енно n р и
увеличение зоны
Изобретение относится к подъегл но-транспортному оборудованию, низмам, перемещающим силы тяжести груза.
Цель изобретения - обслуживания.
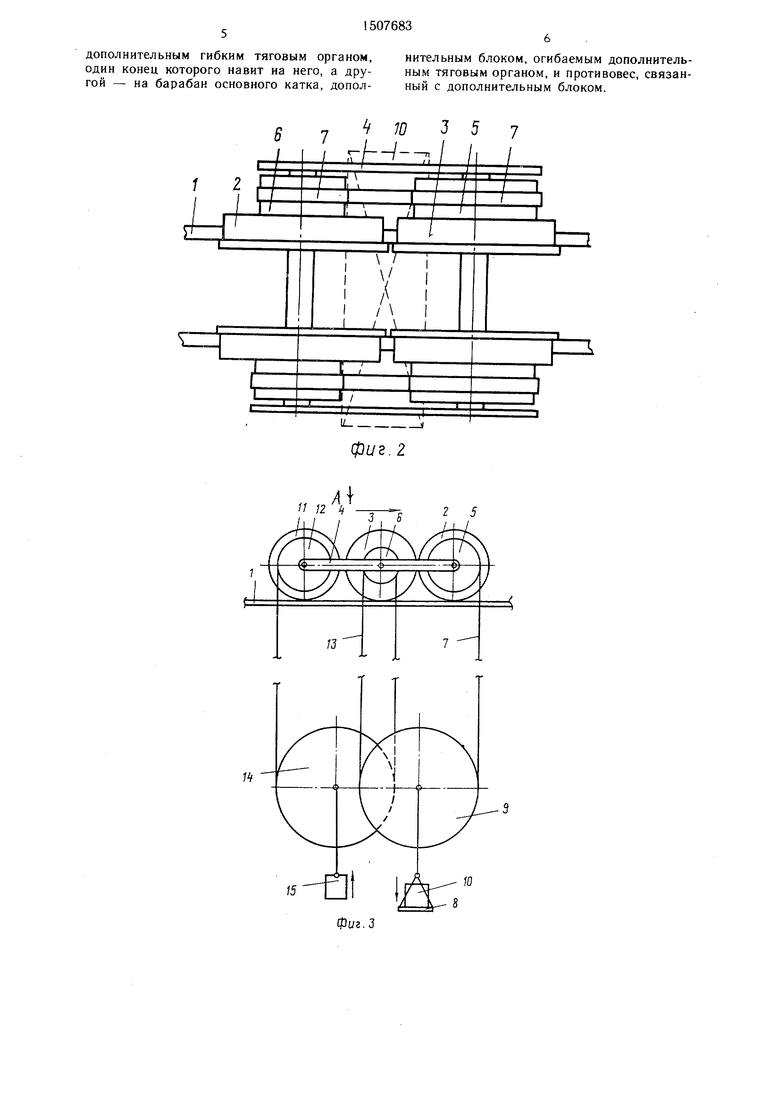
На фиг. 1 изображена принципиальная схема предлагаемого устройства, вид сбоку; на фиг. 2 - то же, вид сверху; на фиг. 3 - схема устройства с противо- есом, вид сбоку; на фиг. 4 - вид по стрелке Д. на фиг. 3.
Устройство включает в себя жестко закрепленные направляющие 1. на которых с возможностью качения по икм расположены основной каток 2 к дополнительный каток 3, которые связаны Г лежду собой с возможностью совместного качения, для чего их оси жестко связаны нежду собой тягой 4. Катки 2 и 3 имеют 6apa6aiib; 5 и 6, которые соединены собой гибким органог-л У с возможностью навивки и свнвкя. причем барабаны имеют разные радиусы, например величина радиуса барабана 5 превышает величину радиуса барабана 6 в 3,1 раза Барабаны 5 и 6 выполнены: в виде ст/пеяей на катках 2 и 3, т. е. поверхности качения и навивки жестко связаны друг с другом и имеют возможность совместного вращения. Устройство также содержит грузонесущую платформу 8 для размещения груза 10, которая соединена с гибким тягсзым органом 7 с возможностью перемещения ле нему (вдоль гибкого тягового элемента). Гибкий тяговый орган 7 охватывает блок 9. Устройство может быть снабжено для обеспечения холостого хода вторь;и доком 11 (фиг. 4), ииг;оп,;:, торый связан с каткаык 2 ; совместного качения, пр;- и 5 второго допол1;ительк седнего с ним катк 3 с:; ностью навивки на к;-;: дО)/ кого тягового органа 13, Н5 лен дополнительный блок тивовес 15.
