Изобретение относится к медицине, более точно касается офтальмологического хирургического инструмента, и может быть использовано в офтальмологических клиниках и отделениях для хирургической коррекции миопии и миопического астигматизма.
Известен офтальмологический хирургический инструмент кератотомический нож, содержащий цилиндрический корпус, на одном открытом торце которого имеется упор со сквозным пазом, шток, установленный в корпусе с возможностью возвратно-поступательного перемещения вдоль оси корпуса, режущий инструмент закреплен на конце штока и выступающий при перемещении штока через сквозной паз за пределы наружной поверхности упора, а также микрометрический винт, взаимодействующий с подпружиненным хвостовиком штока. Перед началом операции вращением микрометрического винта выдвигают лезвие на заданную величину относительно наружной поверхности упора, что соответствует глубине надреза. После чего осуществляют необходимые надрезы, причем для каждого надреза выдвигают на нужную величину лезвие, затем устанавливают инструмент в исходное положение и производят надрез [1]
Проведение операции с использованием известного инструмента сопровождается большой длительностью операционного цикла и зависимостью качества выполнения надреза от квалификации хирурга и других субъективных факторов.
Известен также офтальмологический хирургический инструмент, содержащий корпус с открытым торцом, на котором закреплен упор, приспособленный для взаимодействия своей наружной поверхностью с роговицей глаза, шток, установленный в корпусе с возможностью возвратно-поступательного перемещения вдоль оси корпуса, несущий на своем конце со стороны открытого торца режущий инструмент. Упор выполнен в виде подпружиненного съемного кулачка, установленного с возможностью вращения в плоскости, параллельной плоскости резания. Профиль кулачка точно повторяет профиль необходимого надреза для данного пациента. Для выполнения надреза устанавливают кулачок с необходимым профилем поверхности. Вращением микрометрического винта выдвигают лезвие в положение начальной глубины надреза, опускают инструмент до взаимодействия боковой поверхности кулачка с поверхностью роговицы глаза и производят надрез, перемещая инструмент вдоль всей длины линии надреза. При этом профиль надреза определяется профилем боковой поверхности кулачка, поворачивающегося при перемещении инструмента.
Этот инструмент позволяет выполнить весь надрез в один прием без извлечения лезвия инструмента из операционного поля. Однако здесь, как и в предыдущем случае, точность операции во многом зависит от субъективных факторов, в том числе и от квалификации хирурга. Кроме того, известный инструмент требует индивидуального подбора профиля и изготовления кулачка для каждого пациента, что является трудоемкой задачей.
Технический результат, который достигается при использовании офтальмологического хирургического инструмента, заключается в исключении влияния субъективных факторов на качество проведения операции и в осуществлении автоматического режима в зависимости от индивидуальных параметров глаза пациента.
Этот результат достигается за счет того, что в офтальмологическом хирургическом инструменте, содержащем корпус с по меньшей мере одним открытым торцом, на котором закреплен упор, приспособленный для взаимодействия своей наружной поверхностью с поверхностью роговицы глаза, шток с держателем режущего инструмента на конце со стороны открытого торца корпуса, установленный внутри корпуса в направляющей с возможностью возвратно-поступательного перемещения вдоль продольной оси корпуса посредством привода продольного перемещения штока, согласно изобретению, направляющая для продольного перемещения штока подпружинена относительно стенок корпуса и установлена с возможностью качания вокруг оси, поперечной продольной оси корпуса посредством привода поперечного перемещения штока, инструмент снабжен системой автоматического управления перемещением штока, включающей в себя датчик поперечного перемещения штока, связанный через цепь управления поперечным перемещением с приводом поперечного перемещения, задатчик поперечного перемещения, связанный с цепью управления поперечным перемещением, датчик продольного перемещения штока, связанный через цепь управления продольным перемещением с приводом продольного перемещения, задатчик продольного перемещения, связанный с цепью управления продольным перемещением, блок управления, связанный с цепями управления продольным и поперечным перемещениями, и задатчик продольного перемещения в зависимости от поперечного перемещения, связанный с датчиком поперечного перемещения и цепью управления продольным перемещением.
Офтальмологический хирургический инструмент позволяет выполнять надрез в автоматическом режиме, предварительно запрограммировав параметры надреза, причем в процессе проведения операции не требуется вмешательства хирурга. Это исключает влияние на качество операции квалификации и психологического состояния хирурга. Автоматизация выполнения надреза позволяет повысить повторяемость результатов операций, что обеспечивает стабильность этих результатов и возможность повышения точности коррекции. Перенастройка инструмента осуществляется в соответствии с индивидуальными особенностями пациента без замены каких-либо узлов инструмента.
