Изобретение относится к измерительной технике и технологии судостроения и может быть использовано, например, для центровки главных двигателей и элементов валопровода судов.
Известно устройство центровки главного двигателя судна по теоретической оси валопровода, содержащее излучатель, жестко связанный с валом двигателя и оптически связанный с двумя фотомишенями, геометрические центры которых совпадают с теоретической осью валопровода [1] Одна фотомишень этого известного устройства установлена на корме, а вторая между двигателем и первой фотомишенью.
Эти фотомишени могут быть выполнены с крестообразным расположением радиальных фотоприемников, с вращающимся радиальным фотоприемником или же с вращающимся нуль-индикатором. При любом варианте выполнения фотомишени обеспечивают определение координат устройств окружностей, описываемых пучком лазера при вращении вала двигателя, относительно геометрических центров фотомишеней. Тем самым определяется пространственное положение оси главного двигателя относительно теоретической оси валопровода. Затем корректируется положение главного двигателя, снова поворачивается вал вместе с излучателем, определяется новое положение оси главного двигателя и т.д. до полного совпадения оси главного двигателя с теоретической осью валопровода. Центрирование продольной оси подшипников линии вала относительно оси вращения двигателя производится аналогичным образом.
Преимущества этого устройства:
отсутствие необходимости совмещения ОДН излучателя с осью вращения вала двигателя;
точность центровки не зависит от дрейфа ОДН излучателя, поскольку опорное направление для центрирования задается не лучом лазера, а воображаемой осью, совпадающей с осью вала двигателя;
возможность центрирования длинных валов и их подшипников по нескольким фотомишеням, т.е. за один оборот вала можно корректировать положение нескольких промежуточных подшипников.
Однако известное устройство обладает низкой точностью центровки. Это обусловлено тем, что координаты центра описанной пучком излучения окружности в плоскостях фотомишени определяются по четырем точкам. Не учитываются возможные "биения" (люфт) подшипника выходного вала двигателя, которые существенно влияют на точность определения координат центра известным способом. Производительность труда при проведении центровочных работ на таком устройстве невысока, что связано со значительной продолжительностью во времени и высокой трудоемкостью проведения технологических операций. При большой длине линии вала регистрирующие устройства должны быть значительно удалены от фотомишеней, что с учетом аналоговых фотоприемников приведет к снижению помехозащищенности и точности измерений.
Известно устройство центровки судовых механизмов, содержащее излучатель, оптически связанный через коллиматор с анализаторами проходных датчиков, установленных вдоль оптической оси излучателя [2] Анализаторы проходных датчиков оптически связаны с соответствующими формирователями начала отсчета и механически с двигателями. Количество проходных датчиков равно числу контролируемых точек объекта.
Анализатор используемого проходного датчика представляет собой прозрачный диск радиуса R + ΔR, на одной из сторон которого расположены спиралевидный и прямолинейный фотоприемники. Две стороны прямолинейного фотоприемника расположены по радиусам R с углом разворота ϕo. Две стороны спиралевидного фотоприемника образованы левосторонними спиралями Архимеда с началом в центре диска и развернутыми по радиусу R на угол 2π ϕ. Третьими сторонами обоих фотоприемников являются дуги окружностей радиуса R. Анализатор имеет непрозрачную зону в виде кольца, ограниченного окружностями радиуса R и R + ΔR. Непрозрачная зона имеет прозрачное окно для формирователя начала отсчета в виде узкой щели, расположенной на биссектрисе радиального сектора, ограничивающего радиальный фотоприемник. На другой стороне диска анализатора концентрически расположены три кольцевые шины для съема информации с прямолинейного и спиралевидного фотоприемников при помощи трех токосъемников. Выход первого токосъемника соединен с общей точкой устройства, а выходы второго и третьего подключаются к соответствующему измерительному преобразователю.
Известное устройство позволяет осуществлять одновременный контроль координат заданных точек осевой линии объекта и измерять непараллельность на базе между любыми двумя контролируемыми точками без применения дополнительных устройств (полупрозрачных пластин, пентапризм и т.п.) для расщепления опорного луча, которые увеличивают трудоемкость контроля и снижают его точность. К достоинствам известного устройства следует отнести также высокую точность измерения координат центра опорного луча относительно центра анализатора проходного датчика (до 0,1 мм) при значительном подавлении случайной составляющей погрешности измерения из-за турбулентности воздушного тракта между излучателем и проходными датчиками. Кроме того, для этого устройства характерна возможность получения большого диапазона измерения координат (до 150 м) без снижения точности. Диапазон измерения ограничен только размерами анализатора.
Недостаток известного устройства ограниченные функциональные возможности, не позволяющие использовать его без существенной доработки для центровки судовых механизмов. Это объясняется значительной сложностью и жесткой логикой работы его блока обработки, предназначенного для контроля непараллельности на заданной базе.
Существенными недостатками обладает конструкция используемых проходных датчиков.
Во-первых, нетехнологичностью изготовления и высокой стоимостью анализатора проходного датчика, поскольку процесс напыления фотоприемников специальной формы на стеклянный диск достаточно трудоемок и требует специальной оснастки, вакуумного оборудования, расхода драгметаллов.
Во-вторых, используемый метод считывания информации с вращающегося анализатора при помощи контактных токосъемников приводит к дополнительным электромагнитным помехам (из-за дребезга щеток токосъемников), механическому износу трущихся частей, снижению ресурса работы и надежности проходного датчика координат.
