Изобретение относится к технике магнитной записи, а именно к устрой,ствам управления скоростью перемещения магнитной ленты.
Известно устройство для управле- 5 НИН скоростью перемещения магнитной ленты, содержащее датчик скорости вращения ротора электродвигателя, подключенный через усидитель и блок . сравнения с уйилителем мощности, 10 подсоединенным к электродвигателю, ротор которого кинематически соединен с входом датчика скорости и через редуктор - с ведущим валом, осуществляющим перемещение магнитной 15 ленТы, при этом другой вход блока сравнения подключен к генератору. опорного сигнала QJ .
Недостатком данного устройства является наличие относительно боль- 20 ших колебаний линейной скорости перемещения магнитной ленты, вызванных отсутствием контура управления приводного двигателя по информации от измерителя линейной скорости пе- 25 ремеш,ения ленты,- в результате чего .не учитываются дополнительные колебания скорости магнитной ленты, вызванные погрешностью кинематической цепи редукто}) - ведущий вал - маг- 30 нитная лента.
Нгшболее близким по технической сущности и достигаемому эффекту к предлагаемому является устройство для управления скоростью перемещения магнитной ленты, содержащее блок . управления подкатушечным узлом, датчик натяжения и датчик скорости ленты, усилитель-ограничитель, частотный детектор, усилитель, фильтр, . до блок выделения сигнала приращения скорости, блок вьделения сигнала приращения натяжения, блок перемножения и привод узла ведущего вала, при этом датчик линейной скорости 5 через, последовательно соединенные усилитель-ограничитель, частотный детектор, усилитель и фильтр подключен к вход-у блока вьщеления сигнала приращения скорости, выход кото 50 рого подключен к одному из входов блока,, перемножения, к другому входу которого через блок выделения сигнала .приращения натяжения подключен дат чик -натяжения ленты, причем выход 55 блока перемножения соединен с вхЪдом блока управления подкатущечным узлом 2. . .
Данное устройство позволяет уменьшить колебания скорости перемещения магнитной ленты, вызванные от-клонениями величины натяжения ленты и скорости ее перемещения от заданных значений, но не исключает колебания скорости движения ленты в зависимости от колебаний угловой скорости ведущего вала, в результате чего снижается качество записи и воспроизведения информации аппарата магнитной записи.
Цель изобретения - улучшение качества записи и воспроизведения информации путем уменьшения степени колебаний скорости магнитной ленты. I .
Поставленная цель достигается
тем, что в устройство для управления скоростью перемещения магнитной ленты, содержащее блок управления подкатушечным узлом, датчик натяжения и датчик скорости ленты, усилительограничитель, частотный детектор, усилитель, фильтр, блок вьщеления сигнала приращения скорости, блок зы деления сигнала приращения натяжения, блок перемножения и привод узла ведущего вала, при этом датчик линейной скорости через последовательно соединенные усилитель-ограничитель, частотный детектор, усилитель и фильтр подключен к входу блока выделения сигнала приращения скорости, выход которого подключен к одному из входов блока перемножения, к другому входу которого через блок выделения сигнала приращения натяжения подключен датчик натяжения ленты, причем выход блока перемножения соединен с входом блока управления подкатушечным узлом, введены цифровой блок измерения скорости вращения ведущего вала, компаратор, сумматор, генератор опорного сигнала, генератор возбуждения и модулятор, при этом привод узла ведущего вала выполнен пьезоэлектрическим,, цифровой блок измерения скорости вращения ведущего вала подключен к одному из входов компаратора, к другому входу которого подключен генератор ;:опорного сигнала, причем один из входов сумматора соединен с входом блока вьщеления сигнала приращения скорости, а другой вход - с выходом компаратора, генератор возбуждения ;соединен с одним из входов модулятора, другой вход которого соединен с выходом сумм;атора, а выход. 