Изобретение относится к области взвешивания различных грузов и может быть использовано в промышленных условиях, где имеют место агрессивная среда и высокие температуры.
Известны весы, использующие переменный радиус навивки тяговой связи, к которой подвешено грузоприемное устройство [1]
Однако такие весы имеют небольшой диапазон измерений и, кроме того, содержат сложную в изготовлении деталь тело вращения переменного радиуса кривизны.
Наиболее близким техническим решением к предлагаемому является весоизмерительное устройство, содержащее наклонную направляющую, тело качения в виде двухступенчатого барабана, первой ступенью расположенного на наклонной направляющей, а второй ступенью связанного с возможностью навивки на нее с одним из концов гибкой тяговой связи, другой конец которой соединен с весовым бункером, и отсчетный узел со шкалой, расположенной в вертикальной плоскости, параллельной наклонной направляющей [2]
Цель изобретения разработать конструкцию механического весоизмерительного устройства, имеющего широкий диапазон измерений при одновременной конструктивной простоте и надежности работы устройства, позволяющего использовать его в неблагоприятных промышленных условиях.
Для этого в весоизмерительное устройство, содержащее наклонную направляющую, тело качения в виде двухступенчатого барабана, первой ступенью установленного на наклонной направляющей, а второй ступенью связанного с возможностью навивки на нее с одним из концов гибкой тяговой связи, другой конец которой соединен с весовым бункером, и отсчетный узел со шкалой, расположенной в вертикальной плоскости, параллельной наклонной направляющей, введена гибкая несущая связь, одним концом закрепленная на первой ступени барабана с возможностью навивки на нее, а другим на верхней части наклонной направляющей, выполненной прямолинейной, причем ступени барабана выполнены с эксцентриситетом друг относительно друга.
В устройстве шкала может быть выполнена сменной, а ступенчатый барабан может быть снабжен средством для регулирования установки величины эксцентриситета.
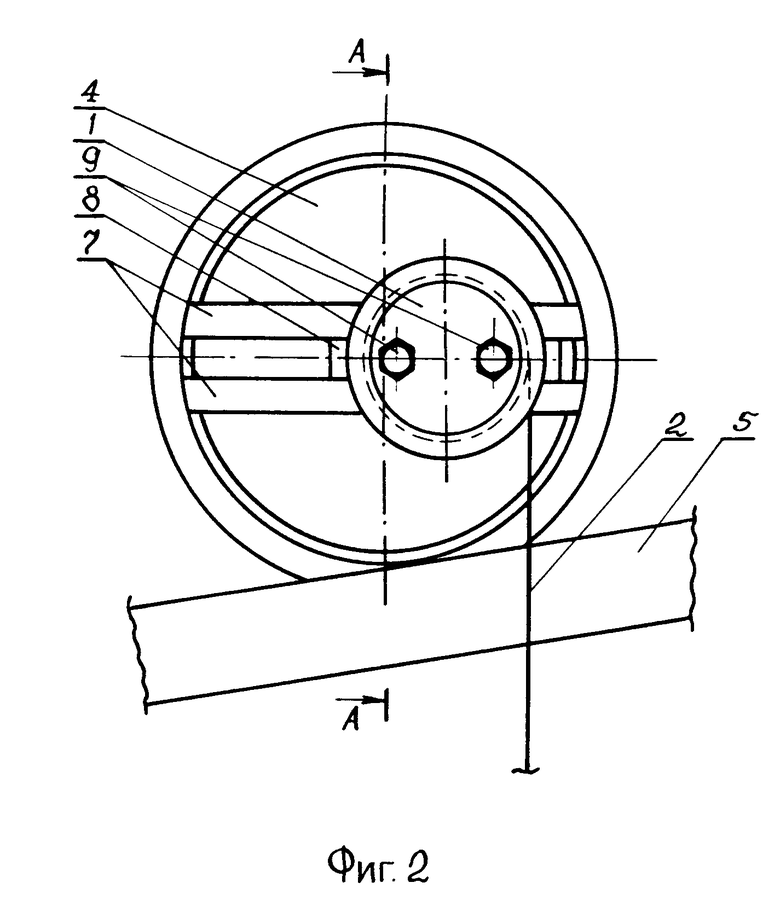
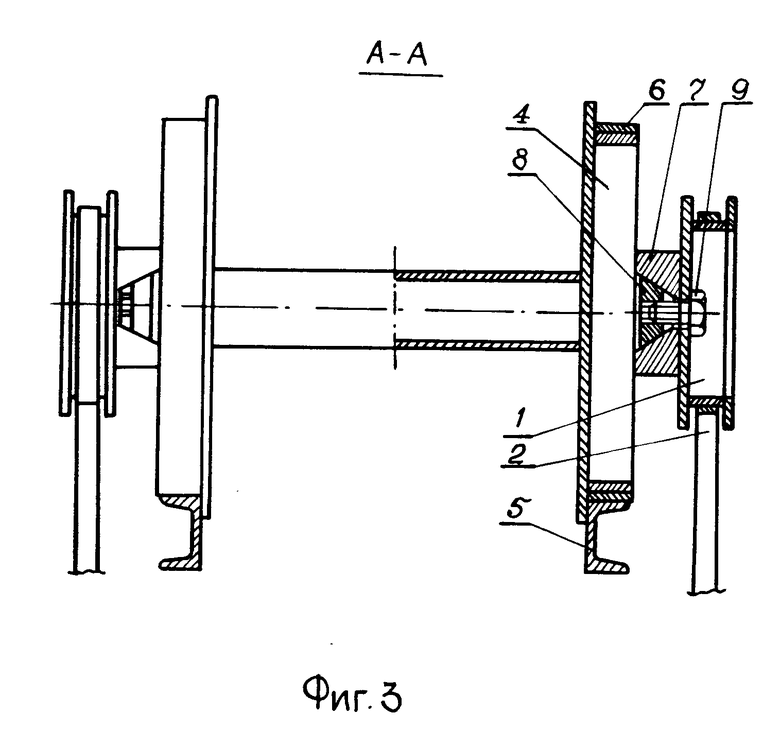
На фиг. 1 приведена принципиальная схема весоизмерительного устройства; на фиг. 2 возможный вариант выполнения средства для регулирования величины эксцентриситета между ступенями барабана; на фиг. 3 разрез А-А на фиг. 2.