В-третьих, известный проходной датчик невозможно использовать в реальных условиях центровки судовых механизмов на стапеле, характеризующихся повышенным уровнем загазованности, запыленности. Пыль будет оседать на анализаторе, снижая его прозрачность и ухудшая качество фотоприемников, а также ухудшая электрический контакт токосъемников с шинами анализатора, что приведет к быстрому выходу его из строя. Хрупкость анализатора (поскольку основа его стекло) делает его также потенциально ненадежным.
В-четвертых, известный проходной датчик не является проходным на 100% поскольку опорный луч, преломляясь на каждом последующем анализаторе, смещается и интенсивность в нем убывает. Это вызывает дополнительные погрешности измерения координат. Возникают паразитные переотражения между соседними анализаторами, что может привести к сбоям в работе устройства.
Цель изобретения повышение точности и снижение трудоемкости центровки.
Поставленная цель достигается тем, что устройство для центровки судовых механизмов по теоретической оси валопровода, содержащее излучатель, коллиматор, установленный по ходу излучения, проходные датчики, анализаторы которых оптически связаны с излучателем и механически с двигателями. Каждый анализатор проходного датчика имеет непрозрачную зону в виде кольца, внутри которого расположены два непрозрачных сектора, один из которых прямолинейный, стороны которого расположены по внутренним радиусам кольца, а другой спиралевидный, стороны которого образованы спиралями Архимеда с началом в центре кольца и развернутыми по радиусу кольца на угол 2π. Обе спирали получены сдвигом относительно полярной оси, проходящей по биссектрисе прямолинейного сектора на одинаковый угол, превышающий угол сдвига каждой из сторон прямолинейного сектора относительно полярной оси. В непрозрачной зоне кольца в районе прямолинейного сектора выполнено прозрачное окно для формирователя начала отсчета. Устройство снабжено блоком обработки, генератором, блоками согласования, усилителями, демодуляторами, фильтрами и модулятором, установленным на пути излучения между излучателем и коллиматором и электрически связанным с генератором, а также распределенными фотоприемниками, установленными перед анализаторами проходных датчиков и оптически связанными с ними. Каждый распределенный фотоприемник через соответствующий блок согласования, усилитель, демодулятор и фильтр связан с блоком обработки, к которому подключен формирователь начала отсчета. Непрозрачная зона анализатора в виде кольца и непрозрачные секторы внутри этой зоны образуют жесткую конструкцию пластинчатой формы.
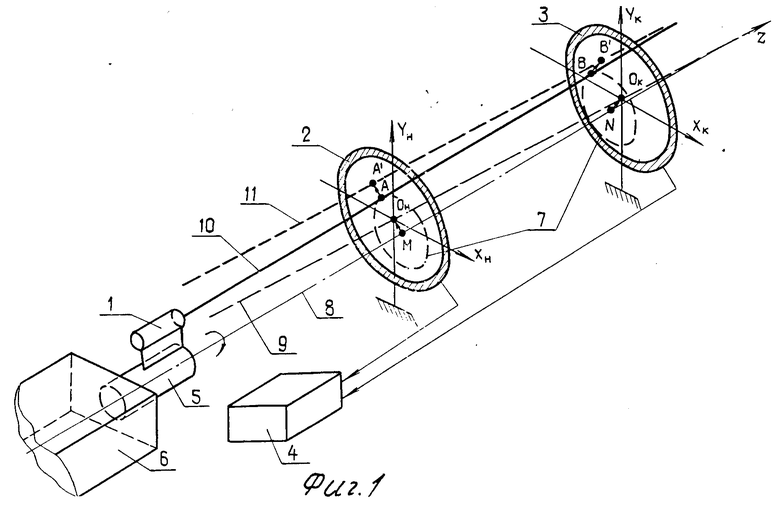
На фиг. 1 представлено условное изображение устройства центровки судовых механизмов, поясняющее принцип его работы; на фиг. 2 структурная схема устройства; на фиг. 3 анализатор проходного датчика; на фиг. 4 временные диаграммы информационных сигналов, поступающих на вход блока обработки; на фиг. 5 и 6 блок-схема алгоритма измерения координат; на фиг. 7 функциональная схема блока обработки.
Излучатель 1, проходные датчики 2 и 3, связанные с блоком 4 обработки, закреплены на объекте центровки с помощью специальной оснастки. Так, излучатель 1 закрепляется на валу 5 двигателя 6 с помощью, например, кронштейна, причем ось пучка излучателя 1 не совпадает с осью вращения вала 5 двигателя 6. С помощью центратора проходные датчики 2 и 3 устанавливают по теоретической оси валопровода в кормовом и носовом сечениях таким образом, чтобы их геометрические центры совпадали с теоретической осью. Блок 4 обработки размещается в удобном месте в непосредственной близкости от регулируемых опор двигателя 6.
При повороте вала двигателя 6 на один оборот, пучок излучателя 1 описывает в плоскостях установки проходных датчиков 2 и 3 траектории 7, близкие к окружностям. Ось вращения вала двигателя пересекает плоскости установки проходных датчиков в центрах этих траекторий (точки М и N). Проходные датчики 2, 3 и блок 4 обработки обеспечивают измерение координат нескольких точек (три и более), соответствующих фиксированным положениям пучка излучателя 1 на траекториях 7. Блок обработки 4 с помощью специальных алгоритмов позволяет определить координаты центров М и N окружностей, проходящих через измеренные точки. При выборе конкретного алгоритма учитываются параметры центрируемых устройств (габариты, длина линии вала и т.д.). С помощью этих алгоритмов учитываются "биения" (люфт) оси вала двигателя в подшипнике. Количество измеряемых точек на траекториях 7 не ограничено и определяется конкретными условиями и требуемой точностью центровки. Координаты точек М и N полностью определяют взаимное положение оси 8 вала двигателя и оси 9 валопровода, проходящей через геометрические центры проходных датчиков 2 и 3. Затем в блоке обработки запоминаются координаты текущего положения пучка 10 излучателя 1 в плоскостях проходных датчиков 2 и 3 (точки А и В, соответственно) и определяются координаты конечных точек А' и В', лежащих на прямой 11 в плоскостях проходных датчиков 2 и 3, через которые должен проходить пучок 10 излучателя 1 при совпадении оси 8 вращения двигателя с теоретической осью 9 валопровода (т.е. совпадения точек М с Он и N с Ок).