1 дулятора соединен с пьезоэлектрическим приводом. Уменьшений колёбаний скорости магнитной ленты достигается за счет возникновения перекрестных связей от введения дополнительного контура управления приводом ведущего вала, т.е. увеличением (согласно теории управления и автоматического регулирования размерности объекта управления, изменившим характеристики уст ройства, а также за счет вьшолнения привода ведущего вала пьезоэлектрического типа, который позволяет . увеличить диапазон компенсируемых значений колебаний линейной скорости магнитной ленты. На чертеже показана функциональна схема устройства. Устройство содержит прижимной ролик 1, установленный с возможностью :Сопряжения через магнитную ленту 2 с ведущим валом 3, направляющие элементы 4 и обводной ролик 5, сопряженный с лентой 2, с которой сопряжен также датчик 6 натяжения ленты. 6 подключен к входу блока 7 выделения сигнала приращения натяжения ленты. Обводной ролик 5 кинематически связан с датчиком 8 линейной скорости ленты 2, которьш через цепь последовательно соединенных друг с другом усилителем-ограничителем 9, частотным детектором 10, усилителем 11 и фильтром 12 подключен к входу блока 13 вьщеления сигнала приращения скорости и к одному из входов сумматора 14. Выход блока 13 выделения сигнала приращения скорости подключен к одному из входов блока 15 перемножения, к другому входу которого подключен выход блока 7 вьщеления сигнала приращения натяжения. Вы ход блока 15 перемножения подключен к входу блока 16 управления подкатущечным узлом 17. Выход сумматора 14 подключен к первому входу модулятора 18, выход которого подкл ючен к пьезо электрическому приводу 19 ведущего -вала 3. К второму входу модулято15а 18 подключен генератор 20 возбуждения пьезопривода 19. Генератор 20/ возбуждения является генератором стабильной частоты. Устройство содержит также цифровой блок 21 измерения скорости вращения ведущего вала 3, подключенного к одному из входов компаратора 22, к другому входу которого подключен генератор 23 опорного сигнала. Выход компаратора 22 подключен к второму входу сумматора 14.л Кроме того, блок 7 выделения сигнала приращения натяжения состоит из последовательно соединенных узла 24 задержки и сумматора 25. Вход узла 24 задержки объединен с входом суьгматора 25 и является входом блока 7, а выход сумматора 25 является выходом блока 7. Блок 13 вьщеления сигнала приращения скорости состоит из задатчика 26 скорости, делителя 27 узла 28 задержки и сумматора 29. Первый ,вход делителя 27 является входом блока 13, а его второй вход соединен с выходом задатчика 26 скорости.. Выход делителя 27 соединен с одним из входов сумматора 29 непосредственно, а с вторым входом - через узел 28 задержки. Выход сумматора 29 служит выходом блока 13. Блок 16 управления промежуточным узлом включает в себя последовательно соединенные интегратор 30, вход которого служит входом блока 16, усилитель 31 мощности и электромагнитный преобразователь 32, выход которого является выходом бло 16, кинематически соединенного с подкатушечным узлом 17. ELnoK 21 измерения скорости ведущего вала 3 состоит из дисковой фотопластины 33 с радиальными щелями, з.акрепленной на .