Изобретение относится к шахтным и рудничным подъемным установкам и может быть использовано в автоматизированных системах управления подъемниками для автоматической остановки подъемной машины при зависании любого сосуда в стволе шахты и появлении по этой причине напуска тяговых канатов.
Известен способ защиты от напуска тягового каната шахтной подъемной установки [авт.св. СССР N 538968, кл. В 66 В 5/06, 1975], в соответствии с которым сравнивают скорость сматывания каната с барабана подъемной машины и скорость перемещения клети, определяемую путем сравнения частоты электромагнитных волн, возбуждаемых в канате, и частоты волн, отраженных от подъемного сосуда.
Однако электромагнитные волны, возбуждаемые в канате токами промышленной частоты, распространяются в нем на незначительное расстояние (1-1,1 м), следовательно нужна повышенная частота возбуждающего генератора. К тому же, отраженный от подъемного сосуда сигнал может иметь большие флуктуации, так как место крепления сосуда к канату в виде коуша может иметь самую различную плоскость контакта "канат - прицепное устройство-сосуд", что не повышает безопасность способа.
Известен также способ защиты от напуска тяговых канатов [авт.св. N 865763, СССР В 66 В 5/12], в котором используются электромагнитные волны (прямые и отраженные), идущие вдоль тягового каната.
Однако на пути электромагнитных волн в стволе шахты могут встретиться препятствия в виде, например транспортных коммуникаций отдельных горизонтов, затрудняющих их прохождение, что снижает безопасность способа. Кроме того, как показали исследования, проведенные в стволе глубиной 750 м шахты N 6 Приаргунского Горно-химического Комбината, даже радиоволна затухает на 500-метровой отметке сырого бетонированного ствола. Следовательно, для известного способа необходимы почти идеальные условия, которые ни один шахтный ствол обеспечить не может.
В качестве прототипа принят "Способ защиты от напуска тягового каната шахтной подъемной установки и аварийной остановки направляющей рамки подъемного сосуда" [авт.св. СССР N 1588674, кл. В 66 В 5/06, 1987], включающий определение скорости сматывания каната с барабана подъемной машины, возбуждение в канате в зоне подъемного сосуда акустической волны заданной частоты, прием этой волны в зоне направляющих шкивов, сравнение частоты ее колебаний с частотой опорного генератора, определение по разности этих частот скорости перемещения подъемного сосуда, фиксирование напуска тягового каната и выдачу команды на включение предохранительного тормоза.
Однако напуск каната по известному способу определяется косвенным методом - сравнением скоростей, что снижает точность и безопасность работы подъемной установки. Кроме того, способ приемлем только для одноконцевого шахтного подъема, а для использования его в стандартном двухконцевом подъеме требуется двойной комплект соответствующего оборудования, что сужает область его применения.
Цель изобретения - повышение точности, безопасности и расширение области применения.
Поставленная цель достигается тем, что в соответствии с предлагаемым способом защиты шахтной подъемной установки от напуска тяговых канатов, осуществляемым сравнением контрольных сигналов длины тягового каната, смотанного с барабана подъемной машины, и пройденного порожним подъемным сосудом пути в стволе шахты, с выдачей, при их несоответствии один другому, команды на включение предохранительного тормоза, интегрируют величину скорости перемещения порожнего сосуда и по полученной величине определяют пройденный порожним сосудом путь, задают длину одного витка каната на барабане, интегрируют величину скорости вращения барабана, по полученной величине определяют число оборотов барабана и умножением его на заданную длину одного витка каната на барабане определяют длину тягового каната порожнего сосуда, смотанного с барабана подъемной машины, сравнивают ее с величиной пройденного порожним сосудом пути и по сигналу рассогласования судят о напуске тяговых канатов.
Сущность предлагаемого способа заключается в следующем. Если источник акустических колебаний с частотой ν перемещается относительно неподвижного приемника сигналов со скоростью ±U, то частота f принимаемых сигналов изменяется в зависимости от скорости и направления перемещения источника колебаний относительно неподвижного приемника (эффект Доплера), причем при приближении источника колебаний к приемнику частота колебаний в приемнике увеличивается на так называемую доплеровскую частоту (+Fd), а при удалении - уменьшается на (-Fd) [Геворкян Р.Г. Курс общей физики. М. Высшая школа, 1970, с. 113]. Следовательно, выделив сигнал с доплеровской частотой (±Fd), пропорциональной скорости подъемного сосуда, достаточно его проинтегрировать по времени, чтобы получить длину пути, пройденную подъемным сосудом в стволе шахты.