В состав устройства может быть введен проходной датчик 12, оптически связанный с излучателем 1 и электрически с блоком 4 обработки. Этот датчик 12 может быть использован для центровки промежуточных опор линий валопровода.
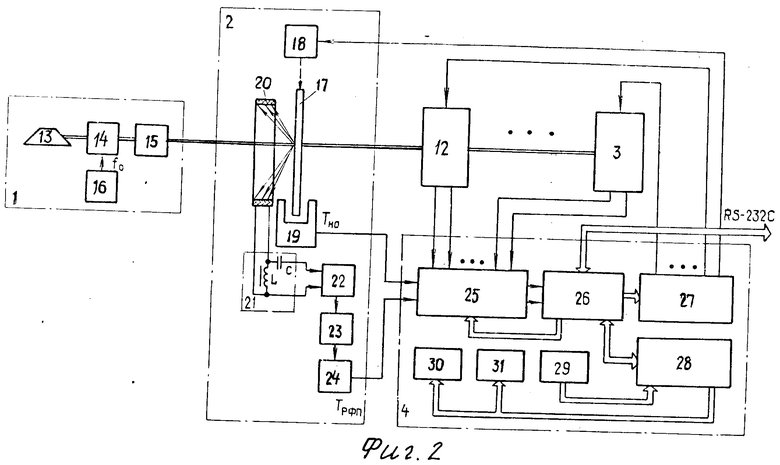
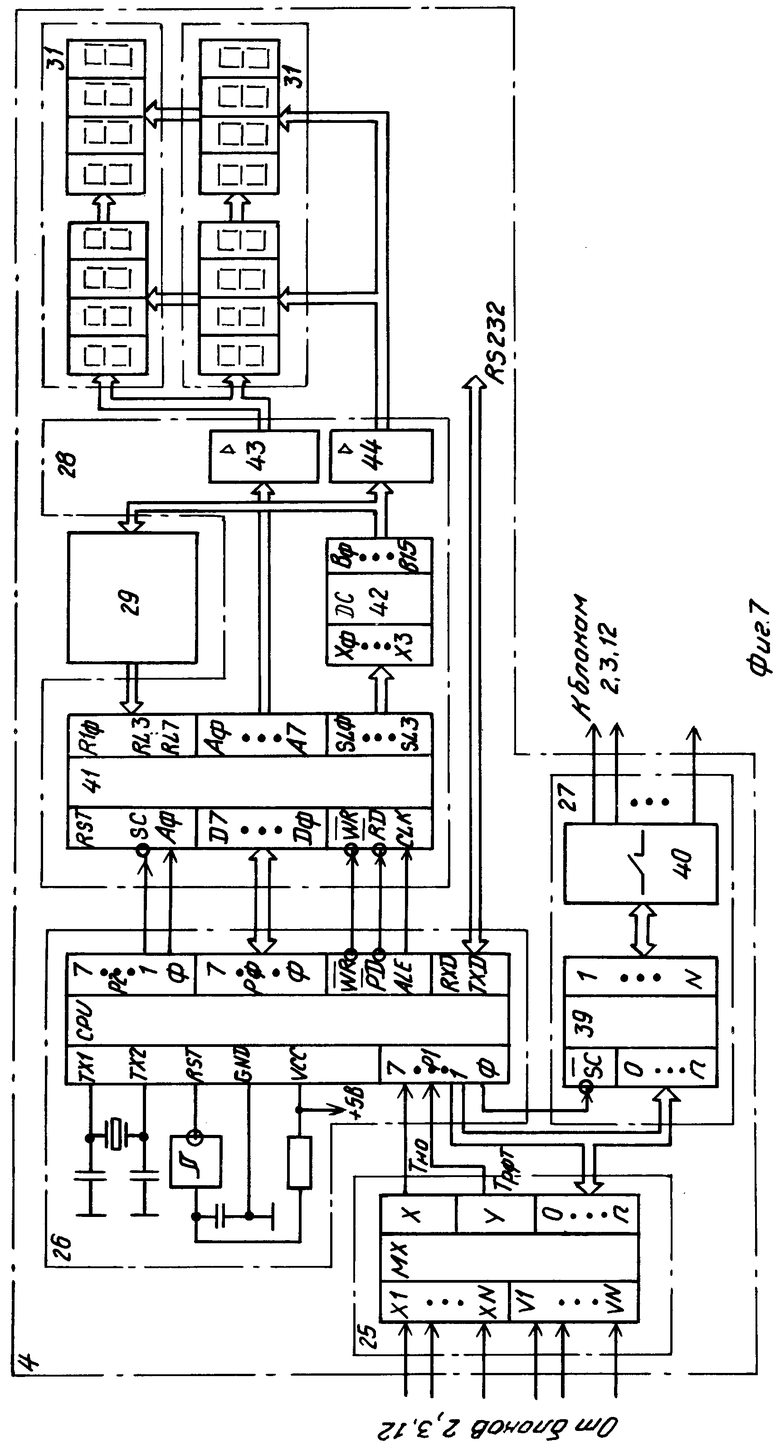
Излучатель 1 состоит из лазера 13, световой пучок которого через модулятор 14 и коллиматор 15 попадает на проходные датчики 2, 3, 12. Генератор 16 связан с модулятором 14 и задает частоту модуляции f0. Каждый из проходных датчиков 2, 3 и 12, например проходной датчик 2, содержит анализатор 17, механически связанный с двигателем 18, оптически с формирователем 19 начала отсчета и распределенным фотоприемником 20. Последний через блок 21 согласования, усилитель 22, демодулятор 23 связан с фильтром 24. В состав блока обработки 4 входят коммутатор 25, связанный с процессором 26, который соединен с блоком 27 включения датчиков и с контроллером 28 клавиатуры и индикации. Клавиатура 29 и блоки 30 и 31 индикации координат носового и кормового датчиков соединены с контроллером 28 клавиатуры и индикации. Выходы формирователя 19 начала отсчета связаны с коммутатором 25. К коммутатору 25 подключены также аналогичные выходы проходных датчиков 3 и 12.