Для обеспечения обратного хода за счет силы тяжести катков направляющие i нэ- клонены под углом р (фиг. 3) к го)мзонту с возвышением в сторону рабочего хода.
Устройство работает следующие образом.
При размещении груза tO на платформе 8 их общая сила тяжести одновременно воздействует на обе ветви гибкого тягового элемента 7. Поскольку эти ветви навиты на барабаны 5 и 6, имеющие различные радиусы, то и моменты, приложенные к телам (и я 3) качения различны. При этом, так- как (фиг. 1), то опускающийся груз 10 своей силой тяжести вызывает горизонтальное перемещение груза вправо. При совершении обратного хода освобох дения от груза 10 платформа 8 поднимается, повторяя траекторию, по которой при рабочем ходе переме- .щался груз, но в обратном направлении.
(:лн11те.мьи:.о Г:;-.;1 котором у-:та;:-:;п14, несущий про5
5
i- г.бочий ход может осуществляться на том же принципе. Но при этом за счет введения второго допо.лнительиого катка 11, связанного с возможностью совместного вращения с барабаном 12, который соединен с барабаном 6 с возможностью навивки и свивки гибкого тягового органа, происходит (при ) подъем оси блока 14, а следовательно, и противовеса 15. В конце ра бочего хода противовес 15 крайнее верхнее положение.
Когда платформа 8 освобождена от груза 10, ка ветзи основного гибкого тягового органа 7 воздействует только сила тяжести платформы В. Если воздействие силы тяжести противовеса 15 преобладает над воздействием силы тяжести платформы 8, то автоматический возврат в неходкое положение обеспечен.
При осущ,ествлении обратного хода противовес 1с из пассивной детали превращается 3 ахтивкую. Сила тяжести противовеса, разделенная приблизительно поровну между левой и правой (фиг. 4) ветвями дополни- : ельг:ого п-гбкого тягового элемента 13, создает момент, приложенный к катку 11, боль- пий, чем момент, приложенный к катку 3. Это происходит за счет того, что . Все JTO создает возможность перемещения влево., т. е осупдествляется обратный ход. Противовес 15 при этогч опускается, платформа 8 иодн и мается, и вся система возвращается в исход;1ое положение к пункту погрузки, перемещаясь влево (фиг. 4).
Формула изобретения
0
0 т
,H,; с возл.окьость:;; г озврата в исходное . ;оложеи; . каток с б рабамом, гибкий тяговый орган, навитый одним концом на бан, и связанную с гибким органом грузо- несущ.ую платформу, отличающееся тем, что, с цель.ю увеличения зоны обслуживания, оно- снабжено дополнительным катком с бараба- иокс, имеющим диаметр, больщий диаметра барабана основного катка, размещенным на направляющих перед основным катком по направ. 1ению перемещения груза, тягой для жесткой связи дополнительного катка с основным, блоком, огибаемым гибким тяговым органом, к которому гюдвещена гру- зонесущая платформа, причем д,ругой конец тягового органа навит на барабан дополнительного катка.
2.Устройство по п. 1, отличающееся тем, что направляющие установлены с наклоном в сторону, противоположную направлению перемещения груза.
3.Устройство по п. 1, отличающееся гкы, ч го оно снаб.:ено вторыГ Л дополнительным катком, аналогичным перво му, размещен- Hbuvi но другую сторону от основного катка.
