UiLf
1%
Ии .
сд
31510083
выходного кода, введены второй формирователь выходного кода, блок уп- равления, измерительный растр, фото- ре гистрирующее устройство, элемент с ИЛИ и одновибратор. В качестве излучателя применяется двухчастотный лазер, вырабатывающий два соосных луча с длинами волн 21 и 22. Х-образ-i
ная форма анализатора и конструкция фотоприемного устройства позволяют получать на выходах формирователей выходного .кода коды координат N и N2, от различных лучей 21 или 22, что позволяет выбирать нужную пару координат в зависимости от необходимой погрешности, 4 з.п. ф-лы, 3 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля положения объекта относительно опорного луча и устройство для его осуществления | 1987 |
|
SU1674368A1 |
| Преобразователь перемещения в код | 1983 |
|
SU1170615A1 |
| Лазерное устройство для контроля непараллельности | 1987 |
|
SU1682777A1 |
| Преобразователь перемещения в код | 1983 |
|
SU1156255A1 |
| ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЯ В КОД | 1990 |
|
RU2025042C1 |
| Преобразователь перемещения в напряжение | 1989 |
|
SU1837391A1 |
| ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ С КАНАЛОМ ОПТИЧЕСКОЙ ОБРАТНОЙ СВЯЗИ (ВАРИАНТЫ) | 2009 |
|
RU2410722C1 |
| Преобразователь перемещения в напряжение | 1987 |
|
SU1803979A1 |
| Двухкоординатный оптический преобразователь перемещения в напряжение | 1987 |
|
SU1442833A1 |
| УСТРОЙСТВО ДЛЯ ЦЕНТРОВКИ СУДОВЫХ МЕХАНИЗМОВ | 1990 |
|
RU2033596C1 |
Изобретение относится к информационно-измерительной вычислительной технике и может быть использовано , в частности, для оперативного контроля сварочных перемещений и деформаций широкого класса изделий в процессе сварки. Целью изобретения является повышение точности и расширение области применения преобразователя. Поставленная цель достигается тем, что в преобразователь перемещения в код, содержащий излучатель, оптически связанный через коллиматор и анализатор с фотоприемным устройством, формирователь