Для упрощения конструкции в качестве привода поперечного перемещения используют магнитоэлектрический двигатель, ротор которого жестко соединен с направляющей штока, а статор установлен на корпусе.
Целесообразно шток инструмента подпружинить относительно направляющей его в продольном направлении. Это позволяет избежать выдвижения штока с режущим инструментом за пределы наружной поверхности корпуса при аварийном падении напряжения в цепях управления перемещением режущего инструмента.
Для обеспечения автоматической работы инструмента в него введено устройство для определения момента касания лезвием поверхности роговицы глаза, связанное с блоком управления.
Для обеспечения управления процессом резания с момента касания лезвия поверхности роговицы глаза устройство для определения момента касания соединено с блоком управления и с каналом управления продольным перемещением штока.
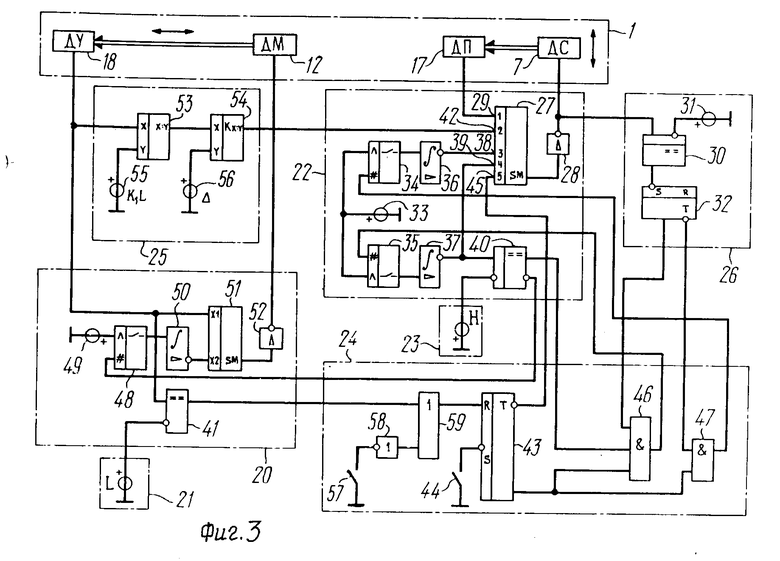
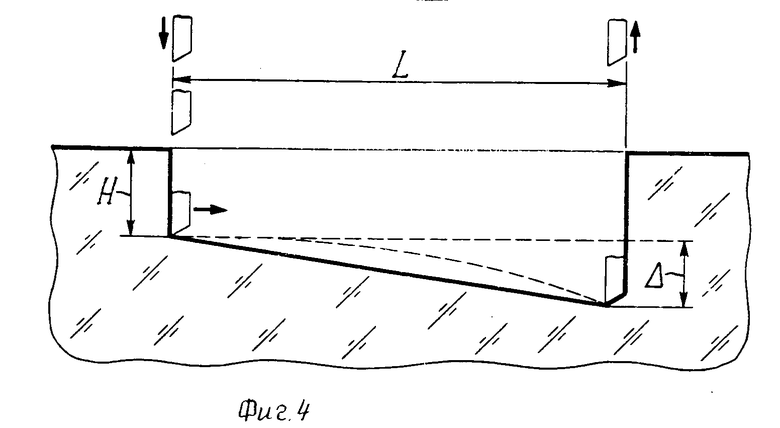
На фиг. 1 изображен продольный разрез офтальмологического хирургического инструмента; на фиг. 2 разрез по А-А на фиг. 1; на фиг. 3 структурная схема офтальмологического хирургического инструмента с системой автоматического управления перемещением штока; на фиг. 4 схематический профиль надреза на роговице глаза.