ведущем валу 3, блока 35 источника излу чения и блока 36 фотодиодов, расположенных по разные стороны фотопластины 33. Кроме того, блок 21 включает в себя последовательно соединенные сумматор 37, входы которого подключены к выходам блока фотодиодов 36, триггер 38, первый электронный ключ 39, первый счетчик 40, второй электронный ключ 41, генератор 42 импульсного сигнала и второй счетчик 43. Выход генератора 42 соединен с вторым входом первого электронного ключа 39, выход которого через второй счетчик 43 подключен к второму входу второго электронного ключа 41, третий вход которого подключенк вькоду триггера 38. Устройство работает следующим образом. Магнитная лента 2 перемещается за счет вращения ведущего вала 3, с которым леита сопряжена посредством прижимиого ролика 1 При этом откло511нение скорости перемещения магнитной ленты от ее заданного значения приводит к изменению скорости вращения обводного ролика 5, в результате чего соответствующим образом изменя ется и сигнал на выходе датчика 8 линейной срорости, кинематически свя занного с обводным роликом 5. Затем частотно-модулированный сигнал с выхода датчика 8 поступает на усилитель 11 и преобразуется п синусоидальный сигнал, пропорциональный отклонению скорости от ее среднего значения. Сигнал с выхода усилителя 11, пройдя соответствующую обработку в фильтре 12, настроенном на резонансную частоту колебательной системы датчика 8, подается через сумматор 14 на вход модулятора 18, на другой вход которого поступает сигнал стабильной частоты от генератора 20 возбуждения пьезопривода 19. В . результате этого изменяется амплитуда колебаний пьезоэлемента последнего, что приводит к соответствующему изменению скорости вращения ведущего вала 3. Это в свою очередь приводит к изменению скорости движения магнит ной ленты 2. Так как последняя выпол нена из.эластичного материала, то пр изменении скорости вращения вала 3 в ленте 2 возникают различные виды упругих деформаций (продольная, поперечная и другие , что вызьшает изменение ее длины и появление погрешности в управлении заданной скоростью перемещения. При этом изменяется и сила натяжения магнитной ленты 2, что приводит к изменению сигнала датчика 6 натяжения. Сигнал с выхода этого датчика поступает на вход блока 7 вьщеления сигнала прира щения натяжения, а затем на один из входов блока 15 перемножения, на другой вход которого поступает сигнал с выхода блока 13 вьщеления сигнала приращения скорости ленты. В блоке 15 перемножения формируется сигнал, пройорциональный првизведению сигналов, характеризующих изменения .силы натяжения и коэффициента колебания скорости ленты. Этот сигнал через блок 16 управления подкатушечным узлом 17 осуществляет требуемое измене ние величины натяжения магнитной 1 ленты 2. Для уменьшения колебаний угловой скорости вращения ведущего вала 3 используется контур стабилизации скорости вращения ведущего вала, образованный презиционным цифровым блоком 21 измерения скорости вращения ведущего вала 3, компаратором 22, генератором 23 опорного сигнала, сумматором 14, модулятором 18, генеjpaTopoM 20 возбуждения и пьезоприво|дом 19. Блок 21 осуществляет измерение скорости вращения ведущего вала 3. Сигнал с выхода блока 21 поступает на один из входов компаратора 22, на второй вход которого поступает сигнал от генератора 23 опорного .