Изобретение относится к сельскохозяйственной технике, а более конкретно к машинам для посадки горшечной рассады, выращенной в пластмассовых кассетах.
Применение кассет для выращивания рассады создает предпосылки для полной механизации процесса посадки рассады и тем самым позволяет освободить овощеводов от утомительного и монотонного ручного труда, применяемого в известных рассадопосадочных машинах на операции подачи рассады в захваты посадочного аппарата, а также позволяет повысить производительность и качество посадки рассады.
Наиболее близкой по технической сущности и достигаемому результату является рассадопосадочная машина, предназначенная для посадки рассады, выращенной во взаимостыкуемых прямоугольных гибких ячеистых кассетах. Машина состоит из стеллажного устройства для кассет с рассадой, платформы для оператора, приемного наклонного транспортера с продольными направляющими, выполненными по дуге окружности в зоне выталкивания рассады из ячеек кассеты, механизма подачи кассет возвратно-поступательного действия, механизма выстраивания вытолкнутых из кассет групп рассады в равномерный поток и подачи ее в вертикальном положении в сошник, посадочный аппарат в виде толкателя, размещенного внутри сошника, опорно-приводных колес и цепных приводов. Оператору, работающему на данной машине, не приходится собирать и складировать пустые кассеты они накапливаются в бункере, а также данная конструкция приспособлена и для посадки рассады с разветвленной кроной, например капусты белокочанной и томатов.
Однако в этой конструкции машины имеются недостатки, не позволяющие использовать не взаимостыкуемые кассеты с гексагональной (шахматной) схемой расположения ячеек, так как в механизме выталкивания рассады все пуансоны жестко закреплены на одной рамке, а в механизмах привода пуансонов и подачи кассет нет компенсатора нестыкуемости кассет. Кроме того, в технологическом процессе работы машины сохраняются операции подачи кассет со стеллажей на приемный транспортер с соблюдением плотной стыковки кассет, выполняемые вручную. Эти операции строго циклические, монотонные и поэтому не исключены ошибки от утомляемости оператора.
Целью изобретения является повышение производительности и расширение эксплуатационных возможностей за счет использования кассет различного типа.
Указанная цель достигается тем, что автоматическая рассадопосадочная машина, содержащая установленные на раме стеллажное устройство для гибких ячеистых кассет, транспортер кассет с криволинейным участком для их изгиба, устройство выталкивания рассады из ячеек, выполненное в виде пуансонов, устройство подачи рассады к месту посадки и механизмы приводов, согласно изобретению снабжено установленным на раме механизмом подъема и опускания полок стеллажного устройства, имеющим концевые выключатели, механизмом компенсации нестыкуемости кассет, установленным на ведущем валу привода транспортера кассет и выполненным в виде двухстороннего храповика, а также индивидуальными приводами пуансонов, причем полки стеллажного устройства соединены с механизмом подъема и опускания полок посредством гибкой связи и в них выполнены продольные пазы, расположенные соосно с транспортером кассет, на котором с шагом, равным длине кассеты, закреплены фиксаторы, входящие в зону стыковки кассет нижней полки, причем те фиксаторы, расстояние между которыми равно суммарной длине кассет на полке, установлены со смещением относительно остальных и в зоне расположения концевых выключателей механизма подъема и опускания полок стеллажного устройства, который посредством привода транспортера кассет связан с устройством подачи рассады, выполненным в виде двух желобчатых транспортеров, между которыми установлена маятниковая заслонка.
Дополнительно в двухстороннем храповике один из храповиков имеет число зубьев, кратное числу рядов ячеек в кассетах, а другой число зубьев, кратное числу кассет на полке; привод устройства выталкивания рассады выполнен в виде кулачкового вала, кинематически связанного с приводом машины, причем кулачки на валу установлены с возможностью регулирования положения относительно друг друга и ячеек кассеты; механизм подъема и опускания полок стеллажного устройства выполнен в виде мальтийского механизма, в корпусе кривошипа которого установлена защелка с возможностью постоянного прижатия пружиной к ведущему колесу, а концевые выключатели выполнены в виде двух взаимно подпружиненных рычагов, один из которых имеет выступ для зацепления со смещенным толкателем транспортера кассет и служит ограничителем поворота другому, который имеет профильную дорожку для выведения защелки из защепления с зубчатым колесом; маятниковая заслонка выполнена в виде шарнирно подвешенной пластины, консольный конец которой подпружинен.