Офтальмологический хирургический инструмент содержит корпус 1, на открытом торце которого закреплен упор 2, наружная поверхность которого приспособлена для взаимодействия с поверхностью роговицы глаза, шток 3 с держателем режущего инструмента, установленный внутри корпуса 1 в направляющей 4 для продольного возвратно-поступательного перемещения, на конце штока 3 в держателе со стороны открытого торца корпуса 1 установлен в держателе (на фиг. не показан) режущий инструмент лезвие 5, которое при продольных перемещениях штока 3 выступает через прорезь в упоре 2 за пределы поверхности упора 2. Шток 3 связан с направляющей 4 посредством опор 6 скольжения и может легко перемещаться вдоль нее возвратно-поступательно при сообщении ему усилия от подвижного элемента 7 привода продольного перемещения штока. В данном случае в качестве привода использован электромеханический двигатель, подвижный элемент 7 которого установлен на штоке 3.
Для осуществления поперечного перемещения штока 3 его направляющая 4 установлена в корпусе 1 с возможностью качания относительно корпуса. Для этого на стенках корпуса 1 расположены опоры 8 вращения, на которых установлена направляющая 4 так, что она совершает качание относительно оси 9 поперечной продольной оси корпуса 1. Привод 11 поперечного перемещения штока 3 образован магнитоэлектрическим двигателем, статор 12 которого установлен на детали 13 корпуса 1 в таком положении, что направление перемещения его ротора 14 перпендикулярно оси корпуса 1. При этом ротор 14 взаимодействует с направляющей 4, которая снабжена упругим элементом 15, в данном случае плоской пружиной, размещенной между внутренней поверхностью стенки корпуса 1 и обращенной к ней поверхностью направляющей 4, на противолежащей относительно упругого элемента 15 внутренней поверхности стен корпуса 1 размещен упор 16, взаимодействующий с направляющей 4. Жесткость упругого элемента 15 подобрана таким образом, что, когда направляющая 4 находится в исходном положении и статор 12 обесточен, его ротор 14 своим концом касается поверхности направляющей 4.
Кроме того, инструмент оснащен датчиком 17 продольного перемещения штока 3 относительно направляющей 4 и датчиком 18 (в данном случае датчиком углового положения) поперечного перемещения штока 3 относительно корпуса 1. В качестве датчиков 17, 18 могут быть использованы любые известные конструкции, например, электромеханические датчики. Ротор датчика 17 закреплен на штоке 3, а статор на направляющей 4 (не показан). Ротор датчика 18 закреплен на направляющей 4, а статор на детали 13 корпуса 1. Между датчиком 17 и внутренней стенкой направляющей 4 установлена пружина 19 сжатия, которая обеспечивает безопасность инструмента, так как удерживает шток 3 от выдвижения при транспортировке и при аварийном падении напряжения в каналах управления штоком.
Офтальмологический хирургический инструмент оснащен также системой автоматического управления перемещением штока, структурная схема которой представлена на фиг. 3. Система автоматического управления включает в себя датчик 18 поперечного перемещения штока, связанный через цепь 20 управления поперечным перемещением с приводом 12 поперечного перемещения, а задатчик 21 поперечного перемещения связан с цепью 20 управления поперечным перемещением. Датчик 17 продольного перемещения штока связан через цепь 22 управления продольным перемещением с приводом 7 продольного перемещения. Задатчик 23 продольного перемещения связан с цепью 22 управления продольным перемещением. Блок 24 управления связан с цепями 20 и 22 управления продольным и поперечным перемещениями. Задатчик 25 продольного перемещения в зависимости от поперечного перемещения связан с датчиком 18 поперечного перемещения и цепь 22 управления продольным перемещением штока 3. Устройство 26 определения касания поверхности роговицы глаза связано с цепью 22 управления продольным перемещением штока 3 и блоком 24 управления.
Далее приведем функциональную схему системы автоматического управления перемещением штока, также изображенной на фиг. 3, по которой объясняется работа инструмента.