Весоизмерительное устройство содержит двухступенчатый барабан, на тяговой ступени 1 которого одним концом закреплена с возможностью навивки на нее гибкая тяговая связь 2. Другой конец гибкой тяговой связи 2 соединен с весовым бункером 3. Другая ступень 4 барабана, являясь поверхностью качения, расположена на наклонной направляющей 5. На поверхности ступени 4 барабана закреплена с возможностью навивки гибкая несущая связь 6. Другой конец связи 6 закреплен в верхней части наклонной направляющей 5. Ступени 1 и 4 барабана соединены между собой с возможностью совместного вращения. Соединение может быть клиновым, как показано на фиг. 2 и 3, болтовым (не показано) или каким-либо иным. Ступени 1 и 4 барабана выполнены с эксцентриситетом друг относительно друга. Барабан снабжен средством для регулируемой установки величины эксцентриситета. Изменение величины эксцентриситета целесообразно в пределах + 1
+ 1 R sinα-r > e > r-
R sinα-r > e > r- + 1
+ 1 R sinα где r радиус поверхности навивки ступени 1 барабана;
R sinα где r радиус поверхности навивки ступени 1 барабана;
R радиус поверхности качения ступени 4 барабана;
m1-4 и m3 массы соответственно барабана и весового бункера 3;
α угол наклона направляющей 5;
е величина эксцентриситета.
Средство для регулируемой установки величины эксцентриситета ступеней 1 и 4 барабана выполнено в виде клиновой направляющей 7, жестко закрепленной на ступени 4 барабана. Внутри паза клиновой направляющей 7 размещен с возможностью продольного перемещения клин 8. Клин 8 имеет по крайней мере два отверстия с резьбой, в которых установлены стопорные болты 9.
Конструкция средства для регулируемой установки величины эксцентриситета может быть и любой другой. Например, для упрощения конструкции вместо клиновой направляющей 7 можно установить сплошную пластину, вдоль которой (по диаметру ступени 4 барабана) выполнить ряд отверстий с резьбой. Можно эти отверстия разместить и непосредственно на фланце ступени 4 барабана. Переставляя в этих отверстиях стопорные болты 9, можно также добиться изменения величины эксцентриситета. Такая конструкция проще, однако в этом случае невозможно плавное изменение величины эксцентриситета.
Можно также вместо клиновой направляющей 7 применить ходовой винт, вращая который можно изменять положение тяговой ступени 1 посредством неизменно связанной с ней гайки относительно ступени 4 барабана, регулируя тем самым величину эксцентриситета. Регулирование в этом случае получится плавным. Такая конструкция позволяет легко обеспечить синхронность перемещения левой и правой частей ступени 1, однако она сложнее и дороже.