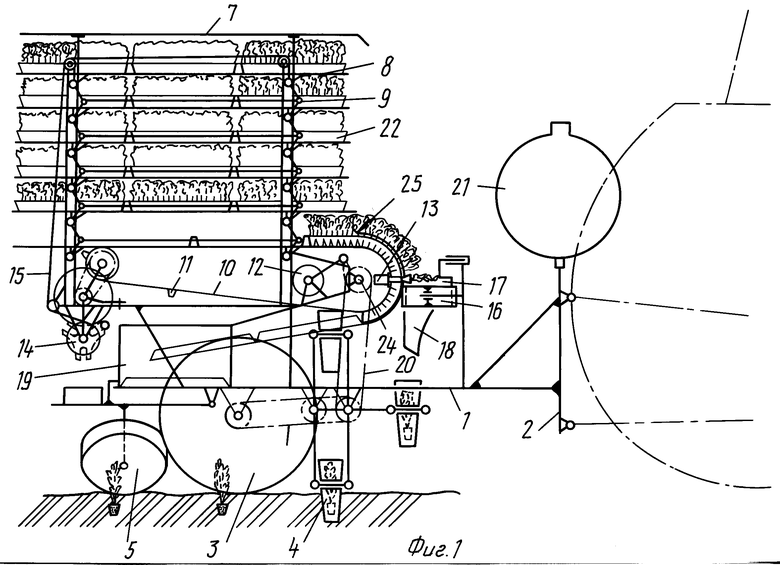
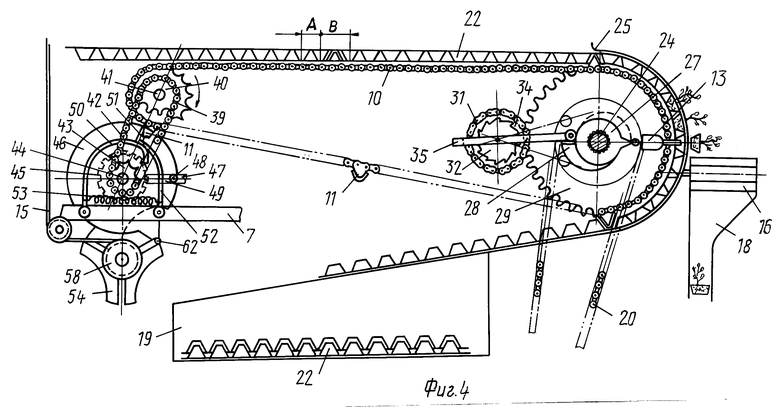
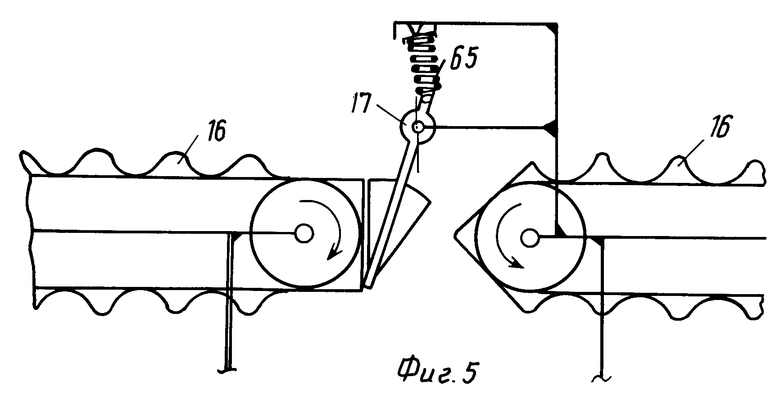
На фиг. 1 показана схема автоматической рассадопосадочной машины в агрегате с колесным трактором, вид сбоку; на фиг. 2 то же, вид спереди; на фиг. 3 кинематическая схема машины, вид сверху; на фиг. 4 схема механизма подъема и опускания полок стеллажного устройства; на фиг. 5 схема желобчатых транспортеров, между которыми установлена маятниковая заслонка, вид спереди.