Цепь 22 управления продольным перемещением содержит сумматор 27 и последовательно с ним соединенные усилитель 28, выход которого является выходом цепи 22. Выход датчика 17 соединен со входом 29 сумматора 27. Выход усилителя 28 соединен с прямым входом компаратора 30 устройства 26, к инверсному входу которого присоединен источник 31 фиксированного опорного напряжения, а к выходу вход триггера 32. Источник 33 фиксированного опорного напряжения через аналоговые входы коммутаторов 34 и 35 соединен соответственно с входами интеграторов 36 и 37. Выходы этих интеграторов 36, 37 присоединены к входам 38, 39 сумматора 27 соответственно. Выход интегратора 37 соединен также с прямым входом компаратора 40, инверсный вход которого соединен с задатчиком 23 величины продольного перемещения штока 3, который представляет собой источник регулируемого опорного напряжения. Выход датчика 18 поперечного перемещения соединен с входом задатчика 25 величины поперечного перемещения в зависимости от величины продольного перемещения и входом компаратора 41 цепи 20 управления поперечного перемещения. Выход задатчика 25 соединен с входом 42 сумматора 27. Инверсный вход компаратора 41 соединен с задатчиком 21 величины поперечного перемещения штока 3, который также представляет собой источник регулируемого опорного напряжения. Блок 24 управления включает в себя триггер 43, который своим входом соединен с педальным выключателем 44, а его инверсный выход присоединен к входу 45 сумматора 27. Входы схемы 46 совпадения соединены с прямыми выходами триггеров 32 и 43 и прямым выходом компаратора 40, а входы схемы 47 совпадения с инверсным выходом триггера 32 и прямым выходом триггера 43, выходы схем совпадения 46 и 47 соединены с цифровыми входами коммутаторов 35 и 34 соответственно. Инверсный выход компаратора 40 соединен с цифровым входом коммутатора 48 цепи 20 управления, при этом аналоговый вход коммутатора 48 соединен с источником 49 фиксированного опорного напряжения, а выход со входом интегратора 50. Выход интегратора 50 соединен с одним из входов сумматора 51, второй вход которого соединен с выходом датчика 18 поперечного перемещения, а выход через усилитель 52 с обмоткой статора 12 привода 11 поперечного перемещения штока 3.
Для выполнения профиля надреза, близкого к линейному, задатчик 25 выполнен в виде последовательно соединенных блока 53 деления и блока 54 умножения. Выход блока 53 деления соединен с одним из входов множителя Х блока 54. К входу Y делителя и к второму входу множителя блока 54 присоединены по одному два дополнительных регулируемых источника 55, 56 опорного напряжения соответственно. Вход делимого Х блока 53 деления является входом задатчика 25, а выход блока 54 умножения его выходом. Цепи установки интеграторов 36, 37 и 50, а также триггеров 32 и 43 в нулевое исходное положение условно не показаны.
Для обеспечения экстренного (аварийного) вывода лезвия 5 из операционного поля блок управления 24 снабжен педальной кнопкой 57 аварийного выброса, при нажатии которой сигнал проходит через элемент НЕ 58 и элемент ИЛИ 59 на вход Р триггера 43. Элемент ИЛИ 59 также связан с выходом компаратора 41. Сигнал, поступающий на вход Р триггера 43, является управляющим сигналом, поступающим на привод продольного перемещения штока 3, и лезвие 5 выводится из операционного поля.
Офтальмологический хирургический инструмент используют следующим образом.
Работа инструмента основана на принципе следящего привода штока 3 с компенсационным контуром отрицательной обратной связи. Контур обратной связи включает в себя датчик 17, сумматор 27 по его входу 29, усилитель 28 и вход привода 7. При этом при нулевых сигналах на входах 42, 45, 38, 39 шток 3 удерживается в положении, при котором напряжение на выходе датчика 17 близко к нулю. При использовании усилителя 28 с большим коэффициентом усиления ошибка в воспроизведении требуемых перемещений при реально действующих на шток 3 усилиях может быть сведена к достаточно малой величине (порядка единиц микрометров).
При подаче на любой из входов 42, 45, 38, 39 сумматора 27 напряжения шток 3 в установившемся состоянии занимает такое положение с малой погрешностью, что напряжение с выхода датчика 17 равно и противоположно по знаку напряжению, поданному на входы 42, 45, 38, 39 сумматора 27. Таким образом подачей напряжений на эти входы сумматора достигается регламентированное этими напряжениями перемещение штока 3 вдоль его оси.
Другим свойством компенсационного контура обратной связи является соответствие напряжения (или тока) на входе привода 7 усилию, развиваемому его подвижным элементом. Конструктивно опоры 6 выполняются с малым значением силы трения, поэтому с учетом постоянства силы тяжести изменения напряжения (тока) на входе датчика 17 характеризуют изменение силы резания.
С учетом изложенного выше принципа работы следящего привода работа устройства происходит следующим образом.