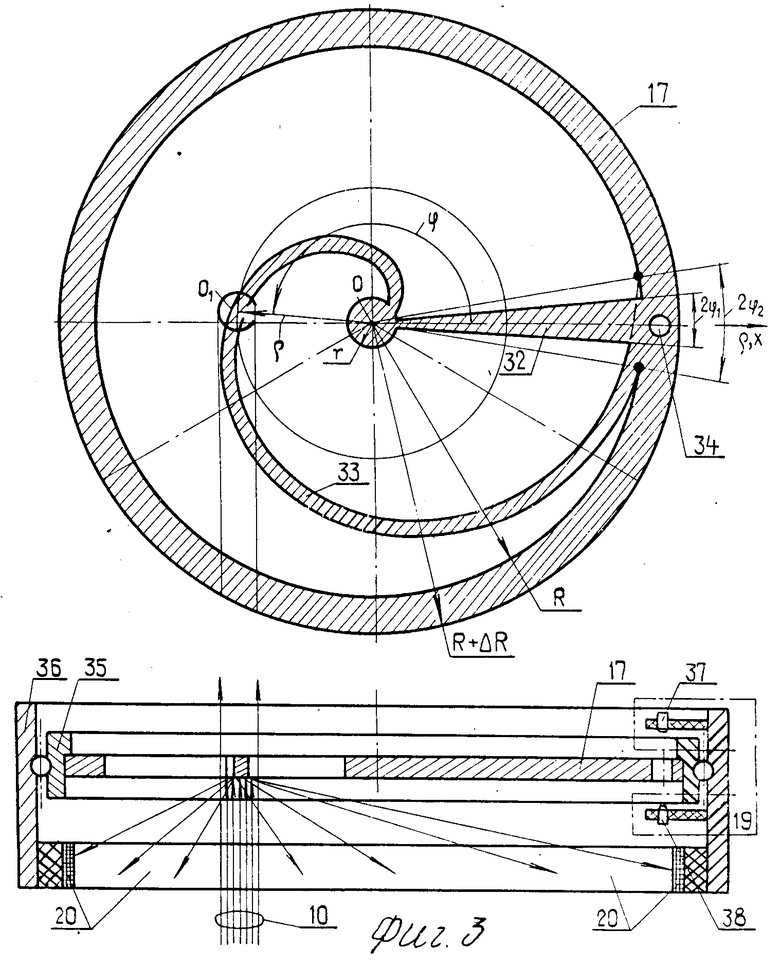
Анализатор 17 проходного датчика представляет собой кольцо радиуса R + ΔR с прозрачной зоной радиуса R, внутри которой имеется два непрозрачных сектора прямолинейный 32 и спиралевидный 33. В непрозрачной зоне, ограниченной радиусами R и R + ΔR, имеется прозрачное окно 34 для формирователя 19 начала отсчета. Две стороны прямолинейного сектора 32 расположены по радиусу диски R с углом раствора между ними 2 ϕ1 две стороны спиралевидного сектора 33 образованы спиралями Архимеда с началом в центре диска и развернутыми по радиусу диска на угол 2π. Обе спирали получены сдвигом относительно полярной оси ρ, проходящей по биссектрисе прямолинейного сектора, на угол + ϕ2 и ϕ2.
Устройство работает следующим образом. Генератор 15 задает частоту модуляции f0 луча излучателя 1. Как правило, анализатор 17 закреплен во внутренней обойме 35 подшипника, а распределенный фотоприемник 20 с изолирующей прокладкой закреплен на неподвижной внешней обойме 36 подшипника. Формирователь начала отсчета 19, состоящий из светодиода 37 и фотодиода 38, также закреплен на неподвижной обойме 36 подшипника. Анализатор 17 приводится во вращение двигателем 18, при этом связь между ними может быть кинематической, электромагнитной и др. в зависимости от выполнения двигателя 18; принципиального значения для работы устройства не имеет. Анализатор 17 может быть изготовлен из шлифовальной металлической пластины на электроэррозионном станке с числовым программным управлением (ЧПУ), позволяющим обеспечить точность реза порядка 5 мкм.
Проходные датчики 2 и 3 устанавливаются в носовом и кормовом сечении линии вала, соответственно. Плоскость вращения их анализаторов перпендикулярна опорному лучу.
