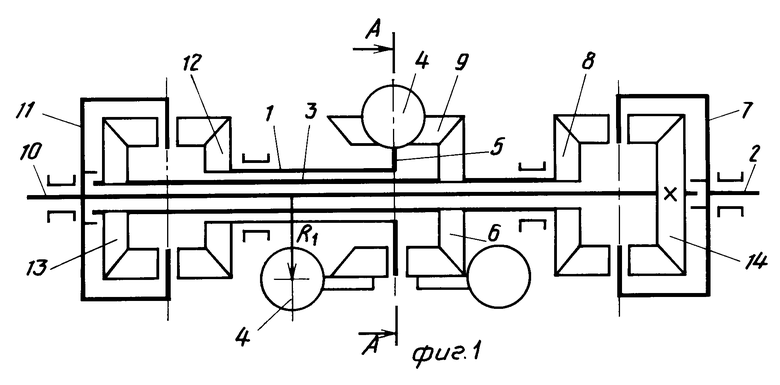
АВТОМАТИЧЕСКИЙ ВАРИАТОР, содержащий ведущий, ведомый и промежуточный полый валы, кинематически связанные соответственно с ведущим и промежуточным валами посредством инерционных грузов ведущую и ведомую полумуфты и дифференциал, водило которого установлено на ведомом валу, а одно из центральных колес - на полом промежуточном валу, отличающийся тем, что он снабжен дополнительным входным валом и вторым дифференциалом, водило которого установлено на дополнительном валу, одно из центральных колес - на ведущем валу, выполненном полым, а второе - на промежуточном валу, дополнительный, ведущий и промежуточный валы установлены коаксиально, а второе центральное колесо первого дифференциала установлено на дополнительном валу.
| Инерционная муфта Б.Ф.Кочеткова | 1988 |
|
SU1555565A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