сигнала. В компараторе 22 определяетЬя отклонение напряжения блока 21 от номинального значения, задаваемого генератором 23.,Это отклонение сигнал ошибки) пропорционально отклонению скорости вращения ведущего вала 3 от требуемого значения. Сигнал ошибки с выхода компаратора 22 поступает через один из входов сумматора 14 на вход модулятора 18 для осуществления модуляции сигнала стабильной частоты генератора 20 возбуждения, что вызывает соответгствующее изменение угловой скорости вращения ведущего вала 3. Поскольку в сумматоре 14 происходит сложение двух сигналов: сигнала опщбки с вы хода блока 21 и управляющего сигнала, пропорционального колебаниям линейной скорости движения ленты 2 с выхода фильтра 12, то закон изменения угловой скорости вращения ведзтцего вала 3 учитьшает оба эти сигнала. Использование изобретения позволит управлять скоростью перемещения магнитной ленты с меньшей величиной коэффициента колебаний скорости, чем у прототипа. Это обеспечивается повышением эффективности действия контура управления линейной скоростью за счет использования в качестве исполнительного привода узла ведущего вала двигателя пьезоэлектрического типа, а такде за счет введения контура стабилизации скорости вращения ведущего вала . При этом достигается значение коэффициента колебаний скорости 0,008 % /в прототипе 0,098} .
I 23 -f22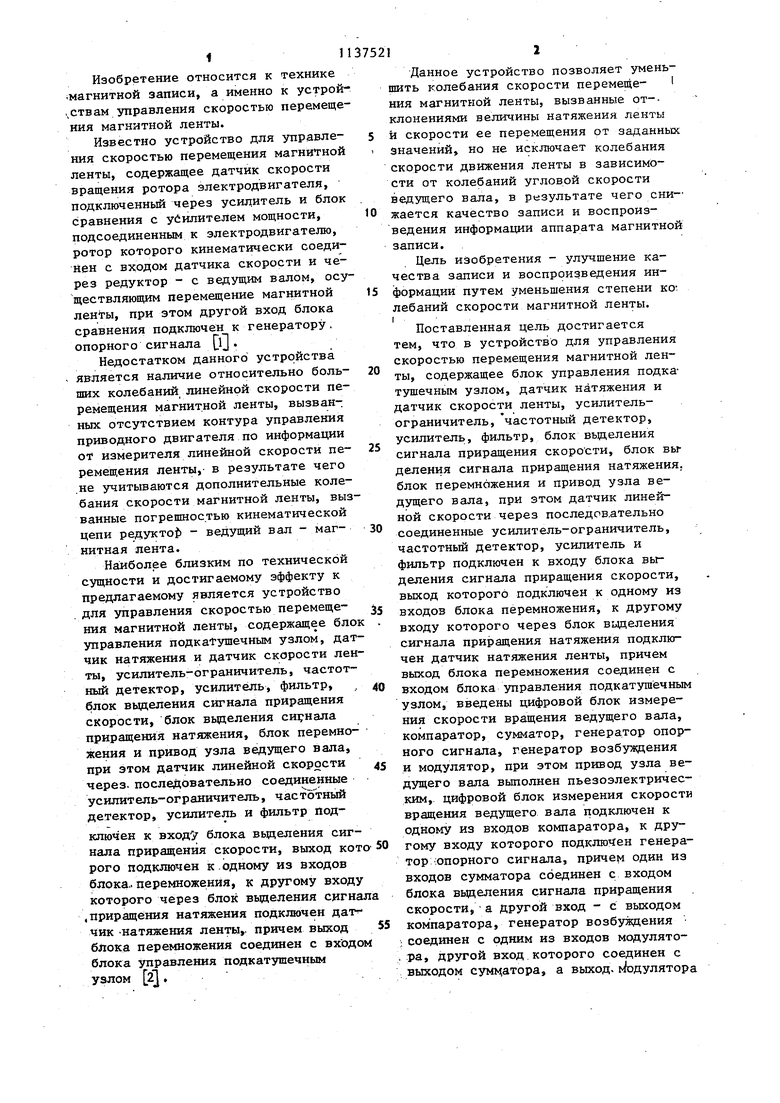

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления скоростью перемещения магнитной ленты | 1980 |
|
SU932561A1 |
| Лентопротяжный механизм | 1981 |
|
SU974409A1 |
| Устройство для перемещения магнитной ленты | 1982 |
|
SU1027771A1 |
| Лентопротяжный механизм | 1983 |
|
SU1101884A2 |
| Устройство для управления скоростью перемещения магнитной ленты | 1982 |
|
SU1056264A1 |
| Устройство для перемещения магнитной ленты | 1983 |
|
SU1089620A1 |
| Устройство для перемещения магнитной ленты | 1989 |
|
SU1691885A1 |
| Устройство для управления скоростью перемещения магнитной ленты | 1981 |
|
SU995118A2 |
| Аппарат магнитной записи | 1983 |
|
SU1081662A1 |
| Устройство для моделирования лентопротяжного механизма | 1982 |
|
SU1070574A1 |
УСТРОЙСТВО .ДЛЯ-УПРАВЛЕНИЯ СКОРОСТЬЮ ПЕРЕМЕЩЕНИЯ МАГНИТНОЙ ЛЕНТЫ, содержащее блок управления подкатуше 1ным узлом, датчик натяжения и датчик скорости ленты, усилительограничитель, частотный детектор, усилитель, фильтр, блок вьделения сигнала приращения скорости, блок вьщеления сигнала приращения натяжения, блок перемножения и привод узла ведущего вала, при этом датчик линейной скорости через последовательно соединенные усилитель-ограничитель, частотный детектор, усилитель и фильтр подключен к входу блока вьщеления сигнала приращения скорости, выход которого подключен к одному из входов блока перемножения. к другому входу которого через блок вьщеленпя сигнала приращения натяжения подключен датчик натяжения ленты, причем выход блока перемножения соединен с входом блока управления i подкатущечным узлом, о т л и ч а ю щ е е с я тем, что, с целью улучшения качества записи и воспроизведения информации путем уменьшения степени колебаний скорости магнитной денты, в него введены цифровой блок измерения скорост вращения ведущего вала, компаратор, сумматор, гейератор опорного сигнала, генератор возбуждения и модулятор, при этом привод узла ведущего вала выполнен пьезоэлектрическим, цифровой блок из(Л мерения скорости вращения ведущего вала подключен к одному из входов компаратора, к другому входу которого подключен генератор опорного сигнала, причем один из входов сумматора соединен с входом блока выделения сигнала приращения скорости, а другой вход - с Bbixoj oM 9 компаратора, генератор возбуждения vj :л соединен с одним из входов модулятора, другой вход которого соединен с hO выходом сумматора, € выход модулятора соединен с пьезоэлектрическим при-; водом.
| I | |||
| Устройство для управления скоростью движения магнитной ленты | 1975 |
|
SU513385A1 |
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство управления скоростью перемещения магнитной ленты | 1980 |
|
SU932561A1 |
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