Рассмотрим принцип измерения координат лазерного луча проходным датчиком на примере носового проходного датчика 2. Один раз за полный оборот анализатора 17 опорный луч пересекается прямолинейным 32 и спиралевидным 33 секторами, при этом происходит рассеяние его в большом телесном угле. Рассеянный световой поток попадает на распределенный фотоприемник 20, устанавливаемый перед анализатором со стороны падения светового потока. Распределенный фотоприемник 20 может состоять, например, из солнечных элементов ЭСК-14, наклеенных на изолирующую прокладку. Для обеспечения уверенного приема рассеянного анализатором 17 модулированного потока излучения и с целью компенсации большой собственной емкости распределенного фотоприемника 20, используется блок согласования 21, состоящий из индуктивности L и конденсатора развязки по постоянному току С. Индуктивность L подключается параллельно фотоэлементам распределенного фотоприемника 20 и ее значение определяется из условия резонанса контура на частоте модуляции f0опорного луча. Таким образом, фотоэлементы распределенного фотоприемника 20 работают в режиме короткого замыкания, обеспечивающим максимальную чувствительность и соотношение сигнал-шум на частоте модуляции f0. С выхода блока согласования 21 радиоимпульсы поступают на вход усилителя 22, затем детектируются в демодуляторе 23 и через фильтр 24 нижних частот сигнал огибающей Трфп поступает на вход коммутатора 25 блока обработки 4. Сигнал Трфп состоит из двух составляющих Тпр и Тсп импульсов, соответствующих пересечению прямолинейным 32 и спиралевидным 33 секторами анализатора 17 опорного луча. В данном случае длительность импульса τпр меньше длительности импульса τсп, поскольку угол раствора прямолинейного сектора 2ϕ1, выбран меньше угла раствора спиралевидного сектора 2ϕ2. Таким образом, эти импульсы легко идентифицировать по длительности.
Один раз за полный оборот диска анализатора 17 прозрачное окно 34 открывает путь световому потоку от световода 32 к фотодиоду 38, входящим в формирователь начала отсчета 19. На выходе последнего вырабатывается импульс Тно, поступающий на вход коммутатора 25 блока обработки 4. Период следования импульсов Тно равен периоду вращения анализатора 17Tw
Полярная координата ρ центра опорного луча относительно центра анализатора 17 пропорциональна длительности импульса τρ между центрами импульсов Тпр и Тсп, а полярная координата ϕ длительности импульса τ  между центрами импульсов Тпр и Тно. Значения этих координат вычисляются по определенным формулам. Использование описанного выше алгоритма определения координат по серединам импульсов позволяет полностью компенсировать погрешность определения координаты ϕ и в значительной степени погрешность координаты ρ от изменяющегося эффективного значения радиуса r пятна от опорного луча в плоскости анализатора 17. Под эффективным значением радиуса r понимается максимальное расстояние от центра пятна до точки, интенсивность излучения в которой равна порогу срабатывания распределенного фотоприемника 20 при наезде на пятно одного из секторов анализатора 17.
между центрами импульсов Тпр и Тно. Значения этих координат вычисляются по определенным формулам. Использование описанного выше алгоритма определения координат по серединам импульсов позволяет полностью компенсировать погрешность определения координаты ϕ и в значительной степени погрешность координаты ρ от изменяющегося эффективного значения радиуса r пятна от опорного луча в плоскости анализатора 17. Под эффективным значением радиуса r понимается максимальное расстояние от центра пятна до точки, интенсивность излучения в которой равна порогу срабатывания распределенного фотоприемника 20 при наезде на пятно одного из секторов анализатора 17.
В блоке обработки 4 производится идентификация измерительных сигналов Тно и Трфп, поступающих на его вход от проходных датчиков 2 и 3. Один из вариантов выполнения блока 4 представлен на фиг. 7. В качестве процессора 26 можно использовать однокристалльную микроЭВМ К1816ВЕ51. Эта микросхема содержит постоянное запоминающее устройство (ППЗУ) с ультрафиолетовым стиранием объемом 4 кбайт, оперативное запоминающее устройство (ОЗУ) емкостью 128 байт, два 16-разрядных таймера-счетчика, генератор со схемами синхронизации, один порт последовательного объема и три 1-байтовых параллельных порта ввода-вывода. В качестве коммутатора 25 можно использовать микросхемы К555КП12, К155КП5, К155КП1 в зависимости от необходимого числа подключаемых проходных датчиков. Блок 27 включения двигателей может состоять из дешифратора 39 (например, на микросхеме К555ИД4) и блока 40 реле. Вместо блока 40 реле может быть использован блок транзисторных ключей с оптронной развязкой. Контроллер клавиатуры и индикации может быть построен на базе контроллера 41 (микросхема К580ВВ79), дешифратора 42 (микросхема К55ИД4), усилителей 43 и 44 (например, на базе транзисторных ключей). Клавиатура 29 представляет собой матрицу кнопок, опрашиваемую контроллером 41 с помощью дешифратора 42. Блоки индикации координат 30 (носового) и 31 (кормового) проходных датчиков 2 и 3 содержат по восемь знакомест и могут быть собраны на любых семисегментных индикаторах (например АЛС-333). При необходимости в состав блока обработки 4 может быть включено дополнительно ППЗУ и ОЗУ, непосредственно подключаемые к процессору 26.