Перед проведением операции триггеры 32, 53 (фиг. 3), а также интеграторы 36 и 37 устанавливаются в нулевое положение. Шток 3 (фиг. 1) в исходном состоянии удерживается в крайнем левом положении контуром обратной связи и пружиной 19. Напряжение задатчика 21 (фиг. 3) устанавливают соответствующим длине надреза, а напряжение задатчика 23 в соответствии с заданной начальной глубиной Н надреза. Профиль надреза определяется задатчиком 25 величины поперечного перемещения в зависимости от величины продольного перемещения. При необходимости выполнения линейного профиля надреза устанавливают напряжение источника 55 пропорционально длине L надреза, а напряжение источника 56 в соответствии с перепадом Δ глубины надреза.
Офтальмологический хирургический инструмент, подготовленный к операции, прижимают к поверхности операционного поля глаза упором 2 (фиг. 1) в соответствии с разметкой, причем паз упора 2 устанавливают вдоль линии надреза, а лезвие 5 над начальной точкой надреза. Хирург педалью замыкает выключатель 44 (фиг. 3), при этом триггер 43 переводится в состояние "1" и с помощью схемы 47 совпадения через коммутатор 34, источник 33 опорного напряжения подключается к входу интегратора 36.
При подаче постоянного напряжения на вход интегратора 36 его выходное напряжение начинает линейно изменяться от нуля. Поступая на вход 38 сумматора 27, это линейно изменяющееся напряжение, как указывалось выше, будет вызывать продольное перемещение штока 3 в направлении к поверхности оперируемого глаза. Скорость перемещения штока 3 определяется величиной напряжения источника 33 и постоянной времени интегратора 36 (величина этой скорости несущественна и определяется удобством проведения операции). Поскольку при этом перемещении штока 3 сила Fc сопротивления резания равна нулю, напряжение на выходе усилителя 28 определяется только силой тяжести и превышает напряжение источника 31, поэтому на выходе компаратора 30 напряжение соответствует "1", а триггер 32 находится в состоянии "0".
При достижении режущим инструментом лезвием 5 поверхности роговицы глаза возникает сила Fc сопротивления резания, направленная в противоположном силе Fт тяжести направлении. Общее усилие, компенсируемое датчиком силы, уменьшается, при этом и напряжение на выходе усилителя 28 ниже уровня напряжения источника 31. Это приведет к переходу компаратора 30 в нулевое состояние, а триггера 32 в состояние "1". Схема 47 совпадения через коммутатор 34 отключит вход интегратора 36 от источника 33 опорного напряжения, а схема 46 совпадения через коммутатор 35 подключит источник 33 к входу интегратора 37. Таким образом фиксируется начальное положение надреза.
Дальнейшее продвижение режущего инструмента лезвия 5 осуществляется вглубь роговицы, движение это обеспечивается линейным изменением напряжения на выходе интегратора 37 при постоянном уровне напряжения на выходе интегратора 36. Углубление лезвия 5 продолжается до достижения напряжением на выходе интегратора 37 уровня напряжения задатчика 21, величина которого установлена в соответствии с заданной величиной Н начального углубления. При превышении этой величины компаратор 40 переходит в состояние "0" по прямому выходу и через схему 46 совпадения отключает источник 33 от интегратора 37 с помощью коммутатора 35. Уровень напряжения на интеграторе 37 в последующем сохраняется постоянным.
Срабатыванием компаратора 40 подается сигнал на цепь 20 управления приводом поперечного перемещения, работа которого основана на принципе следящего привода с компенсационным контуром обратной связи. Контур обратной связи включает в себя датчик 18, сумматор 51, усилитель 52 и вход привода 11.
Таким образом, срабатывание компаратора 40 обеспечивает подачу напряжения от источника напряжения 49 через коммутатор 48 на интегратор 50. Его выходное напряжение начинает при этом изменяться, причем скорость этого изменения зависит от значения напряжения источника 49 и постоянной времени интегратора 50. Напряжение с интегратора 50 сравнивается в сумматоре 51 с сигналом датчика 18 поперечного перемещения и через усилитель 52 поступает на статор 12. Величина сигнала определяет поперечное перемещение направляющей 4 в опорах 8 вместе со штоком 3 и лезвием 5. Плоская пружина 14 обеспечивает возврат направляющей 4 в исходное положение.
В дальнейшем изменение глубины Н резания роговицы осуществляется в зависимости от поперечного перемещения режущего инструмента, измеряемого датчиком 17, чем обеспечивается формирование требуемого профиля надреза. Профиль надреза определяется задатчиком 25, выходное напряжение которого, формирующее глубину резания по входу 42 сумматора 27, определяется величиной поперечного перемещения режущего инструмента, поступающей на вход задатчика 25.