начала отсчета, реверсивный двигатель, формирователь выходного кода, введены второй формирователь выходного кода, блок управления, измерительный растр, фоторегистрирующее устройство, элемент ИЛИ, и одновибратор. В качестве излучателя применяется двухчастотный лазер, вырабатывающий два соосных луча с длинами волн 21 и 22. Х- образная форма анализатора и конструкция фотоприемного устройства позволяют получать на выходах фермирователей выходного кода коды координат N1 и N2 от различных лучей 21 или 22, что позволяет выбирать нужную пару координат в зависимости от необходимой погрешности. 4 з.п. ф-лы, 3 ил.
Изобретение относится к информационно-измерительной и вычислительной технике и может быть использовано, в частности, для оперативного контроля сварочных перемещений и деформа- ций широкого класса изделий в процессе сварки.
.-.
Целью изобретения является повышение точности и расширение области применения преобразователя.
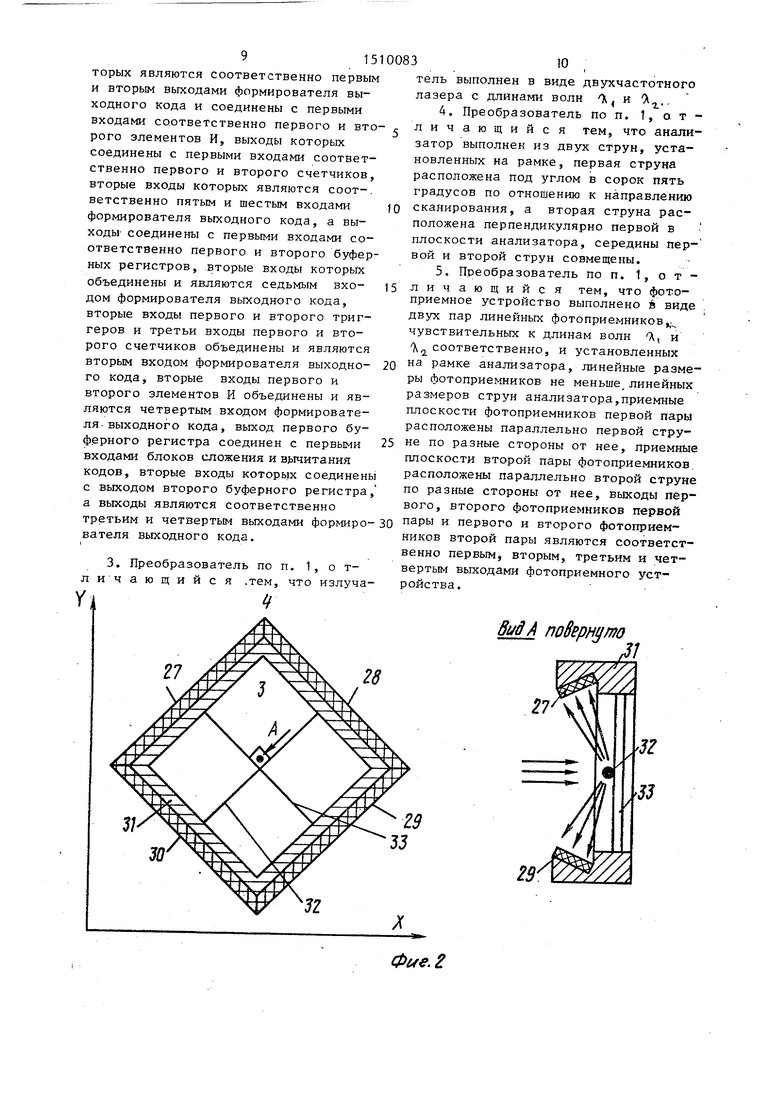
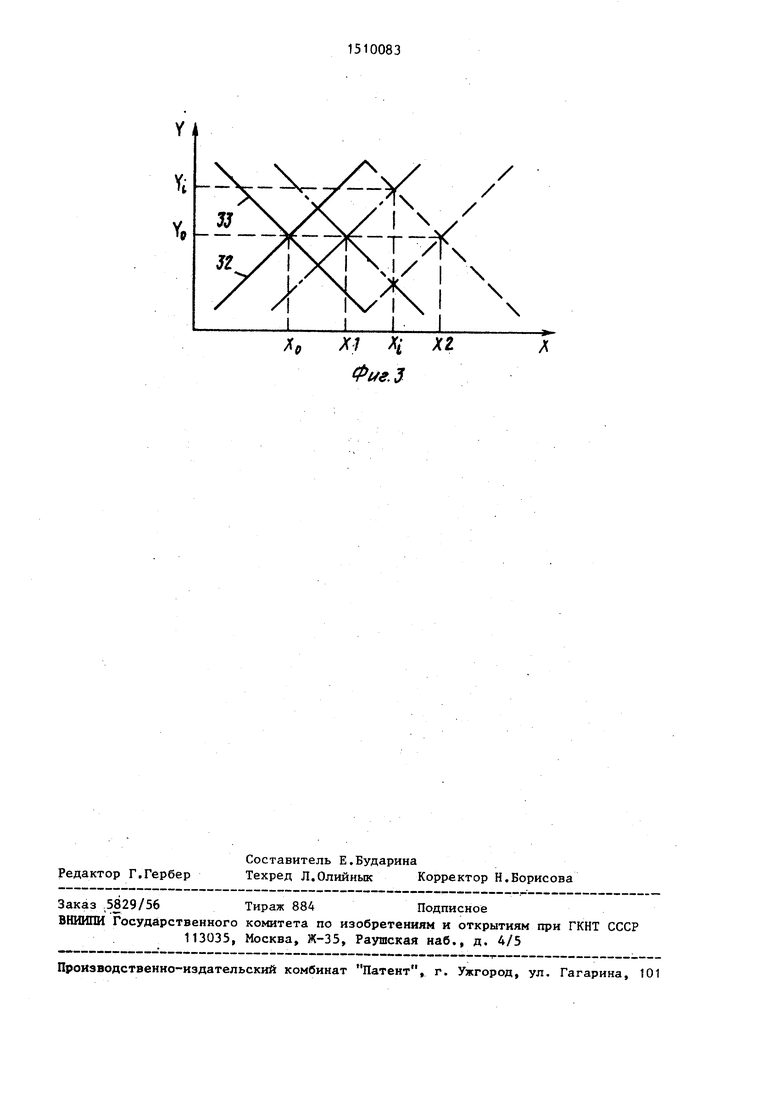
На фиг. 1 изображена структурная схема преобразователя перемещения в код и блока формирования выходного кода; НД фиг. 2 - конструкция анализатора и фотоприемного устройства, взаимное расположение фотоприемникрв на фиг. 3 - пример определения коор- .динат .анализатора относительно лазерного луча.
Преобразователь содержит излучатель 1, коллиматор 2(, анализатор 3, фотоприемное устройство 4, формирователь 5 начала отсчета, реверсивный двигатель 6, формирователь 7 выходного кода, измерительный растр 8 с прозрачным окном 9, фоторегистрирую- щее устройство 10, формирователь 11 выходного кода, блок 12 управления, элемент ИЛИ 13, одновибратор 14, кажда|й из формирователей 7 и 11 выходного кода содержит формирователи 15 и 16 импульса, триггеры 17 и 18, элементы И 19 и 20, счетчики 21 и 22 буферные регистры 23 и 24, блок 25 сложения, кодов, блок 26 вычитания
кодов. Фотоприемное устройство 4 со
держит линейные фотоприемники 27-30.