Автоматическая рассадопосадочная машина содержит раму 1 с трехточечным присоединительным устройством 2, опирающимся на два пневматических колеса 3. На раме 1 установлены посадочный аппарат 4 лункокопающего типа, прикатывающие катки 5, цепной привод 6, стеллажное устройство 7 для кассет с полками 8, соединенными между собой кинематически, например, плоскопараллелограммным механизмом 9 для сохранения взаимной параллельности, транспортер 10 кассет с фиксаторами 11, механизм 12 привода транспортера кассет, механизм толкателей 13, механизм 14 подъема и опускания полок стеллажного устройства с гибкими связями 15, желобчатые транспортеры 16, между которыми установлена маятниковая заслонка 17, рассадопровод 18, бункер 19 для пустых кассет, цепной привод 20 и емкость 21 для воды.
Стеллажное устройство 7 состоит из трех частей: правого, левого и среднего стеллажей. Средний стеллаж является резервным. Размещенные на нем кассеты с рассадой переставляются вручную на правый и левый стеллажи в том случае, если на последних кассет не осталось, а до конца поля необходимо пройти еще не более половины пройденного расстояния.
Подвижные полки 8 стеллажного устройства имеют продольные пазы 23, ширина и длина которых обеспечивают опускание полок 8 ниже плоскости несущей ветки транспортера 10 кассет.
В зоне выталкивания рассады из ячеек кассет 22, т.е. на криволинейном участке транспортера 10 кассет, последние изгибаются по радиусу относительно осей кулачковых валов 24 при помощи изогнутых по радиусу пластин 25.
Кулачковые валы 24 включают приводную звездочку 26, кулачки 27 привода толкателей 13, кулачки 28 привода транспортера 10 кассет, главную звездочку 29 транспортера 10 кассет и шестерню 30 привода желобчатых транспортеров 16. Звездочка 29 посажена на вал свободно и получает вращение от цевочного колеса 31, жестко связанного на одном валу с зубчатыми дисками 32 и 33.
Зубчатый диск 32 поворачивается на заданный угол собачкой 34 и кулисой 35 и обеспечивает перемещение транспортера 10 кассет на расстояние A, равное расстоянию между рядами ячеек в кассете 22.
Зубчатый диск 33 имеет один лишь зуб, взаимодействующий с собачкой 36 в тот момент, когда необходимо передвинуть транспортер кассет на расстояние В, равное расстоянию между рядами ячеек в зоне стыка кассет.
Желобчатые транспортеры 16 приводятся в движение от шестерни 30 посредством шестерни 37 конической зубчатой пары 38.
Кулачки 27 на валу 24 устанавливают с разворотом относительно друг друга на 180о, если применяются кассеты 22 с гексагональной схемой расположения ячеек, или устанавливают в одном положении, если ячейки в кассете расположены по квадратной схеме.
Механизм 14 подъема и опускания полок стеллажного устройства приводится в движение от звездочек 39 и 40, жестко соединенных с валом 41, а также цепной передачей 42 и звездочкой 43, установленной на валу 44, на котором установлены зубчатое колесо 45 и ведущее звено 46 механизма, например, кривошип мальтийского механизма. В корпусе кривошипа установлена защелка 47 с роликом 48. Защелка подпружинена и постоянно стремится войти в зацепление с зубчатым колесом 45, но ролик 48 удерживает защелку 47 благодаря упору 49 механизма автовыключения привода, состоящего из шарнирно установленных на раме 1 концевого выключателя 50, выполненного в виде рычага с упором 51, и концевого выключателя 52, выполненного в виде рычага с упором 49, стягиваемых пружиной 53. Ведомое звено 54, например трехпозиционный крест мальтийского механизма, установлено на валу 55 свободно и соединяется с валом муфтой 56. На концах вала 55 установлены шкивы 57 и 58, к которым прикреплены концы гибких связей 15, удерживающих подвижные полки 8 стеллажного устройства 7.
Подвижные полки 8 среднего резервного стеллажа приводятся в движение автономным приводом 59, например червячным редуктором с ручкой, или гидроприводом, установленным на валу 60, на концах которого жестко закреплены шкивы 61 с штифтовыми замами 62. К шкивам 61 прикреплены концы гибких связей 63 и 64, удерживающих полки 8 среднего стеллажа. Штифтовыми замками 62 сблокировывают шкивы 57 и 61, при этом обязательно отключают муфту 56 сцепления, когда необходимо поднимать все полки 8 стеллажного устройства 7 при их загрузке кассетами 22 с рассадой.