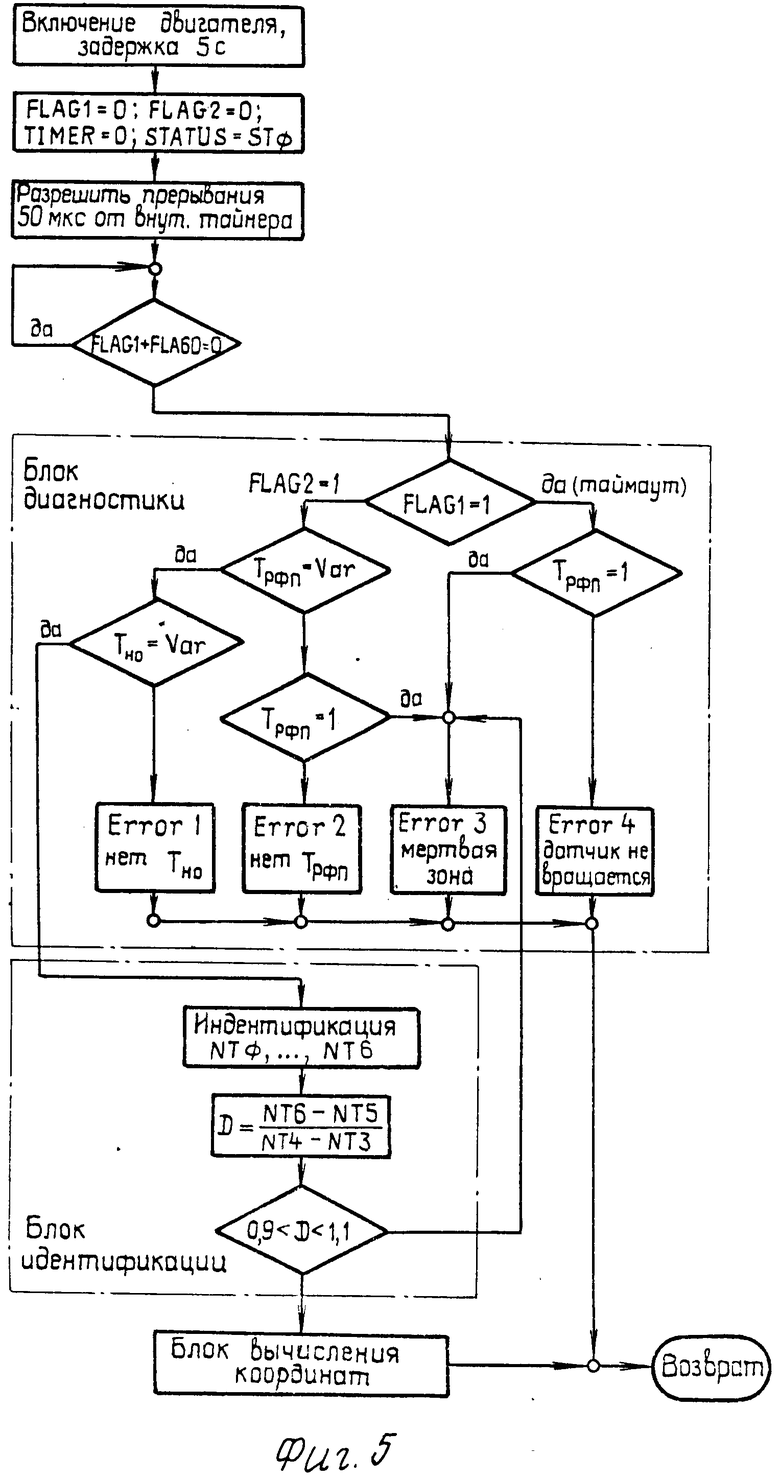
Принцип измерения и индентификации входных сигналов Тно и Трфпсостоит в следующем. Контроллер 26 по одной из встроенных программ, алгоритм которой представлен на фиг. 5, с помощью блока 27 включения датчиков запускает двигатель 18 проходного датчика 2 и дает временную задержку (5-6 с) на разгон анализатора 17. После этого производится начальная установка программных флагов FLAG 1 0. (обнуление счетчика максимального интервала проведения измерения ), FLAG 2 0 (обнуление счетчика буфера состояний сигналов Тно и Трфп), TIМER 0 (обнуление таймера реального времени), а также в буфер состояний заносится начальное значение STATUS STO сигналов Тно и Трфп. После этого разрешаются прерывания от внутреннего таймера с интервалом 50 мкс.