Анализатор 3 выполнен в виде X- образного перекрестия и установленного на рамке 31 и состоящего из струн 32 и 33. Струна 32 расположена под углом сорок пять градусов по отношению к оси X, являющейся направлением сканирования, а струна 33 расположена перпендикулярно первой в
15
20
30
35 4045
50
с плоскости анализатора 3, причем середины струн 32 и 33 совмещены. Фотоприемное устройство 4 установлено на рамке 31 и состоит из четырех линейных фотоприемников 27-30, линейные размеры которых совпадают или больше размеров струн 32 и 33 анализатора 3, при этом фотоприемники 27 и 28 работают на длине волны ,, , а фотоприемники 29 и 30 - на длине волны )), причем концы фотоприемников 27 и 29 расположены напротив концов струны 32, а плоскости фотоприемников 27 и 29 расположены параллельно струне 32, концы фотоприемников 28 и 30 расположены напротив концов струны 33, а плоскости фотоприемников 28 и 30 расположены параллельно струне 33 таким образом, чтобы обеспечить оптическую связь фотоприемников 27 и 29 с излучателем 1 только через струну 32, а фотоприемников 28 и 30 - только через струну 33, причем выходы фотоприемников 27-30 являются выходами фотоприемного устройства 4. В качестве излучателя 1 используется двухчастотный лазер, при ЭТОМ излучатель 1 оптически связан через коллиматор 2 и анализатор 3 с фотоприемным устройством 4 посредством двух соосных лучей, причем один луч имеет длину волны А, , а другой луч имеет длину волны
Преобразователь работает следующим образом.
Излучатель 1, в качестве которого может быть использован, например, АИГ-лазер, работающий в режиме генерации второй гармоники, с закрепленным на нем коллиматором 2 устанавливается на неподвижной базовой оснастке и применяется для задания опорно го направления с помощью двух соосных лучей с длинами волн Д, (1,06 мкм)
5,
и Ai (0,53 мкм). Анализатор 3 и связанные с ним фотоприемное устройство 4, формирователь 5 начала отсчета, реверсивный двигатель 6, измерительный растр 8 с прозрачным окном 9 и фоторегистрирующее устройство 10 расположены в контролируемой точке объекта. Расположение остальных блоков может быть произвольное. Реверсивный двигатель 6 обеспечивает возвратно-поступательное движение анализатора 3 с фотоприемным устройством 4 и измерительного растра 8 с прозрачным окном 9 в плоскости, перпендикулярной опорному направлению. При движении каретки реверсивного двигателя 6 вправо прозрачное окно 9 пересекает формирователь 5 начала отсчета, на выходе которого появляется импульс начала отсчета .,(, Импульс Т но устанавливает выходы триггеров 17 и 18 в единичное состояние и производит запись кода начальной установки NQ, и N, соответствующего заданным координатам- Хд и Y, поступающего на входы формирователей 7 и 11 выходного кода, в счетчики 21 и, 2.. Причем на входах элементов И 19 и 20 появляется последовательность счетных импульсов Т. с выхода фоторегистрирующего устройств а 10, количество которых пропорционально перемещению каретки. -Так как на вторых входах элементов И 19 и 20 присутствует уровень логической единицы счетные импульсы проходят на счетные входы счетчиков 21 и 22. При пересечении анализатором 3 опорных лучей , и TI.. струны 32 и 33 с диффузно- отражающей поверхностью рассеивают излучение в плоскости, задаваемой опорным лучом и нормально к оси струны (фиг. 2). Фотоприемники 27 и 29 принимают излучение рассеянное струной 32, а фотоприемники 28 и 30 - струной 33. Линейные фотоприемники могут быть заменены на фотоприемники с малой фоточувствительной областью, но в этом случае они допжны располагаться в фокусах соответственно сори ентированных цилиндрических линз. На выходах фотоПриемников формируются импульсы и поступают на входы формирователей 15 и 16. Формирователи 15 и 16 могут быть выполнены, например, по известной схема фиксации положения максимума импульса, позволяющей реализовать потенциально мет
0083
рологические возможности преобразователя. Таким образом, на выходах формирователей 15 и 16 формируются импульсы Т, и Т2 соответственно, положения передних фронтов которых соответствуют максимумам сигналов на выходах фoтoпpиe fflикoв 27-30. В случае, если опорный луч находится по
Q отношению к перекрестию анализатора выше траектории, по которой перемещается центр перекрестия (фиг. 3), в первую очередь его пересечет струна 32 в точке Х1, а затем - струна 33