1507683 56
дополнительным гибким тяговым органом, нительным блоком, огибаемым дополнитель- один конец которого навит на него, а дру- ным тяговым органом, и противовес, связан- гой - на барабан основного катка, допол- ный с дополнительным блоком.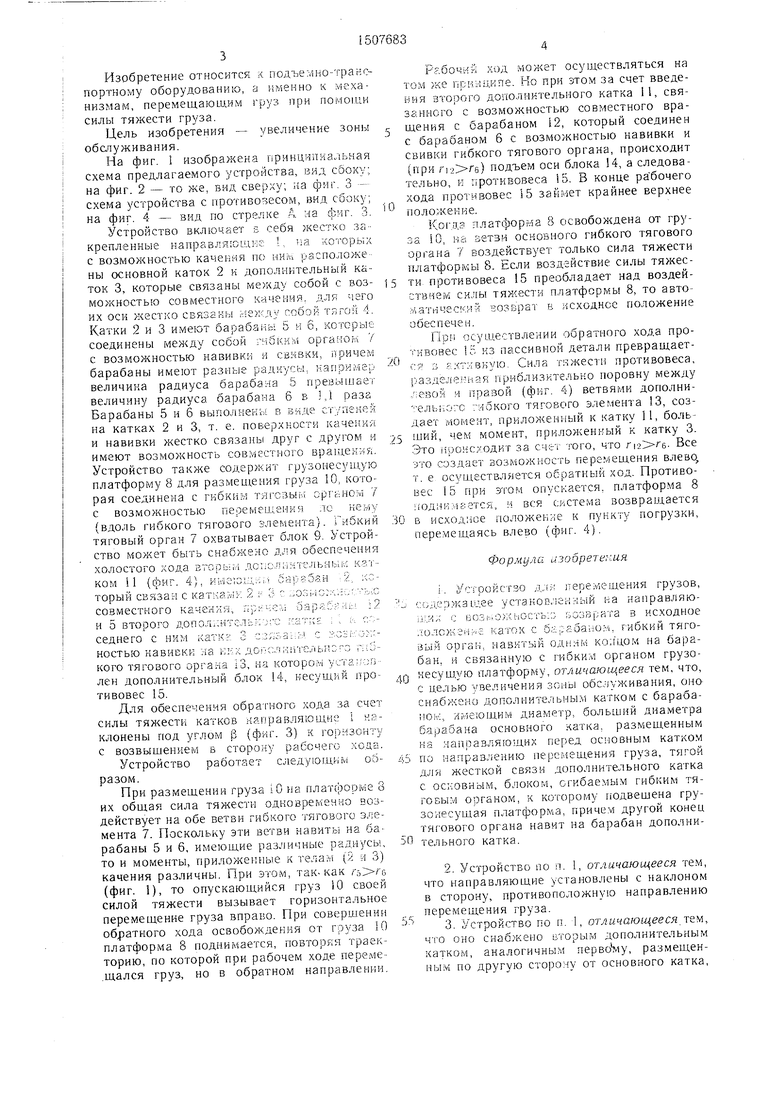
| название | год | авторы | номер документа |
|---|---|---|---|
| САМООЧИЩАЮЩИЙСЯ КРУТОНАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2005 |
|
RU2279393C1 |
| Ленточный конвейер | 1986 |
|
SU1382777A1 |
| ЭКСКАВАТОР ДЛЯ ПЛАНИРОВАНИЯ И ЗАСЕВА ОТКОСОВ ОТВАЛА | 1992 |
|
RU2024692C1 |
| ЛИФТ С НЕСКОЛЬКИМИ ПРИВОДНЫМИ ЛЕНТОЧНЫМИ БАРАБАНАМИ БЕЗ ПРОТИВОВЕСА И НИЖНИМ РАСПОЛОЖЕНИЕМ ПРИВОДА | 2000 |
|
RU2171218C1 |
| Пробежная машина для испытания гибкой тяги | 1984 |
|
SU1185157A1 |
| Устройство для передачи пачки длинномерных изделий от транспортного средства к питателю | 1989 |
|
SU1684198A1 |
| Подъемный механизм | 1989 |
|
SU1684217A1 |
| Подъемно-опускное устройство | 1980 |
|
SU1044592A1 |
| Ленточно-тележечный конвейер | 1975 |
|
SU602429A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО, ПРЕОБРАЗУЕМОЕ С САННОГО ХОДА НА КОЛЕСНЫЙ | 2010 |
|
RU2423270C1 |