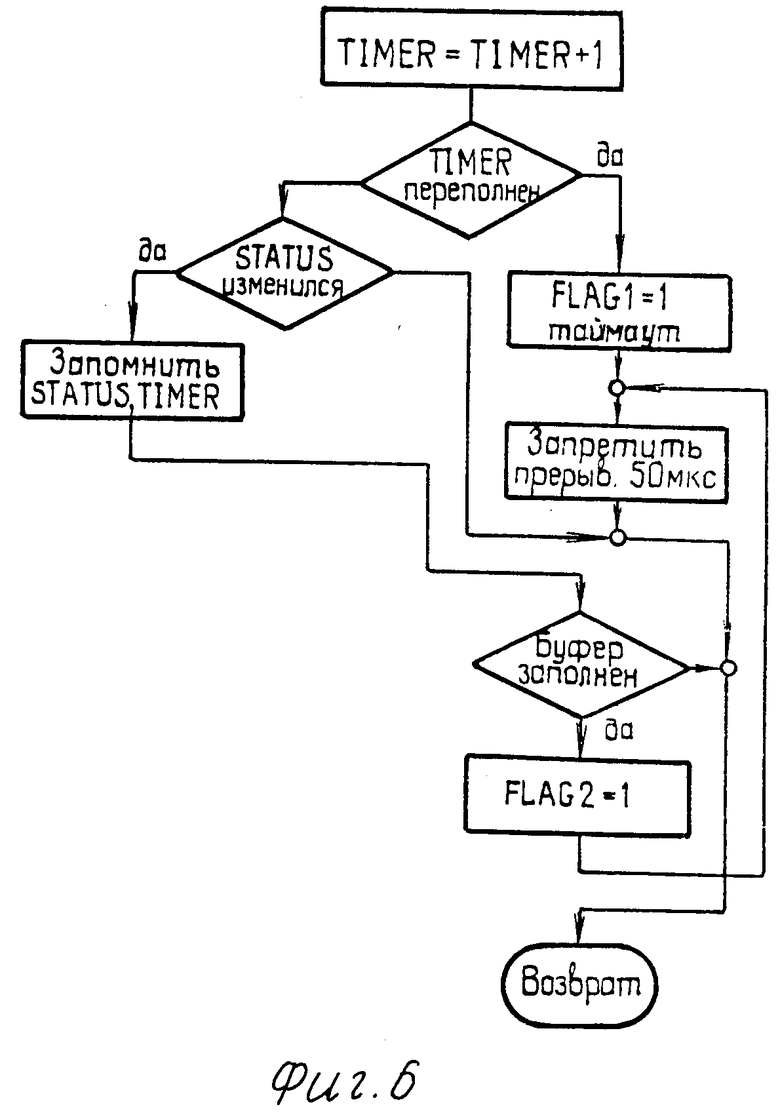
Алгоритм работы программы, обслуживающей прерывания от внутреннего таймера, представлен на фиг. 6. После поступления очередного прерывания инкрементируется таймер реального времени, проверяется состояние входных сигналов Тно и Трфп и, если это состояние отличается от предыдущего, в буфер состояний записывается его значение и соответствующее значение таймера реального времени (слово состояния). Как будет показано ниже, для полной индентификации измерительных сигналов максимальный размер буфера состояний должен быть равен 14 словам. После записи очередного слова состояния проверяется заполнение буфера. В случае, если буфер заполнен, устанавливается FLAG 1 1, запрещаются прерывания и управление передается для идентификации неисправностей.
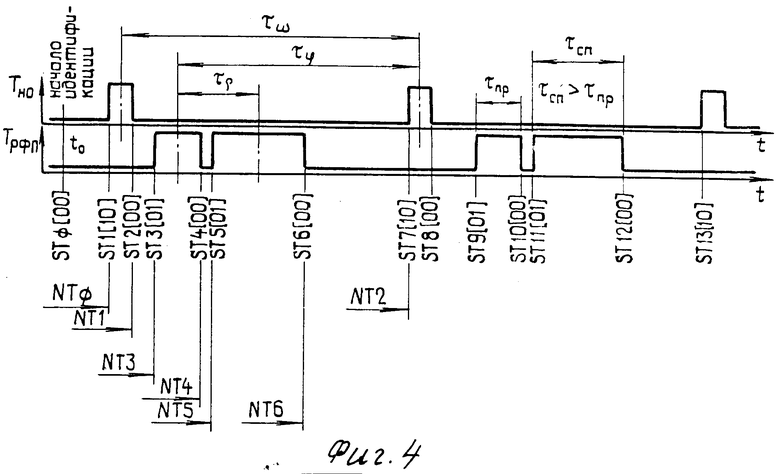
Принцип идентификации входной информации представлен на фиг. 4. На верхней диаграмме показаны значения слов состояний, занесенных в буфер состояний (всего 14 слов), при этом момент времени t0 соответствует старту основной программы. Идентификация сигналов Тно, Тсп и Тпрначинается со слова состояния, соответствующего низким уровням сигналов Тно и Трфп (на верхней диаграмме ТО). Буфер состояний имеет вид:
ST 0 + TIMER 0 (1-е слово состояния)
ST 1 + TIMER 1 (2-е слово состояния)
ST 2 + TIMER 2 (3-ье слово состояния)
ST 13 + TIMER 13 (14-е слово состояния)
Моменты времени, соответствующие первым трем изменениям состояния сигналов Тно (после начала идентификации), определяются следующим образом: NT 0 TIMER 1; NT 1 TIMER 2; NT 2 TIMER 3. Моменты времени, соответствующие первым четырем изменениям состояния сигнала Трфп (после начала идентификации), принимаются равными: NT 3 TIMER 3; NT 4 TIMER 4; NT 5 TIMER 5; NT 6 TIMER 6.
Формулы, по которым вычисляются интервалы N  , N
, N  и N
и N  , следуют из временной диаграммы и для разных случаев начала идентификации, представлены на фиг. 4. Как видно из временных диаграмм, для полной идентификации интервалов времени необходимо запомнить изменения сигналов Тно и Трфп за два оборота анализатора. При этом достаточно размер буфера состояния ограничить 14 словами.
, следуют из временной диаграммы и для разных случаев начала идентификации, представлены на фиг. 4. Как видно из временных диаграмм, для полной идентификации интервалов времени необходимо запомнить изменения сигналов Тно и Трфп за два оборота анализатора. При этом достаточно размер буфера состояния ограничить 14 словами.
Как видно из алгоритма измерения координат (фиг. 5), после установки одного из флагов состояния (FLAG 0 1 или FLAG 1 1), управление передается блоку диагностики, в котором проверяется наличие изменений состояния сигналов Тно и Трфп за время измерения и идентифицируются четыре типа ошибок:
Error 1 нет сигнала Тно;
Error 2 нет сигнала Трфп;
Error 3 "мертвая зона" (сигнал Тно поступает, а пятно от опорного луча попадает в центр анализатора или на его периферию Трфп 1 соnst);
Error 4 "датчик не вращается" (одновременно отсутствуют сигналы Тно и Трфп).