Весоизмерительное устройство содержит также сменную измерительную шкалу 10 и буферное устройство 10. Изменяя угол наклона направляющей 5 по отношению к первоначальному положению, можно, с одной стороны, добиться расширения диапазона измерений, а с другой регулировать точность измерений. Чем больше угол α тем ниже точность измерений, зато тем большее значение массы груза можно измерить при помощи предлагаемого устройства. Роль указателя значения измеряемой массы выполняет гибкая тяговая связь 2. Шкалу 10 можно расположить вдоль направляющей 5 и отсчет вести по положению барабана относительно направляющей (шкалы).
Весоизмерительное устройство работает следующим образом.
На барабан, расположенный на наклонной направляющей 5, действуют два момента внешних сил: тяговый (от сил тяжести весового бункера 3 с грузом или без него) и противодействующий (от сил тяжести самого барабана).
Если гибкая тяговая связь 2 проходит правее мгновенной оси барабана, то эти моменты всегда будут иметь противоположные знаки. При равенстве этих моментов барабан будет неподвижен.
В исходном положении (при отсутствии груза) тяговый момент будет минимальным и барабан будет располагаться в нижней части наклонной направляющей 5 (левое крайнее положение на фиг. 1). Барабан в этом положении располагают таким образом, чтобы геометрические центры обеих ступеней 1 и 4 барабана находились на горизонтали, причем центр тяговой ступени 1 был справа. Это положение соответствует нулевому значению шкалы 10.
Если в бункер 3 поместить взвешиваемый груз, то тяговый момент возрастет и барабан начнет перекатываться вправо вверх по наклонной направляющей 5. Несущая гибкая связь 6 при этом будет навиваться на ступень 4 барабана, а тяговая гибкая связь 3 свиваться с тяговой ступени 1. За счет поворота барабана и наличия эксцентриситета между его ступенями 1 и 4, плечо тягового момента будет уменьшаться, а следовательно, уменьшаться будет и величина тягового момента по сравнению с постоянным противодействующим моментом. Продолжаться это будет до тех пор, пока значения обоих моментов не сравняются. Барабан при этом остановится. Расстояние, на которое переместится барабан по отношению к первоначальному своему положению, пропорционально массе взвешиваемого груза. Значение массы считывается со шкалы 10 весоизмерительного устройства. После удаления груза из весового бункера 3 барабан самопроизвольно возвратится в исходное положение. При этом гибкая тяговая связь 2 навивается на тяговую ступень 1, перемещая весовой бункер 3 в начальное положение, а гибкая несущая связь 6 свивается со ступени 4 барабана. Для снижения динамических нагрузок служит буферное устройство 11.
Цикл измерения предельного по величине значения массы груза вынуждает барабан совершить полоборота. Поэтому длина шкалы 10, измеренная по горизонтали при любом эксцентриситете, определится формулой
L=π Rcos α, где R радиус ступени 4 барабана;
α угол наклона направляющей 5 к горизонту.
Предел взвешивания, т. е. максимальную величину массы взвешиваемого груза, при заданном эксцентриситете определяют по формуле
m m3 где m1-4 суммарная масса ступеней 1 и 4 барабана;
m3 где m1-4 суммарная масса ступеней 1 и 4 барабана;
m3 масса весового бункера 3;
r и R радиусы соответственно ступеней 1 и 4 барабана;
е эксцентриситет ступеней 1 и 4 барабана;
α угол наклона направляющей 5 к горизонту.
При необходимости взвешивать груз большей массы достаточно увеличить величину е эксцентриситета. Для этого достаточно ослабить стопорные болты 9, после чего клин 8 вместе с тяговой ступенью 1 получит возможность перемещаться вдоль клиновой направляющей 7. При достижении желаемой величины эксцентриситета осуществляется фиксирование клина 8 путем затягивания стопорных болтов 9.
Того же результата можно добиться, изменяя величину угла α наклона направляющей 5 к горизонту.
Только комбинированное изменение этих двух факторов (величины эксцентриситета и величины угла α) дает возможность расширения диапазона измерений в широких пределах. Действительно, знаменатель первого слагаемого правой части вышеприведенной формулы должен быть обязательно положительным. И этого, изменяя значения величин угла α и эксцентриситета е, можно добиться при практически любых значениях остальных компонентов этой формулы.
Гибкая несущая связь 6 за счет закрепления одним концом на ступени 4 барабана, а другим в верхней части наклонной направляющей 5 навивается на ступень 4, совершенно исключая возможность проскальзывания барабана по отношению к направляющей 5. Навивка гибкой несущей связи 6 таким образом обеспечивает точность взаимного положения элементов устройства, что повышает точность его работы в целом.