5 в точке Х2. Следовательно, первым сформируется импульс Т,, а затем - импульс Т. В противном случае первым сфорьшруется импульс Т. Эти импульсы подаются на входы сброса тригге0 ров 17 и 18 и устанавливают их выходы в нулевое состояние. При этом прохождение счетных импульсов Т через элементы И 19 и 20 прекращается, а на выходах счетчиков 21 и 22 устанав5 ливаются коды N, и N2 , соответствующие положениям анализатора 3 - XI и Х2 относительно начального положения Хр. Причем на выходе элемента 1-ШИ 13 формируется импульс, фронт
эд которого соответствуе.т моменту появ.ления импульса начала отсчета Т
Но
а срез - моменту появления последнего импульса на выходе фотоприемного устройства и несущего информацию о том, что цикл измерения закончен. Од- новибратор 14 формирует по срезу импульса с выхода элемента ИЛИ 13 импульс Конец преобразования Т , который меняет полярность напряжения - питания реверсивного двигателя 6, вследствие чего анализатор 3 с закрепленными на нем блоками начинает перемещаться в обратном направлении. Этим же импульсом в буферные регистры 23 и 24 производится запись кодов 5 ,. I ,, I
N и N , установившихся на выходах счетчиков 21 и 22. При перемещении анализатора 3 в крайнее левое положение прозрачное окно 9 пересечет формирователь 5 начала отсчета, на выходе которого при этом появится импульс, устанавливающий в блоке 12 управления первоначальное положение, и цикл преобразования возобновится. И-з фиг. 3 .видно, что вследствие выбранной геометрии анализатора 3, по результатам измерения координат XI и Х2 текущие координаты лазерного луча XI и Y3 относительно заданного
начального значения Х и Y можно найти следующим образом.
XI « (XI + Х2)/2,
Y1 (Х2 - Х1)/2. (1)
В двоичном коде зависимости (1) яаписываются в виде
(N:
(N4 . N
N;
)/2, )/2
(2)
Коэффициент 1/2 может быть учтен, например, при выборе шага изкери- 15 тельного растра 8. Таким образом, задача нахождения координат контролируемой точки объекта по результатам измерений сводится к решению уравнений:20
N, + Nj,
N; - N;
(3)
Последние зависимости реализуются с помощью блоков 25 и 26 суммирования и вычитания кодов. При этом код на выходах формирователя 7 выходного кода соответствует координатам контролируемой точки объекта относитель- но опорного луча Л, - N( /,), Nu(4), а на выходах формирователя 11 выходного кода - относительно опорного луча Л - NxC)., N(2) Причем опорный лазерный луч А- используется как контрольный.
Таким образом, появляется дополнительная возможность увеличения точности измерений за счет выборки только тех измерений, которые удовлетворяют условию
пустимые погрешности измерений.
Формула изобретения
IN.CA,) - N.c) : N,,
iNjjC A,) - N.jC A) .e, мс, максимально до
5 0
5 О
5
0
5
0
дом первого формирователя выходного кода, второй вход которого подключен к выходу формирователя начала отсчета, отличающийся тем, что, с целью повышения точности и расширения области применения преобразователя, в него введены фоторегистрирую-. щее устройство, второй фотопреобразователь выходного кода, блок управления, элемент ИЛИ, одновибратор, измерительный растр с прозрачным окном, механически связанный с реверсивным двигателем и оптически - с формирователем начала отсчета и. с фоторегистрирующим устройством, второй выход фотоприемного устройства соединен с первым входом второго формирователя вькодного кода, выход формирователя начала отсчета соединен с первым входом блока управления и с вторым входом второго формирователя выходного кода, третий и четвертый выходы фотоприемного устройства соединены с третьими входами соответственно первого и второго формирователей выходного кода, выход фоторегистрирующего устройства соединен с четвертыми входами первого и второго формирователей выходного кода, пятые и шестые входы которых являются входами установки начального кода преобразователя, а первые и вторые выходы соединены с соответствующими входами элемента ШШ, выход которого соединен с входом одновиб- ратора, выход которого соединен с вторым входом блока управления и с седьмыми входами первого и второго формирователей выходного кода,третьи и четвертые выходы которых являются выходами преобразователя, выход блока управления.соединен с реверсивным двигателем.
30
Вид А по8ери11/по
21
Фие.г
Y Ус
л; i xt
.З
| Лебедько Е.Г | |||
| и др | |||
| Теория и расчёт импульсных и цифровых оптико- электронных систем | |||
| - Л.: Машиностроение, 1984, с | |||
| Устройство непрерывного автоматического тормоза с сжатым воздухом | 1921 |
|
SU191A1 |
| Мовсесян Р.А | |||
| и др | |||
| Устройство для регистрации положения оси светового пучка | |||
| - Геодезия и картография, 1974, № 1, с | |||
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Преобразователь перемещения в код | 1983 |
|
SU1170615A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