Изобретение относится к подъемно-транспортному оборудованию, а именно к механизмам, перемещающим груз за счет его силы тяжести. Цель изобретения - увеличение зоны обслуживания. Изобретение позволяет снизить металлоемкость и упростить конструкцию устройства. Устройство состоит из жестко установленных горизонтальных направляющих 1, на которые с возможностью качения установлены катки 2 и 3, оси которых жестко связаны между собой. На валах тел качения установлены барабаны 5 и 6, соединенные гибким тяговым органом 7 с возможностью навивки на них. Тяговый орган 7 охватывает блок 9, к которому подвешена платформа 8 для размещения груза 10. Под действием силы тяжести груза 10 и платформы 8 возникают моменты от сил натяжения ветвей гибкого тягового органа, приложенные к каткам 2 и 3. При этом за счет того, что радиус с барабана 5 больше радиуса барабана 6, момент, приложенный к катку 2, будет больше момента, приложенного к катку 3. Это создает возможность перемещения установки вместе с грузом под действием силы его тяжести. 2 з.п.ф-лы, 5 ил.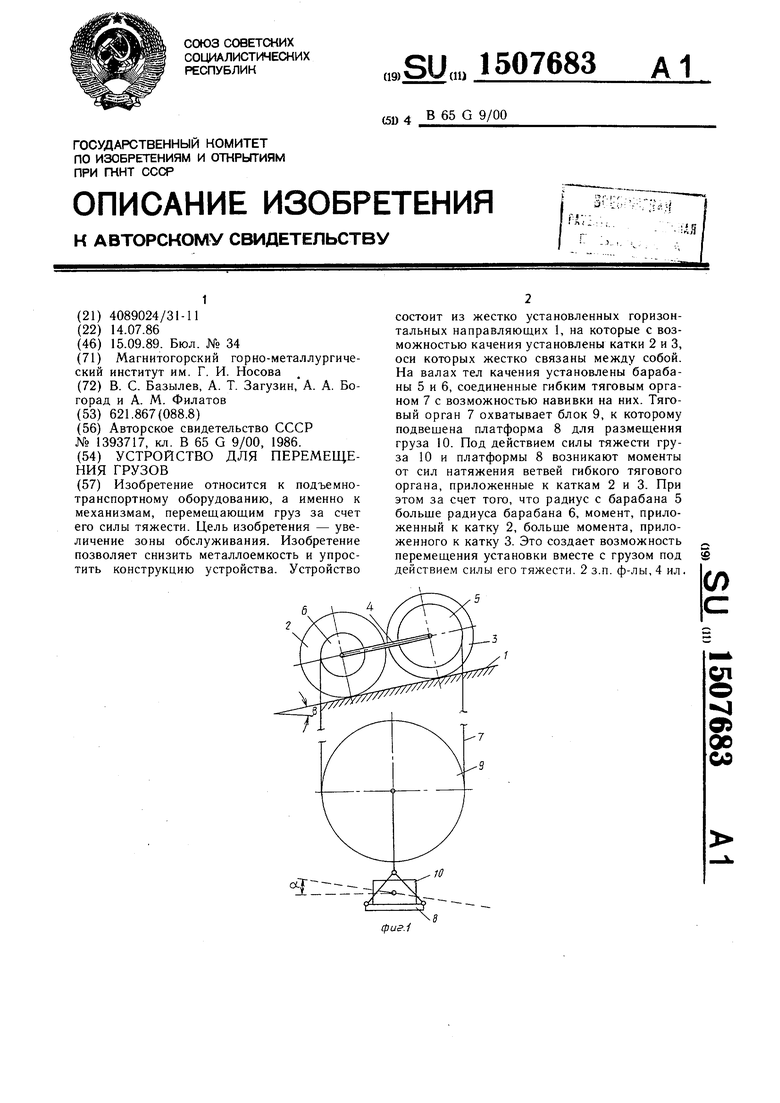
/5
i Ю 35 7
фиг. 2
В ид А
if 3 S
3 фиг. 7
7 2 5
| Устройство для гравитационного перемещения грузов | 1986 |
|
SU1393717A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