В устройстве гибкая несущая связь 6 и гибкая тяговая связь 2 представляют собою ленты (например, стальные), навиваемые соответственно на ступени 4 и 1 барабана в противоположных направлениях по методу бобины.
| название | год | авторы | номер документа |
|---|---|---|---|
| Весоизмерительное устройство | 1987 |
|
SU1446484A1 |
| Устройство для перемещения грузов | 1986 |
|
SU1507683A1 |
| Устройство для гравитационного перемещения грузов | 1986 |
|
SU1393717A1 |
| VIP-ЛЕБЕДКА ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗА | 2011 |
|
RU2478558C1 |
| Устройство для развлечений | 1989 |
|
SU1662592A1 |
| Устройство для предварительного напряжения железобетонных резервуаров | 1983 |
|
SU1087637A2 |
| Устройство весового автоматического дозирования | 1985 |
|
SU1476320A1 |
| ВЗВЕШИВАЮЩАЯ СЕКЦИЯ ДЛЯ КОНВЕЙЕРОВ С ХОДОВЫМИ РОЛИКАМИ | 2005 |
|
RU2293292C1 |
| Стенд для испытания одноколейных транспортных средств | 1989 |
|
SU1672264A1 |
| Весовое устройство | 1990 |
|
SU1779947A1 |
Использование: устройство относится к области взвешивания грузов и направлено на повышение точности измерений, расширение диапазона и упрощение конструкции. Сущность изобретения: ступенчатое тело качения в виде барабана с гибкой тяговой связью 2, связанной с весовым бункером 3, установлено на наклонной направляющей 5, в верхней точке которой закреплена гибкая несущая связь 6 барабана, ступени которого выполнены с эксцентриситетом друг относительно друга. После нагружения бункера измеряют расстояние, на которое переместится барабан вверх по направляющей по отношению к ненагруженному положению, что и характеризует вес взвешиваемого тела. 1 з.п. ф-лы, 3 ил.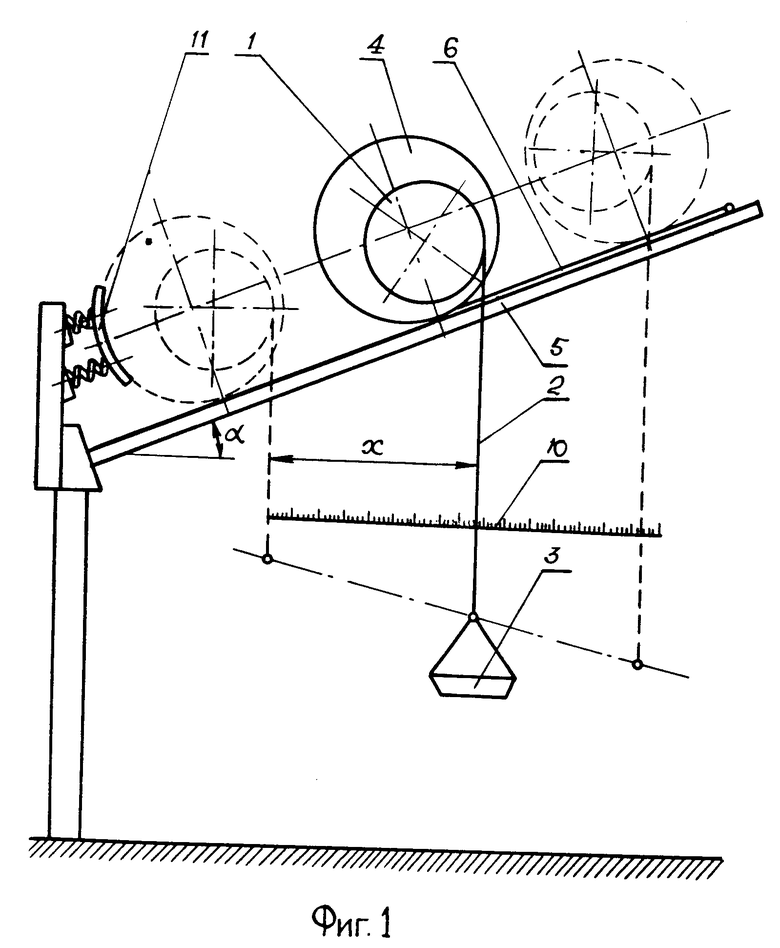
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Весоизмерительное устройство | 1987 |
|
SU1446484A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