По завершению диагностики производится идентификация временных интервалов NT0,NT6 по описанному выше алгоритму. Затем производится проверка на "слипание" импульсов Тпр и Тсп (это может произойти, когда пятно от опорного луча находится на периферии диска анализатора и сигналы от пересечения пятна прямолинейным и спиралевидным секторами анализатора "слипаются" между собой). При этом длительности идентифицированных по приведенному выше алгоритму импульсов Тпр и Тспсовпадут. Это состояние будет определено программой как ошибка типа "мертвая зона".
В случае правильной идентификации временных интервалов NT0,NT6 в блоке вычисления координат определяются значения N  , N
, N  и N
и N  , а затем вычисляются значения полярных координат центра луча относительно центра анализатора по формулам:
, а затем вычисляются значения полярных координат центра луча относительно центра анализатора по формулам:
ρ R  ϕ 2π
ϕ 2π 
Для минимизации случайной погрешности вследствие турбулентности тракта между излучателем 1 и проходными датчиками 2 и 3 может быть использована статистическая обработка результатов измерения. Практика показывает, что достаточно эффективно простое усреднение n результатов измерений, где n 20-30 в зависимости от условий трассы. После определения полярных координат ρ и ϕ результат измерения переводится в декартову систему координат и запоминается в ОЗУ процессора для дальнейшей обработки.
Таким образом, данное устройство выгодно отличается от известного тем, что проходной датчик обладает:
высокой точностью определения порядных координат ρ и ϕ центра опорного луча относительно центра анализатора;
значительным подавлением случайной погрешности из-за турбулентности воздушного тракта между излучателем и анализатором;
бесконтактностью метода измерения и проходным режимом работы.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЯ В КОД | 1990 |
|
RU2025042C1 |
| Преобразователь перемещения в напряжение | 1987 |
|
SU1803979A1 |
| Преобразователь перемещения в напряжение | 1989 |
|
SU1837391A1 |
| Лазерное устройство для контроля непараллельности | 1987 |
|
SU1682777A1 |
| Способ контроля положения объекта относительно опорного луча и устройство для его осуществления | 1987 |
|
SU1674368A1 |
| Преобразователь перемещения в напряжение | 1986 |
|
SU1681383A1 |
| Преобразователь перемещения в код | 1983 |
|
SU1156255A1 |
| Фотоэлектрическое устройство для измерения перемещений объектов | 1989 |
|
SU1728659A1 |
| Двухкоординатный оптический преобразователь перемещения в напряжение | 1987 |
|
SU1442833A1 |
| Преобразователь перемещения в код | 1987 |
|
SU1510083A1 |
Использование: в судостроении для центровки судовых механизмов по теоретической оси валопровода. Цель: повышение точности и снижение трудоемкости центровки. Сущность изобретения: устройство содержит излучатель, коллиматор, установленный по ходу излучения, проходные датчики, анализаторы, которые оптически связаны с излучателем и механически - с двигателем. Устройство снабжено блоком обработки, генератором, блоками согласования, усилителями, демодуляторами, фильтрами, модулятором и распределенными фотоприемниками, установленными перед анализаторами. Каждый фотоприемник через соответствующий блок согласования, усилитель, демодулятор и фильтр связан с блоком обработки, к которому подключен формирователь начала отсчета. Каждый анализатор имеет непрозрачную зону в виде кольца, внутри которого расположены два непрозрачных сектора, один из которых прямолинейный, а другой - спиралевидный. Непрозрачная зона анализатора в виде кольца и непрозрачные секторы внутри этой зоны образуют жесткую конструкцию пластинчатой формы. 7 ил.
УСТРОЙСТВО ДЛЯ ЦЕНТРОВКИ СУДОВЫХ МЕХАНИЗМОВ по теоретической оси валопровода, содержащее излучатель, коллиматор, установленный по ходу излучения, проходные датчики, анализаторы которых оптически связаны с излучателем и механически с двигателями, при этом каждый анализатор проходного датчика имеет непрозрачную зону в виде кольца, внутри которого расположены два непрозрачных сектора, один из которых прямолинейный, стороны которого расположены по внутренним радиусам кольца, а другой спиралевидный, стороны которого образованы спиралями Архимеда с началом в центре кольца и развернутыми по радиусу кольца на угол 2π, при этом обе спирали получены сдвигом относительно полярной оси, проходящей по биссектрисе прямолинейного сектора на одинаковый угол, превышающий угол сдвига каждой из сторон прямолинейного сектора относительно полярной оси, а в непрозрачной зоне кольца в районе прямолинейного сектора выполнено прозрачное окно для формирователя начала отсчета, отличающееся тем, что, с целью повышения точности и снижения трудоемкости центровки, оно снабжено блоком обработки, генератором, блоками согласования, усилителями, демодуляторами, фильтрами и модулятором, установленным на пути излучения между излучателем и коллиматором и электрически связанным с генератором, а также распределенными фотоприемниками, установленными перед анализаторами проходных датчиков и оптически связанными с ними, причем каждый распределенный фотоприемник через соответствующий блок согласования, усилитель, демодулятор и фильтр связан с блоком обработки, к которому подключен формирователь начала отсчета, а непрозрачная зона анализатора в виде кольца и непрозрачные сектора внутри этой зоны образуют жесткую конструкцию пластинчатой формы.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Лазерное устройство для контроля непараллельности | 1987 |
|
SU1682777A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