Работает автоматическая рассадопосадочная машина следующим образом.
Сначала необходимо произвести настройку механизмов машины в соответствии с заданным расстоянием между растениями в ряду, а также типом применяемых гибких кассет по схеме расположения ячеек и по взаимостыкуемости. Так, например, для посадки рассады из прямоугольных гибких кассет с гексагональной схемой расположения ячеек, с нестыкуемостью смежных кассет (т.е. B, A), с заданным шагом посадки, необходимо: на кулачковых валах 24 развернуть кулачки 27 на 180о друг относительно друга; установить собачку 35 механизма 10 привода транспортера кассет в рабочее положение; установить соответствующую заданному шагу посадки сменную звездочку 26.
Машина навесная и транспортируется в поле в поднятом положении навесной системы трактора.
На краю поля машина опускается до опоры ее на пневматические колеса 3.
Загрузка стеллажного устройства 7 кассетами 22 с рассадой осуществляется в следующем порядке: соединяют замком 62 шкивы 57 и 61 и отключают муфту 56; вращением ручки червячного редуктора или включением гидропривода 58 поднимают первые полки стеллажного устройства 7 на уровень выше горизонтальной ветви транспортера 10 кассет; устанавливают на полки кассеты 22 с рассадой; поднимают на тот же уровень следующие полки стеллажного устройства 7 и устанавливают на них кассеты с рассадой, и т.д. до заполнения всех полок стеллажного устройства 7 кассетами 22 с рассадой; включают муфту 56 и размыкают шкивы 57 и 61, выдвигая штифтовой замок 62; поднимая машину гидросистемой трактора в транспортное положение, вращением колеса 3 подводят первый ряд ячеек кассеты к толкателям 13; заезжают в борозду и опускают машину в рабочее положение, после чего можно начинать равномерное прямолинейное движение по полю, а процесс рассады машина осуществляет в автоматическом режиме.
Процесс посадки рассады машиной в автоматическом режиме состоит в следующем: пневматические колеса 3 посредством цепных передач приводят во вращение валы посадочного аппарата 4 и кулачковые валы 24, при этом сначала кулачки 28 поворачивают кулису 35 и через собачку 34, зубчатый диск 32, цевочное колесо 31, звездочку 29, передвигают цепь транспортера 10 кассет и фиксатор 11 на расстояние A. Кассета 22 передвигается фиксатором 11 на расстояние A, равное расстоянию между рядами ячеек в кассете; затем при неподвижной кассете кулачки 27 нажимают на толкатели 13 и они выталкивают из кассеты 22 группу растений на желобчатые транспортеры 16, циклы работы левых и правых кулачковых валов 24 смещены по фазе на 180о; желобчатые транспортеры 16 вращаются равномерно и синхронно с роторным лункокопающим аппаратом 4 и поочередно сбрасывают по одному растению в конусовидный рассадопровод 18, при этом очередность поштучной подачи рассады транспортерами 16 обеспечивается заслонкой 17, которая отклоняется влево или вправо под начальным воздействием выступов транспортера 16, а затем и пружины 65 и тем самым поочередно освобождает путь свободному падению растений в рассадопровод 18; в конусовидном рассадопроводе 18 рассада под воздействием более тяжелой корневой части, а также благодаря взаимодействию стеблевой части рассады с сужающейся книзу поверхностью рассадопровода 18 разворачивается в вертикальное, корнем вниз, положение; из рассадопровода 18 рассада свободным падением падает в конусовидный ковш лункокопающего аппарата; при вхождении конусовидного ковша в почву, его створки плотно прижаты друг к другу и они надежно охраняют находящуюся внутри него рассаду от повреждения, а при выходе ковша из почвы его створки раздвигаются и рассада остается в лунке, затем ее заделывают почвой прикатывающие катки 5; после выталкивания рассады из последнего ряда ячеек в кассете 22 собачка 36 входит к зацепление с зубчатым диском 33 и транспортер кассет 10 продвигает кассеты на расстояние В в пределе того же цикла посадки одного растения; после выталкивания рассады из последнего ряда ячеек последней кассеты на полке стеллажного устройства 7 фиксатор 11 транспортера 10 кассет входит в зацепление с упором концевого выключателя 50, а пружина 53 отжимает концевой выключатель 52 с упором 49 и освобождает защелку 47, которая входит в зацепление с зубчатым колесом 45, благодаря чему однороликовый кривошип 46 поворачивает крестовину 53 на 120о, а со шкивов 57 и 58 сматывается гибкая связь на длину, равную расстоянию между полками 8 стеллажного устройства 7, в результате чего полки 8 опускаются и кассеты с рассадой на нижней полке входят в зацепление с фиксаторами 11 транспортера 10 кассет и процесс циклической подачи кассет продолжается беспрерывно.