Для измерения длины каната, смотанного с барабана подъемной машины, достаточно проинтегрировать по времени частоту его вращения и умножить на постоянную величину для каждой подъемной машины - длины одного витка каната на барабане.
Сравнение этих параметров - пути, пройденного порожним сосудом в стволе шахты, и длины каната, смотанного с барабана подъемной машины, - позволяет однозначно и наиболее точно дать ответ: завис подъемный сосуд в стволе или нет. Иными словами - есть напуск каната или его нет.
Известно устройство защиты шахтной подъемной установки от напуска каната при зависании сосуда в стволе [авт.св. СССР N 1076391, кл. В 66 В 5/12, 1982] , содержащее датчик скорости подъемного сосуда и орган навивки каната, приемник и передатчик со своими антеннами, демодулятор, узел суммирования, нелинейный элемент с зоной нечувствительности, усилитель, высокочастотный трансформатор, фильтр низкой частоты и блок защиты. Однако использование электромагнитных волн для передачи информации по стволу шахты, как уже отмечалось, не повышает надежность устройства. К тому же, большое число электронных элементов автоматики "утяжеляет" схемное решение, что приводит к снижению надежности, а следовательно, и безопасности работы подъемной установки в целом.
За прототип принято устройство, реализующее способ защиты от напуска тягового каната [авт.св. СССР N 1588674, кл. В 66 В 5/06, 1987], содержащее датчик скорости барабана подъемной машины, размещенные на подъемном сосуде передатчик акустических колебаний заданной частоты и соединенный с ним излучатель, связанный с помощью тягового каната с размещенным в зоне направляющего шкива приемником, блок обработки информации, включающий опорный генератор, подключенный к одному из входов смесителя, вход которого является первым входом блока обработки информации, и элемент сравнения, выход которого является выходом блока обработки информации.
Цель изобретения - повышение точности, безопасности и расширение области применения.
Эта цель достигается тем, что устройство дополнительно снабжено соединенными последовательно вторым передатчиком акустических колебаний заданной частоты, вторым излучателем и вторым приемником, коммутатором с неподвижными контактами и подвижным якорем, задатчиком длины одного витка каната на барабане и последовательно соединенными интегратором, датчиком числа оборотов барабана и умножителем, а блок обработки информации снабжен последовательно соединенными дискриминатором и интегратором, выход которого подключен к первому входу блока сравнения, второй вход которого является вторым входом блока обработки информации, а к входу дискриминатора подключен выход смесителя, при этом выходы первого и второго приемников подключены к неподвижным контактам коммутатора, подвижный контакт которого соединен с первым входом блока обработки информации, второй вход которого соединен с выходом умножителя, к второму входу которого подключен выход задатчика длины одного витка каната на барабане.
Сущность предлагаемого устройства защиты заключается в следующем. Как известно, в двухконцевом, наиболее распространенном шахтном подъеме необходимо контролировать напуск только одного каната, на котором закреплен порожний сосуд. В следующем цикле работы подъема сосуды поменяются названиями. Следовательно, для расширения области применения устройства, достаточно перед блоком обработки информации разместить коммутатор, который бы подключал к известному устройству только тот канат, который может получить напуск, т.е. канат с порожним сосудом.
Контроль длины смотанного с барабана каната осуществляется следующим образом. В случае применения, например тахогенератора в качестве датчика угловой скорости барабана, напряжение на его выходе пропорционально угловой скорости, в соответствии с ф-лой (1). [Теория автоматического управления , ч. I. Под ред. А.В. Нетушила. М.: Высшая школа, 1968, с. 71, ф-ла (3.23)].
Uт.г.= a  , (1) где Uт.г. - напряжение тахогенератора;
, (1) где Uт.г. - напряжение тахогенератора;
а - коэффициент передачи; - угловая скорость барабана подъемной машины.
- угловая скорость барабана подъемной машины.
Проинтегрировав по времени выражение (1), получим:
ϕ = 
 Clт.г.dt, (2) где ϕ - угол поворота барабана.
Clт.г.dt, (2) где ϕ - угол поворота барабана.
Введя блок  , получим число оборотов барабана - n, а задав длину одного витка каната на барабане - lo и умножив на число оборотов (витков) n, получим:
, получим число оборотов барабана - n, а задав длину одного витка каната на барабане - lo и умножив на число оборотов (витков) n, получим:
lб= n × lo=  × lo, (3) где lб - длина каната, смотанного с барабана;
× lo, (3) где lб - длина каната, смотанного с барабана;
n - число оборотов барабана;
lo - длина одного витка каната на барабане.