Например, при выполнении надреза, профиль которого близок к линейному, линейное изменение глубины резания, характеризуемое крутизной наклона нижней границы надреза, эта крутизна задается с помощью блока 53 деления и блока 54 умножения, реализующих математическое выражение
δ  · Δ
· Δ
где δ- текущее значение глубины надреза;
L текущее значение поперечного перемещения режущего инструмента;
Δ- заданное значение перепада глубины резания;
КLL параметр, пропорциональный заданной длине надреза.
Величины КLL и Δ задаются в предоперационной подготовке устройства, соответствуют установке напряжений источников 55 и 56.
По достижении требуемой длины L надреза напряжение на выходе датчика 18 превысит установленное для этой длины напряжение на задатчике 21, что приведет к переходу компаратора 41 в состояние "1", напряжение с этого компаратора поступает через вход элемента ИЛИ 59 на триггер 43. Это воздействие на перемещение штока 3 превышает воздействие от интеграторов 36 и 37, поэтому после срабатывания компаратора 41 шток 3 с режущим инструментом выводится из операционного поля до упора в исходное положение. На этом завершается выполнение коррегирующего программируемого разреза роговицы глаза заглубления.
Для предотвращения не управляемого вдвижения штока 3 с лезвием 5 внутри направляющей 4 установлена пружина 19. Жесткость пружины 15 рассчитана таким образом, что компенсируют вес штока 3 и лезвия 5. Пружина 19 удерживает шток 3 с лезвием 5 при аварийном отключении напряжения в системе управления.
Офтальмологический хирургический инструмент не требует перенастройки в процессе выполнения надреза и сводит время надреза к минимально возможной величине, а также обеспечивает объективный контроль за качеством как в процессе операции, так и после ее завершения. Такой контроль полезен для анализа результатов операций в исследовательских целях. Автоматизация и объективный контроль за ходом операции исключают случаи травматизма при ее проведении.
При существенном снижении психофизических нагрузок при проведении операции как для врача, так и для пациента устройство позволяет сократить время проведения операции.
Нами был описан предпочтительный вариант осуществления устройства, в который могут быть внесены изменения, не выходящие, однако, за пределы существа настоящего изобретения, а именно приведенная функциональная схема может быть выполнена как в аналоговой, так и цифровой форме, а устройство определения момента касания лезвием поверхности роговицы глаза может быть построено на иных, например, оптико-электронных элементах по известным принципам.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОФТАЛЬМОЛОГИЧЕСКИХ ОПЕРАЦИЙ | 1994 |
|
RU2068677C1 |
| СПОСОБ ЛЕЧЕНИЯ БЛИЗОРУКОСТИ И АСТИГМАТИЗМА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2010558C1 |
| УСТРОЙСТВО ДЛЯ ОФТАЛЬМОЛОГИЧЕСКИХ ОПЕРАЦИЙ | 1997 |
|
RU2170563C2 |
| Устройство для нанесения надрезов на роговицу глаза | 1979 |
|
SU959779A1 |
| Устройство для офтальмологических операций | 1983 |
|
SU1271511A1 |
| Устройство для нанесения надрезов на роговицу глаза | 1984 |
|
SU1331503A1 |
| Устройство для офтальмологических операций | 1985 |
|
SU1554909A1 |
| Устройство для измерения усилий резания глазных тканей | 1984 |
|
SU1337045A1 |
| Устройство для копирования | 1987 |
|
SU1444132A1 |
| Устройство для управления скоростью перемещения магнитной ленты | 1983 |
|
SU1137521A1 |

Использование: изобретение относится к медицине, и может быть использовано в офтальмологических клиниках и отделениях для хирургической коррекции миопии и миопического астигматизма. Сущность изобретения: инструмент содержит корпус 1 с упором 2, приспособленным для взаимодействия своей наружной поверхностью с поверхностью роговицы глаза, шток 3 - с держателем режущего инструмента 5. Шток 3 установлен в направляющей 4 с возможностью возвратно-поступательного перемещения, а направляющая 4 установлена в корпусе 1 с возможностью качания относительно продольной оси корпуса. Инструмент снабжен датчиками 17 и 18, задатчиками, задающими параметры надреза. Задатчики связаны с датчиками и приводами через цепи управления. 4 з.п. ф-лы, 4 ил.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для офтальмологических операций | 1983 |
|
SU1271511A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