Процесс посадки рассады в автоматическом режиме продолжается до тех пор, пока имеются кассеты 22 на стеллажном устройстве 7. Если кассеты на этом устройстве на исходе, а до конца поля необходимо пройти расстояние не более половины уже пройденного пути, то тракторист останавливает агрегат и пополняет стеллажное устройство 7 кассетами из резервного стеллажа, используя индивидуальный привод 59 в соответствии с описанной последовательностью операции.
Достигая конца поля, тракторист поднимает гидронавеской машину в транспортное положение, делает разворот и заезд в новый проход и опускает машину в рабочее положение. Вынимает из бункера 19 пустые кассеты и загружает стеллажное устройство кассетами с рассадой описанным способом. Если от предыдущего прохода машины осталась кассета с невысаженной рассадой на транспортере кассет в зоне криволинейного участка, то ее не вынимают, а кассеты с рассадой на нижней полке размещают встык с оставшейся кассетой и процесс посадки рассады продолжается в автоматическом режиме.
Применение изобретения позволяет осуществлять посадку рассады с большой производительностью и минимальными затратами труда; применять различные типы гибких ячеистых кассет как по схеме расположения ячеек, так и по стыкуемости смежных кассет.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТ ДЛЯ ПОДАЧИ РАССАДЫ К ПОСАДОЧНОМУ АППАРАТУ | 2022 |
|
RU2800822C1 |
| РАССАДОПОСАДОЧНАЯ МАШИНА | 2006 |
|
RU2326523C1 |
| Рассадопосадочная машина | 1981 |
|
SU973057A1 |
| РАССАДОПОСАДОЧНАЯ МАШИНА | 1972 |
|
SU350415A1 |
| Кассета для выращивания и пересадки рассады | 1975 |
|
SU895312A1 |
| КАССЕТА ДЛЯ ВЫРАЩИВАНИЯ И ПЕРЕСАДКИ РАССАДЫ | 1973 |
|
SU393982A1 |
| РАССАДОПОСАДОЧНАЯ МАШИНА | 1996 |
|
RU2102852C1 |
| РОТОРНЫЙ СТЕЛЛАЖ | 2006 |
|
RU2330400C1 |
| СПОСОБ ВЫРАЩИВАНИЯ РАСТЕНИЙ В УСЛОВИЯХ ЗАЩИЩЕННОГО ГРУНТА, УСТРОЙСТВО ДЛЯ ВЫРАЩИВАНИЯ РАСТЕНИЙ В УСЛОВИЯХ ЗАЩИЩЕННОГО ГРУНТА И СБОРНО-РАЗБОРНЫЙ МНОГОЯРУСНЫЙ СТЕЛЛАЖ ДЛЯ ВЫРАЩИВАНИЯ РАСТЕНИЙ В УСЛОВИЯХ ЗАЩИЩЕННОГО ГРУНТА | 2006 |
|
RU2391812C2 |
| УСТРОЙСТВО ДЛЯ УКЛАДКИ РАССАДЫ В НАКОПИТЕЛЬ | 1998 |
|
RU2164734C2 |


Изобретение используется для посадки горшечной рассады, выращенной в пластмассовых кассетах. Машина содержит стеллажное устройство с полками для кассет, транспортер с криволинейным участком, с внутренней стороны которого расположено выталкивающее устройство в виде пуансонов, а с наружной стороны - желобчатый транспортер, при этом она снабжена механизмом нестыкуемости кассет и механизмом вертикального перемещения полок стеллажного устройства. 4 з.п. ф-лы, 5 ил.
| Патент США N 4156395, кл | |||
| Говорящий кинематограф | 1920 |
|
SU111A1 |