Следовательно, достаточно сравнить путь, пройденный порожним сосудом (S3 или S2) с длиной смотанного с барабана каната, чтобы судить о напуске каната, а при его появлении дать команду на включение аварийного торможения подъемной машины.
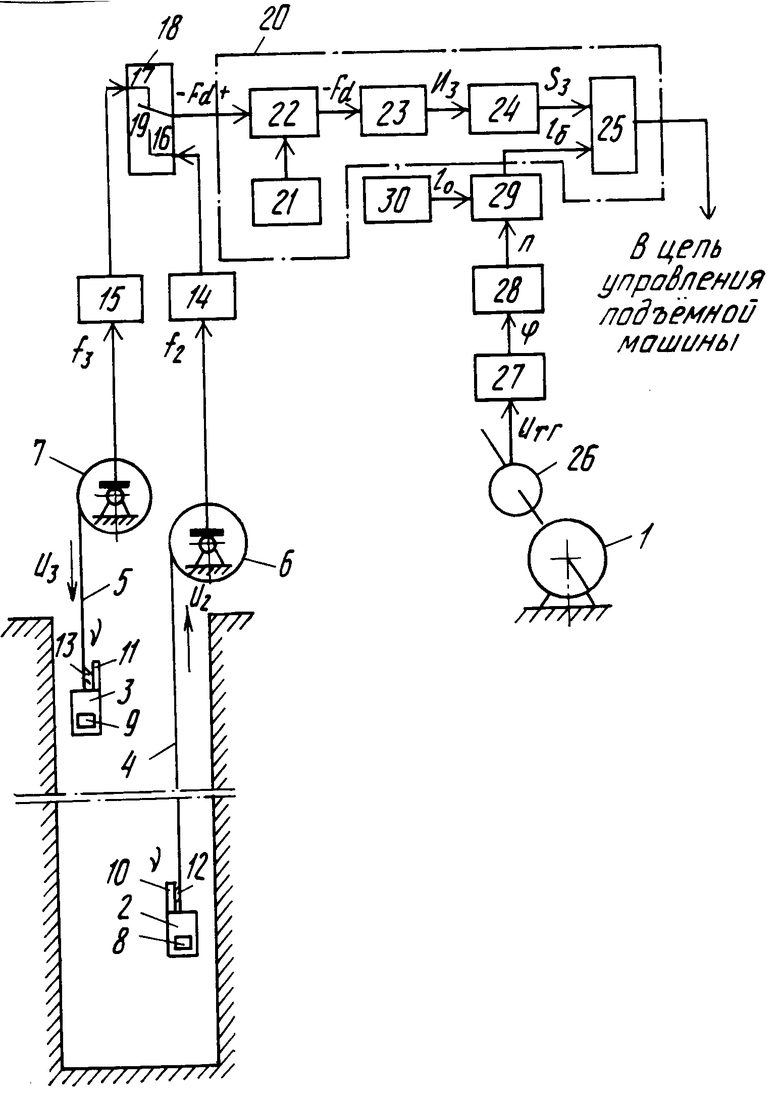
На чертеже представлена функциональная схема устройства для защиты шахтной подъемной установки от напуска тяговых канатов для реализации предлагаемого способа защиты.
Устройство содержит привод 1 шахтной подъемной установки, подъемные сосуды 2, 3, тяговые канаты 4, 5, направляющие шкивы 6, 7, передатчики 8, 9, размещенные в подъемных сосудах по одному, электрически соединенные с излучателями 10, 11 акустических колебаний, соединенные звукопроводами 12, 13, размещенными на тяговых канатах 4, 5 ближе к месту крепления канатов к сосудам, с канатами и имеющие с ними прочный контакт. С помощью металлических тяговых канатов 4, 5 излучатели 10, 11 взаимодействуют с направляющими шкивами 6, 7, которые акустически связаны с приемниками 14, 15 акустических колебаний. Их выводы электрически соединены соответственно с неподвижными контактами 16, 17 коммутатора 18, якорь которого 19 переключается одновременно с реверсом привода подъемной машины на спуск порожнего сосуда и служит входом блока 20 обработки информации, который содержит соединенные между собой опорный генератор 21, смеситель колебаний 22, отделяющий доплеровскую частоту (-Fd), к входам которого подключен якорь 19 коммутатора 18 и опорного генератора 21. Выход смесителя 22 соединен с входом частотного дискриминатора 23, преобразующего сигналы доплеровской частоты (-Fd) в соответствующие напряжения U2 или U3, в зависимости от того, какой сосуд 2 или 3 опускается в ствол шахты. Выход блока 23 соединен с помощью первого интегратора 24, преобразующего напряжения U2 или U3 в пройденные сосудами пути S2 или S3, с вторым входом блока сравнения 25. Контроль угловой скорости барабана подъемной машины осуществляется датчиком скорости 26 (например, тахогенератором), который с помощью второго интегратора 27 соединен через датчик числа оборотов 28 барабана с первым входом умножителя 29, на второй вход которого подключен задатчик 30 длины одного витка каната на барабане. Выход умножителя 29 служит первым входом блока сравнения 25.
Устройство работает следующим образом. Электрические колебания заданной частоты ν поступают с передатчика 9 на излучатель 11 акустических колебаний, который с помощью звукопровода 13 и благодаря акустической связи его с канатом 5 возбуждает в последнем акустические колебания, которые распространяются по канату 5 к направляющему шкиву 7. При этом частота акустических колебаний f в зоне направляющих шкивов получает при перемещении сосуда 3 (в направлении стрелки на чертеже) приращение (-Fd).
На оси направляющего шкива 7 размещен приемник 15 акустических колебаний, который преобразует их в электрические сигналы с частотой f=ν -Fd и с помощью электрической связи передает их на неподвижный контакт 17 коммутатора 18, переключенный в это положение одновременно с реверсом привода подъемной машины на спуск сосуд. Якорь 19 коммутатора служит входом блока 20 обработки информации. При следующем цикле подъема, когда сосуд 2 будет опускаться в ствол шахты, коммутатор 18 соединит свой якорь 19 с неподвижным контактом 16, в результате чего на вход блока 20 обработки информации начнут поступать сигналы с передатчика 8 подъемного сосуда 2, работа блоков которого аналогична. Таким образом, якорь 19 периодически подключает к блоку 20 тот тяговый канат, который закреплен за порожним в данный момент сосудом и подвержен зависанию. В смесителе колебаний 22 с помощью опорного генератора 21 отделяется сигнал, пропоpциональный только доплеровской частоте (-Fd), который, пройдя через частотный дискриминатор 23, преобразуется в напряжение U3, пропорциональное доплеровской частоте. Проинтегрировав его в первом интеграторе 24, на его выходе появляется сигнал, пропорциональный пути, пройденному порожним сосудом S3 или S2, который подается на второй вход блока сравнения 25.
Сигнал угловой скорости барабана снимается датчиком скорости 26, который с помощью второго интегратора 27, датчика числа оборотов барабана 28 и умножителя 29 с задатчиком 30 длины одного витка каната, преобразуется в величину, пропорциональную длине каната (lб), смотанного с барабана, и подается на первый вход блока сравнения 25. Если сигнал lбна первом входе блока сравнения 25 не равен сигналу на втором его входе (S3 или S2), что соответствует напуску каната, то на его выходе появляется сигнал, который служит командой на включение аварийной остановки подъемной машины.
Таким образом, сравнение длины каната, смотанного с барабана, и пути, пройденного порожним сосудом, повышает точность работы устройства, а применение коммутатора, переключающего синхронно блок обработки информации только на канат порожнего сосуда, упрощает схему устройства и расширяют область применения устройства, повышают безопасность работы шахтной подъемной установки.
Изобретение относится к шахтным и рудничным подъемным установкам. Сущность изобретения: способ основан на сравнении контрольных сигналов, длины тягового каната, смотанного с барабана подъемной машины, и пройденного порожним сосудом пути в стволе шахты. При несоответствии их один другому выдают команду на включение предохранительного тормоза. Измерение длины каната, смотанного с барабана, производится интегрированием по времени угловой скорости барабана. Измерение пройденного порожним сосудом пути в стволе шахты осуществляется возбуждением в тяговом канате порожнего сосуда акустической волны заданной частоты, приемом ее в зоне направляющих шкивов, выделением в смесителе колебаний сигнала доплеровской частоты и его интегрированием. Сравнение длины смотанного с барабана каната и пройденного порожним сосудом пути в стволе шахты производится в блоке сравнения, и по разности их судят о напуске каната. Устройство для реализации способа дополнительно содержит коммутатор, включенный между приемниками и блоком обработки информации, датчик угловой скорости барабана, блок умножения и задатчик длины одного витка каната на барабане. 2 с.п. ф-лы, 1 ил.
СПОСОБ ЗАЩИТЫ ШАХТНОЙ ПОДЪЕМНОЙ УСТАНОВКИ ОТ НАПУСКА ТЯГОВЫХ КАНАТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ.
| Способ защиты от напуска тягового каната шахтной подъемной установки и аварийной остановки направляющей рамки подъемного сосуда | 1987 |
|
SU1588674A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
